深空探测用塑料闪烁体阵列式缪子探测器电子学采集系统设计
2022-05-09窦文强李志伟程雅苹李景太刘振宇
窦文强,韩 然,刘 滨,李志伟,程雅苹,冒 鑫,李景太,刘振宇
(1. 华北电力大学 核科学与工程学院,北京 102206; 2. 北京卫星环境工程研究所,北京 100094)
0 引言
获取地外星体浅表和内部的结构、物质成分及其物理性质是深空探测的重要目标之一。例如,2018 年5 月5 日发射升空的“洞察号”(InSight)火星探测器的主要任务是进行基于地震调查、大地测量与热传导的火星内部结构和物理性质探测。宇宙线缪子成像技术作为一种对物质密度敏感的被动源探测技术,有望成为火星和小行星浅表和内部物质结构成分研究的新兴探测手段。
自1970 年起,宇宙线缪子成像方法就被提出并用于测量地下隧道上覆盖的岩层厚度和对金字塔内部构造进行辐射成像研究。2017 年,Morishima 等利用缪子成像方法对埃及胡夫金字塔内部结构进行成像探测,发现了在墓室上方存在未知暗室的证据。近年来,宇宙线缪子成像技术开始用于火山岩浆通道、隧道、矿体等小尺度精细密度结构的探测和成像,实现了火山锥内部密度结构的成像以及火山岩浆运移和活动断层的动态监测,显示出该项技术高分辨率、高精度及无须原位测量的优势,为地球浅层密度结构探测提供了一种极具效能的新方法。
缪子成像方法应用于太阳系内地外星体浅表和内部结构及其物理性质研究,在国际上仍然处于概念阶段。例如,Kedar 等提出一种紧凑型的缪子望远镜对火星进行成像,他们估计火星表面大气的缪子通量大于地球海平面的缪子通量,可为火星表面地质结构的缪子成像提供足够的缪子强度;但是火星大气比较稀薄,因此也会有原初宇宙线和其他次级粒子带来的较强本底信号。另外,在进行小行星内部结构探测时,须将未经过小行星、从反方向而来的缪子信号予以筛除,才能保证探测的精准度。随着探测技术的进步和对缪子散射及强度衰减规律的深入理解,利用缪子成像方法进行空间探测将逐渐可行。
常见的缪子探测器有气体探测器、核乳胶探测器和闪烁体探测器。气体探测器的气体系统相对复杂,很难在变化的温度和气压环境下保持探测器性能的长期稳定;核乳胶探测器的成像系统是非实时的,只能在一段时间内对入射缪子的累积进行测量,且核乳胶属于消耗品要不断更换,不适应长时间测量。相对于以上2 种缪子探测器,塑料闪烁体探测器性能稳定,结构设计灵活,信号读出迅速,在缪子探测以及深空探测领域具有天然的优势。
本研究团队前期的缪子探测器研制以及缪子成像初步实践应用工作表明,缪子成像不仅可以实现地球上火山、隧道等多类型物体的高分辨探测和成像,还有望与其他已有方法联合应用到火星、小行星及彗星等的内部结构和物质成分探测领域,成为极具潜力的空间探测新技术。
本文基于闪烁耦合硅光电倍增管(SiPM)探测技术,设计一套可应用于不同环境的缪子成像探测器原型。对其前端读出电子学系统(FEE)及后端多通道FPGA 数据采集系统进行设计;并搭建探测器测试平台,对探测器采集数据进行分析,验证探测器电子学采集系统设计的合理性。
1 探测器系统设计
1.1 探测器阵列结构
缪子探测器是用来探测缪子事件以及缪子能量、运动方向的仪器。本文利用塑料闪烁体和SiPM设计适用于缪子成像的缪子探测器,其工作原理是:当宇宙线缪子穿透闪烁体时,闪烁体受激发出荧光;光信号经过直射和反射到达闪烁体两端的SiPM,由SiPM 转化为电信号输出。本设计中,SiPM选用的是爱尔兰SensL 公司的MICOROFC-30035-SMT 系列的一款3×3 mm SiPM;塑料闪烁体选用的是北京昊唐兴核技术有限公司生产的有机闪烁体。塑料闪烁体探测器阵列由两层塑料闪烁体阵列板(PAB)构成,也可根据需求将PAB 的层数外扩;每层PAB 由上下两层正交的闪烁体构成,每层由10 组闪烁体(每5 根塑料闪烁体为1 组)组成;每组闪烁体的两端都配置SiPM 信号读出板,读出板与闪烁体通过光学胶耦合。塑料闪烁体尺寸为100 cm×2 cm×1 cm,外贴0.02 mm 厚反光铝箔。每层PAB 有独立的数据读出系统,一层PAB 共计(10×5×2)×2=200 路模拟信号输出,信号输出通道分布于探测器的四周,故PAB 板4 个侧面的信号输出通道数相同。为实现信号传输的一致性,设计时采用对称读出方式,即将8 块相同的FEE 板(FEE1~FEE8)两两一组分别置于PAB 板的4 个侧面,每块FEE 板含25 路探测器信号接口。考虑到塑料闪烁体的光衰减,采用双端做“或”的方式读出,可以弥补闪烁体在探测效率上的不足。图1 为塑料闪烁体探测器阵列结构示意。
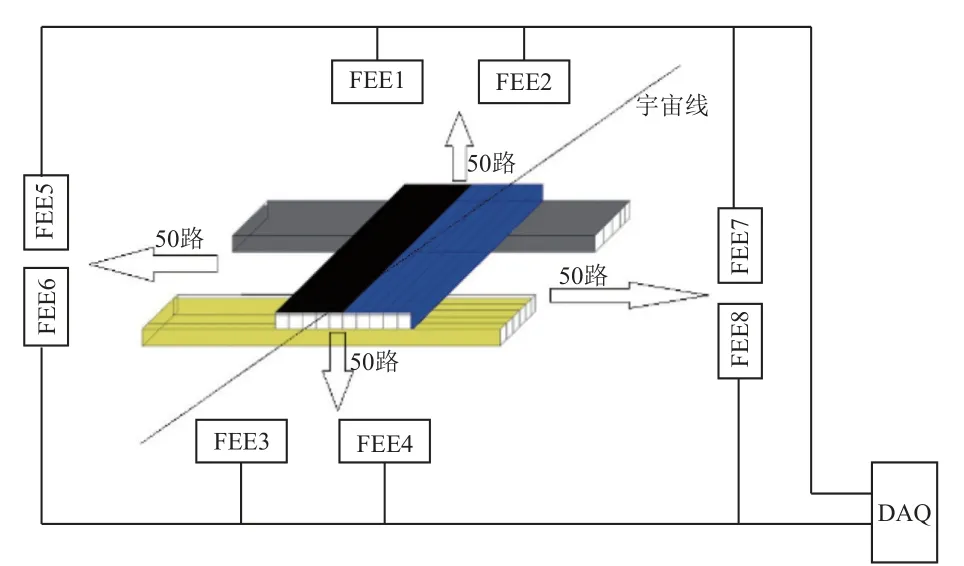
图1 塑料闪烁体探测器阵列结构示意Fig. 1 Structure of the plastic scintillator detector array
1.2 前端读出电子学系统
如图2(a)所示,由SiPM 底板1 引脚输出的信号是电流信号,通过电阻R3 接地,可将电流信号转化为电压信号;电压信号经过同相放大器放大,放大器的带宽为350 MHz、压摆率为425 V/μs,可以保证SiPM 的输出信号不失真。如图2(b)所示,将放大器的输出信号作为阈值甄别器的输入信号;阈值甄别器的比较电压为30 mV,大于30 mV 的信号经阈值甄别器输出为3.3 V 的电平信号;不同幅值的信号经过阈值甄别器所形成的电平信号宽度不同,输入信号幅值越大,电平信号的宽度越宽。
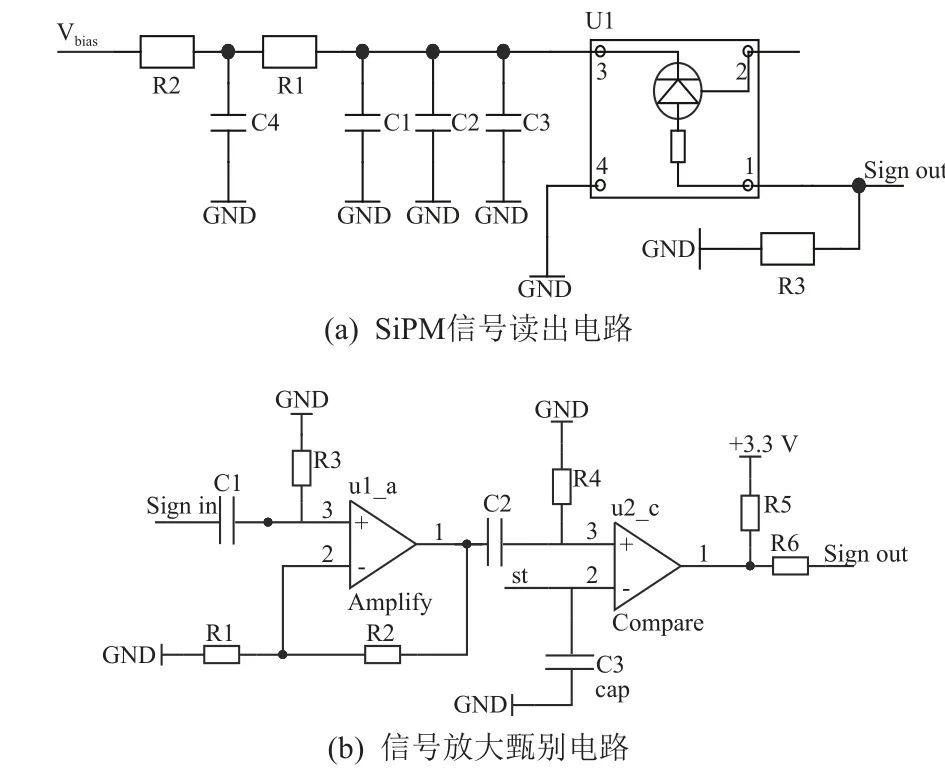
图2 探测器前端读出电路Fig. 2 Circuit of the detector’s FEE
放大电路为典型的同相比例放大,放大倍数由R2 和R1 的阻值比决定,C1 为隔直电容,将信号中的直流成分隔离出去。图3(a)为SiPM 产生的信号经由放大器输出的信号,信号周期约为200 ns,上升沿约为30 ns,基线噪声约为10 mV。图3(b)为甄别器输出的3.3 V 的TTL 电平信号。
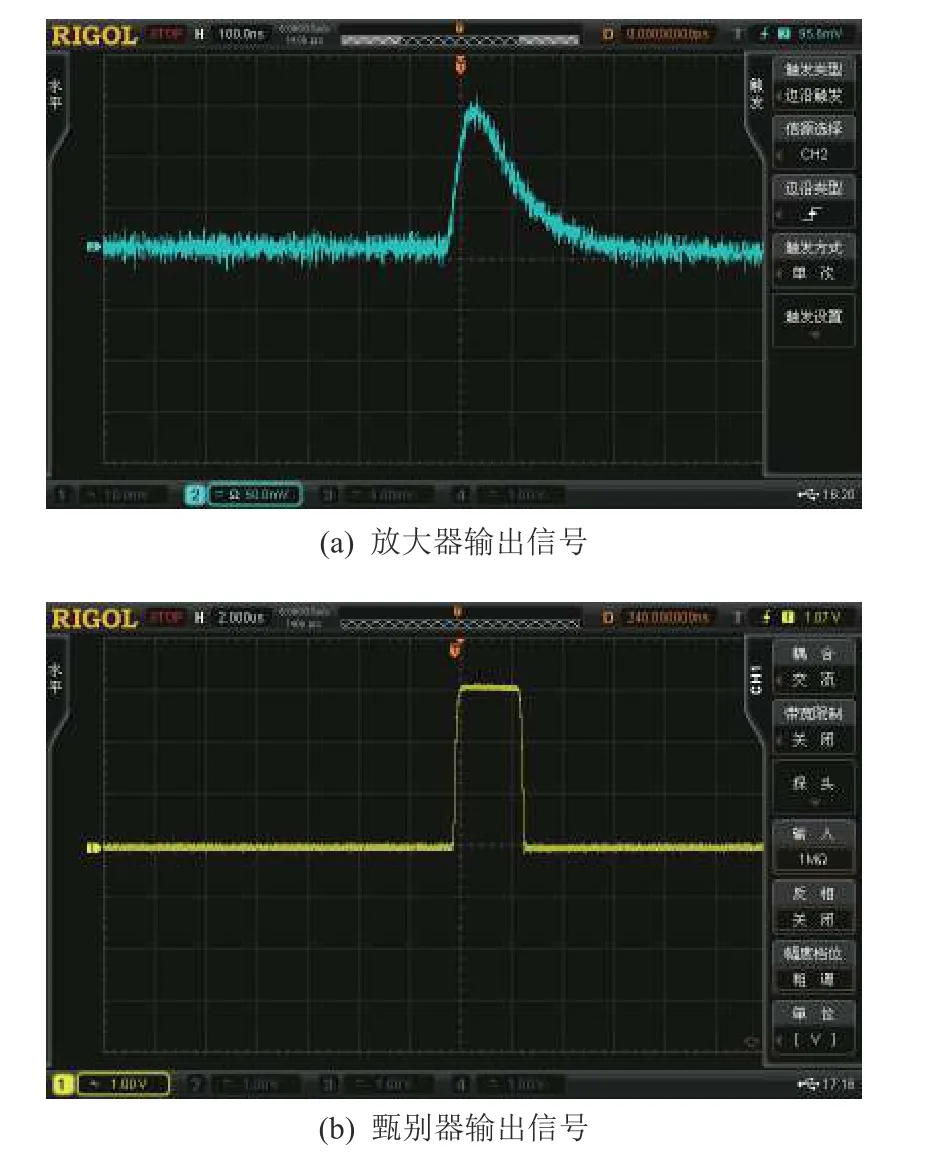
图3 探测器前端读出电路输出信号波形Fig. 3 Output signal waveform from the detector’s FEE
如图4 所示,宇宙线缪子探测信号经光电转化以及放大、甄别后,由模拟量转化为数字量传递给FPGA;FPGA 将得到的通道信息经过采集、处理、筛选、打包后,通过网口传递给上位机。其中,温度补偿电压供电模块将当前环境温度传递给FPGA,FPGA 再将对应的补偿电压值传递给温度补偿电压供电模块,以实现SiPM 偏压随环境温度变化的自动调节。
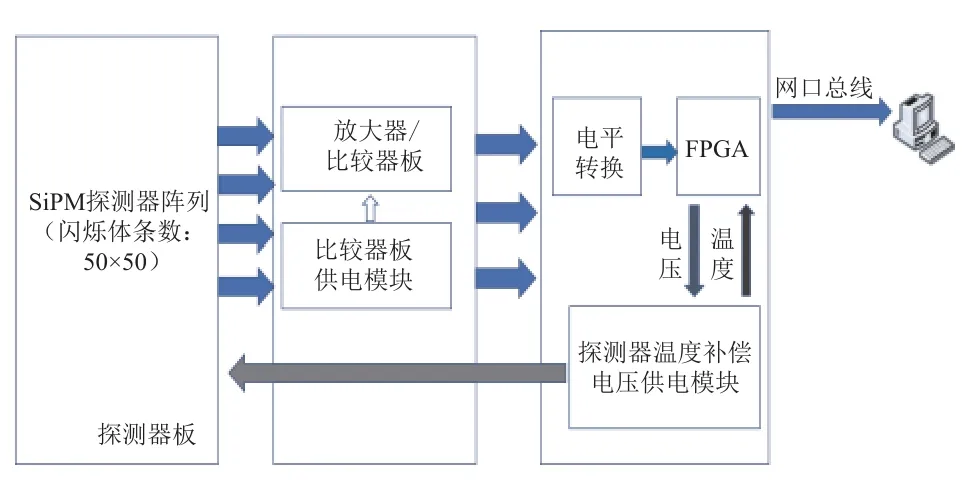
图4 探测器前端读出电子学控制逻辑系统Fig. 4 Control logic system of the detector’s FEE
1.3 后端多通道FPGA 数据采集系统
如图5 所示,FPGA 通过“推火车”的方式实现对数据的缓存:在100 MHz 时钟周期的上升沿采集200 路信号通道的数据,在下一个时钟周期上升沿来临的时刻,将前一个时钟周期的数据向左移动200 bit,将下一时钟周期的数据放在前200 bit 上。本文将探测器阵列的上层闪烁体条定义为X 层,下层闪烁条定义为Y 层,每层闪烁体有100 路输出。探测器不同通道的信息储存在200 bit 不同的位上,X 层信号输出在寄存器上对应前100 bit,Y 层信号输出对应后100 bit,通过设置FPGA 中该寄存器的长度,就可以对个周期的数据进行存储。将这种存储方式应用于闪烁体阵列式缪子探测器的优点有二:其一,可以对缪子信号进行逻辑上的符合筛选。SiPM 信号有很大的暗噪声,因此仅一层闪烁体有信号不足以判断其为缪子信号,需要通过双层筛选,仅当X 层与Y 层闪烁体同时有信号时,FPGA 才判定其为缪子信号并输出。其二,可以定义每组信号的采集周期。缪子击中探测器不同位置传递到FPGA 会有不同的延迟,即不同通道的信号延迟不同,因此对于在100 MHz 时钟周期下、每10 ns对200 路信号通道进行1 次采集,则同一个信号可能没有在一个时钟周期采集到;通过定义寄存器的长度即可改变FPGA 的采样周期,考虑到信号的延迟,本次探测器的采样周期设计为100 ns(1 mm每分钟采集10 000 次);在FPGA 中定义一个10×200 bit的寄存器,可以将采集到的10 个时钟周期的数据相同位逻辑取“或”,得到一个200 bit的数据。该寄存器是一维数组,相对于多维数组储存,这种储存方式不会出现储存混乱的状况,可通过定义寄存器的长度来控制时钟窗口的长度,通过对数组不同位的操作来实现不同通道的逻辑运算。
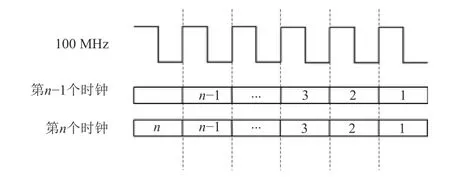
图5 FPGA 数据缓存时序图Fig. 5 Timing diagram of FPGA data cache
2 探测器性能测试
2.1 计数率随偏电压变化
SiPM 由多个带有猝灭电阻的单光子雪崩二极管(SPAD)并联组成,设计在Geiger 模式下运行;在该模式下,阴极必须相对于阳极在击穿电压之上达到正偏置。SiPM 的击穿电压是SPAD 在Geiger模式工作时的最小反向偏置电压;SiPM 的偏电压包括击穿电压和过电压两部分,整体通常比击穿电压高出10%~25%。为了得到SiPM 的最佳工作电压,在实验室条件下,令探测器在不同偏电压下对天然缪子进行采集,得到如图6 所示的探测器计数率随偏电压变化的关系。由图可以看出,探测器计数率随着偏电压的升高而增大,但变化逐渐趋于平缓。
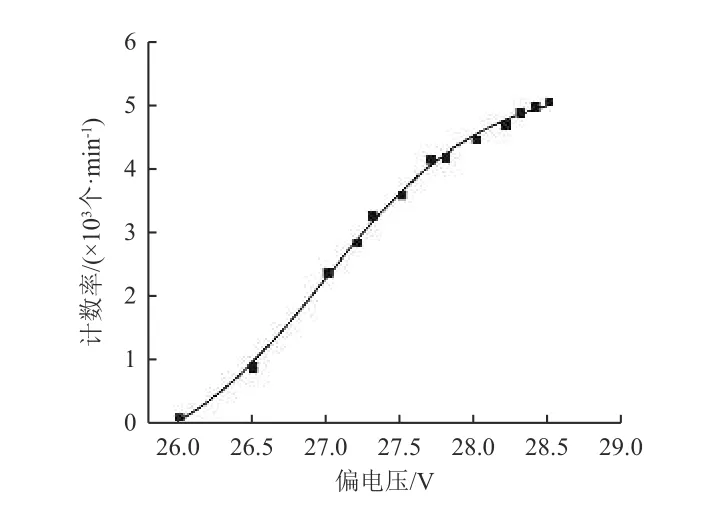
图6 探测器计数率随偏电压的变化Fig. 6 Variations of detector counting rate with bias voltage
2.2 相对标准偏差随偏电压变化
探测器的计数率是衡量探测器探测效率的指标,而均匀性是衡量探测器探测性能的重要指标。均匀性通过相对标准偏差(RSD)来体现,以X 层板为例,其相对标准偏差为
上述实验均是在室温(25 ℃)下进行的,根据探测器计数率和相对标准偏差随偏电压的变化可知,在室温条件下,SiPM 偏电压为28 V 时,探测器的探测效率和性能指标均良好,因此可认为SiPM 在室温下的最佳工作电压为28 V。
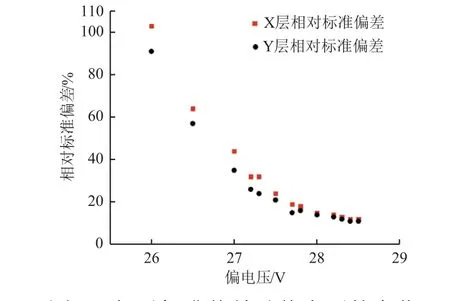
图7 相对标准偏差随偏电压的变化Fig. 7 Variations of relative standard deviation with bias voltage
2.3 缪子径迹数随天顶角变化
通过以上实验确定探测器的最佳工作电压后,在实验室搭建含两层塑料闪烁体阵列板的缪子探测器,如图8 所示,探测器水平放置,两层阵列板的间隔为80 cm,阵列板的外形尺寸为100 cm×100 cm。

图8 两层塑料闪烁体阵列板缪子探测器Fig. 8 Muon detector with two layers of PAB
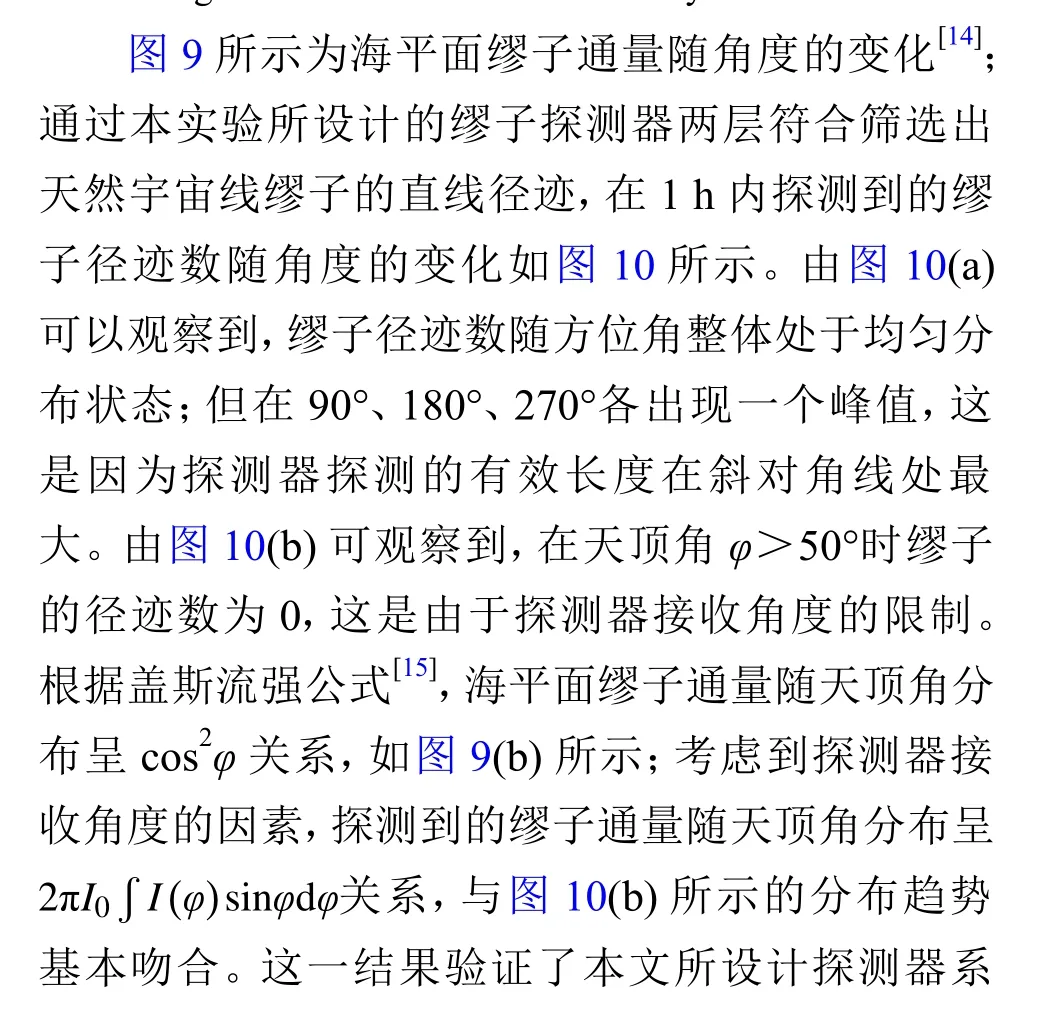

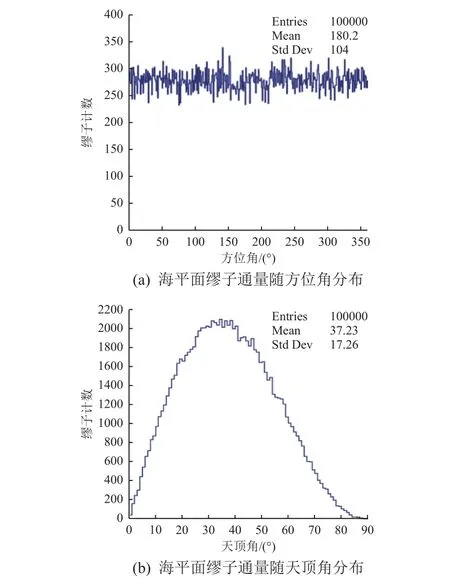
图9 海平面缪子通量随角度的变化Fig. 9 Variations of muons’ flux at sea level with angle
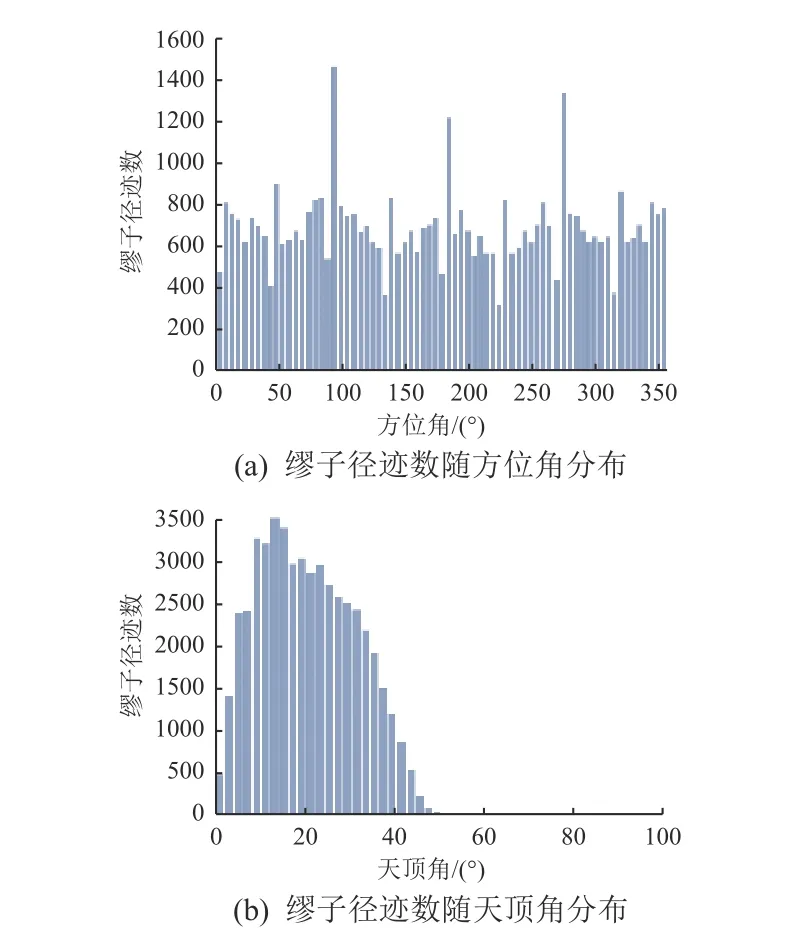
图10 缪子径迹数随角度的分布Fig. 10 Angle distributions of cosmic-ray muons’ track number
3 结束语
本文介绍了可应用于深空探测的塑料闪烁体阵列式缪子探测器的电子学采集系统设计,包括闪烁体探测器阵列、前端读出电子学系统和后端多通道FPGA 数据采集系统设计;搭建实验测试系统,对200 路塑料闪烁体阵列探测器的计数率和均匀性进行测试,得出探测器在室温条件下的最佳工作电压为28 V;最后利用该探测器采集系统在地面对天然缪子进行采集,得到的缪子数据符合理论预期,验证了探测器设计的正确、可行。同时,本次探测器设计具有很好的兼容性,可兼容小型可拼接塑料闪烁体探测器,相关工作为将来将缪子成像技术应用到深空探测领域提供了技术储备。
近些年来,世界各研究机构先后开展了缪子成像技术研究,研制完成不同类型的实验原型,并尝试应用于火山、隧道、高炉、大型建筑物及核反应堆检测等任务中。塑料闪烁体探测器具备稳定性强,几乎不受温度、辐射等外部条件的影响,结构设计灵活等特点,可以应对各种复杂的探测环境,从商业化和工业使用的角度来看,具有很大市场潜力。
