基于LSTM 的落速控制最优制导策略研究
2022-05-12温求遒黄文宇卢宝钢
温求遒,黄文宇,卢宝钢
(1. 北京理工大学 宇航学院,北京 100081;2. 北京航天长征飞行器研究所,北京 100076)
高超声速飞行器具有高速、高机动、大航程的特点,能够对目标进行快速精确打击[1],高超声速飞行器飞行环境的复杂性,给制导控制系统的设计带来了挑战[2−3]. 而随着技术发展,高超声速飞行器对末端命中速度逐渐提出了新的要求. 例如,潘兴 II 弹头必须减小弹道末端的飞行速度,以免被严重的气动加热所产生的等离子体形成信号屏障,导致弹上雷达无法正常工作[4]. 因此,对于高超声速飞行器而言,合理的末端速度控制策略,对于其精确命中目标至关重要.
高超声速飞行器通常对末端命中指标具有多方面要求,近年来研究者相继提出了多种考虑终端约束的制导律,能够同时满足终端位置及落角等约束,并已经广泛应用于精确末制导打击作战领域[5−10],而采用末端多约束制导律时,对末速进行控制成为了新的难题. 目前,对于高超声速飞行器的末端减速方法大致可以分为两类:一类通过增加飞行距离,来达到减速效果[11−14];另一类通过增大飞行攻角,利用诱导阻力进行减速控制[1,15−18]. 增大飞行距离的方法能够在一定程度上降低飞行速度,但由于飞行距离与速度的精确关系很难确定,减速控制精度较差[1];而增大飞行攻角的方法能够有效实现减速,但在飞行过程中叠加额外攻角指令,通常需要持续大攻角飞行,这不利于飞行器的稳定飞行和精确控制. 因而有必要提出一种不依赖于附加额外攻角指令,仅着眼于制导参数设计本身的末端多约束制导律的减速控制策略,使飞行器能够在满足末端精度和落角约束的同时,提升对弹道末端速度的控制能力.
人工神经网络(artificial neural network, ANN)由于其强大的任意函数逼近能力、并行处理能力及其自学习、自适应和自组织等特点,成为了模型拟合、图像语音识别、数据预测等研究的重要手段,目前已在众多领域得到应用[19−23]. 长短时记忆(long shortterm memory,LSTM)神经网络善于处理时间序列输入数据,可以有效捕获复杂时序数据中的长期依赖信息,并构建运算迅速、拟合度高、不依赖物理建模的拟合模型,近年来在时变参数辨识、故障诊断等领域都获得了成功的应用[23−26]. 针对飞行器飞行过程的在线辨识、运算、设计等问题,本质上是对弹上传感器提供的时序输入数据的处理问题,LSTM 网络能够为这些问题提供值得尝试的新思路.
针对高超声速飞行器末端减速控制的需求,本文以落角约束最优制导律为基础,分析了其量纲一过载特性,提出了末速控制的策略,并基于此提出了对气动偏差适应的在线控制策略;以LSTM 深度神经网络算法为基础,设计了制导律参数在线设计算法,并对所设计算法的速度控制效果进行了弹道仿真验证.
1 落角约束最优制导律末速控制策略
1.1 落角约束最优制导律
高超声速飞行器末制导段二维平面内的运动关系如图1 所示.
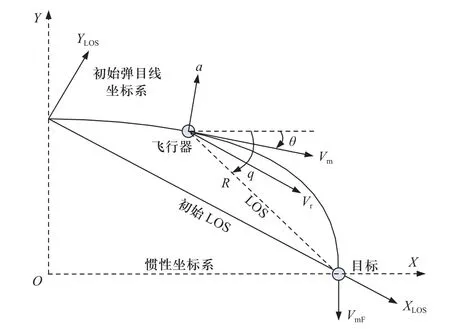
图1 飞行器末制导段运动关系示意图Fig. 1 Schematic diagram of the motion relationship of the aircraft terminal guidance section
图中,R为弹目视线(LOS)距离,Vm为飞行器速度,Vr为 飞行器速度在初始弹目视线方向的分量,a为飞行器合过载, θ为弹道倾角,q为当前弹目视线角,VmF为期望的终端落速方向.
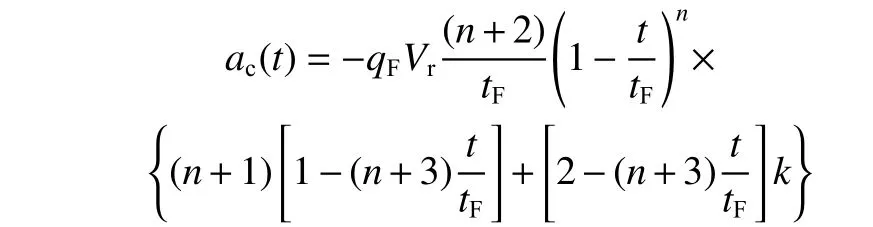
本文以文献[27]推导的多约束最优末制导律作为基础

式中:ac(t)为 制导律的过载指令;Np、Nq分别为比例导引项和落角约束项的权系数,由制导阶次n确定q˙为 弹目视线角速度;qF为 期望的终端落角;tgo为预估的剩余飞行时间.

1.2 量纲一过载特性与末速控制策略
落角约束最优制导律的制导相对角度关系图如图2.
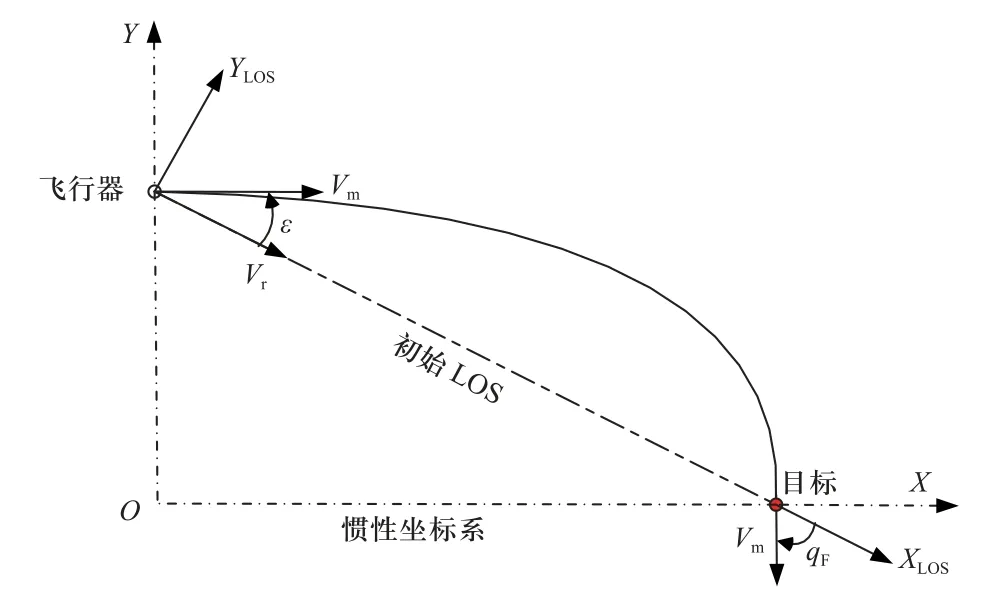
图2 制导相对角度关系示意图Fig. 2 Schematic diagram of the relative angle of guidance
图中 ε为末制导段初始速度指向误差角,即末制导起始位置弹体速度方向与初始弹目视线的夹角;qF为终端期望落角,即弹体落地位置弹体速度方向与初始弹目视线的夹角.
考虑初始速度指向误差和终端期望落角影响时,制导指令可以表示为[27]
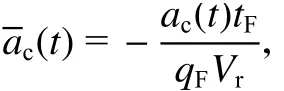
则有
为分析不同制导条件下,飞行能量消耗情况,定义量纲一机动能量,其数学表达式为

即量纲一过载的平方对量纲一时间全飞行过程积分的结果. 表征了整个末制导过程中用于机动控制飞行器所消耗的能量,其值越小,表明该制导过程的过载指令平均值越低,弹道越平滑;反之,量纲一机动能量越大,表明制导过程中弹道平均弯曲程度越大,这会导致制导过程中飞行器损失更多动能,从而降低飞行速度.
观察制导阶次n和角度因子k取不同值时,飞行器量纲一机动能量的对比如图3 所示.

图3 不同n-k 取值的量纲一机动能量变化趋势Fig. 3 Dimensionless maneuvering energy change trend with different values of n-k
由图3 可以看到,对于每一个确定的n取值,量纲一机动能量随k的变化趋势均呈现近似抛物线的先减后增规律;而相同角度因子k取值下,n取值越大,其量纲一机动能量值越大,表明其完成制导消耗机动能量越大,这为设计n取值进行减速控制提供了可能.
以某弹道为实例进行上述规律的验证,如图4、图5 所示.
图4 弹道对比曲线Fig. 4 Ballistic comparison curve

图5 速度对比曲线Fig. 5 Speed comparison curve
可以看到,随着制导阶次n逐渐增大,弹道在末制导切换后的抬升−下压趋势越明显,弹道弯曲程度越大,而末端落速也就越小. 表明制导阶次n对于飞行轨迹以及末端落速均有影响,合理选择制导阶次n,能够达到在一定范围内控制飞行器的飞行轨迹和飞行速度的效果.
1.3 气动偏差适应性在线设计策略
对于6 自由度的高超声速飞行器动力学模型,鉴于其复杂的气动环境,力系数、力矩系数、大气密度等参数易出现预估偏差,同时实际飞行过程的风场条件通常亦难以精确测定. 故对于高超声速飞行器而言,离线装定的制导规律往往无法满足实际飞行需求,需要对制导阶次n进行在线设计,以在气动偏差条件下,仍能够确保命中精度和末端落角,并使末端落速满足指标要求. 基于此,本文在弹道仿真中引入气动参数的随机拉偏,以模拟实际飞行条件下可能出现的气动参数偏差. 本文设定的气动拉偏项目及范围如表1 所示.
表1 气动参数拉偏模式Tab. 1 Pneumatic parameter pull mode
对于通常的辨识−修正−执行的偏差应对策略而言,在气动偏差出现时,应首先辨识出偏差量,以此为基础修正动力学模型中的相关参数,进而变更制导控制策略,达到应对偏差的效果. 而当多项气动参数偏差需要同时考虑时,辨识环节便难以实现. 本文设定的气动拉偏项目共计9 个,与之相对的观测量为6 个,即陀螺仪测量的飞行器3 通道角速度 ωx、 ωy、ωz, 和 加 速 度计 测 量 的3 个方 向 的 加 速度ax、ay、az,根据可观性原理,9 个独立的气动偏差项目不具有可观性,所以辨识环节理论上无法实现. 不过在飞行初始条件确定的前提下,全程的角速度与加速度变化理论上仍然可以完全体现飞行器的运动学以及动力学特征,能够成为制导阶次n的选取依据. 因此可以在制导参数设计时,略过气动偏差的辨识环节,转而构建弹上传感器观测量与制导律设计参数的直接对应关系,如图6 所示.
图6 略过辨识环节的制导参数在线设计策略Fig. 6 Guidance parameter online design strategy skipping the identification link
图6 中的制导参数在线设计环节,实际上就是弹上传感器观测量与最优的制导律设计参数的直接对应关系,可以通过建立弹体动力学模型-弹道仿真-制导参数寻优的流程来建立该关系,但该流程结构复杂、运算量大的特点,决定了其并不适用于弹上计算机进行制导律在线设计. 因此,本文采用拟合度高、运算量小、善于处理时序输入信息的LSTM 神经网络算法,用于进行弹上传感器观测量与最优的制导律设计参数的直接对应关系的拟合,以实现制导参数的在线精确、快速设计.
2 基于LSTM 的制导参数在线设计算法
2.1 LSTM 神经网络结构
LSTM 属于循环神经网络(RNN)的一种类型,解决了一般的RNN 存在的长期依赖问题. LSTM 基础模型因其能凭借对于时间序列相关数据内部长距离对信息依赖能力的有效利用,可实现在预测基础模型内的广泛运用[26]. 图7 为标准LSTM 网络结构的示意图.
图7 标准LSTM 网络结构Fig. 7 Standard LSTM network structure
LSTM 网络通过门结构对细胞状态进行删除或者添加信息,一个LSTM 细胞中包含遗忘门、输入门和输出门来控制细胞状态. LSTM 的前向通路的计算公式为
式 中:xt为 本 时 刻 的 输 入;ht−1则 为 上 时 刻 的 输 出;Wxi、Wxf等为权重矩阵;bi、bf等为对应偏置矩阵,用于对输入量xt和ht−1做 线性变换;it、ft、gt、ct、ot分别为本时刻的输入门、遗忘门、输入门增益、细胞状态,以及输出门;ht为本次细胞运算的最终输出,由输出门ot和 更新后的细胞状态ct共 同决定;而 σ(x)和tanh(x)分别为sigmoid 激活函数和tanh 激活函数,用于进行非线性化处理; ∗为矩阵点乘运算

上式为单隐藏层的运算过程,当隐藏层不止一层时,只需将上一层的输出矩阵作为下一层的输入矩阵,即可实现多隐藏层的串联运算.
与一般神经网络类似,LSTM 神经网络的训练是一个给运算矩阵赋予初值,将前向通路输出与理想输出之间的误差(LOSS)进行反向传递,计算细胞各权重矩阵和偏置矩阵的梯度下降方向,并修正运算矩阵中的变量的过程. 采用训练集对矩阵变量进行反复训练,直到训练相关系数达到合格水平.
2.2 离线训练集生成策略
飞行器气动参数偏差产生原因复杂,偏差正负及大小难以预测,生成训练集时应充分考虑各种拉偏组合的可能性. 综合考虑工程实际情况,本文将气动参数拉偏模式设定如1.3 节中表1 所示.
对于训练集输入的设计,以随机一组气动拉偏下传感器的观测量时间序列作为训练集输入:选取弹上测量器件直接获取的弹体角速度 ωz、 ωy、 ωx以及加速度ax、ay、az为观测量,共计6 维;在中制导开始的3 s 时间内,每隔1 s 进行一次数据采集,共采集4 次,作为训练集模拟输入.
对于训练集输出,在该组气动拉偏条件下进行弹道仿真,通过牛顿迭代法对制导阶次n进行迭代寻优,直到弹道末端命中精度、落角、落速满足或最接近设计指标,并以寻得的最优制导阶次n作为训练集的一个输出. 在某些气动拉偏情况下,n取0 时的末端落速即小于理想落速,此种情况下则将n取0,以达到设计优化的极限.
同时注意到,在某些气动拉偏情况下,即便制导阶次n取到最大值,也无法满足末速条件,或者能够满足末速条件,但n的取值已经接近造成末端脱靶的极限,实际飞行时若按照该n值进行制导律设计,则很容易造成脱靶. 故应考虑在训练集输出中添加指示器kmax, 用于判断n取值是否接近脱靶极限,若优化取得的n值已接近脱靶极限,则kmax=1, 否则kmax=0.
综上,训练集输出为最优制导阶次n与脱靶极限指示器kmax,共计2 维,如图8 所示.

图8 训练集的生成流程Fig. 8 Generation process of training set
2.3 基于LSTM 的制导参数在线设计算法
高超声速飞行器的典型飞行轨迹,一般可分为中制导滑翔段以及末制导成型段,当飞行器导引头捕获目标时,即转入末制导成型段. 采用LSTM 深度神经网络,选取中制导段中某段时间内的弹上传感器观测量序列作为依据,结合LSTM 网络的离线训练结果,可进行末制导律的设计参数在线设计,流程图如图9 所示.
图9 基于LSTM 的制导参数在线设计策略Fig. 9 Online design strategy of guidance parameters based on LSTM
如图9 所示,利用生成的离线训练集,进行LSTM 权重矩阵的离线训练,将训练结果装定于在线设计环节中,以实时获取的传感器观测数据作为输入,运算并输出制导参数在线设计值,进行制导参数n的在线设计,以期满足预定的末端速度指标.
制导阶次n的在线设计环节中,若指示器kmax的值接近1,则表明n取值大概率接近脱靶极限,需要在自动设计的n基础上留出余量 ∆n,以防止在线设计的制导参数n过大而导致末端脱靶. 故在工程应用时,可对在线输出的结果n进行如下处理
结合n的一般合理取值范围,选取 ∆n=0.03作为防止脱靶的余量.
3 仿真分析
3.1 仿真条件
本文设定的弹道仿真初始条件如表2. 制导律设计的末端约束指标如表3.
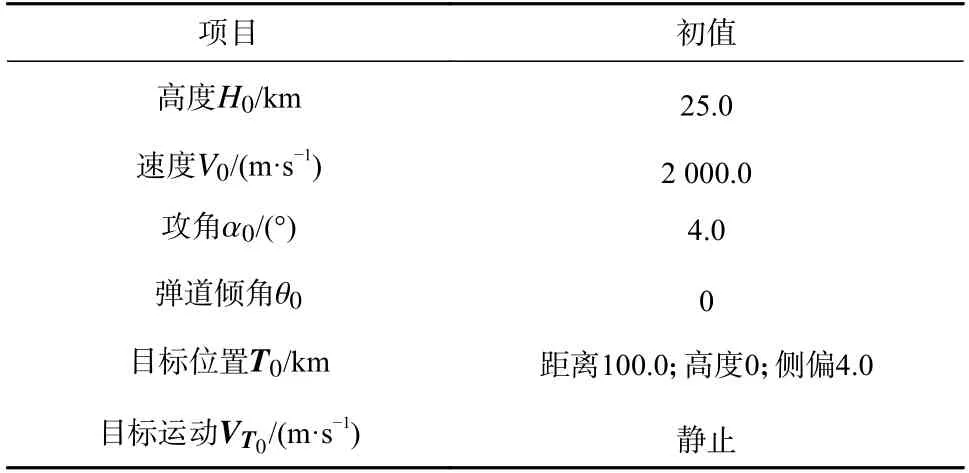
表2 弹道仿真初始条件Tab. 2 Initial conditions of ballistic simulation
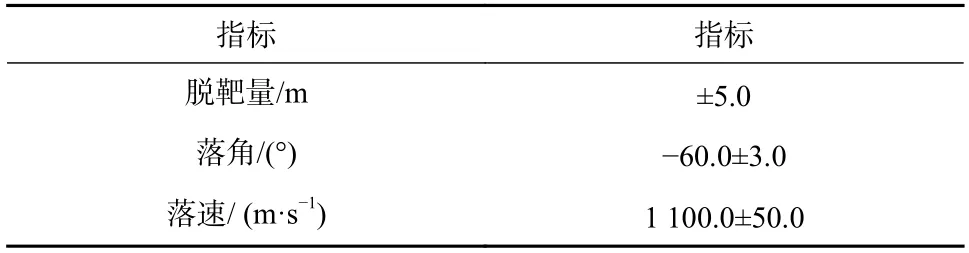
表3 末端约束指标Tab. 3 End constraint indicators
用于在线参数设计的LSTM 矩阵的隐藏层数设定为2,训练学习率LR设定为0.01,隐藏层神经元数量按照以下经验公式选取

式中:ni为输入维度,此处为6;no为输出维度,此处为2;则隐藏层神经元个数nh为72.
与训练集生成过程类似,制导参数在线设计时,从飞行器进入中制导段的时刻开始,每隔1 s 进行一次弹上传感器的数据采集,持续3 s,共采集4 次,作为制导参数在线设计环节的输入.
3.2 离线训练与弹道仿真结果
采用离线训练集生成策略,获取1 000 组随机气动参数拉偏组合对应的训练集输入和输出,对LSTM权重矩阵进行迭代训练,其训练相关系数随迭代次数变化规律如图10 所示.
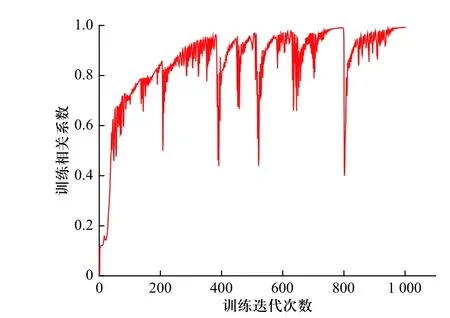
图10 训练相关系数随迭代次数变化规律Fig. 10 Training correlation coefficient changes with the number of iterations
可以看到,在1 000 次的迭代过程中,训练相关系数收敛性良好,最终能稳定达到0.99 以上,表明设计输入与输出之间的对应关系模型拟合程度非常高.
将离线训练完成的LSTM 权重矩阵装定于弹道仿真程序中,进行带气动偏差的弹道仿真,对比分析采用制导参数在线设计的速度控制效果. 当升力系数CL拉 偏+10%,以及大气密度 ρ拉偏−10%时,飞行器飞行轨迹、飞行速度、弹道倾角以及量纲一机动能量的对比图如图11~图14 及表4,表5 所示.

表4 升力系数C L拉偏+10%弹道仿真结果对比Tab. 4 Comparison of trajectory simulation results of lift coefficient deflection +10%

表5 大气密度 ρ拉偏−10%弹道仿真结果对比Tab. 5 Comparison of trajectory simulation results of atmospheric density biased by -10%
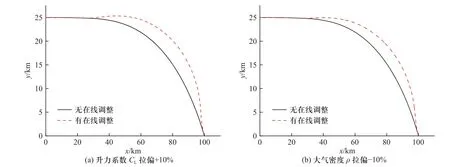
图11 弹道对比曲线Fig. 11 Ballistic comparison curve
图12 速度对比曲线Fig. 12 Speed comparison curve
图13 弹道倾角对比曲线Fig. 13 Ballistic inclination comparison curve
图14 量纲一机动能量对比曲线Fig. 14 Comparison curve of dimensionless maneuvering energy
可以看到,在升力系数CL拉偏+10%和大气密度ρ拉偏−10%的条件下,在线设计的制导规律具有大曲率、大机动的特征,达到了降低末端飞行速度的效果,同时也保证了原本制导律末端命中精度以及落角的误差满足指标要求.
同时值得注意的是,飞行过程中飞行器减速的幅度并没有其机动能量增大的幅度明显,究其原因是,抬升−下压模式的弹道设计,会在一定程度上使得飞行后段以更大的弹道倾角下落,从而造成飞行速度增加的反效果. 不过总体上,在线设计的制导参数对于飞行器末端落速的影响仍然是减小,并达到了良好的末速控制效果.
3.3 蒙特卡洛仿真结果
为分析在气动参数出现随机偏差时,采用制导参数在线设计的末端速度控制效果,进行气动参数随机拉偏的多条弹道的随机仿真,形成曲线簇,以对仿真结果进行直观展现. 飞行器飞行轨迹、飞行速度、弹道倾角以及量纲一机动能量的曲线如图15~图18 所示.
进行气动参数随机拉偏的1 000 条弹道的蒙特卡洛仿真,对比分析采用制导参数在线设计算法的末端速度控制效果. 气动参数拉偏范围同样按照表1的模式设定. 飞行器的末端落点偏差、末端落角、末端落速,以及飞行过程的量纲一机动能量对比图如图19~图22 所示.
图 15 随机仿真弹道曲线簇Fig. 15 Ballistic curve cluster

图 16 随机仿真速度曲线簇Fig. 16 Velocity curve cluster

图 17 随机仿真弹道倾角曲线簇Fig. 17 Ballistic inclination curve cluster
图 18 随机仿真量纲一机动能量曲线簇Fig. 18 Dimensionless maneuvering energy curve cluster
图19 末端落点偏差量散布对比Fig. 19 Comparison of dispersion of end point deviation
图20 末端落角散布对比Fig. 20 Comparison of end drop angle dispersion
图21 末端落速散布对比Fig. 21 Comparison of terminal speed distribution
图22 飞行过程量纲一机动能量散布对比Fig. 22 Comparison of dimensionless maneuvering energy distribution during flight
随后分析上述各散布图像的统计学数据,如表6所示.
表6 弹道各指标统计结果对比Tab. 6 Comparison of statistical results of ballistic indicators
通过对上述4 组蒙特卡洛仿真图像及统计学数据可以看到,相比无在线设计的制导弹道,采用在线设计环节的弹道虽然落点偏差和落角散布增大,但仍分布在指标要求范围内;而当气动参数存在如表1设定范围的偏差时,无在线设计的末端落速仅有42.00%的弹道能够满足末速需求,而采用在线设计的弹道有80.80%能够满足末速需求,相比无在线设计时提升近一倍的概率. 表明在线设计的制导规律在满足其他末端指标的同时,对弹道的末端速度控制能力有显著提升.
值得注意的是,在量纲一机动能量的散布数据对比图像中,不采用在线设计的机动能量散布十分密集,所有弹道机动能量均散布在0.5 附近,而采用在线设计的机动能量散布图中,一部分弹道的机动能量散布在1.0~5.0 之间,而另一部分则与不采用在线设计相同,散布在0.5 附近. 究其原因,是在训练集生成过程的n值寻优策略中,当仿真弹道落速小于理想落速时,则直接将n取为0 作为训练集输出,使得这些气动参数拉偏的组合对应的n取值均为0,故其弹道量纲一机动能量分布与不采用制导参数在线设计的情况相同.
4 结 论
针对高超声速飞行器,本文以落角约束最优制导律为基础,对制导律的量纲一过载特性进行分析,提出了通过设计制导阶次n进行末速控制的策略,并基于此提出了对气动偏差适应的制导参数在线设计策略;以LSTM 深度神经网络算法为基础,设计了制导律参数的离线训练算法与在线设计算法;最后通过极限拉偏与随机拉偏仿真,验证了所设计的在线制导参数设计算法在气动偏差存在情况下,通过改变制导阶次n,在保证末端命中精度和落角满足指标要求的前提下,对弹道的末端速度控制能力有显著提升. 虽然弹道下压段会有速度提升的情况,不过设计总体结果为末速减小,能够满足设计需求. 表明本文基于LSTM 深度神经网络算法所提出的制导参数在线设计方法,具有精度可靠、响应快速、鲁棒性强的特点,具备较好的工程应用价值.
