基于ICEEMD-RAKSVD的地震弱信号去噪方法
2022-05-09朱剑兵
朱剑兵
(中国石化 胜利油田分公司物探研究院,东营 257022)
0 引言
众所周知,地震勘探由于噪音来源多,一些弱信号往往会淹没在噪音里,常规方法很难去识别弱信号中的构造、储层信息。为了有效识别弱信号,前人引入了很多方法,其中包括:基于非线性动力系统的混沌理论[1]、基于独立分量分析的盲源分离技术[2]、基于奇异值分解(SVD)的方法[3]、基于经验模式分解(EMD)[4]和基于高阶统计量[5]等识别技术。
Aharon[6]提出了KSVD算法;韩文功等[7]提出的SVD分解方法可以较好进行弱信号的识别和去噪。KSVD算法由于需要进行多次SVD分解的操作,因此,耗时过长, Rubinstein[8]在KSVD的基础上提出了AKSVD算法(Approximate KSVD),但是其效果比较差;Dumitrescud等[9]在KSVD基础上引入了正则化,得到RKSVD与RAKSVD(正则化近似KSVD)方法,并进行了对比,RAKSVD在效果几乎与KSVD一致的情况下,大大提高了效率。在模态分解去噪方面,Huang等[10]在1998年首次提出了经验模态分解理论(EMD)。然而EMD也并非完美,仍存有一定的缺陷性,诸如部分模态之间的混叠现象、端点效应以及筛分准则等;Wu等[11]引入了总体经验模态分解(EEMD),对EMD算法进行了的改进,但又出现了新的问题,恢复信号中仍含有一定程度的残余噪音成分,无法将其消除干净;Torres[12]对EEMD算法进行了改进,引入的完备总体经验模态分解(CEEMD)拥有高精度去噪的优势,但也不能盲目去除高频模态,其中还保存着很多有效信息;杨涛[13]结合KSVD和CEEMD的特点,利用KSVD对弱信号的识别优势及CEEMD的高效去噪,设计了一个基于KSVD的CEEMD去噪识别方法,去噪效果较好,但计算效率相对较低。笔者将改进的CEEMD(ICEEMD)与正则化近似KSVD(RAKSVD)有机结合起来,形成了基于ICEEMD-RAKVSD的去噪方法,该方法能够对地震弱信号有效识别,取得了较好的弱信号去噪效果,同时计算效率也得到了提升。
1 RAKSVD方法原理
由于KSVD中每次原子更新都要进行一次SVD分解,从而导致了计算效率较低。Rubinstein等[8]提出了一种近似KSVD算法(AKSVD),该算法能够明显提高计算效率,但由于引入了近似,SVD分解结果存在一定的误差,因而影响了分解效果。针对这一问题,Irofti等[14]提出了正则化近似KSVD(RAKSVD)算法,建立岭估计模型,解决稀疏分解中的病态问题,从而使SVD分解结果的误差得到很大程度上的控制,提高了稀疏分解效果。
1.1 KSVD字典
KSVD字典是学习型字典之一,具有更适合反映数据结构特点的优势,能获得较好的去噪效果。KSVD算法通过对初始化字典进行逐列更新,用来寻找一个最佳字典的过程,假定训练的信号为Y∈Rm×n,其中m为信号的行数,n为信号的列数,每列对应于一个训练样本。学习型字典模型可以描述为式(1)。
(1)
式中:D∈Rm×p为待学习字典,p为字典的列数;X∈Rp×n为稀疏表示系数;‖·‖0表示l0范数;‖·‖2表示l2范数;T为每列个数的最大值。
首先固定字典D,利用正交匹配追踪算法(OMP)对已知样本数据进行分解,获取初始稀疏分解系数矩阵。
字典更新实施步骤如下:
1)记当前更新的第k列字典原子为dk,X中使用到dk原子的索引集合为Ik。
2)计算残差:
(2)
式中:xj为x的第j列;Ek为去除dk外的残差。

(3)
式中:U表示左奇异矩阵;V表示右奇异矩阵;Λ是奇异值合集;r表示非零奇异值的数量;ui表示左奇异矩阵的第i行;σi表示第i个奇异值;νi表示右奇异矩阵的第i列。
4)原子和稀疏系数更新为:
xk=σ1ν1,dk=u1
(4)
1.2 近似KSVD
Rubinstein等[8]在KSVD的基础上提出了AKSVD算法,主要是在上述步骤3)中采用近似计算更新原子,AKSVD算法更新后的原子和相关系数分别为式(5)和式(6)。
(5)
(6)
1.3 正则化AKSVD
稀疏分解是一种不适定问题,而正则化方法能有效提高分解效果。正则化字典习模型可描述为式(7)。
(7)
式中,μ>0为正则化参数。同样的,记当前更新的字典原子为dk,X中使用到原子的索引集合为Ik,则公式(2)可以变为式(8)。
μ‖Xk,Ik‖2
(8)
由于相关系数里除了第k行外,都为固定项。
由公式(2)则可得到:
(9)
(10)
根据式(10),从KSVD算法的正则化[9]可以得出,正则化约束后的更新原子方法和原算法一致,而正则化参数是应用到了稀疏系数的更新,使系数变为1/(1+μ)倍,通过给稀疏系数一个权值,每次通过这个权值影响后续的原子更新,最终完成字典的更新。所以RAKSVD的原子和稀疏系数更新[14]为式(11)和式(12)。
(11)
(12)
1.4 效果对比
图1为KSVD、AKSVD、RAKSVD三种训练字典的误差对比图,其中训练集Y的稀疏度为5,字典维数为64*256,正则化参数μ为0.1,整个分解过程重复迭代120次,取平均值得到均方根误差RMSE(单位无量纲)随迭代次数的关系。

图1 误差对比图Fig.1 Error comparison
由图1可以看出,这三种KSVD训练字典在迭代20次后RMSE基本趋于稳定,其中AKSVD训练效果里相对最差,RAKSVD与KSVD训练效果接近,经前人研究AKSVD相比于KSVD效率提高,故而RAKSVD在提高效率的同时,也能达到较好的分解效果。
2 ICEEMD方法原理
首先,EEMD算法在解决EMD存在的模态混叠、端点效应等缺陷的同时,也导致了分解的IMF分量存在噪音残余,而CEEMD通过在不同阶段加入不同高斯白噪音进行调整,比例大小根据待分解信号自适应计算得到,同时每个符合条件的模态分量对应的计算残差值是固定唯一的。不仅解决了模态混叠问题,同时使原始信号复原的精度变得更高。
按照Torres[12]所设计的CEEMD方法步骤对信号做处理,原始信号中各个频率成分的信号,基本上都能够得到较好的分解,但该算法仍存在可能出现虚假模态的问题,同时由于高斯白噪声的加入,分解的模态中会混入一定程度的噪声。为了解决上述问题,改进的CEEMD(Improved CEEMD,ICEEMD)算法重新定义了各个模态局部均值的求取。
假设:Ej(·)为CEEEMD分解得到的第j阶模态,s(t)为原始地震信号,ωi为加入的第i个高斯白噪声,白噪声加入的比例为εk。则改进后的ICEEMD实现步骤如下:
1)将不同正负成对的白噪声分别加入原始信号中,合成得到T个新信号(T为偶数),计算集合平均得到IMF1(t)。
(13)
2)令r0(t)=s(t),对k=1、…、K,计算k阶残差rk(t)为式(14)。
rk(t)=rk-1(t)-IMFk(t)
(14)
3)对k阶残差添加不同比例系数的白噪声:rk(t)+εkEk+1(ωi(t)),经EMD分解得到IMF1(t),计算总体平均并将其作为IMF(k+1)(t)。
(15)
4)重复上述步骤,直到达到迭代条件,得到最终的残差E(t)为式(16)。
(16)
CEEMD去噪往往是直接去除IMF1或IMF1和IMF2分量,但其中往往包含有效信息,所以,虽能有效去除高频噪音,但对于弱信号去噪的问题,容易丢掉真正的有效信号,使同相轴不连续。
相比于CEEMD算法,改进后的CEEMD(ICEEMD)算法可以加入更少的白噪声个数,就能使信号得到很好的模态分离,同时,在相同参数的条件下,ICEEMD分解的效果更好,计算效率更高。
3 去噪方法
KSVD字典稀疏去噪方法是属于对压缩感知原理的改进算法,通过训练样本求取冗余字典,较好地刻画出信号特征,从而更加精确地重构原信号,实现噪声去除和保留有效信号的目标。KSVD字典虽然能将噪音基本压制和消除,但在信号的波峰波谷处仍会存有残留一些毛刺。ICEEMD算法不需要提前设置基函数,它是以信号本身的特点作为基础来自动分解和重构信号,打破了测不准原理的限制,达到了高精度识别弱信号的能力。
具体实现步骤为:
1)利用ICEEMD算法对地震信号进行分解得到固有模态函数集,根据分解效果,将其划分为噪声主导模态、信号主导模态和过渡模态。
2)对于噪声主导模态,则直接舍弃。
3)对于信号主导模态,将其与原始信号叠加,形成主导信号集,通过RAKSVD方法进行主导信号集的分解和去噪。
4)对于过渡模态,先将其叠加,再进行ICEEMD分解;舍弃噪音模态后,与原始信号叠加,重构过渡信号集,通过RAKSVD方法进行过渡信号集的分解和去噪。
5)将步骤3)和步骤4)中的两个分解结果重构并平均,得到最终的去噪结果。
4 模型测试
含有弱信号模型如图2(a)所示,模型共有25道,每道300个采样点,Ricker子波主频25 Hz。在200 ms处有一弱信号。图2(b)为含噪模型,加入噪声后的峰值信噪比(PSNR)为1.2,图2中强轴能够明显看到,但弱轴在噪声的埋没中已经不明显了。对图2(b)分别采用五种算法进行去噪处理,得到的结果如图3所示,图4为模型的15道的单道方法去噪结果,表1是各方法的去噪效果与时间对比。

表1 五种方法针对模型数据的去噪效果对比Tab.1 Comparison of the effects of five methods for denoising the model data

图3 五种方法针对模型数据的去噪结果Fig.3 The result of five methods for denoising the model data(a)KSVD去噪;(b)RAKSVD去噪;(c)CEEMD去噪;(d)CEEMD-KSVD去噪;(e)ICEEMD-RAKSVD去噪
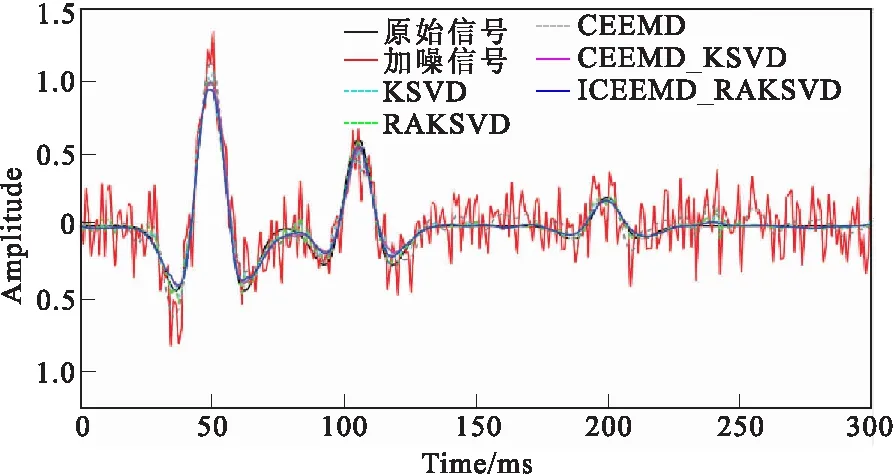
图4 单道去噪方法结果对比Fig.4 Comparison of single channel denoising results
从图3、图4和表1可以看到,如果CEEMD单独使用,则对弱信号的识别和去噪效果最差;KSVD和RAKSVD对模型中弱信号的识别和去噪效果较好,说明该类方法相比于CEEMD,对弱信号识别有着独特的优势,但仍有一些毛刺的残留,在实际应用中,当地下介质不均匀或由薄互层形成复波时,其缺点会被放大;CEEMD-KSVD和ICEEMD-RAKSVD是将模态分解和字典训练联合在一起进行去噪,将模态分解的信号分解为主导模态和过渡模态,利用KSVD和RAKSVD对弱信号识别的优势,最终使含噪弱信号中的噪声得到了较好的压制,且保留了有效弱信号,ICEEMD-RAKSVD方法能够达到最好的去噪效果。由表1可以看到,由于CEEMD算法需要多次迭代,每次迭代需要加入大量成对的高斯白噪声,因此,其计算效率低。KSVD和RAKSVD计算时间少,RAKSVD较KSVD效率提高了60%。由于CEEMD的引入,CEEMD-KSVD和ICEEMD-RAKSVD算法明显增加了计算时间,ICEEMD-RAKSVD 相对于CEEMD-KSVD效率提高6%,对于简单的稀疏模型,CEEMD的计算时间占主导,因此,计算效率提升幅度不是很大。
5 实际资料处理
针对实际资料,对本方法的去噪效果进行了进一步测试。图5(a)为原始局部叠前地震道集,图5中随机噪声十分发育,信噪比非常低,其中弱同相轴不清晰、不连续。上述五种方法的去噪结果如图5(b)~图5(f)所示,图6为单道去噪结果对比展示,图7为去噪后残差剖面效果对比,去噪效果与时间对比见表2。

表2 五种方法针对实际资料的去噪效果对比Tab.2 Comparison of the effects of five methods for denoising the actual data
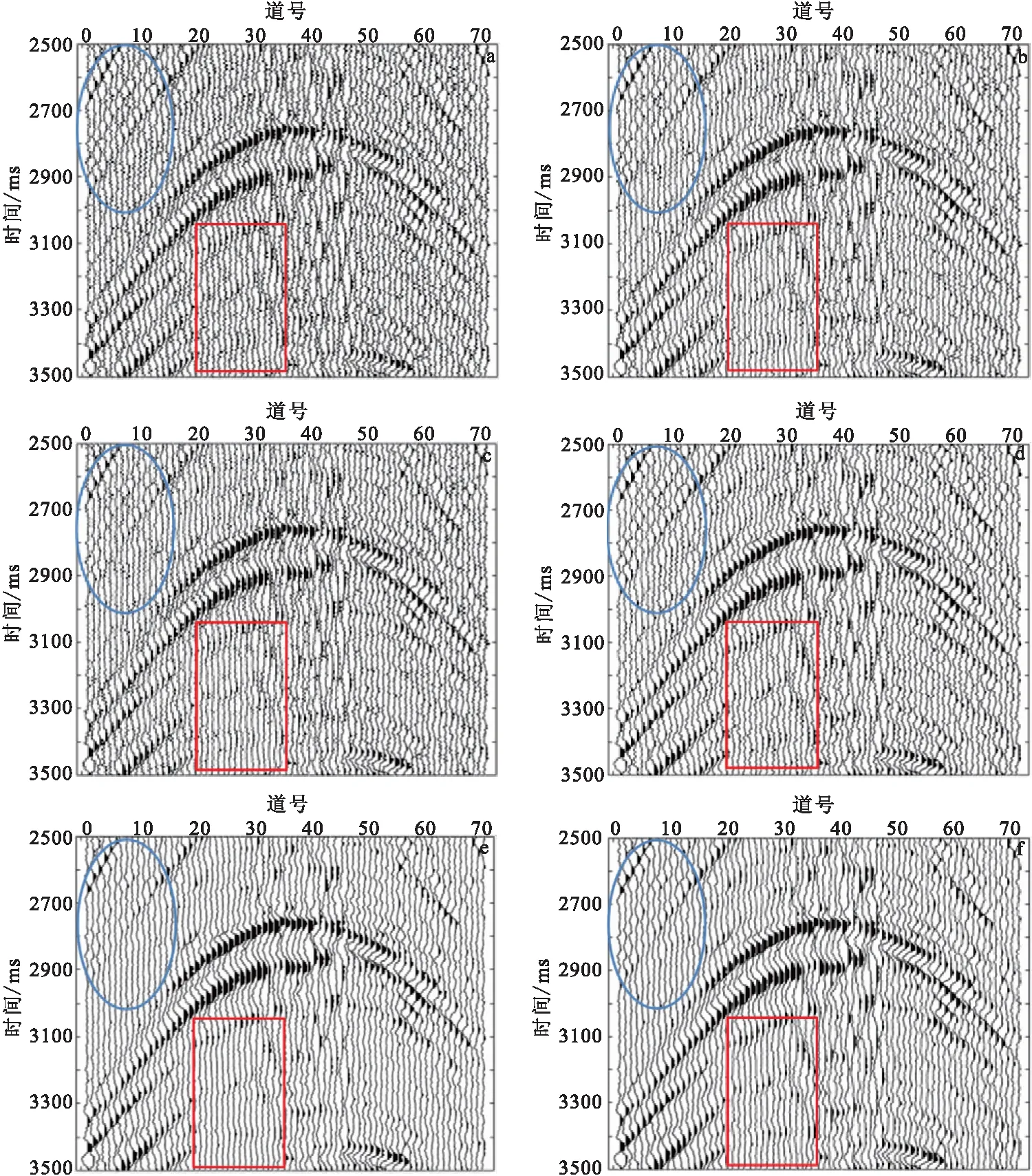
图5 五种方法针对实际资料的去噪结果Fig.5 The result of five methods for denoising the actual data(a)原始叠前地震道集;(b)KSVD去噪;(c)RAKSVD去噪;(d)CEEMD去噪;(e)CEEMD-KSVD去噪;(f)ICEEMD-RAKSVD去噪
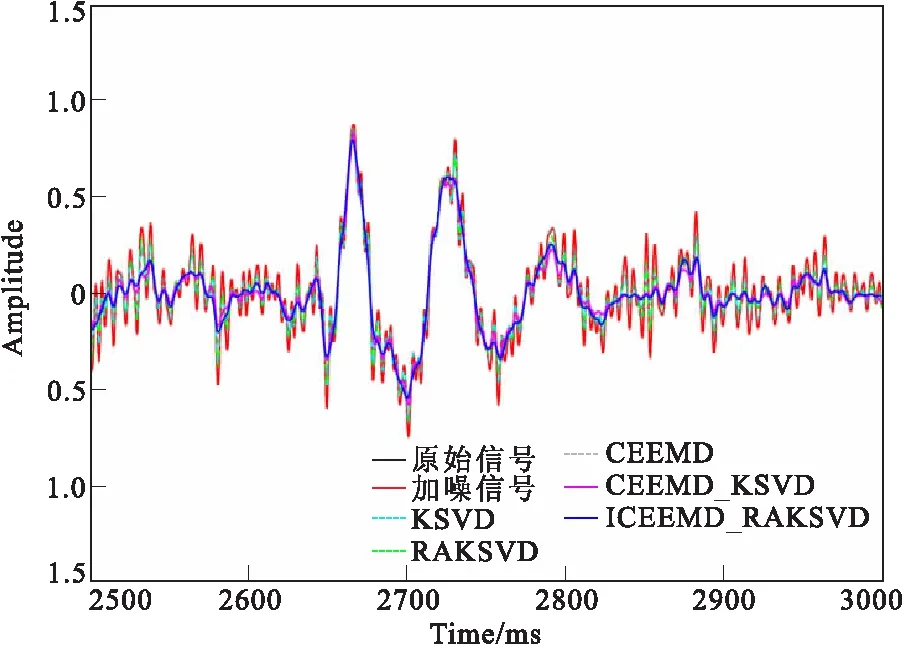
图6 单道去噪方法结果对比Fig.6 Comparison of single channel denoising results
从图5和表2可以看出,对于弱地震信号,实际资料的处理结果与模型测试得到的结论相一致:CEEMD去噪效果较差,去噪后PSNR最低,将部分弱同相轴的有效信号充当噪音去除,弱同相轴损失严重;RAKSVD与KSVD稀疏去噪较明显,但仍存留了许多噪音。CEEMD-KSVD和ICEEMD-RAKSVD算法都能够很好地压制噪声,红方框标记可以看出ICEEMD-RAKSVD有效弱信号得以保留。从图5(a)可以更为清晰看出五种方法对比,而图6可以得出 CEEMD-KSVD和ICEEMD-RAKSVD算法去噪效果几乎一致,能有效去除噪音,图7蓝圆圈中可以看出,CEEMD-KSVD去除的残余还仍然保留些有效信号,而本文方法去除的噪音没有保留有效信号,去噪效果更好,同时由于实际地震数据非常复杂,训练字典的时间大大增加,从表2可以看出,RAKSVD较KSVD计算时间缩短了65%,下降幅度较为明显,ICEEMD-RAKSVD相对于CEEMD-KSVD时间缩短了40%。对实际地震资料的去噪处理,更能突显本文方法在提高计算效率方面的优势。

图7 去噪后残差剖面效果对比Fig.7 Comparison of residual profile effects after denoising(a)CEEMD_KSVD;(b)ICEEMD_RAKSVD
6 总结
由于弱地震信息往往受噪音影响更大,通过去噪能更好地识别弱信号。CEEMD去噪方法直接舍弃高频模态,容易造成高频中有效信息的丢失,而完整地保留了其他含有噪音模态,KSVD去噪方法和RAKSVD去噪方法,对于弱信号的识别效果较好,但去噪后残留毛刺,其中RAKSVD计算效率得到明显提高,CEEMD-KSVD去噪方法能达到较好的去噪效果,但计算效率相对较低,这里指出的基于ICEEMD-RAKSVD去噪方法能在保证较好的去噪效果情况下,还能有效提升了计算效率,在实际地震处理中提升效率尤为重要,该方法具有一定的应用价值。