基于改进的韦伯算子的带钢边部缺陷识别
2022-05-08徐治东杜培明张仁春
徐治东,杜培明,张仁春
(安徽工业大学 电气与信息工程学院,安徽 马鞍山 243000)
引言
带钢边部出现的缺陷主要包括孔洞、缺口和豁口,本文通过提取图像的纹理特征训练支持向量机(SVM),完成对带钢边部缺陷的在线检测[1-3]。
1 带钢边部图像特征提取
1.1 差分激励
像素点xc差分激励为ζ(xc),计算过程如图1所示:

图1 差分激励计算图
首先用滤波器f00计算出当前像素点与其邻接像素点之间的灰度差值,公式如下:

其中xi(i=0,…,p-1)表示当前像素点x 的p 个相邻的像素,进一步计算的比值:


1.2 梯度方向
韦伯局部描述符中的梯度方向,可由公式4 进行表示:

为了获取图像中更多的纹理细节信息,在量化之前首先对θ 做如下映射f:θ→θ′
易知,0∈[-π/2,π/2],θ′∈[-π/2,π/2]。通过公式6,即可得到图像局部区域内的梯度方向分量,其量化函数如公式7 所示。

1.3 直方图
首先利用ζ(xc)和φ(t)并对其进行量化差分激励图像和梯度方向图像得到其二维直方图{WLD(ζn,φt},每一小块WLD(ζn,φt)对应的值是一个确定的差励区间ζn,和梯度方向φt的频率。
把构成直方图矩阵的N×T 个子直方图按行串接起来得到N 个一维直方图H(n)={Hn,t},t=O,…,T-l 再将N 一维直方图H(n)依次首尾相接,从而形成最终的一维直方图H=[H(O),H(1),…,H(N-1)]。
1.4 原始WLD 的不足
1)局部窗内像素点与中心像素点间的灰度差值之和导致了灰度变化信息没有充分体现;
2)方向算子仅表达了水平方向和垂直方向上灰度变化梯度的空间分布。
1.5 改进之后的WLD
为了增强纹理模式的可性,L-WLD 首先分别计算正、负差分激励,再将负差分激励变乘上负一与正激励一起加到中心像素再取平均值;
2)为了提高纹理模式的识别能力,L-WLD 利用拉普拉斯算子代替原始WLD 的方向算子提取方向分布的信息[4]。
2 基于SVM 的分类识别
本文的目的是为了验证所提出的改进韦伯局部描述子用于缺陷检测上的有效性,而对分类器的选择不作过多关注[5]。因此,为了跟前人提出的原始WLD 方法进行比较,为了保证对比性,我们也采用和前人一样的线性核SVM作为缺陷检测的分类器[6]。
3 实验结果与分析
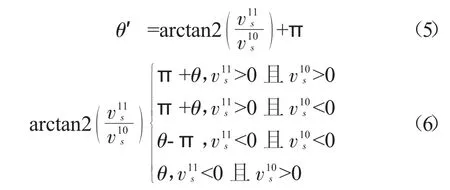
本文使用的数据集中包括70 幅有孔洞缺陷、70 幅有缺口缺陷以及70 幅有豁口缺陷和200 张无缺陷图片(如图2-图5 所示)[7]。

图2 无缺陷图
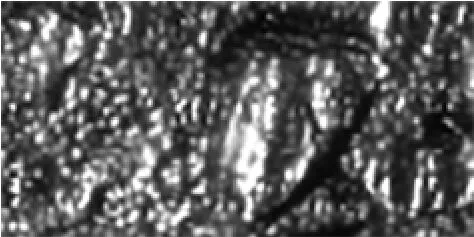
图3 空洞图
图4 缺口图

图5 豁口图
3.1 分类器训练
为比较L-WLD 与WLD 的性能采取两种训练方式,第一种训练中每个图片种类读取3×i 个图片用于训练,然后每个图片种类读4i 张图片用于预测,而在第二种训练方式中,每次训练的图片与第一种训练方式一样,预测的对象为每个图片种类的整个数据集,每次的训练的准确率和召回率记录在纵轴中,横坐标为训练集的大小(如图6-图9 所示)[8-9]。
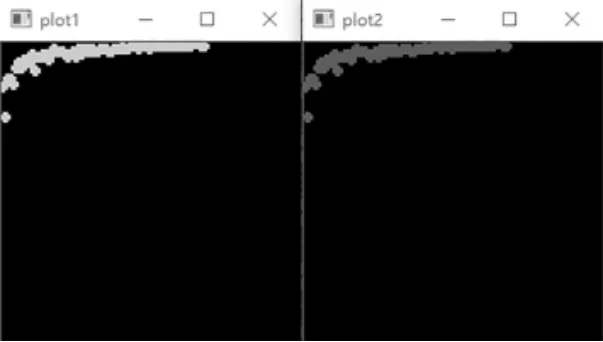
图6 WLD 的第一种训练方法

图7 WLD 的第二种训练方法
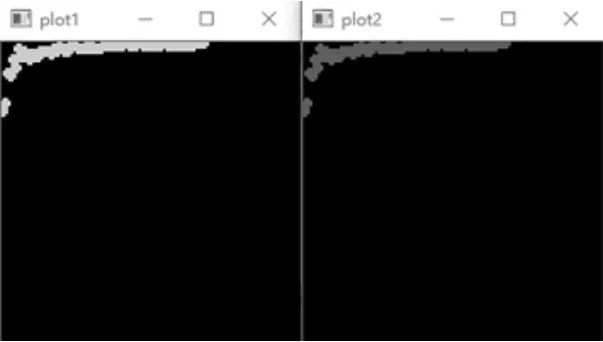
图8 L-WLD 第一种训练方法

图9 L-WLD 的第二种训练方法
4 结语
实验结果表明,改进的韦伯描述符特征比原始韦伯描述符特征能更有效地刻画出带钢边部缺陷,也获得了更好的带钢边部缺陷检测性能。
