防御性制空截击中警戒巡逻空域规划建模
2022-05-07徐鑫宇万路军戴江斌高志周
徐鑫宇, 万路军,,*, 陈 平, 戴江斌, 高志周
(1. 空军工程大学空管领航学院, 陕西 西安 710051;2. 空中交通管理系统与技术国家重点实验室, 江苏 南京 210007)
0 引 言
在防御性制空截击作战中,为保卫己方高价值目标,提升应对敌机空袭时的反应速度,通常在敌机主要威胁方向预先划设警戒巡逻空域,供歼击航空兵以较少兵力在指定空域和规定时间内进行警戒飞行,确保我机能够在第一时间截击、歼灭来袭敌机,或在发现敌机后引导己方地面兵力攻击敌机。因此,如何科学合理地规划出警戒巡逻空域,确保能够在截击线上截击敌机,又能保证我机自身的安全,是航空兵遂行截击作战任务亟需解决的关键问题之一。
军航飞行的特殊性,决定了与民航飞行空域规划有显著的区别。由于军民航之间对空域的定义以及管制权限的不同,造成军民航对空域规划有不同的理解与认识。民航空域规划是指对某一给定空域,通过对未来空中交通流的预测,根据空中交通流的流向、大小与分布,对区域范围、航路航线的布局、位置点、高度、飞行方向、通信/导航/监视设施类型和布局等进行设计和规划,并加以实施和修正的全过程。主要涉及规划、调整航路航线、不同管制区域的扇区、进离场程序等,空域种类较少,规划时考虑的主要因素是空中交通流量分布情况、空中交通管制服务的手段和方式、城市建设及安全保证等,以安全性为第一要务,目的是在保证安全的前提下,维护并加速空中交通的有序活动、提高经济效益。军航空域规划是指根据敌我态势、我方兵力技战术水平和上级指挥员意图,确定出空域的位置、大小、方向和高度范围等参数,供任务部队实施的过程。在军事行动中,为满足多样的任务需求,所需规划的空域种类多样,规划时考虑的主要因素为己方兵力部署、要达成的预期目标和敌方威胁等,目的是确保完成作战任务、有序进行空中作战和充分发挥作战效能,以效能为第一要务。
目前军航空域规划的相关文献相对较少。其中文献[19-22]对电子干扰、空中加油等几种典型任务空域进行规划,其核心思想是选取几个关键参数构建指标函数,而后采用遗传算法、灰狼算法等群体智能算法不断寻优。此类方法将空域规划问题转化为优化问题,为空域规划提供了可行的思路,但指标函数的构建是否合理对空域规划的结果影响很大。文献[23-25]采用几何分析方法,研究了航母编队中舰载机的空域配置问题,其中文献[23]分析了不同场景下歼击机的前出距离和行动方法,文献[24]定义了舰载战斗机空中巡逻空域部署优化的决策变量,建立了一种多目标规划模型,文献[25]着重探讨了舰载机执行警戒巡逻任务的时机。该方法模型构建较为简单直观,能够快速求解,但对空域这一三维立体空间的高度范围和方向考虑较少,并且航母编队中要保卫的高价值目标和飞机起降平台均为航母本身,而防御性制空截击中我方截击飞机起降平台为机场,敌方要打击的高价值目标可能是我方的指挥所、雷达站、地面部队集结点等战略要地,二者位置往往并不一致。
本文以一般情况下防御性制空截击作战时警戒巡逻空域规划为研究对象。空域规划过程可简要归纳为确定空域的方向、位置、数量和高度。首先,根据兵力部署规划出截击线的位置,由截击线确定截击范围;其次,在整个截击范围内,构建敌机威胁评估指标,评估敌机不同突击航线对应的威胁值,由威胁值最大的航线对应的角度确定出空域的方向;然后,在空域可规划范围内,确定出可规划空域的位置和数量;最后,根据敌机可能的突击高度,结合我机性能指标确定出空域的高度范围。从而构建一套完整包含空域方向、位置、数量和高度的警戒巡逻空域规划模型。通过仿真实验,验证了模型的合理性和有效性。
1 警戒巡逻空域的约束分析
防御性制空截击是指歼击航空兵在指挥机构的引导下,对敌空中目标实施拦截与攻击的战斗行动,是歼击航空兵基本的战斗活动方法。敌机的作战意图为对我方高价值目标实施打击,我机需要在截击线上击落敌机,以保证目标的安全。防御性制空截击中我方飞机的截击方式可分为从机场待战转入截击和从空中待战转入截击两种,二者共同完成截击任务。机场待战飞机通常按规定的战斗准备等级在机场待命,在指挥所分析、研判雷达情报信息后,下达起飞命令,并引导升空的飞机飞向预定的截击线实施空中截击。而空中待战飞机需要提前升空,飞往预先规划好的警戒巡逻空域待命,发现敌机后作为第一梯队首先投入战斗,为机场待战飞机起飞迎敌赢得时间。警戒巡逻空域是指为空中待战飞机实施空中警戒、巡逻和待战等任务而预先划设的空域。规划警戒巡逻空域的约束条件包括大小和方向约束、位置约束、数量约束和高度范围约束。
1.1 大小和方向约束
执行警戒巡逻任务的飞机在规定的时间和空间内,通常采用双180°跑道型或者“8”字型航线遂行警戒巡逻。其中,“8”字型航线适用于空中侧风较大的情况,属于特殊条件下的跑道型巡逻航线。而在实际飞行中,由于高空风以及导航误差的影响,飞机可能无法精确地沿预定航线飞行,因此需要在航线周围设置一定的安全余度,防止执行警戒巡逻任务的飞机与执行其他任务飞机产生飞行冲突,故警戒巡逻空域形状通常为矩形,如图1所示。
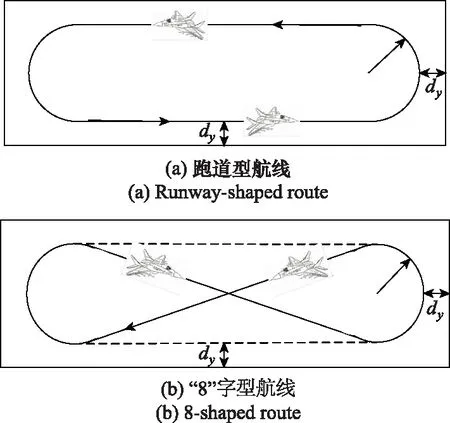
图1 两种警戒巡逻方式Fig.1 Two alert patrol modes
当飞机选择跑道型航线时,警戒巡逻空域的长边和短边分别为
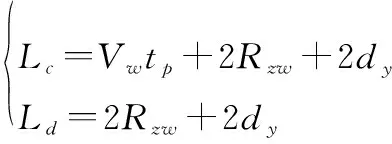
(1)
当飞机选择“8”字型航线时,警戒巡逻空域的长边和短边分别为
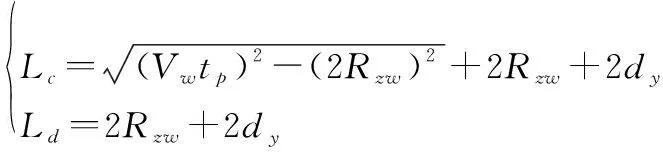
(2)
式中:为我机飞行速度;为平飞时间;为安全余度,通常取5 km;为转弯半径,其计算公式为
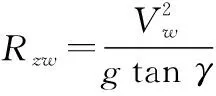
(3)
式中:为重力加速度,通常取98;为转弯坡度。
警戒巡逻空域的长边应当面向敌机最大威胁方向,目的是发现敌机后能够尽快出击,短边与长边垂直。因此,空域的方向定义为敌机最大威胁航线的斜率对应的角度。
1.2 位置约束
警戒巡逻空域的划设位置应当满足以下约束条件:
(1) 警戒巡逻空域位于作战责任区和截击线内侧,且与截击线、作战责任区分界线的距离不小于5 km;
(2) 警戒巡逻空域划设在己方雷达、通信保障范围之内,地面防空火力范围之外;
(3) 警戒巡逻空域的位置应能保证我空中待战飞机出击时,能够在截击线上任一点截击敌机。
1.3 数量约束
为提高截击成功率,确保己方保卫目标的安全,在空域可划设范围内通常划设多层警戒巡逻空域。空域数量根据空域可划设范围的大小、空域的大小、方向以及空域安全间隔确定。空域安全间隔是指为防止相邻空域内的飞机发生飞行冲突,而规定的空域之间应满足的最小距离。间隔设置过大会造成有限的空域资源浪费,过小则可能导致相邻空域内飞机产生飞行冲突,一般设置为5 km。
1.4 高度范围约束
警戒巡逻空域具有一定的高度范围,为保证我机在机动时间内通过爬升和下降,能够完全覆盖敌机可能的飞行高度范围,必须结合我机的性能指标确定出空域的高度范围。超出这个高度范围,我机可能无法在规定的时间内占据有利高度,影响截击任务的完成。
2 警戒巡逻空域规划建模
2.1 问题描述
在我方机场和空中待战飞机需要共同实施截击作战,确保在截击线上击落敌机,保证我方高价值目标的安全。由于空中待战飞机需要预先飞往指定的警戒巡逻空域执行警戒巡逻任务,因此如何根据己方兵力部署以及敌我态势,建立量化的、流程驱动的警戒巡逻空域模型,对于我空中待战飞机完成截击任务至关重要。同时避免因仅靠个人经验导致空域规划不够理想,使得我机无法在预定截击点完成截击任务的情况发生。结合截击作战特点,模型设计做出以下假设:
(1) 己方雷达发现敌机的位置与己方保卫目标的连线即为敌机突击航线;
(2) 我机的飞行速度保持不变;
(3) 忽略因飞行高度变化导致的我机爬升率和下降率的变化。
2.2 确定作战责任区和己方兵力部署
作战责任区为上级明确的己方部队负责的作战区域,通常为多个点连接而成的多边形区域。己方兵力部署主要考虑己方机场、通信设施、预警雷达和地面防空火力的部署位置及作用范围。己方作战责任区和兵力部署如图2所示。
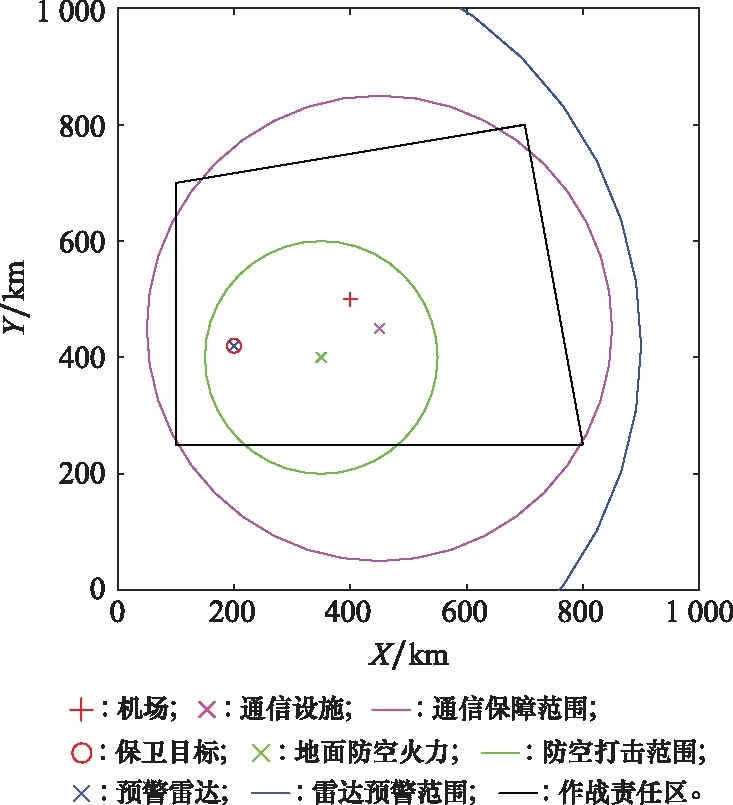
图2 己方兵力部署Fig.2 Our troops deployments
设己方通信设施的位置坐标为(,),通信保障半径为,则通信保障范围方程为

(4)
同理,由己方雷达部署位置及预警半径确定雷达预警范围方程;由己方地面防空火力阵地部署位置及杀伤半径确定杀伤范围方程。
2.3 确定截击线
截击线是指我机投入到对敌机的拦截与攻击时,击落敌机的点所连成的线。目前,截击线大多是根据经验临时划设,缺乏科学的手段。必须首先解决截击线划设问题,才能在此基础上进行警戒巡逻空域规划。因为少量的空中待战飞机不足以应对敌机空袭,截击线的划设位置要确保机场待战飞机能够有足够的时间起飞迎敌,对敌机进行截击。因此截击线的划设要综合考虑己方机场位置、飞机的作战半径、地面防空火力杀伤范围、通信保障和雷达预警范围等因素,同时满足以下3个约束条件:
(1) 截击线距己方保卫目标的最小距离要大于敌机所携带空对地导弹的最大射程,保证我机在截击线上截击敌机时,敌机无法对己方保卫目标进行打击。
(2) 截击线距己方机场的最大距离要小于我机的作战半径,否则,己方机场待战飞机在执行完截击任务后无法顺利返航。
(3) 截击线划设在己方通信、雷达保障范围内,使得指挥所能够对我机进行有效指挥引导。同时,截击线划设在地面防空火力之外,以避免遭到误击误伤。
由于敌机所选择的突击航线预先是不可知的,因此考虑在敌机的威胁方向上,按照每5°模拟出一条敌机的突击航线,在每条突击航线上计算出对应的截击点,各个截击点连成线即为截击线。截击线确定方法如图3所示。

图3 截击线确定方法Fig.3 Method for determining interception line
假设点为己方保卫目标点,己方预警雷达发现敌机的位置为点。发现敌机后,经过雷情上传指挥所、指挥所给己方机场待战飞机下达起飞命令、起飞、出航、上升到航线高度、沿航线平飞、接敌这一连串过程。在这段时间内,除去我机沿航线平飞的时间,敌机的前进距离为
=(++++)·
(5)
式中:为敌机飞行速度;为雷情传递时间;为己方机场待战飞机从接到命令到准备好起飞所用时间;为从起飞到机场出航点所用时间;为从出航点上升到航线高度所需时间;为接敌时间。敌机从点前进距离到达′点,设截击点集合为(=1,2,…,),己方机场到点′点的距离为,己方机场到截击点的距离为,′点到截击点的距离为。从己方机场位置向敌机突击航线做垂线,交点为′,己方保卫目标点到′点的距离为Δ,则
=-±Δ-cos(180°-)
(6)
令=-±Δ,设我机与敌机的速度比为,则在相同飞行时间内有=,式(6)可转化为=+cos。根据余弦定理有=+-2cos,转化为

(7)
、、均可计算得出,此时式(7)为一元二次方程,可解得两组,继而对应解出两组。值的约束条件为我机的作战半径,若≤,则求得的值符合实际;反之,应取代替,反求出。由=arccos[(-)],计算出,即为我机场待战飞机出击航线与敌机突击航线的夹角。设己方机场与保卫目标所在直线的斜率为,敌机突击航线斜率为,我机出击航线斜率为,有

(8)
由斜率和机场坐标可求出我机出击航线方程。敌机突击航线与我机出击航线的交点即为截击点,由各截击点依次连接成截击线。同时,应保证截击线满足约束条件,进而形成最终的截击线。
2.4 确定空域的方向
在保证完成截击任务的同时,要尽可能保存我机有生力量,而敌机选择不同的突击航线对我机构成的威胁不同,因此需要根据敌我态势构建威胁评估模型,评估出敌机不同突击航线对应的威胁值,并筛选出对我方威胁最大的敌机突击航线。警戒巡逻空域的长边与垂直,空域的短边与之平行,空域方向的数值等于的斜率对应的角度。如图4所示,本文综合考虑截击作战特点,选择敌机与我机的相对角度、敌机速度和敌我距离3项指标,构建威胁评估模型。采用灰色主成分分析法评估敌机不同来袭方向的威胁值,利用灰色关联系数矩阵取代传统主成分分析法的协方差矩阵,消除了指标数据之间量纲差异,同时避免了因数据的标准化处理对主成分降维效果的影响。本文对威胁评估指标的计算过程不再赘述,可参考文献[27]。
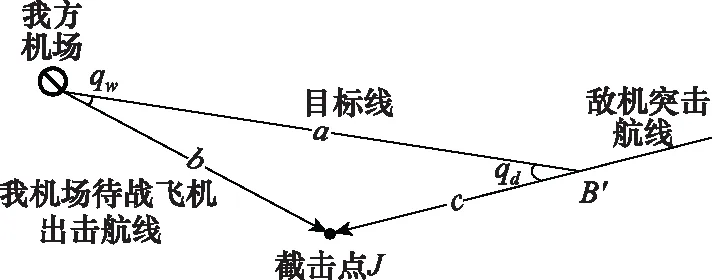
图4 敌机威胁态势Fig.4 Threat situation of enemy aircraft
(1) 角度威胁指数
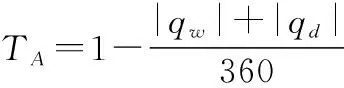
(9)
式中:为我机航向到目标线夹角;为敌机航向到目标线夹角。和的方向规定逆时针为正,取值范围为[-180°,180°]。
(2) 速度威胁指数
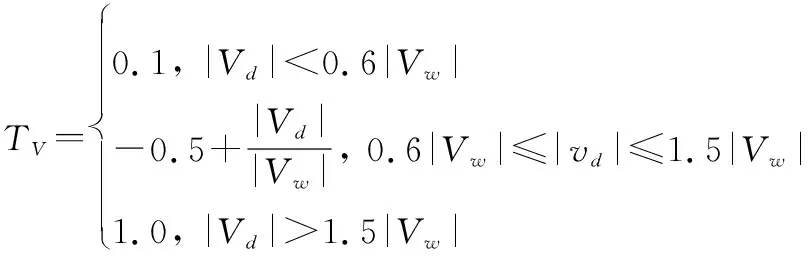
(10)
(3) 距离威胁指数
(11)
式中:为在敌机威胁方向上模拟出的敌机突击航线的总条数;为某条突击航线′点到截击点的距离在条航线中按从大到小排序的序号。
2.5 确定空域可划设范围
截击线划定之后,考虑在敌机来袭方向上,以较少飞机预先起飞进入警戒巡逻空域内飞行,以便发现敌机后迅速前出截击,并引导机场待战飞机起飞对敌机实施拦截。根据我机采用的截击战术确定出警戒巡逻空域的可划设范围。截击战术一般可分为转弯截击或迎头截击,其中转弯截击方式为后半球攻击,优点是相对容易建立攻击态势,并能够连续攻击,提高截击成功概率,缺点是建立攻击态势所需时间较长。迎头截击为前半球攻击,优点是能够缩短攻击时间,我机在完成攻击后能够迅速脱离;缺点是我机与敌机相对飞行,瞄准射击时间短促,第一次攻击不成很难再次攻击,且我机在攻击前需要考虑如何机动才能建立一定的角度优势。
转弯截击如图5所示。己方预警雷达发现敌机时,我空中待战飞机位于警戒巡逻空域内,经过传递雷达情报、指挥所下达出击命令后,率先对敌机进行截击。我机在点开始向出击方向转弯至点改平,平飞一段时间后在点转弯接敌,在截击点截击敌机。我机由点到点的出击转弯时间和点到点的接敌转弯时间的大小,与出击前我机的航向以及敌机相对于我机的位置有关。
图5 转弯截击Fig.5 Turning interception
为了使我机在各种情况下均能来得及在截击线上截击敌机,应当按可能出现的转弯时间最大值,即180°转弯时间进行计算,需要根据接敌态势确定,则
(12)
=+
(13)
式中:为我机预计攻击时间,由战术确定。此时我机由点到点的直线飞行距离,等于警戒巡逻空域至截击点的最大允许距离,故
=||=
(14)
式中:是我机出击后由到的平飞时间。从图4中可以看出,等于敌机由点到点的飞行时间减去雷情传递时间、和,即
(15)
式中:为敌机从雷达发现点到截击点的飞行距离。故从警戒巡逻空域到预计截击点的最大允许距离表示为

(16)
迎头截击如图6所示。我机在警戒巡逻空域内向截击点方向转弯,至点改平后,直接向截击点飞去,从警戒巡逻空域到预计截击点的平飞时间和最大允许距离为
(17)
(18)
式中:、、、、都是常量,此时是的函数。由于己方在进行警戒巡逻空域规划时是预先规划,并不清楚敌机具体的突击航线,因此敌机在威胁方向范围内选择不同的突击航线时,己方雷达发现敌机的位置点与对应的截击点之间的距离不同,故截击线上不同截击点所对应的也不相同。在进行警戒巡逻空域规划时,必须保证在敌机整个威胁方向范围内,在警戒巡逻空域中飞行的我机都能对其实施截击。
图6 迎头截击Fig.6 Head-on interception
设截击线与作战责任区上下边界的交点分别为和,经过和点的突击航线斜率分别为和。若敌机的突击航线斜率在区间[,]范围之外,则不属于我作战责任区的截击范围,由相邻作战责任区负责截击。因此,在警戒巡逻空域内飞行的我机若能够在和点均能截击敌机,则能够保证在截击线上任意一点截击敌机。
依据我机选择的截击战术,由式(16)和式(18)分别计算出截击点为和时,所对应的最大允许距离。其次,分别以和点为圆心,以警戒巡逻空域到两点的最大允许距离为半径作圆,我机在两个圆的相交区域活动就能保证在截击线上截击敌机。同时,加上空域的位置约束,得到的范围就是警戒巡逻空域的可划设范围,如图7所示。
图7 空域可划设范围Fig.7 Scope of airspace
2.6 确定空域位置和数量
由于空域的长边要与威胁值最大的敌机突击航线垂直,因此在空域可划设范围内作与垂直的直线,交范围于、两点,计算、两点间距离||,找到最靠近我方保卫目标且刚好满足||=的线段,如图8所示。
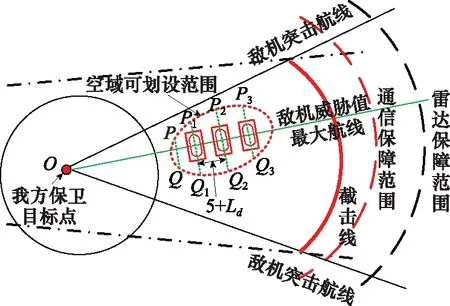
图8 空域的位置和数量Fig.8 Location and amount of airspace
由于警戒巡逻空域的边界要满足与截击线、地空火力边界线的距离不小于5 km的约束条件,因此将线段所在的直线沿着的方向向右平移5+2,交范围于、。若满足||≥,则线段的中点即为第1个警戒巡逻空域的中心点,转入步骤3;否则在空域可划设范围内无法规划出警戒巡逻空域。
由于相邻空域间仍要满足5 km的安全间隔,则两个相邻空域中心点之间的距离=5+,将所在的直线沿着的方向平移距离,交范围于、。若满足||≥,线段的中点即为第2个警戒巡逻空域的中心点;否则,在范围内只能规划出1个警戒巡逻空域。依此类推,求得所有满足条件的空域中心点坐标的数量,即为空域可划设范围内能够规划出警戒巡逻空域的数量。
当在空域可划设范围内,均无法满足||≥时,说明空域可划设范围过小而无法规划出警戒巡逻空域,此时的解决方案如下:
(1) 缩短空域的长边。由于飞机的转弯半径相对固定,空域短边长度固定,因而可减小我机沿警戒巡逻航线的平飞时间,继而缩短空域长边的长度。
(2) 平分截击范围。将己方作战责任区内的截击范围平均分成两部分。将这两部分截击范围看成两个相对独立作战责任分区,按照本节的方法,重新确定各分区内的空域可划设范围,在各分区内分别确定警戒巡逻空域的位置和方向,如图9所示。
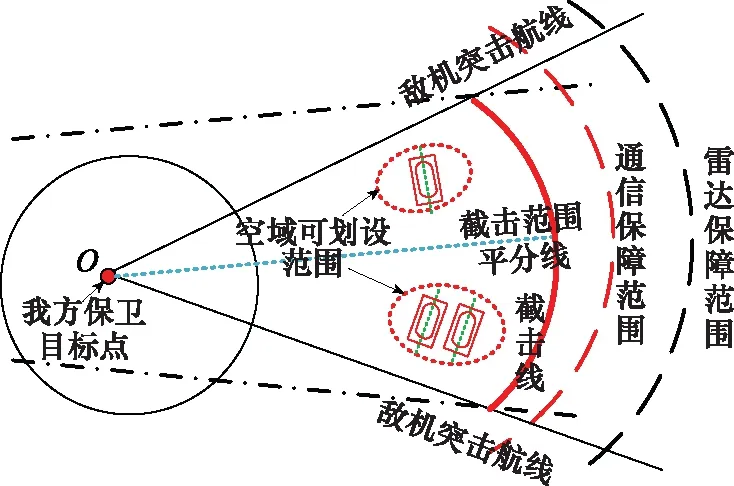
图9 平分截击范围Fig.9 Split interception range
设中心点坐标为(,),空域的4个角点坐标分别为(,),(,),(,),(,)。空域的4个角点坐标的计算公式为
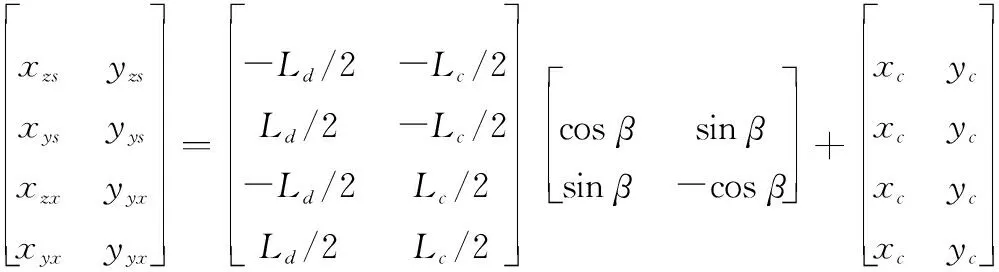
(19)
式中:为空域的方向。
3 警戒巡逻空域的高度范围
为保证截击任务的完成,警戒巡逻空域的高度范围需要根据我机的升限及敌机可能的突防高度范围来确定,保证能够对敌机可能的突防高度进行全覆盖。根据我机的爬升率和下降率,得到在可调整时间内所能爬升的高度Δ和下降的高度Δ:
Δ=·
(20)
Δ=·
(21)
我机在投入攻击前,为占据有利攻击态势,通常选择比敌机更高的飞行高度以建立高度优势,此时两机对应的高度差即为接敌高度Δ。我机警戒巡逻空域高度的上限与下限需要分别结合敌机可能突防高度的上下限进行计算,如图10所示,具体步骤如下。
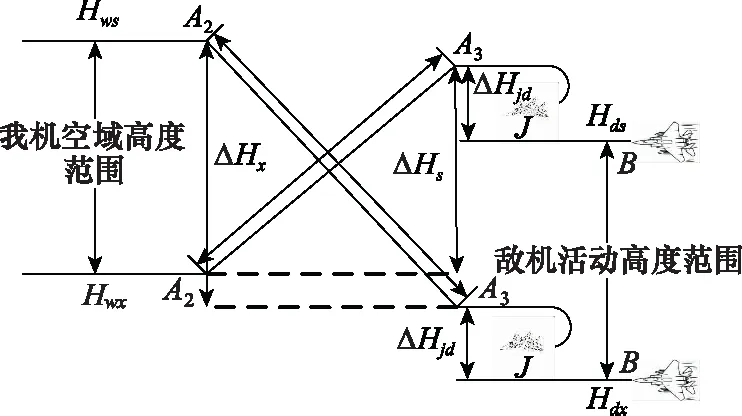
图10 空域高度范围Fig.10 Altitude range of airspace

(22)
(23)

(24)
4 仿真实验
为验证模型的合理性,设计仿真实验,仿真环境为Matlab R2018b。某次截击作战中,己方兵力部署为:己方要保卫目标的坐标为(200,320),机场坐标为(400,400),通信设施坐标为(450,350),雷达阵地坐标为(200,320),地面防空火力坐标为(350,300)。我机性能指标为:=1 000 km/h,=45°,=1.5 min,=2 min,=1 min,=1 min,=5 s,=5 s,=20 s,=100 m/s,=150 m/s,Δ=200 m,作战半径=1 000 km,我机在警戒巡逻空域中的巡逻航线为“8”字型航线。敌机性能指标为:=800 km/h,敌机所携带空对地导弹的最大射程为300 km。敌机为实现袭击的突然性,最有可能选择低空或超低空突防,假定敌机的突防高度范围为100 m到4 000 m。
假设己方通信保障范围为400 km,地面防空火力打击范围为200 km,雷达预警范围为600 km。在警戒巡逻空域内飞行的我机在预警雷达发现敌机后采取转弯截击战术,在预定截击点截击敌机。
在截击范围内,敌机从不同的方向进行突击,对应的威胁评估值如图11所示。当敌机突击航线的角度为21°时,对我机构成的威胁最大,因此警戒巡逻空域的长边应与该威胁值最大敌机突击航线垂直,即空域的方向为21°。

图11 仿真1中敌机威胁评估Fig.11 Threat assessment of enemy aircraft in simulation 1
仿真1的空域规划结果如图12所示,红色矩形为可规划空域的位置和数量。在仿真1规定的情景下,截击线上各预定截击点到机场的最大距离为262.2 km,小于我机作战半径;到己方保卫目标的最小距离为338.3 km,大于敌机空对地导弹最大射程。我机选择转弯截击战术时,在空域可划设范围内只能规划出1个满足条件的空域,空域中心点坐标为(521.7,536.2)。
图12 仿真1空域规划结果Fig.12 Airspace planning results of simulation 1
我机截击战术采取迎头截击,其他条件设置与仿真1相同。
仿真2的空域规划结果如图13所示。仿真2相较于仿真1,不同点仅在于我机采取的截击战术。由于截击线是以满足己方机场待战飞机起飞迎敌的条件来划设,与在警戒巡逻空域内飞行的空中待战飞机无关,因此截击线划设位置与仿真1相同,由截击线确定的截击范围也相同,敌机的最大威胁突击航线与仿真1一致,故空域方向、大小、高度范围均与仿真1相同。在仿真2中,由于采用迎头截击,在空域可划设范围内能规划出2个满足条件的空域,空域中心点坐标分别为(520.9,537.3)、(547.1,544.5)。原因在于相比转弯截击,采用迎头截击战术时,我机从警戒巡逻空域到预定截击点有更长的平飞时间,因此截击点对应的最大允许距离更大,使得空域的可规划范围变大,在空域的可规划范围内能够容纳更多的空域。
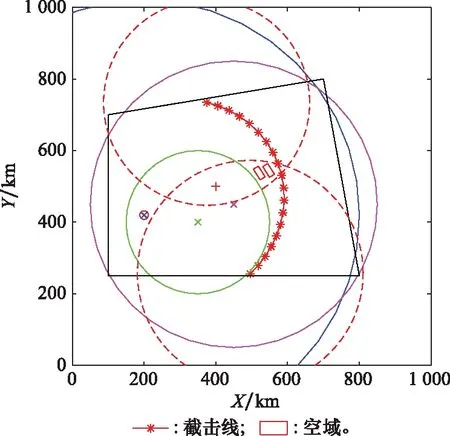
图13 仿真2空域规划结果Fig.13 Airspace planning results of simulation 2
假设己方部署更高性能雷达,此时己方雷达的预警范围提升到700 km,其他条件与仿真1相同。
在该情景下的截击范围内,敌机从不同方向进行突击对应的威胁评估值如图14所示。敌机突击航线的角度为-9°时,对我机构成的威胁最大,因此该情景下警戒巡逻空域的方向应为-9°。
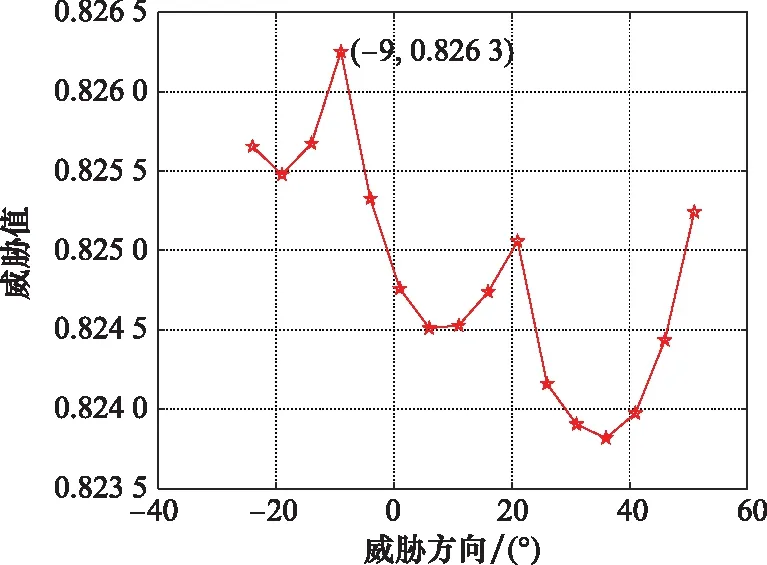
图14 仿真3中敌机威胁评估Fig.14 Threat assessment of enemy aircraft in simulation 3
仿真3的空域规划结果如图15所示。当己方部署更高性能的雷达以获得更大的预警范围时,截击线能够向敌机来袭方向推进,使己方保卫目标获得更大的安全范围。原因在于预警范围增大时,己方能更早地发现敌机,为己方机场待战飞机从起飞到接敌赢得更多的时间,当其他时间不变时,我机沿出击航线平飞的时间增大,使得机场到预定截击点的距离变大,截击线前推。此时截击线上各预定截击点到机场的最大距离为300.3 km,小于我机作战半径;到己方保卫目标的最小距离为407.7 km,大于敌机空对地导弹最大射程。
在空域的可划设范围内,能够规划出4个警戒巡逻空域,空域中心点分别为(541.4,524.4)、(564.4,527.5)、(587.5,530.8)、(610.7,534.6)。指挥员可以在这4个位置中选择1个或多个空域供己方空中待战兵力执行警戒巡逻任务,提高截击作战成功率。
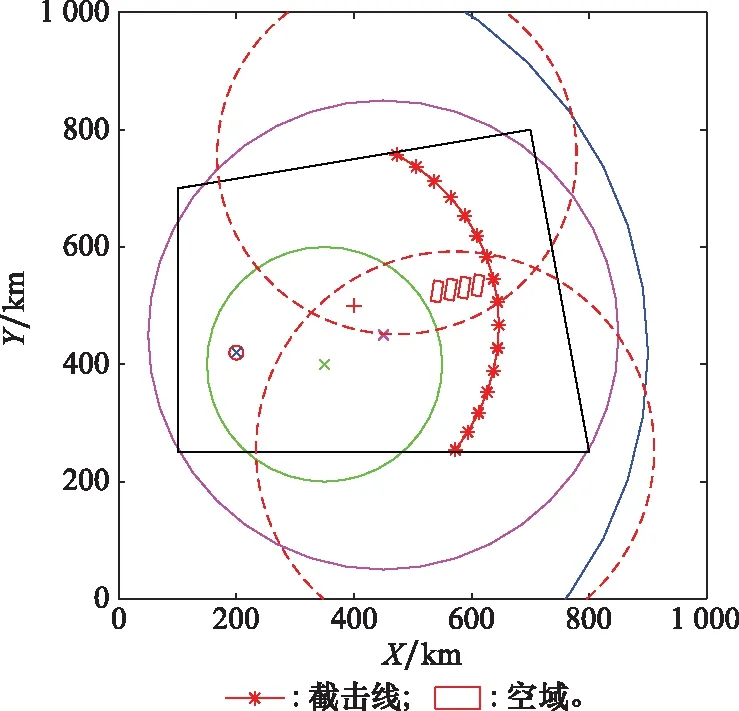
图15 仿真3空域规划结果Fig.15 Airspace planning results of simulation 3
考虑到敌方为掩护其突防飞机,可能在我作战责任区外对己方预警雷达和地面防空火力的制导雷达进行电子干扰。假设在敌方电子干扰下,己方雷达预警距离缩短为500 km,地面防空火力有效杀伤半径缩短为100 km。
由于敌机空对地导弹最大射程为300 km,以保卫目标为圆心,以300 km为半径做圆,称之为敌机导弹威胁圆。在该情景下计算出的部分截击点到己方保卫目标的距离小于300 km,会威胁到己方保卫目标的安全。因此,距离小于300 km的截击段用敌机导弹威胁圆代替,最终规划出的截击线如图16所示。在敌方进行电子干扰,己方雷达预警范围减小的情况下,截击线后移。从以上仿真结果来看,截击线的划设位置主要受己方雷达预警范围的影响,预警范围增大时,我机场待战飞机有更充足的时间到达截击预定截击点,使得截击线能够前推。
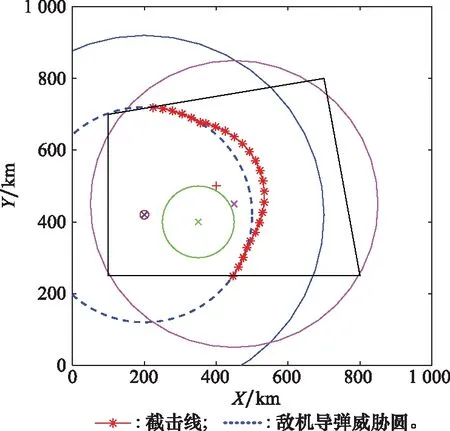
图16 仿真4截击线Fig.16 Interception line of simulation 4
此时,分别以截击线与作战责任区上下边界的交点为圆心,以相应的最大允许距离为半径做圆,两个圆无相交部分,如图17(a)所示,无法规划出能够保证在整个截击范围拦截敌机的空域。此时需要按照第2.5节的方法——平分截击范围,将整个截击范围分成独立的两部分,在两个独立的作战责任分区内分别进行空域规划。两个独立的作战责任分区内敌机的威胁评估结果如图18所示。上分区敌机突击航线的角度为56°时,对己方机场起飞的飞机构成的威胁最大,因此该情景下,上分区警戒巡逻空域的方向应为56°,同理下分区警戒巡逻空域的方向应为-14°。
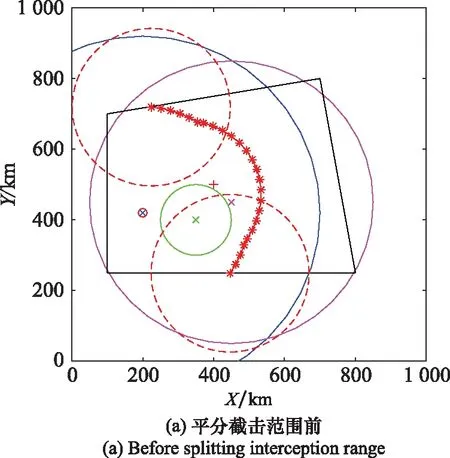
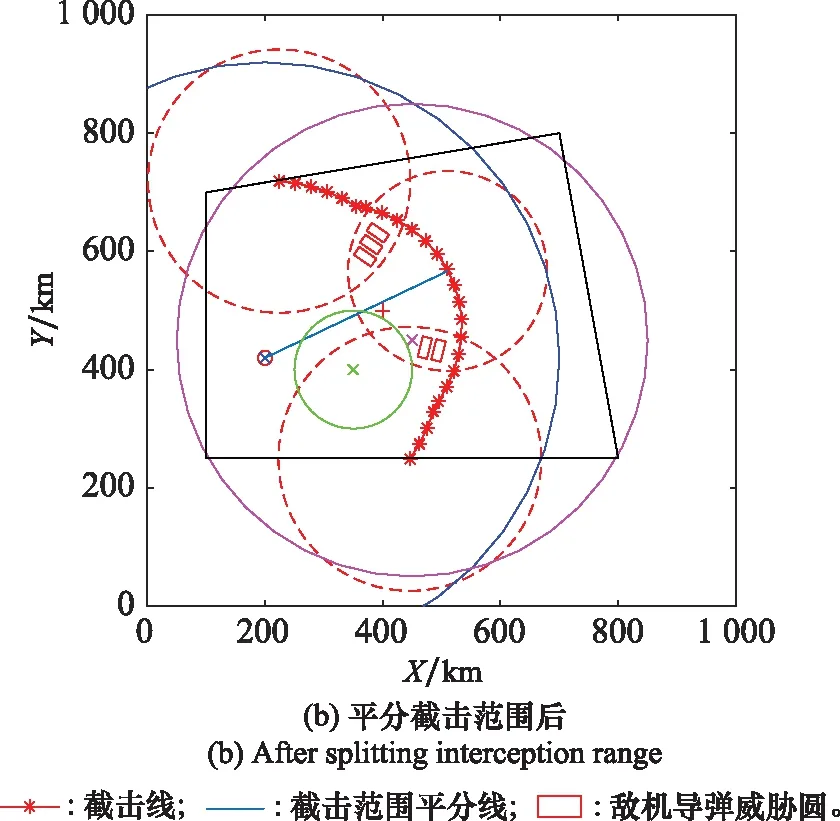
图17 仿真4的空域规划结果Fig.17 Airspace planning results of simulation 4
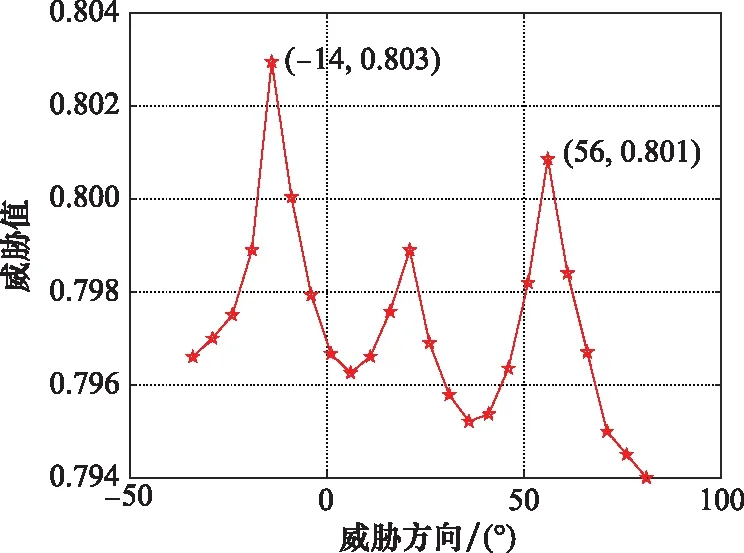
图18 仿真4中敌机威胁评估Fig.18 Threat assessment of enemy aircraft in simulation 4
仿真4的最终的空域规划结果如图17(b)所示。将作战责任区分为两个作战责任分区后,上分区可规划空域数量为3个,中心点坐标分别为(369.9,591.0)、(380.5,611.5)、(391.6,631.7);下分区可规划空域的数量为3个,中心点坐标分别为(471.5,437.2)、(494.7,432.3)、(507.0,430.6)。
理论上,在空域可规划范围内规划出的警戒巡逻空域,都能在任一预定截击点上截击敌机。为了进一步验证模型的合理性和有效性,针对上述4个仿真实验的情景,模拟敌机从不同方向突击时,在模型假设条件下,验证我机都能够成功截击。设我方所规划出距离截击线最远的警戒巡逻空域中心点为′,我机从′点到各个预定截击点所需的飞行时间为,敌机沿不同航线突击时,从被我方雷达发现点到各个预定截击点的飞行时间为。若不论敌机从任一方向突击,都有<,则能保证在警戒巡逻空域中的我方飞机都能够有充足的时间到达截击点,实现对敌机的成功截击。上述4个仿真情景中,和的关系如图19所示,可以看出,敌机从各个方向突击时,都小于,验证了模型的合理性。
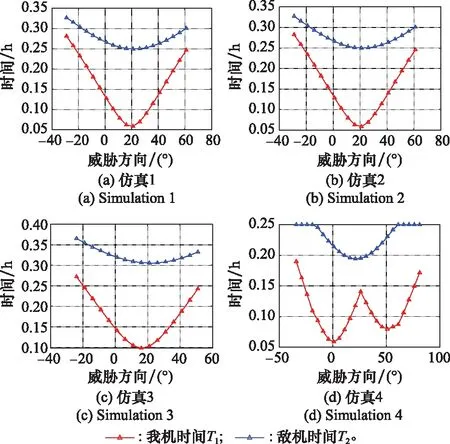
图19 T1和T2的比较Fig.19 Comparison of T1 and T2
仿真1到仿真4中,由于我机在警戒巡逻空域中的巡逻航线为“8”字型航线,故空域长边=35.2 km,短边=16.2 km。根据敌机的可能突防高度范围100~4 000 m,按照第3节的方法计算出空域的高度范围为0~7 950 m,进而完成完整的警戒巡逻空域规划。
5 结 论
警戒巡逻是典型的空中战斗活动之一,实施防御性制空截击作战时必须规划好警戒巡逻空域。本文立足任务空域规划实际,构建了完整的警戒巡逻空域规划模型,着重解决了以往警戒巡逻空域规划过程中受指挥员和空域规划人员主观因素影响大、空域规划科学性差、影响作战性能发挥等问题,得到的主要结论如下:
(1) 综合考虑我方兵力部署和敌机威胁,结合截击作战中我机从起飞到截击的整个流程,确定出截击线的位置,使截击线的设置更加合理可信。
(2) 评估敌机不同突击航线的威胁值,威胁值最大的方向即为警戒巡逻空域的方向,方向设置更有利于我方目标的安全。
(3) 在满足空域设置约束条件的前提下,根据我机采取的截击战术,明确了空域的可划设范围,在此范围内规划出空域的位置和数量,避免了规划过程中的盲目性,同时能够保证截击任务的完成。
(4) 考虑敌机可能的突击高度上下限,结合我机性能指标,确定出警戒巡逻空域的高度范围,进而建立了完整的警戒巡逻空域规划模型。模型灵活高效、可实施性强,对空域规划人员科学合理规划出警戒巡逻空域具有一定的借鉴意义。
