无人机传动轴故障诊断分析与排除方法
2022-05-08李海超
李海超
(西安爱生技术集团有限公司,陕西 西安 710065)
引言
无人机传动轴的作用是为无人机飞行传动能量,而无人机传动轴的故障产生的原因主要有两种情况,第一种情况是无人机传动轴在制造和安装时存在缺陷,即无人机传动轴在制造生产时其质量就不达标,尺寸、外形可能存在尺寸误差,但是由于机械制造技术工艺比较成熟,大部分无人机传动轴制造都能达到质量标准,因此这种情况基本不存在;第二种情况是因为长时间的运行,无人机传动轴受到外界因素的影响而出现断裂、螺栓脱落、变形等故障,这也是目前无人机传动轴故障发生的主要原因[1]。当无人机传动轴发生故障时,会对无人机飞行情况造成一定的影响,容易导致飞行速度减慢、动力不足、停飞等情况发生,因此对无人机传动轴故障诊断分析与排除是非常有必要的。但是现有的方法在应用过程中诊断精度较低,不能够满足无人机传动轴故障诊断分析与排除的精度需求,为此对无人机传动轴故障诊断分析与排除方法展开研究。
1 无人机传动轴故障诊断分析与排除方法设计
1.1 无人机传动轴故障数据采集
本文采用AIDD58D74A 型号的转速无线传感器对无人机传动轴故障数据进行采集,因为无人机传动轴故障发生时其最直观的故障特征区别就在于无人机传动轴的转速。传动轴主要包括外圈故障、内圈故障和传动体故障,将转速无线传感器安装在无人机传动轴的轴承内侧,将其电源线路与无人机电机串联在一起,当无人机电机驱动传动轴时也将自动开启转速无线传感器开关[2]。根据实际情况设置传感器信号采集频率、周期、精度和范围等技术参数,对无人机传动轴转动数据信号进行采集,并将采集到的数据通过网络接口传输到计算机上,对数据进行存储。
1.2 无人机传动轴故障诊断分析
上文提到无人机传动轴主要故障特征为传动轴转速发生改变,因此以该参数为无人机传动轴故障诊断变量,利用差值分析函数对无人机传动轴转速误差进行计算,其计算公式如下:

式(1)中:v 表示无人机传动轴转速误差;t 表示无人机传动轴运行时间;s 表示无故障情况下无人机传动轴标准转速;st表示t 时刻无人机传动轴转速[3]。利用上述公式计算出无人机传动轴转速误差,根据实际情况设定一个无人机传动轴故障诊断阈值,该阈值为无人机传动轴最大允许误差值,将差值分析函数计算值与阈值对比,如果大于阈值则判断此时无人机传动轴存在故障;如果小于阈值则判断此时无人机传动轴运行正常,以此完成无人机传动轴故障诊断分析。
1.3 无人机传动轴故障诊断排除
当判断到无人机传动轴存在故障时,利用特征差别法对无人机传动轴故障进行排除,确定无人机传动轴故障类型以及故障位置。上文分析到无人机传动轴故障主要分为内圈故障、外圈故障和传动体故障三种,这三种故障发生时其转速具有不同表现特征,根据无人机传动轴历史运行数据,获取到三种故障发生时传动轴转速特征,利用以下公式对故障进行诊断排除。

式(2)中,s*表示无人机传动轴故障时转动频率[4]。通常情况下,无人机传动轴转动频率不会在同一飞行过程中始终保持一致。因此以85%为标准,将无人机传动轴转动数据带入到上述公式中,已知某种故障转动轴转动频率s*,如果公式(2)成立则判定存在的故障为该故障[5]。如果上述公式不成立,则排除该故障,带入下一种故障转动轴转动频率参数,逐一排除,从而确定无人机传动轴故障类型和故障位置,进而完成了无人机传动轴故障诊断分析与排除。
2 实验论证分析
实验以某无人机传动轴为实验对象,该无人机传动轴型号为3654ADS-ASD4,滚动体直径大小为7.5 mm,接触角为1.25°,传动体12 个,传动节径大小为45.5 mm,实验利用此次设计方法与传统方法对该无人机传动轴进行故障诊断分析与排除。实验利用电火花在该无人机传动轴的外圈、内圈、传动体上分别加工出直径为0.364 5 mm、0.482 6 mm、0.941 4 mm的凹槽来模拟出传动轴故障。将无线传感器的采集频率设定为13.45 Hz,采集范围设定为50~150 mm,采集周期设定为1.5 ns。利用无线传感器分别在外圈故障、内圈故障、传动体故障以及正常四种运行模式下,采集到无人机传动轴转速为150 0 r/min、170 0 r/min、190 0 r/min、210 0 r/min、230 0 r/min 时的数据,如表1 所示。
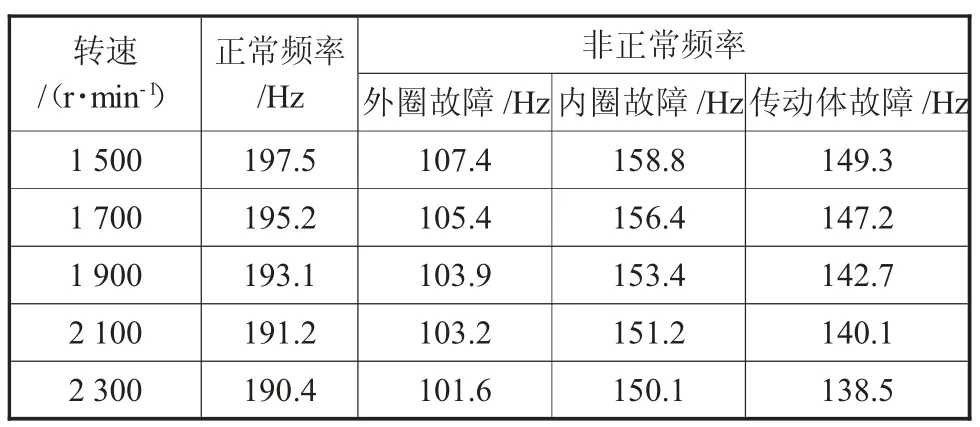
表1 无人机传动轴转动频率数据
以表1 无人机传动轴转动频率数据为基础,采用本文方法与传统方法,分别针对不同转速下的无人机传动轴转动频率来判断传动轴故障位置,以此来对比不同方法的诊断效果,如表2 所示。
从表2 中数据可以看出,本文设计方法对于无人机传动轴故障数据的分析较为准确,与表1 实际故障判断结果一致,说明本文设计方法的诊断效果较好,在5 种不同转速下无人机传动轴故障的诊断中,诊断精度为100%;而传统方法在5 种不同转速下无人机传动轴故障的诊断中,在无人机传动轴转速为1 700 r/min 与1 900 r/min 情况下出现了诊断错误,诊断精度为60%。为了避免实验结果出现随机性,因此再一次进行相同的实验,实验结果如表3所示。
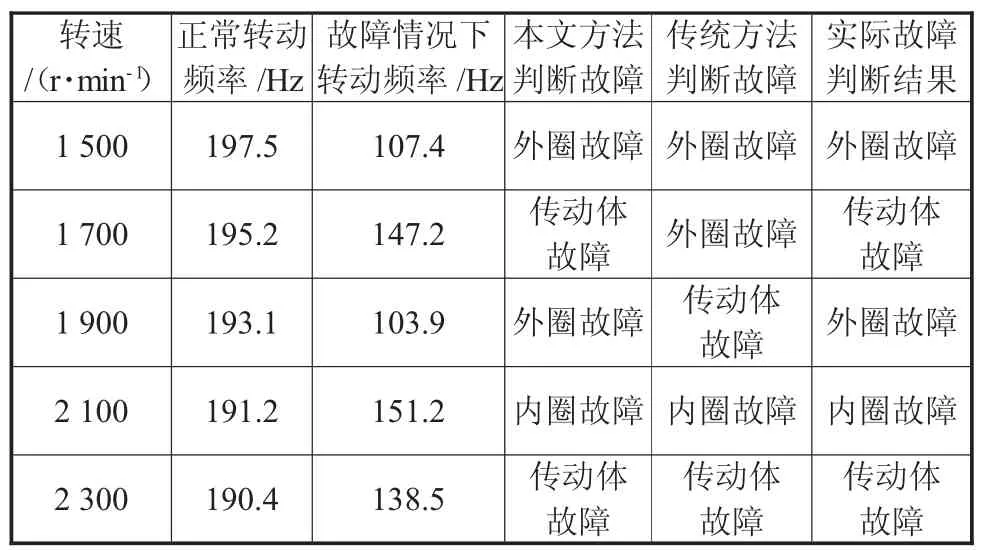
表2 两种方法无人机传动轴故障诊断效果对比
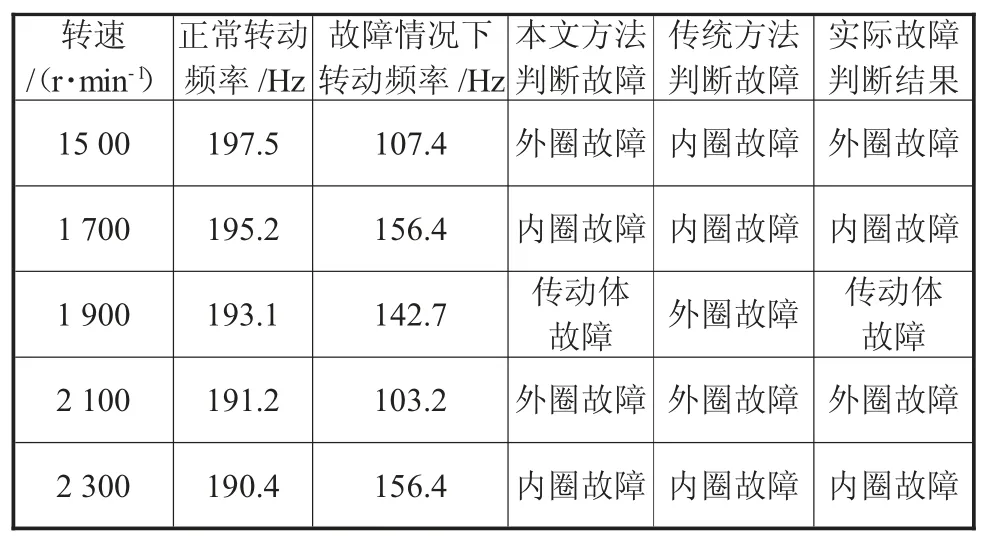
表3 两种方法无人机传动轴故障诊断效果第二次对比
从表3 中数据可以看出,本文设计方法对于无人机传动轴故障数据的分析依旧较为准确,诊断精度依旧与上一次实验相同,为100%;而传统方法在实验无人机传动轴转速为1 500 r/min 与1 900 r/min情况下出现了诊断错误,诊断精度依旧低于本文方法。
因此实验证明了设计方法对于无人机传动轴故障诊断分析与排除具有较高的精度,可以准确地识别无人机传动轴故障,能够实现无人机传动轴故障特征以及故障位置的诊断。
3 结语
此次结合现有研究理论,针对无人机传动轴故障诊断分析与排除存在的问题,引入无线传感技术、差值分析函数以及特征差别法理论,设计了一种新的排除方法,有效降低了无人机传动轴故障错排率,实现了对传统方法的优化与创新。
