高斯混合标签多伯努利滤波器的传感器控制策略
2022-05-08刘雅婷
陈 辉, 刘雅婷, 王 莉
(兰州理工大学 电气工程与信息工程学院, 甘肃 兰州 730050)
在现代军事领域中,多目标跟踪[1-4]的环境愈加复杂,需要对多目标的状态与航迹进行实时跟踪估计,从而改善监控区域内认知与对抗的过程,并依据传感器控制[3,5]的优化准则最大程度去优化接收信息的质量.
近年来,多目标跟踪算法一直备受关注.其中,基于随机有限集 (random finite set,RFS)[3]的多目标跟踪算法是直接在多目标贝叶斯滤波框架下,根据量测集合递推来计算多目标的后验概率密度,该方法可以避免量测与目标之间的数据关联.在基于RFS的多目标跟踪算法中,势均衡多目标多伯努利 (cardinality balanced multi-target multi-bernoulli,CBMeMBer)[6]滤波器相比于其他滤波器,其在状态提取时不需要聚类运算,可通过一组数量固定且相互独立的伯努利参数直接近似多目标密度得到,从而能够有效降低其计算复杂度.但CBMeMBer滤波算法仅仅对多目标的运动状态和数目进行估计,而无法对目标航迹这一关键信息进行估计分析. 因此,Vo等[7-8]于2013年将RFS理论与数据关联中的多假设思想相结合,提出广义标签多伯努利滤波(generalized labeled multi-Bernoulli filter,GLMB)算法,后续对GLMB滤波算法近似得到标签多伯努利滤波(labeled multi-Bernoulli filter,LMB)[9]算法.与 GLMB 滤波相比,LMB滤波算法是通过减少部分跟踪精度来有效降低计算复杂度,可采用高斯混合(Gaussian mixture,GM)的实现方式,在线性高杂波密度场景下有较好的滤波效果.
随着多传感器信息融合技术的发展,在实现对多目标跟踪后,传感器控制优化决策方案亦受到广泛关注.多目标跟踪中传感器控制和优化的关键是依据一定的最优准则,通过建立便于量化并具有可参考性的评价函数去选择传感器的工作状态或运行参数,从而使得多目标跟踪性能达到最优.这类控制问题通常在部分可观马尔可夫决策过程(partially observable markov decision process,POMDP)[10-11]的理论框架下进行,POMDP一般包括当前信息状态、可允许的传感器控制集合和与其相对应的评价函数.在有限集统计 (finite set statistics,FISST)[3-12]理论框架下的传感器控制方法,依据控制的决策评价体系可分为基于任务准则的决策和基于信息准则的决策.其中,基于任务准则的传感器控制只适用于单一指标优化问题,难以胜任多个任务指标同时竞争优化.而基于信息准则的传感器控制是通过多目标概率密度之间的信息散度来建立,可以权衡多个任务指标的竞争优化[13],如柯西施瓦兹(Cauchy-Schwarz,CS)散度[14-15].Beard等[16]选用 GLMB 滤波之间的 CS 散度作为评价函数,证明 CS 散度可以在 GLMB 滤波中求得闭式解.Vo等[17]在此基础上提出了利用吉布斯采样的方法对 GLMB 滤波算法进行改进,并采用多传感器控制方法对滤波进行优化.
目标威胁度评估[18]是传感器控制的另一重要组成部分,近几年成为一个新的关注点.其通过多属性信息的综合评定对监控区域内的目标进行实时评估,进而控制传感器重点对更感兴趣或威胁度等级更高的目标进行跟踪优化,与传感器控制的最优准则相结合,缩小传感器控制集合,着重对最大威胁度目标持续跟踪优化.在对最大威胁度目标跟踪优化时,可根据目标的标签[19]或扩展形状[20]对其选择性跟踪.
本文基于GM-LMB滤波器,在POMDP理论框架下,提出基于信息准则的传感器控制方法.首先,利用标签 RFS 对多目标的运动状态与量测进行建模,并基于信息准则对多目标跟踪进行传感器控制及滤波优化.其次,为有效降低传感器控制中伪更新步骤的计算复杂度,利用多伯努利参数替代标签多伯努利参数进行伪更新,并依据两个 GM 之间的 CS 散度作为评价函数,进而决策最优传感器控制方案.此外,在 CS 散度作为评价函数对多目标跟踪优化的基础上,以信息增益最大化为准则,基于威胁度评估传感器控制对最大威胁度的标签目标进行持续跟踪优化.
1 问题提出
1.1 标签多伯努利滤波器
LMB滤波器是GLMB滤波器的一种改进形式,并且高效近似于δ-GLMB滤波.相比于δ-GLMB滤波中假设分量数在迭代过程中呈指数级增长的复杂计算,LMB滤波器在更新中对分量进行分组并行计算,使其在迭代过程中假设分量呈线性增长.在保持了高跟踪精度的前提下,降低了其计算复杂度.

LMB的参数与多伯努利随机有限集有相似的形式π={r(l),p(l)):l∈L},并且标签多伯努利随机有限集的概率密度函数为
π(X)=δ|X|(|L(X)|)ω(L(X))[p]X
(1)

设k-1时刻的多目标后验概率密度函数的形式如式 (1),则k时刻的预测概率密度函数为
(2)

(3)
在预测步中,LMB 滤波器与多目标多伯努利(multi-target multi-Bernoulli,MeMBer)滤波器的形式与运算均相同.而在更新步中,需要将LMB滤波的多目标预测概率密度函数转换成δ-GLMB的形式进行更新,得到更新后的δ-GLMB形式的后验概率密度.为了使LMB滤波的贝叶斯递归闭合,最后再将δ-GLMB 形式的后验概率密度近似为LMB形式.
设k时刻的量测集合为Z={z1,z2,…,zM},其中M为量测的个数,则k时刻的多目标后验概率密度函数为
πk(·|Z)={(r(l),p(l)(·))}l∈L+
(4)
LMB滤波在更新步骤中利用δ-GLMB后验概率密度函数的一阶矩直接对多目标后验概率密度近似实现,而不是MeMBer滤波中通过概率生成函数近似,所以LMB滤波在估计目标航迹的同时,其跟踪性能也高于MeMBer滤波.而与δ-GLMB滤波相比,LMB更新中分量进行分组并行运算,不会生成由于数据关联不确定性造成的多假设分量.
高斯混合算法 (GM) 的本质是在每个运动模型和量测模型均为线性高斯的条件下,用一组高斯混合形式表示目标的概率密度函数,目标状态的概率密度表示为
(5)
式中:p(x)表示目标状态的概率密度;N(x;m(l,j),P(l,j))表示一个均值为m、协方差为P的高斯概率密度函数;J(l)表示高斯分布的个数;ω(l,j)、m(l,j)、P(l,j)分别表示第l个跟踪轨迹的第j个部分的权重、均值和协方差.
在GM-LMB 实现过程中,为减少计算复杂性,在更新步骤中将目标和量测分组并行运算,但此过程中需要将 LMB 滤波的更新部分与 δ-GLMB 滤波的实现方法相同,尽管在预测与更新步骤中用到 K 最短路径、Murty 排序分配的剪枝算法以及对量测分组并行运算的方法,但是仍有较高计算复杂度.
1.2 基于信息论的传感器控制一般方法
本文依据的传感器控制方法一般是在POMDP 理论框架下进行的,其具有几个相关要素.首先,k时刻能够实现的传感器控制集合Uk中包含的每种控制方案u都对应当前时刻的传感器的新位置.其次,在RFS框架下,根据当前时刻的多目标后验概率密度函数pk(Xk|Z1∶k)描述多目标状态信息的不确定性.最后,传感器控制方法的核心要素是由传感器控制方案u建立对应的评价函数R(u),即:
R(u)=Dc(pk(X|Z1∶k-1),pk(X|Z1∶k-1,Zk(u)))
(6)
式中:pk(X|Z1∶k-1)表示多目标先验概率密度函数;pk(X|Z1∶k-1,Zk(u))表示多目标后验概率密度函数;Zk(u)表示控制方案u条件下的预测理想量测集(predicted ideal measurement set,PIMS),从而得到最优传感器控制序列uk,即:
(7)
2 标签多伯努利滤波器基于柯西施瓦兹散度的快速传感器控制方法
柯西施瓦兹散度的传感器控制方法是在POMDP 理论框架下,基于信息散度的传感器控制方法.由于 LMB 滤波具有较高的估计精度,本文选择 LMB 滤波器解决多目标跟踪问题.相比于其他基于随机有限集的滤波器,其唯一的缺点是更新步骤中计算复杂度高的问题,从而导致传感器控制优化中更新部分的效率较慢.
本文为降低该算法更新部分的计算复杂度,在传感器控制的伪更新步骤中,利用多伯努利更新部分去替代 LMB 滤波的更新过程.首先,为了使用多伯努利滤波进行伪更新,需要将 LMB 的预测步骤中带有标签参数的标签丢弃.其次,利用 MeMBer 分布的预测参数对 LMB 滤波中的多目标数目和状态进行预估计.为了方便传感器能够快速有效地做出决策,在“Myopic”(即H=1)方案[21]下,根据每种控制方案去确定传感器位置,利用 PIMS 方法生成一组关于预估计目标的伪量测.然后,利用 CS 散度在高斯混合条件下的闭式解[22],通过对评价函数计算去确定最终控制方案.最后,传感器在新的控制位置接收到实际的量测集合之后,再执行 LMB 更新.
令p0和p1分别表示多目标的先验和后验概率密度函数,两个概率密度函数之间的CS散度为
(8)
其中:式(8)的积分为集值积分.根据式(6)和式(8),CS散度的评价函数可表示为

(9)
在GM-LMB滤波过程中,利用多个带标签的伯努利过程近似多目标概率密度函数,而每个伯努利过程的概率密度函数可以通过近似一组加权的高斯分量去实现.由式(9)可以看出,传感器控制CS散度是由两个GM之间的计算得到.其具体的求解步骤如下:
首先,先验概率密度可以用高斯分量的混合形式近似表示为

(10)
(11)
为了方便多伯努利的更新部分替代LMB滤波的传感器控制中的伪更新,可将用于传感器控制的预测部分中参数的标签舍弃,得到未标签的预测多目标概率密度为
(12)
LMB滤波中未标记的参数等同于MeMBer滤波的参数,且在预测步骤中LMB滤波与MeMBer滤波的形式与运算均相同.因此,传感器控制中预测的多目标密度去标签化后得到
(13)
(14)

(15)


(16)
为计算式(9),依据高斯分布之间的乘积公式:
(17)
借助式(17)可将式(9)推导为
(18)
其中
按照式(18)计算出Rc(u),并且确定最终的控制方案uk,传感器在当前时刻的控制位置xs,k(uk)可以接收实际量测Zk(uk).
3 基于威胁度评估的传感器控制方法
本文第2节是在GM实现条件下基于 CS散度的传感器控制方案,是对监控区域内所有目标进行优化的决策方案.而基于威胁度评估的传感器控制方案是在此基础上缩小传感器控制集合,只对传感器控制方案中的威胁子集进行优化估计跟踪.本文采用经典的战术意义标绘(tactical significance map,TSM)[22]函数,是综合各方面因素对威胁评估贡献程度呈非线性变化得到的函数[18].因此,可以基于标签多伯努利参数提取多目标运动状态去分析多目标运动态势,并选择 TSM 函数去确定当前时刻各目标的威胁程度.
假设k时刻目标的位置表示为xt,k,传感器位置表示为xs,k,则目标和传感器之间的欧氏距离可表示为
di=‖xt,k-xs,k‖
(22)
TSM 函数可由目标的战术重要性评估得到关于目标与传感器位置之间欧式距离di的函数表达式:
(23)
由式(23)可以看出,目标与传感器之间的欧氏距离越小,其威胁度越大,综合威胁等级越高.σTSM与另两个因素相关,即目标的速度和航向角,其表达式为
(24)
其中:pi和vi分别表示目标i相对于传感器的位置矢量和速度矢量;k0和m0为TSM函数的常数;θ(pi,vi)为目标i与传感器之间的航向角.目标的航向角可理解为目标的位置与速度两个矢量之间的夹角,求得表达式为
(25)
其中:(pi,vi)表示标量积.
结合式(22~25),TSM最终表达式为
(26)
依据式(6,8),利用最大威胁度目标的先验和后验概率密度来求解基于CS散度的传感器控制策略.
4 仿真实验
仿真实验结合一个线性高斯化的例子,比较标签多伯努利滤波基于CS散度的传感器控制方案与基于TSM的传感器控制方案在相同场景下对多目标跟踪滤波优化的性能.
4.1 场景
设场景参数如下:在监控区域[-1 000 m,1 000 m]×[-1 000 m,1 000 m]内,对4个目标进行跟踪.场景中目标轨迹均为近常速运动模型(nearly constant velocity model,NCVM),状态转移密度为
其中:In代表n×n的单位阵;σv=5 m/s2.

表1 多目标参数

(29)

4.2 传感器控制集合
假设k时刻传感器的实际控制位置为xs,k=[xs,k,ys,k]T,则k+1时刻所有会出现的传感器控制的位置集合为
(30)
本文选择NR=2,Nθ=8,则共对应17种控制方案(包含传感器处于静默状态).vs,c是传感器自身的容许控制速度,设为20 m/s.
4.3 仿真分析
实验中采取4种方案对传感器控制方案与态势评估策略分别对比,并且对以下方案分别进行50次蒙特卡罗仿真实验.其中,方案1是传感器“Stationary”控制方案,此方案令传感器在整个跟踪过程中保持初始位置不动的状态.方案2为传感器“Random control”策略,即随机选取每个时刻可获取的控制集合中的传感器控制方案,其通常被作为典型的控制方案进行比较.方案3为基于“Proposed CS control”的方案,即对 GM-LMB 求解 Cauchy-Schwarz 散度作为评价函数的快速传感器控制方案,其是需要最大化多目标的整体信息增益传感器控制方案.方案4是“Threaten control”的方案,表示基于多目标战术重要性评估传感器控制.
根据构建的仿真场景,实验中多目标运动参数如表1所列,单次仿真实验中多目标运动轨迹如图1所示.

图1 多目标运动轨迹图Fig.1 Multi-target trajectories
实验中选用 OSPA 距离作为评价指标对多目标跟踪性能进行评价,4种控制方案的 OSPA 距离统计结果如图2所示.由图2可以看出,方案1中的传感器保持静默状态,与运动的传感器相比,跟踪效果最差.而“Threaten control”方案只着重去调节最大威胁度的目标,无法顾全监控区域内其他目标的运动状态,因此方案4跟踪性能也较差.相比较而言,基于“Proposed CS control”方案的跟踪效果明显优于其他三种方案,得到了最优的传感器控制策略.
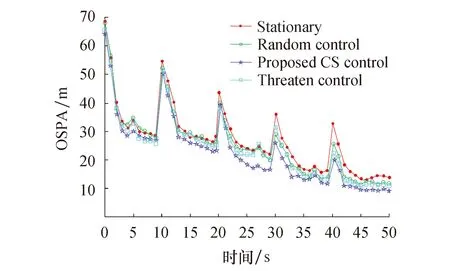
图2 4种传感器控制方案运动状态估计OSPAFig.2 FOSPA statistics of four control strategies to motion state
表2是基于 LMB 滤波器的一般传感器控制方案与本文所提快速传感器控制方案的 OSPA 距离均值,能够更加清晰地对目标的跟踪精度进行分析.表3是基于 LMB 滤波器的一般传感器控制方案与快速传感器控制方案单步平均运行时间的对比,由于两个方案具有相同的多目标跟踪部分,所以可以将表3作为两个方案的传感器控制部分的对比.由表2与表3可以明显看出,在保证多目标跟踪精度的前提下,采用去标签化处理的传感器控制策略能够有效降低计算复杂度,提高其运行效率.
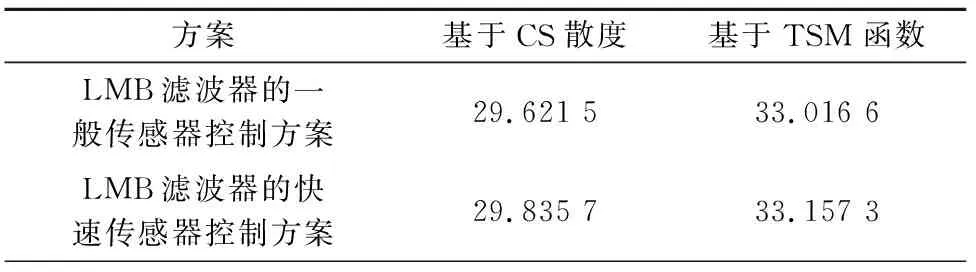
表2 各方案下的OSPA均值

表3 传感器控制方案单步平均运行时间
图3是本文基于“Proposed CS control”方案的传感器管理算法在单次仿真实验中的传感器运动轨迹,在整个传感器控制过程中,传感器会根据多目标先验与后验两个概率密度之间的信息增益最大化的准则,不断地对自身的位置进行自适应调节,以保证传感器每个时刻都能获得最优的量测信息.从单次运动轨迹图中也可以看到,随着目标的新生和消亡,传感器的位置会发生明显的轨迹变化,这是由于传感器为获取最大化的多目标信息增益而调节自身位置的过程.
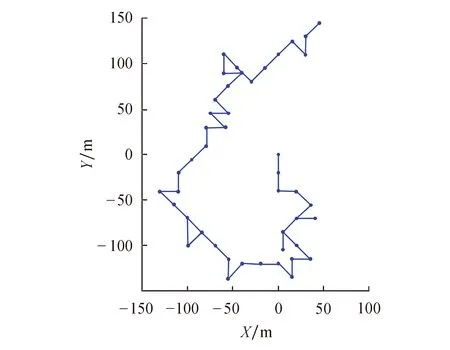
图3 单次MC方案3的传感器控制轨迹Fig.3 Sensor control trajectory of single MC in the third control strategy
传感器基于最大威胁目标的运动轨迹如图4所示,由图可以看出,随着每个目标对传感器威胁程度的不断变化,传感器可以在第一时间作出响应,并快速调整当前时刻自身的位置以应对威胁态势的变化.这是由于TSM函数是依据多目标的运动态势来确定各个时刻最大威胁度目标,进而确定目标跟踪的优先级,始终确保对最大威胁目标的跟踪估计,最终得到使最大威胁目标跟踪性能达到最优的传感器控制方案.
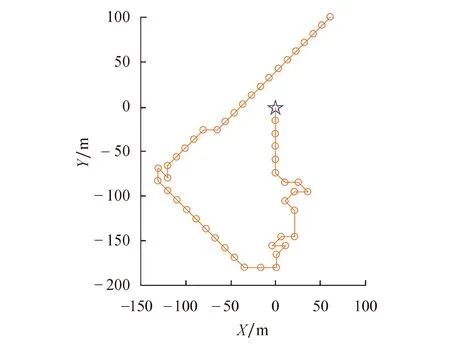
图4 单次MC方案4的传感器控制轨迹Fig.4 Sensor control trajectory of single MC in the fourth control strategy
基于“Proposed CS control”方案与“Threaten control”方案的最大威胁度目标状态估计OSPA距离比较如图5所示,可以看出,“Threaten control”方案的跟踪优化效果较好,这也验证了实时对多目标进行威胁度评估来确定多目标跟踪优先级的传感器控制方案,是针对最大威胁目标的最优传感器控制方案.与图2的多目标状态估计OSPA距离进行比较,可以发现“Threaten control”方案只是针对威胁目标的最优控制方案,在面对所有目标的跟踪优化时,其跟踪优化效果不如“Proposed CS control”方案.
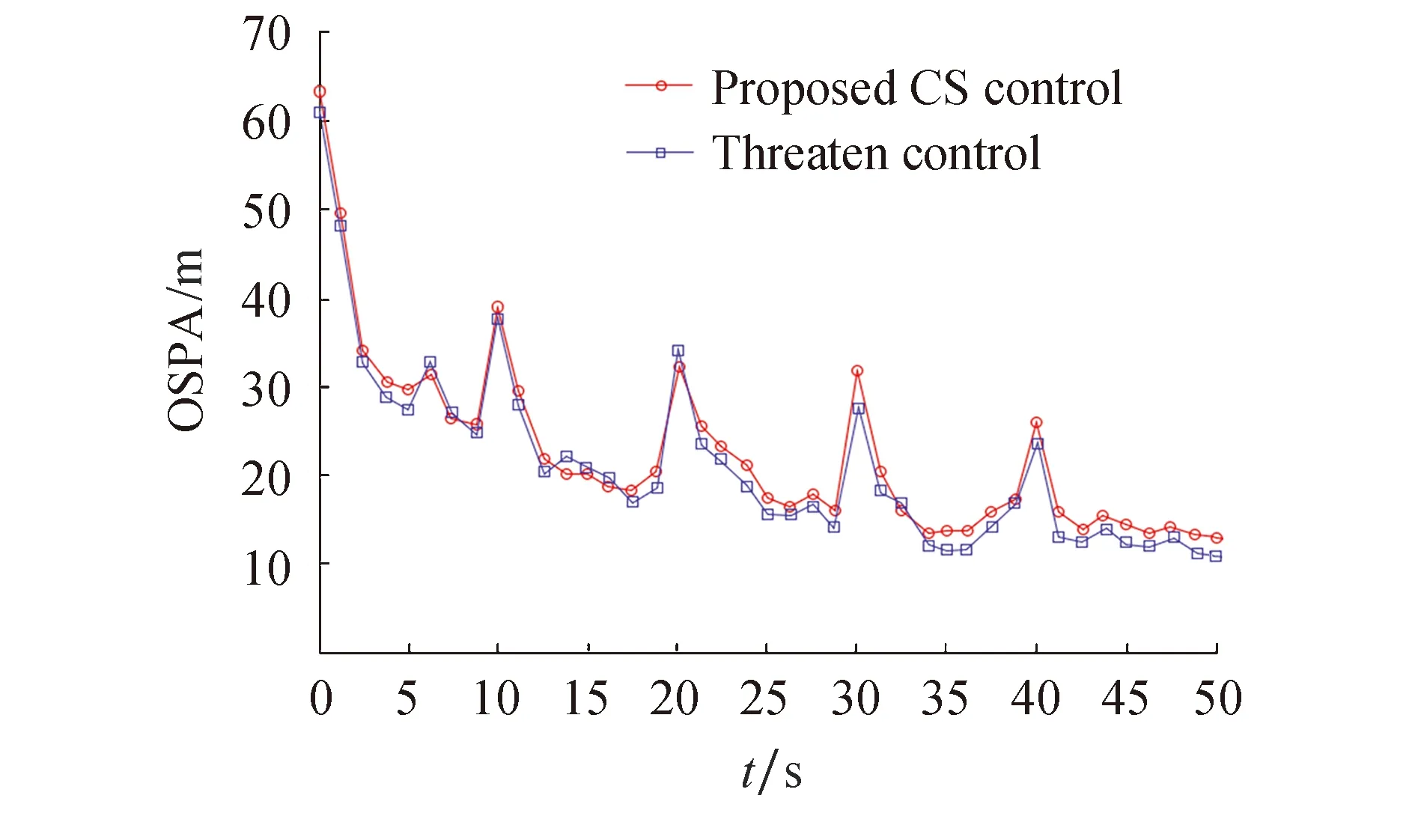
图5 最大威胁度目标子集位置估计的OSPA比较Fig.5 Position OSPA for the maximum threat target set
四种方案对目标势(即数量)的估计如图6所示.可以看出,除了在目标数目变化时刻会出现短暂的估计偏差,四种方案的估计均接近真实数目,并且随着实验的进行,估计值可以快速进行调整.

图6 多目标势估计Fig.6 Cardinality estimation of multi-target
5 结论
本文的工作和创新点是基于GM-LMB滤波器,采用基于信息论的传感器控制方案,实现快速对LMB滤波的传感器控制,并且对监控区域中的目标进行威胁度评估.该方法中采用基于GM实现的柯西施瓦兹散度的传感器控制策略,针对运动目标的两个概率密度去求它们之间的CS散度,并基于GM-LMB滤波器对评价函数进行求解.此外,在传感器控制过程中,提出一种针对LMB滤波的简单控制方法,降低了计算复杂度,提高其运行效率.最后,本文提出的快速实现方法可以应用于其他相关LMB滤波的传感器控制方案中.
