基于改进人工势场的AGV路径规划算法①
2022-05-10李钧泽焦艳菲刘淳文
李钧泽,孙 咏,焦艳菲,刘淳文,隋 东
1(中国科学院大学,北京 100049)
2(中国科学院 沈阳计算技术研究所,沈阳 110168)
3(沈阳中科数控技术股份有限公司,沈阳 110168)
随着新兴物流产业的发展,新建仓储物流系统已逐渐实现了仓储智能自动化.作为智能仓储的重要组成部分,AGV (automated guided vehicle) 即自动导引车,在物流行业的应用正变得越来越广泛.但对已建成多年的老旧仓库,由于其厂房仓库存在障碍物多杂且形状不规则等特点,使 AGV的寻径效率极大降低,严重阻碍了其智能化改造的进程.
路径规划即根据 AGV 所处的环境信息、运输任务的位置信息,依照相应评价标准,规划的一条从起始位置到目的位置的无碰撞最佳路径[1].常用的路径规划算法有 Dijkstra 算法、A*算法、人工势场算法、蚁群算法、遗传算法等.其中人工势场法(artificial potential field,APF)具有结构简单、动态适应强、计算量小等优点,因此在实时避障与仓储物流领域得到了广泛的使用.
但传统的人工势场算法存在一定的局限性,例如目标不可达问题、局部极小值问题等[2,3].对此,国内外的专家学者各自提出了不同的改进人工势场法来解决通用环境下的缺陷问题.赵明等[4]创新性地提出了自适应域—人工势场改进算法,并通过域引导势场对启发点进行了域势场传递,此种改进算法较好地解决了局部极小值问题.唐嘉宁等[5]在改进算法中引入了电场中的模拟等势线概念,并对原算法中的斥力函数进行了改进,此改进算法有效解决了局部极小值问题.Weerakoon 等[6]提出了一种无死锁的改进人工势场算法,该算法通过引入与速度方向相关联的障碍物信息,解决了传统算法中目标点不可达与局部极小值问题.Fedele 等[7]为解决多障碍物势场叠加引起的局部极小值问题,提出了一种基于势场切换策略的改进人工势场算法.
本文拟在老旧仓库这一特定环境下进行研究,文中提及的老旧仓库特指具有以下特点的仓库.
(1)建成时间距今已超5年.
(2)仓库内货架堆积无序且紧密.
(3)仓库内杂物分布随机且与货架摆放位置无明显边界.
本文将在此处预先对下文所提及算法进行明确指代.其中后文提及的传统人工势场法是指 Khatib 于1986年首次提出的人工势场算法[8],后文中将以T-APF(traditional artificial potential field)代指.而针对本文所提出的新型改进人工势场算法,后文将以I-APF(improved artificial potential field)代指.
针对传统人工势场算法(T-APF)中存在的缺陷,本文提出了一种新型的改进人工势场算法(I-APF),该算法通过对引力与斥力的修正,解决了目标点不可达问题及易与远目标端障碍物相撞问题;通过添加临时障碍物的手段,解决了局部极小值问题.借由上述手段,提升了老旧仓库中人工势场算法寻径成功率.最后使用 Matlab 软件,对 I-APF的有效性进行了验证.
1 传统的人工势场算法
人工势场算法是由 Khatib 提出的,并首先应用于机械臂的运动规划领域[8],后经发展现广泛应用于路径规划领域.在路径规划问题中,人工势场分别由目标点产生的引力势场与障碍物产生的斥力势场叠加而成.AGV 小车在人工势场中受到势场合力的作用,避开沿途障碍物,向目标点运动.
1.1 引力势场
为使 AGV 小车能够顺利到达目标点,引力势场的强度随与目标点的距离增大而增大.因此,在T-APF 中引力势场Uatt的定义为:

其中,Uatt代表引力势场,katt为引力势场常数,X表示AGV 所在当前点的位置坐标,Xg表示目标点的位置坐标,d(X,Xg)表示当前位置与目标点间的欧氏距离.
引力则定义为势场的负梯度其表达式为:

1.2 斥力势场
为使 AGV 可以避开障碍物,斥力势场需要满足势能随 AGV与障碍物的接近而增大,远离而减小,当二者距离增大至斥力势场所影响的最大距离d0时,障碍物与AGV 无碰撞的可能性,斥力势场的大小应置为0.
类似的,斥力的定义为斥力势场的负梯度.
斥力势场及斥力的表达式如下:


其中,Urep为斥力势场,krep为斥力势场常数,X0表示障碍物的位置坐标,d(X,X0)表示当前位置与障碍物之间的欧氏距离,d0为斥力势场影响的最大范围.
1.3 老旧仓库环境下传统AGV 存在的缺陷
1.3.1 与远目标端障碍物相撞
由式(2)可知,引力大小与AGV 及目标点间的距离呈线性关系.在路径规划初期,由于 AGV 距离目标点较远,AGV 受到的引力较大.因此在接近障碍物之前,AGV 已具有较大的初速度,即使随着与障碍物的接近斥力在逐渐增大,但引力的作用及惯性的存在仍使得 AGV 会与远目标端障碍物相撞.
1.3.2 目标点不可达
由式(2)与式(4)可知,如果目标点附近存在障碍物,随着 AGV 逐渐向目标点与障碍物靠近,斥力大小在逐渐增大,引力大小在逐渐减小,在到达某一区域时会出现斥力大于引力的情况,使得小车背离目标点运动,当离开此区域时,引力再次占据主导地位,小车重新向此区域运动,如此循环小车只能在目标点附近振荡徘徊,最终停在势能最低点处.
通用场景下由于障碍物分布稀疏,在目标点处附近存在障碍物的概率很低,实际使用中一般不考虑该问题.而老旧仓库这一特定环境中,由于空间狭小,货架、货物、障碍物分布密集,目标不可达的发生概率极大增加,因而在该环境下目标点不可达问题成为了AGV 路径规划的严重阻碍.
1.3.3 局部极小值
局部极小值的实质就是在路径某处出现了斥力与引力的平衡态,使得AGV 陷入了局部稳定状态.如图1所示,本文将局部极小值分为以下两种情况:其一为开放式障碍物影响下的局部极小值,该类缺陷通常由多个障碍物组成,且障碍物间存在能使 AGV 直接穿越的间距,当 AGV 陷入其中时,由于受到相互平衡的斥力与引力,无法继续前进.其二为半封闭式障碍物影响下的局部极小值,此类缺陷由孤立障碍物或多个间距极小的障碍物组成(障碍物间距不足以使 AGV 直接穿越).当 AGV 陷入其中时,无法通过直接穿越障碍物进行逃脱.同前者相似,AGV 在陷阱内受到相互平衡的斥力与引力,无法继续前进.

图1 开放式及半封闭式局部极小值示意图
在老旧仓库中由于障碍物的分布较通用场景下多而密,且分布的复杂程度、无序程度极大增加.因而通用场景下出现频率极低的引力斥力平衡现象即局部极小值缺陷,在老旧仓库中出现的频率极大增加,成为了不容轻视的问题.
2 改进人工势场算法
现在对传统人工势场算法的主流改进方式,多着眼于先对势场改进,进而间接影响势场力,最后改变AGV 运动状态[9-11].以文献[10]中的改进算法为例,其通过在T-APF 斥力势场公式,即式(3)后添加AGV与目标点欧氏距离的n次幂作为距离因子,使得 AGV与目标点的距离也成为影响斥力势场的因素之一.在对其改进的斥力势场求负梯度后得到一个复合斥力.该复合斥力由两个分力构成,其中一个斥力方向同原T-APF中的斥力,由障碍物指向AGV,另一斥力的方向由AGV 指向目标点.这种改进方式虽被证明是有效的,但是通过其改进势场求得的复合斥力表达式冗余且复杂,直接导致了路径规划效率的降低.而本文直接对势场力进行了优化,不再关注势场本身,所得模型既兼顾了传统算法的简洁形式又不受到缺陷影响.
2.1 引力的改进
对引力改进针对的是与远目标端障碍物相撞及目标点不可达缺陷.针对前者缺陷,根源在于远离目标点时引力大于斥力.如果直接减小全局引力势场常数,这样虽然可避免AGV 在远离目标点时与障碍物相撞,但当接近目标点时易因引力不足而造成目标点不可达的问题.因此,为兼顾远距离处避碰,近距离处目标点可达,本文通过设定引力势场安全距离常量ds将引力函数分段,在距离目标点较近的部分引力势场常数可以适当增大,有助于解决接近目标点时引力不足造成的目标不可达问题.在距离目标点较远的部分,应适当减小引力势场常数,避免与障碍物相碰.改进后的引力势场可以兼顾远距离处避碰,近距离处目标点可达.其表达式如式(5)所示:

其中,k*att为较小的引力势场常数,j*att为较大的引力势场常数,ds为引力势场安全距离常量.
2.2 斥力的改进
对斥力的改进针对的同样是与远目标端障碍物相撞及目标点不可达缺陷.同时解决这两个缺陷的关键在于,要确保 AGV 在路径规划途中,非碰撞的情况下引力始终略大于斥力,从而使AGV 持续向目标点运动.由引力表达式(5)可知,随着 AGV与目标点的靠近,引力大小在不断减小,此时若不对斥力大小进行削减,极易造成靠近目标点时,斥力大于引力,出现目标点不可达现象.若直接减小斥力势场常数,由式(5)可知,在路径规划初期引力极大,AGV 易与远目标端障碍物相撞.因此斥力的变化趋势需同引力一致.于是在原斥力表达式中,加入 AGV 当前位置与目标点的欧式距离作为因数,使引力与斥力的变化趋势基本一致.在此基础上,通过调整斥力势场常数使斥力略小于引力,即可顺利规划路径.改进后的斥力表达式如式(6)所示:

其中,d(X,Xg)为AGV 到目标点的欧氏距离.
2.3 临时障碍物的引入
AGV 陷入局部极小值的原因是路径规划途中出现了斥力大于等于引力的区域(也称陷阱区域),导致 AGV在该区域内出现局部振荡现象,无法逃离.本文拟采用添加临时障碍物的方式破坏 AGV 在陷阱区域内力的平衡态,实现 AGV的逃离,随后再删去临时障碍物.具体逃离策略分直接穿越陷阱区域与绕行陷阱区域两种.
对于半封闭式局部极小值问题,由于障碍物分布极为连续,AGV 无法做到直接穿越,因此只能选用绕行方式逃离陷阱区域.对于开放式局部极小值陷阱,由于障碍物分布较为稀疏,为使规划路径尽可能短,采用直接穿越方式逃离陷阱区域.
2.4 改进人工势场算法的步骤
算法1.改进人工势场算法X Xg k*att j*att dskrep d0 rtn0 l n 1) 参数初始化.首先初始化位置参数,包括 AGV的起始位置,目标点位置,障碍物位置坐标数组.其次初始化 APF的模型参数,包括引力势场常数、,引力势场安全距离常量,斥力势场常数,斥力势场最大影响范围,陷阱半径,最大逃离迭代数.最后初始化模拟仿真参数,包括步长,最大循环迭代次数.2) 进入循环体,并计算 AGV 所受合力.分别计算目标点对当前位置处AGV的引力及 AGV 受到的所有障碍物产生的斥力,并对引力与所有斥力求和.3) 计算 AGV 经过迭代后的坐标.通过合力与当前位置坐标,依据牛顿运动定律,计算下一路径点 AGV 坐标,并将其置为AGV 当前位置点.

4)判断AGV是否达到目标点.本算法规定当AGV与目标点距离小于迭代步长,视为AGV 已到达目标点.计算目标点与AGV 距离,与作比较,若 则表示 AGV 没有到达目标点,将继续执行第5) 步.否则判定 AGV 已经到达目标点,将当前路径点坐标与目标点坐标加入轨迹数组,退出循环迭代,程序结束.l d(X,Xg) ld(X,Xg)>l 5) 判定 AGV是否与障碍物相撞.本算法规定当AGV与障碍物距离小于步长 时,视为AGV与障碍物相撞.计算当前位置与所有障碍物的距离,取其中最小值与比较,若 则表示 AGV 没有与障碍物相撞,继续执行第6) 步.否则判定 AGV与障碍物相撞,程序结束.l dmin ldmin>l 6) 判定 AGV是否陷入局部极小值.若当前迭代次数大于最大逃离迭代数,计算当前点位置坐标与前n0 个位置坐标 距离,当时,判定 AGV 陷入局部极小值陷阱,此时添加临时障碍物后返回第2) 步继续循环迭代.其他情况则视为没有陷入局部极小值,直接返回第2) 步继续迭代.n0 XXn0 d(X-Xn0)<rt
3 算法的仿真与分析
本文使用 Matlab 对所提出的改进人工势场算法进行仿真实验,其中测试主机为Acer Aspire VN7-591G,配置为Intel(R) Core(TM) i5-4210H 2.90 GHz,内存为12 GB,并在Windows 10 操作系统下进行仿真,测试算法的有效性.
图2针对的是与远目标端障碍物相撞缺陷的路径规划仿真.该组仿真的参数如下:起点(0,0),终点(10,10)katt=30,k*att=10,j*att=30,krep=2,d0=3,l=0.2.如图2所示,在使用 T-APF 进行路径规划时,AGV 在(2,2)处与障碍物发生碰撞.而使用 I-APF 时AGV 则成功达到目标点处.如前所述,I-APF 能够成功避障的原因如下,其一为对引力表达式的改进,引入了k*att,使得 AGV 在距目标点较远时引力较小.其二,对斥力的改进,在斥力表达式中加入因数d(X,Xg)使得斥力大小的变化趋势同引力一致.因此,在距离目标点远时斥力也相应地增大了,避免出现引力远大于斥力的情况.

图2 与远目标端障碍物相撞缺陷环境中的路径规划
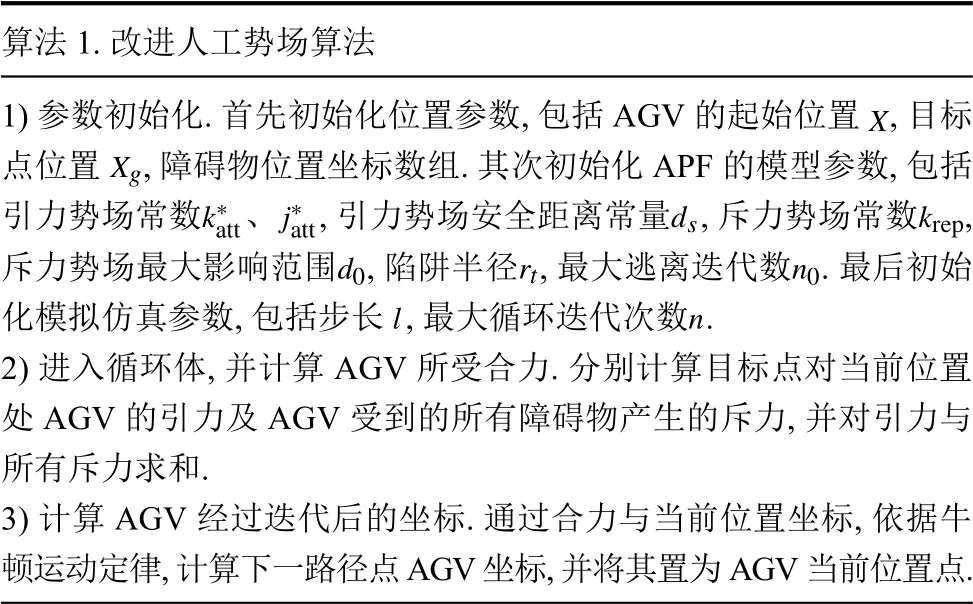
图3针对的是老旧仓库中易出现的目标点不可达缺陷的路径规划仿真.该组仿真参数如下:起点(0,0)终点(3,3)katt=30,ka*tt=20,j*att=40,krep=2,d0=1.5,l=0.1.如图3所示,使用T-APF 进行仿真时,由于目标点附近存在障碍物,引力随与目标点的接近而减小,斥力随与障碍物接近而增大,此消彼长之下,最终会在接近目标点的途中出现斥力大于等于引力的情况,因而在震荡后AGV 将无法到达目标点.而使用 I-APF 进行仿真时,由于在斥力势场中引入了d(X,Xg),在AGV 接近目标点时,斥力也会和引力一样同步减小,避免了斥力大于引力的情况发生.在引力方面,通过引入j*att补偿了因距离减小而变小的引力,进一步地确保了在路径规划的末段引力大于斥力,使 AGV 可以顺利到达目标点.
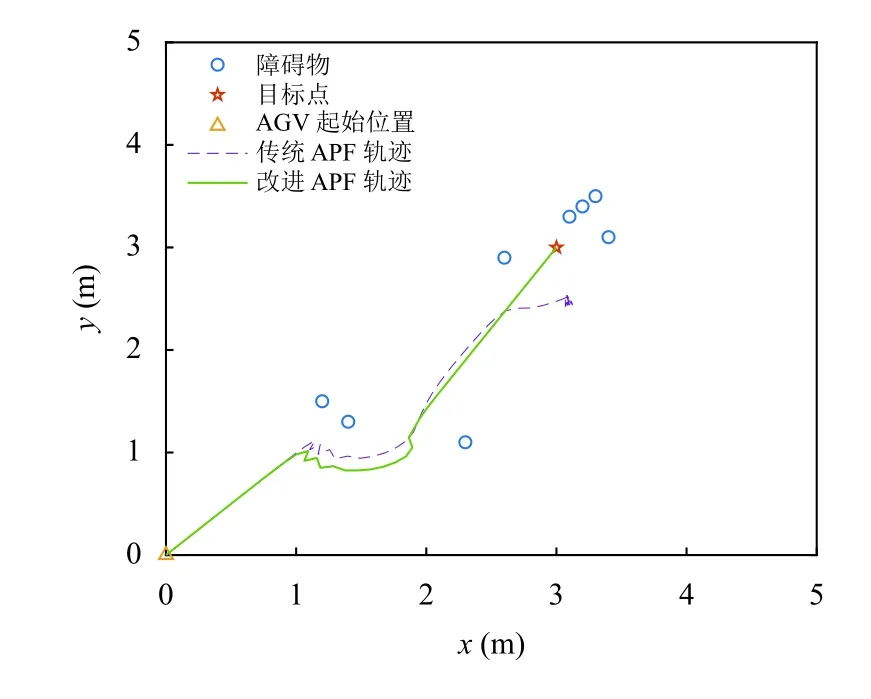
图3 目标点不可达缺陷环境中的路径规划
图4图5分别针对的是局部极小值中的半封闭式障碍缺陷与开放式障碍缺陷的路径规划仿真,其中对半封闭式障碍采用绕行逃脱策略,对开放式障碍采用直接穿越的逃脱策略.开放式障碍组仿真参数如下:起点(0,0) 终点(3,3)katt=10,k*att=8,j*att=20,krep=2,d0=1.5,l=0.2.半封闭式障碍组仿真参数如下:起点(0,0) 终点(6,6)katt=10,ka*tt=8,j*att=30,krep=2,d0=1.5,l=0.2.如图4图5,使用 T-APF 法进行路径规划时,由于局部受力平衡,使得 AGV 陷入陷阱区域无法逃脱.对此,我们在AGV 陷入局部极小值时在附近添加了临时的虚拟障碍物,帮助 AGV 脱离陷阱区域,随后再将临时障碍物去掉,使 AGV 顺利到达目标点.
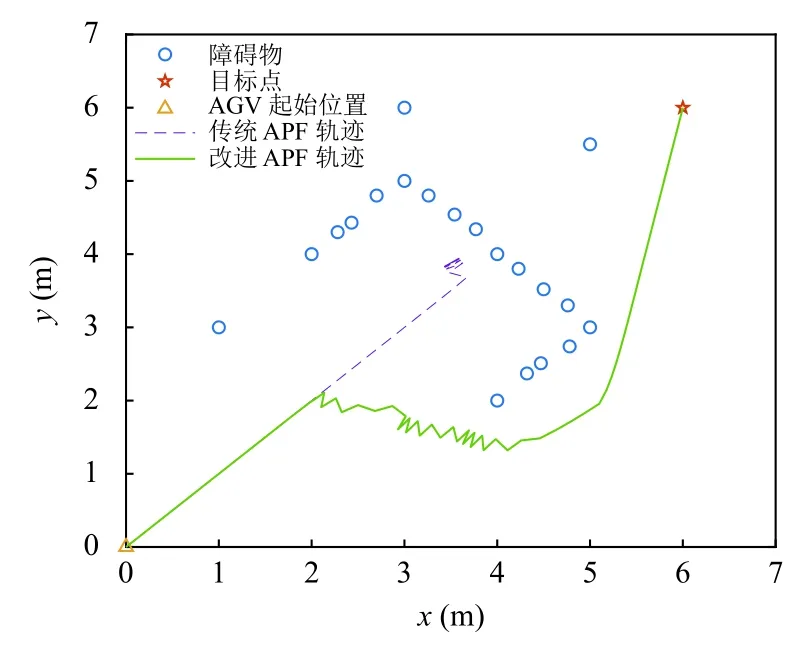
图4 局部极小值中半封闭式缺陷环境的路径规划

图5 局部极小值中开放式缺陷环境的路径规划
除对上述 T-APF 算法的典型缺陷环境进行路径规划仿真外,本文也对无陷阱环境进行了路径规划仿真.该组仿真参数如下:起点(0,0) 终点(10,8)katt=10,ka*tt=8,j*att=30,krep=3,d0=2,l=0.2.由图6可知,在不存在缺陷障碍的情况下,两种算法均可使 AGV 成功到达目标点.由表1数据可知,无论从路径长度还是程序运行时间上来看,I-APF 算法均优于T-APF 算法.

表1 对T-APF与I-APF的算法评估
图6 无陷阱环境中的路径规划
本节共进行了4 组实验,前3 组实验对前文中提到的3 种常见缺陷进行了陷阱障碍物仿真,并在其上分别使用 I-APF与T-APF 进行路径规划,实验结果显示 T-APF 无法成功规划完整路径,I-APF 可使 AGV 成功到达目标点.最后一组实验是在无陷阱障碍物情况下进行的,目的是为了比较在无陷阱情况下,两种算法的优劣情况,实验结果显示,二者均可使 AGV 成功到达目标点.但对路径长度与程序运行时间两个评价指标进行对比发现,I-APF 优于T-APF.
4 结语
为解决老旧仓库中人工势场算法易陷入陷阱的问题,本文提出了一种新型的改进人工势场算法(I-APF).并在仿真环境下对传统人工势场算法(T-APF)与改进人工势场算法进行了实验,结果表明改进人工势场算法优于传统人工势场算法.下一步研究中将计划使改进人工势场算法支持对动态障碍物的避障,使改进人工势场算法可以更好地适用于老旧仓库中 AGV的路径规划.
