密集虚假运动目标生成方法
2022-05-07纪朋徽代大海邢世其冯德军
纪朋徽, 代大海, 邢世其, 冯德军
(国防科技大学电子科学学院, 湖南 长沙 410073)
0 引 言
合成孔径雷达(synthetic aperture radar,SAR)具有全天时、全天候和远距离成像的特点,这大大提升了SAR情报收集能力。多通道SAR地面运动目标指示(SAR ground moving target indication,SAR-GMTI)作为SAR在运动目标成像领域的拓展,能够利用其多通道特性,使用相位中心偏量天线(displaced phase center antenna, DPCA)技术在杂波中检测出运动目标,使用沿航迹干涉(along track interferometry, ATI)技术估计运动目标的径向速度并对其重新定位。因此,SAR和SAR-GMTI广泛应用在军事和民用遥感领域,如战场监视和城市交通检测等。特别是军事领域应用,对我方军事行动构成巨大威胁。因此,为了防止我方军事目标和重要军事设施被检测和成像,发展SAR-GMTI欺骗干扰技术具有重要意义。
现有对SAR-GMTI的欺骗干扰技术可以分为两类,即单干扰机欺骗干扰技术和多干扰机欺骗干扰技术。其中单干扰机欺骗干扰技术可以通过对静止干扰机生成的干扰信号进行多普勒调制或使用运动干扰机直接生成干扰信号来实现。在文献[21-22]中,作者提出了使用静止干扰机附加多普勒调制生成匀速运动和匀加速运动的虚假运动目标的方法,该方法生成的虚假运动目标能够在一定程度上实现对多通道SAR-GMTI的欺骗干扰,但容易经ATI重定位处理被鉴别为假目标,干扰作用有限。在文献[23]中,作者提出利用运动干扰机并结合散射波干扰技术生成欺骗多通道SAR-GMTI的虚假运动目标的方法,但是运动干扰机作用范围有限,并且不易实现。因此,单干扰机欺骗干扰技术事实上并不适合对抗多通道SAR-GMTI。而多干扰机欺骗干扰技术,基于电磁波干涉原理能够灵活控制合成干扰信号的相位变化,可在任意位置生成指定运动特性的虚假运动目标且不易被识别。在文献[24-25]中,作者提出了使用双干扰机并进行复系数调制生成对抗双通道SAR-GMTI的虚假运动目标干扰方法,该干扰方法生成的虚假目标能够对抗双通道SAR-GMTI处理。
上述提到的干扰方法虽然都能生成虚假运动目标,但主要聚焦于单个虚假点目标的生成。当它们被用来生成密集虚假运动目标时,仅仅是生成单个虚假目标过程的迭代,这样会面临计算量大、计算效率低的问题,并不满足电子战中对实时性的要求。因此,在文献[27-28]中,研究者们提出了密集虚假运动散射点目标的生成算法。虽然这些方法能够降低干扰机运算量,但要求所有的虚假散射点具有相同的运动特性,当干扰机生成密集不同运动特征的虚假运动点目标时,计算量依然很大。
基于对以上问题的分析,本文提出了一种新型的虚假运动目标快速生成算法,该算法在双干扰机生成对抗双通道SAR-GMTI虚假静止目标的基础上进行复系数调制,使其能被双通道SAR-GMTI系统检测为运动目标,且经ATI重定位处理后不易被识别,能够达到对抗双通道SAR-GMTI的目的;同时,结合现有的SAR大场景欺骗干扰技术,使干扰机生成密集且具有不同运动特性的虚假目标时,运算量大大降低。和现有的SAR-GMTI欺骗干扰方法相比,本文提出的干扰方法在生成密集不同运动特性的虚假运动目标时,计算量低,具备一定的工程可实现性。
1 对抗双通道SAR-GMTI的虚假静止目标生成原理
1.1 双通道SAR-GMTI欺骗干扰模型
如图1所示,双通道 SAR-GMTI系统在条带成像模式下工作。两幅接收天线沿航迹方向安装在飞机平台之上,平台飞行速度为,飞行高度为,其中天线发射SAR信号,两幅天线和同时接收目标回波。天线和之间的基线长度为,满足 DPCA处理条件,即=2,其中表示脉冲重复周期。表示合成孔径长度,为静止目标,位于(,,0)。此外两台干扰机和分别放置在坐标(0,,0)和(1,,0)处,地距位置相同。在慢时间=0时,SAR平台刚好运动到投影点为的位置,此时两幅天线和的坐标分别为(0,0,)和(,0,)。 ()表示目标和天线之间的瞬时距离,()表示干扰机和天线之间的瞬时斜距,其中=0,1和=0,1分别表示对天线和干扰机的索引。
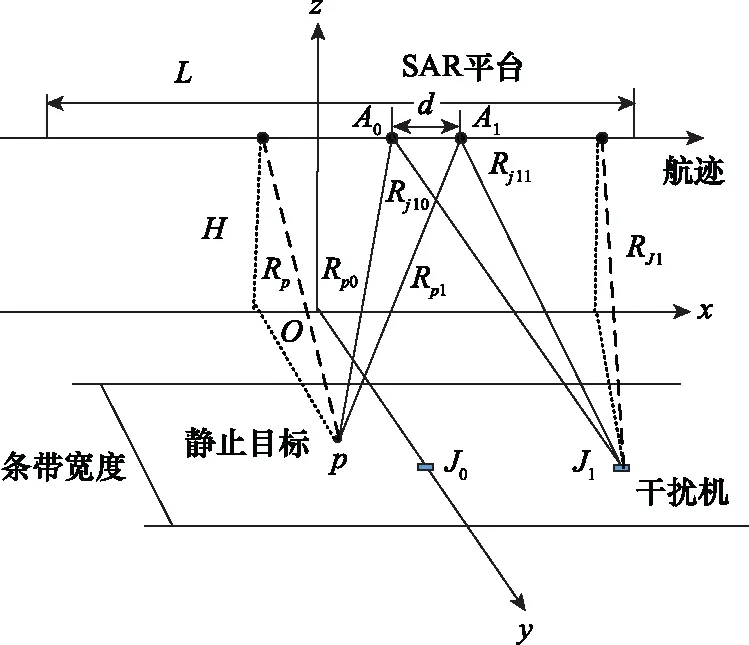
图1 双通道SAR-GMTI欺骗干扰模型Fig.1 Geometry of deceptive jamming against dual-channel SAR-GMTI
根据图1可知, 随着SAR平台的运动, ()和()可以表示为

(1)

(2)
定义0和1分别为干扰机和到航迹的最短距离,为静止目标到航迹的最短距离,则有

(3)

(4)
考虑到合成孔径长度和基线长度与成像距离比起来相当小,即,≪,,则 ()和()泰勒展开可表示为
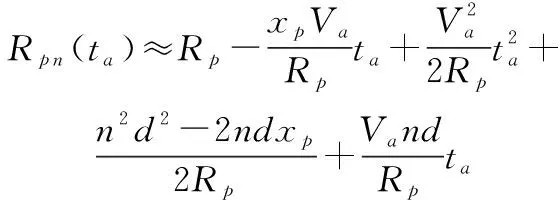
(5)

(6)
1.2 单干扰机生成虚假静止目标的局限性
假设SAR发射的信号为(,),则天线接收目标的回波可以写为
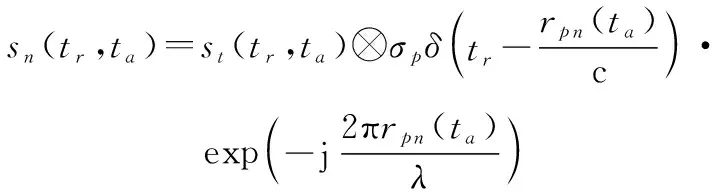
(7)
式中:
()= ()+ 0()
(8)
为目标的后向散射系数;⊗表示快时间向卷积调制因子;(·)为单位冲击响应函数;c表示光速;表示波长。
经过距离多普勒(range Doppler, RD)成像和成像配准后,目标在天线的成像结果可以写为

(9)
式中:为目标在图像域的幅度;为信号带宽;为多普勒带宽。
由于干扰机也可视为静止目标,则天线接收干扰机处的目标回波可以表示为
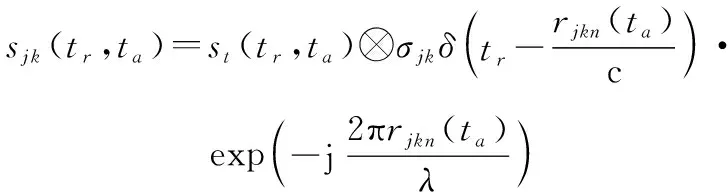
(10)
式中:
()=()+0()
(11)
为干扰机处的目标散射系数。
考虑任意一台干扰机生成虚假目标, 干扰机需要对截获的SAR信号进行延迟和相位调制。延迟和相位调制的量与天线到目标和干扰机的传播距离差Δ()有关,由式(1)和式(2)可知,Δ()为
Δ()≈2( 0()-0())
(12)
把式(5)和式(6)代入式(12),并考虑到≈,则Δ()近似为

(13)
相应地,天线接收干扰机发射的干扰信号可以表示为

(14)
然后,干扰信号经过RD成像和成像配准后,可得发射的干扰信号在天线中的成像结果为

(15)

(16)
式中:表示干扰机生成虚假目标在天线中成像后的幅度。根据式(15)可求得生成的干扰信号在两天线成像后的相位差为

(17)

(18)
因为静止场景的径向速度为零,所以SAR-GMTI能够基于两幅配准SAR图像使用DPCA技术来对消静止场景。现在,如果虚假静止目标的方位位置与干扰机不同,则虚假静止目标会被检测为具有一定速度的运动目标。因此单干扰机生成的虚假目标在对抗SAR-GMTI时与期望值不符。
1.3 基于双干扰机协同的虚假静止目标生成方法

考虑如图1所示的两台干扰机和同时生成干扰信号。每台干扰机生成的干扰信号成像结果已在式(15)中给出。假设两台干扰机完全一样,则每台干扰机生成的虚假目标幅度也将近似相等,不失一般性假设=。然后对每台干扰机在生成虚假目标时调制一个复系数,则在天线中,合成干扰信号的成像结果为
(,)=0(,)+1(,)=()
(19)
式中:

(20)
和分别表示干扰机和调制的复系数。如果式(20)恒为一常数,则合成干扰信号在天线中附加的相位可以忽略。观察式(20)可知,有一系列的复系数和满足其为一恒定常数。为了简化分析,假设其中一组复系数使其恒为1,则此时式(20)可以写为式(21)。然后把式(21)写成=的矩阵表达式,则有
(21)
式中:
求解式(22)给出的方程,可得出生成虚假目标时两干扰机调制的复调制系数。然后对两干扰机分别进行复系数调制,就能生成高逼真的虚假静止目标。此时基于DPCA处理技术,两天线之间的差图像为
=0(,)-1(,)=0
(22)

(23)
根据式(23)可知,虚假静止目标能够被对消掉。相应地,检测出的速度也为零,符合设定的期望值。因此,由双干扰机协同生成的虚假静止目标都能对抗双通道SAR-GMTI。
2 基于双干扰机协同的密集虚假运动目标生成方法
第13节给出了使用双干扰机并进行复系数调制,可以生成对抗双通道SAR-GMTI的虚假静止目标。其关键之处在于对干扰机进行复系数调制,从而能够控制合成干扰信号的相位使其在两幅天线的SAR图像之间的相位差为零,满足虚假静止目标特性。另外,也可从另一个角度进行考虑,如果改变干扰机调制的复系数,使其生成的干扰信号在两幅天线的SAR图像之间产生恒定的相位差,则此时生成的虚假目标在SAR-GMTI系统中就被检测为运动目标。据此,本文提出了一种新型的对抗SAR-GMTI的虚假运动目标生成方法,其本质是在双干扰机生成虚假静止目标的基础上进行复系数调制。
2.1 单个虚假运动目标生成原理


(24)

根据上述分析,可知生成虚假运动目标的关键过程是求取双干扰机调制的复系数,其简化的流程如图2所示,主要可以分为4步:
根据式(25),把虚假运动目标的初始位置映射到SAR图像中的对应位置;
根据式(18),计算虚假运动目标对应的两幅SAR图像之间的相位差;
基于式(20),建立系数矩阵方程;
求解系数矩阵方程,得到两干扰机调制的复系数。
把求出的复系数调制到干扰机生成的干扰信号上,就能生成期望得到的虚假运动目标。

(25)

图2 复调制系数获取简化流程Fig.2 Simplified flowchart of acquiring complex modulation coefficients
2.2 密集虚假运动目标生成算法
第21节给出了生成单个虚假运动目标的有效方法,然而对于密集虚假运动目标的生成,如果生成过程仅仅是单个的迭代,那么随着虚假目标数量的增加运算量将过于庞大,导致干扰机不能及时生成干扰信号。为此,本小节提出了一种密集虚假运动目标快速生成算法。
根据第21节介绍的单个虚假运动目标生成方法,可知干扰机调制的复系数等效于虚假目标的散射系数。因此可以把干扰机调制的复系数与虚假目标的散射系数结合起来形成新的散射系数,这样就可以利用现有的SAR大场景二维欺骗干扰方法来生成虚假运动目标,只是要求两干扰机协同工作。虽然对于每台干扰机生成的虚假目标是静止的,但两台干扰机联合作用,就能在两天线的SAR图像间产生相位差,从而使其能对抗DPCA对消处理并被ATI估计出径向速度,可以视为运动目标。这也是本文不使用文献[16]中提出的模拟虚假运动目标到天线的距离变化来生成运动目标,而提出新的方法的原因。因为文献[16]提出的干扰方法生成不同径向速度的虚假运动目标时,仅仅是单个过程的迭代,计算量太大,不满足干扰机实时生成干扰信号的要求。
一些现有的SAR大场景欺骗干扰方法可以结合本文所阐述的方法来快速生成密集虚假运动目标。本文使用文献[19]给出的方法,如式(26)所示,该方法把二维调制欺骗干扰模板分为慢时间独立部分Part2和慢时间非独立部分Part1。其中慢时间独立部分Part2可以离线计算,这样大量的计算可以离线完成,相应地提高了密集虚假运动目标的生成效率。由于如何对SAR实施大场景欺骗干扰并不是主要研究内容,本文不具体讨论该方法的细节,具体的实现过程可参考文献[19]。


(26)
假设要产生×个虚假运动目标,其中为方位向虚假运动目标点数,表示地距向虚假运动目标点数。定义虚假运动目标的径向速度模板为(,),散射系数欺骗模板为(,),则根据式(24)可计算出生成每个虚假点目标时干扰机调制的复调制系数模板(,),然后结合虚假运动目标的散射系数模板和复调制系数模板计算出虚假运动目标新的散射系数模板(,)=(,)·(,)。最后每台干扰机根据新的散射系数模板生成干扰信号,合成的干扰信号经SAR-GMTI处理后就能生成密集虚假运动目标。
3 仿真结果
本小节给出一些仿真结果来验证文中所提方法的有效性,干扰机干扰对象为一部双通道的SAR-GMTI机载雷达系统,主要参数如表1所示。

表1 双通道 SAR-GMTI系统参数
3.1 点目标仿真
为了验证本文所提方法在生成单个虚假点目标时的有效性,本次仿真实验中设置了4个点目标,,和,如图3所示;其中和是真实点目标,和为虚假点目标,它们的运动参数及初始位置如表2所示,可知和为静止目标,和为运动目标,表2中给出的指代表1中的成像场景中心。

图3 点目标分布Fig.3 Distribution of the point targets

表2 点目标初始位置及运动参数
为了生成单个虚假点目标,配置了两台干扰机和,将其分别放置在=(0,),=(30,)处。基于虚假运动点目标生成流程,应该先把虚假运动目标在真实场景中的位置映射到对应的SAR图像中。因此根据式(25)可知,的初始位置被映射到=(-44,+50)。此外,为了更好地验证本文所提方法的有效性,使用单干扰机生成虚假目标的方法用来做对比实验。
图4(a)和图4(b)分别给出了使用单干扰机和双干扰机生成的干扰信号的SAR成像结果,两幅图都显示出设定的4个点目标,圆圈代表目标在SAR图像中的位置。图4(c)和图4(d)分别为对应的DPCA处理结果,从图4(c)可以看出单干扰机生成的虚假静止目标没有像真实静止目标那样被对消掉,而是被检测为运动目标。不过图4(d)显示的双干扰机生成的虚假静止目标却被对消掉了,这说明本文提出的基于双干扰机协同的方法在生成单个虚假静止目标时是有效的。至于实验中所设置的运动目标,经DPCA处理后都被显示出来。

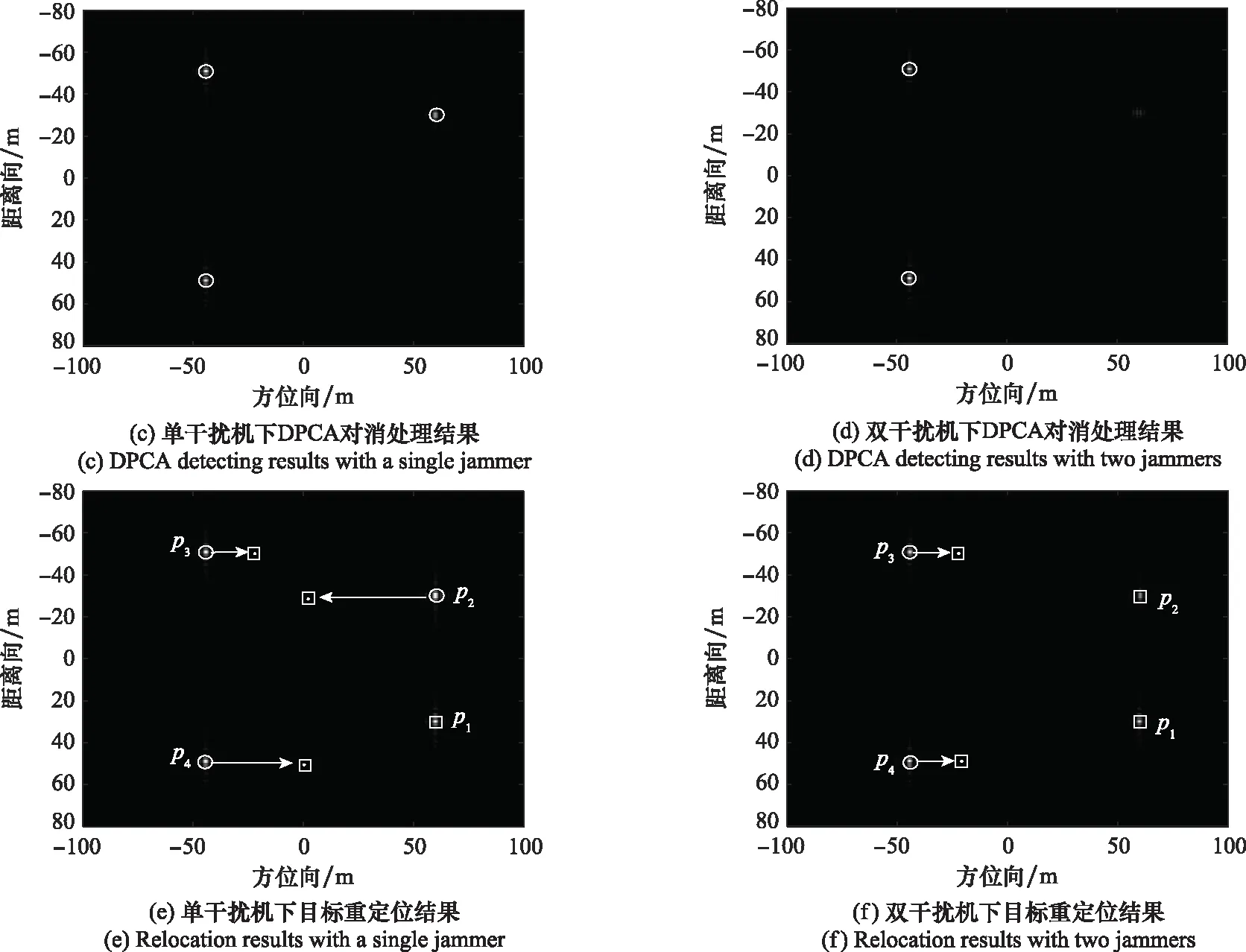
图4 点目标仿真结果Fig.4 Simulation of the point targets
当所有的运动目标经由DPCA处理检测出来后,使用ATI处理对每个检测出来的运动目标径向速度进行估计和方位位置重定位处理。表3给出了ATI操作后的处理结果。由表3可知,对于真实目标和,估计出的速度和重定位后的方位位置与其真实值相同,但是对于虚假目标和来讲,单干扰机生成的虚假目标径向速度估计和方位重定位后的位置与设定值比起来误差较大,而双干扰机生成的虚假目标误差在可接受的水平。图4(e)和图4(f)分别给出了两种干扰方法下的目标重定位结果,方框表示目标重定位后的位置,可以看出和图3相比,所有的真实目标都被定位到其设定的初始位置,而如图4(e)所示的单干扰机生成的所有虚假目标方位位置重定位后与干扰机相同,容易被鉴别出来;但图4(f)显示的双干扰机生成的虚假目标方位重定位后与其设定值相同。因此,本文所提双干扰机协同方法在生成单个虚假目标时是有效的。
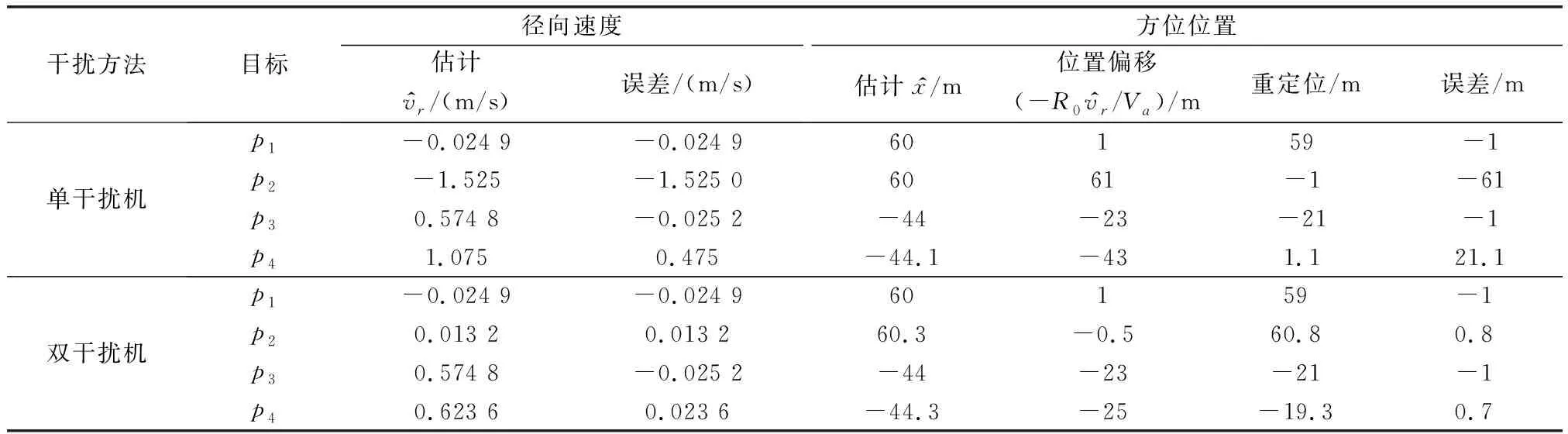
表3 不同干扰方法下虚假目标的径向速度估计和方位位置估计
3.2 密集虚假目标仿真
3.2.1 密集虚假目标生成
两组患者在护理前,焦虑评分差异无统计学意义(P>0.05)。在护理后,两组患者的焦虑评分均有所好转,但实验组的改善情况更好,两组数据t值检验后,差异有统计学意义(P=0.004 0)(如表1所示)。
在本次仿真实验中,为了验证文中所提双干扰机协同方法结合SAR大场景欺骗干扰技术生成密集虚假运动目标的有效性,设置了8个虚假运动点目标,8个点目标的分布如图5(a)所示,其初始坐标和运动参数如表4所示,其映射到SAR图像中的坐标也在表4中给出。双干扰机的配置与第3.1节中设置相同。根据图2描述的复调制系数获取过程,可以首先计算出对应8个虚假运动目标的干扰机复调制系数,结合目标的参考散射系数模板,可计算出对应的新散射系数模板,然后应用文献[19]给出的SAR大场景欺骗干扰快速算法,可快速生成所有的虚假运动目标。
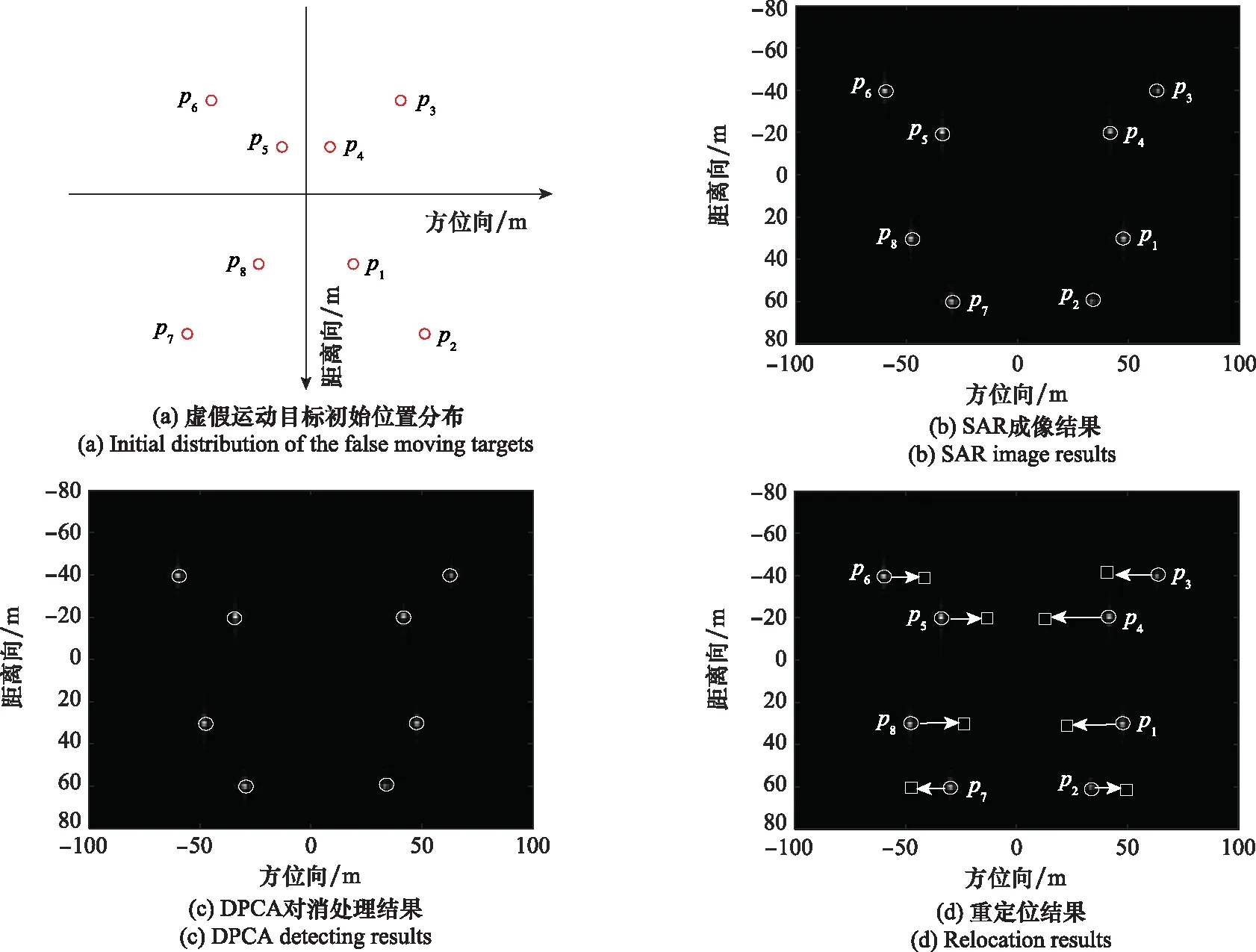
图5 密集虚假运动目标仿真Fig.5 Simulations of dense false moving targets

表4 虚假运动目标参数
图5(b)给出了包含全部8个虚假目标的SAR成像图。对应的DPCA处理结果如图5(c)所示,可以看出所有的虚假运动目标经DPCA处理后都被检测出来,圆圈代表目标在SAR图像中的位置。和图5(a)比起来, 图5(b)中所显示的运动目标方位位置都发生了偏离。表5给出了8个虚假点目标的径向速度和方位位置估计结果,可以看出所有虚假目标的估计结果与设定值基本相符。另外图5(d)给出了所有虚假目标的重定位结果,方框表示目标重定位后的位置,和图5(a)中虚假目标的分布一致。因此,本文所提双干扰机协同方法在生成对抗双通道SAR-GMTI的密集虚假运动目标时,依然有效。

表5 虚假运动目标的径向速度和方位位置估计
3.2.2 定位误差分析
观察表5可以发现,虚假目标的位置、径向速度的不同,最终造成的误差也是不同的。定位误差主要与虚假目标在SAR成像中的位置估计误差和径向速度估计误差有关。其中目标成像后在SAR图像中位置误差主要受成像算法和距离徙动校正算法的影响,考虑到按照表1设定的SAR-GMTI系统参数,目标的方位向分辨率约为1.7 m,对比表4和表5中虚假目标的映射坐标和实际在SAR图像中的位置估计可知,在未重定位之前对目标在SAR图像中位置估计可以近似认为是准确的。至于目标最终的定位误差,则主要是由生成的虚假目标径向速度估计误差造成的。为此,只需要考虑设定的虚假目标的位置、径向速度对虚假目标最终径向速度估计的影响。
图6给出了固定虚假目标在SAR图像中距离向位置=10 000 m和径向速度=-0.6 m/s时,目标的径向速度估计误差随虚假目标方位位置的变化情况。从图6中可以看出,方位位置对径向速度的估计较为随机,只是在=10 m、20 m时出现较大误差;由方位位置造成的速度估计误差普遍为0.03 m/s,由此造成的定位误差约为1.2 m,和方位分辨率1.7 m相比误差并不大,能达到对SAR-GMTI的欺骗目的。
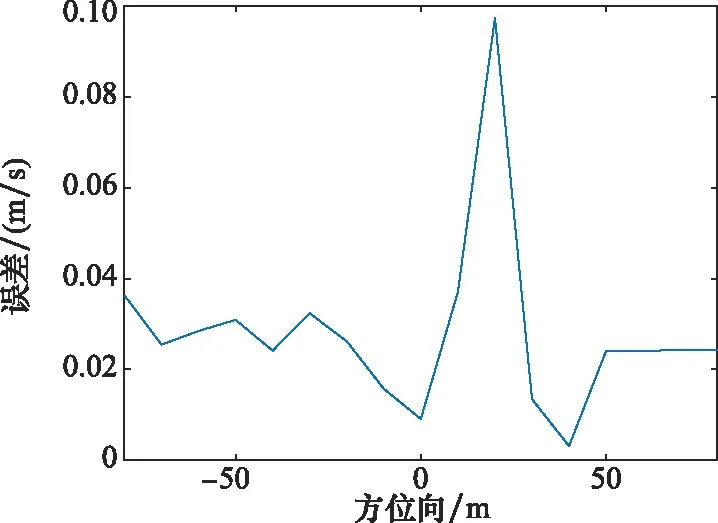
图6 速度估计误差随方位位置的变化Fig.6 Estimation error of velocity varing with the azimuth position
图7给出了固定虚假目标在SAR图像中方位向位置=-30 m和径向速度=-0.6 m/s时,目标的径向速度估计误差随虚假目标距离向位置的变化情况。从图7中可以看出,距离向位置对径向速度的估计也较为随机,造成的速度估计误差约为0.02 m/s,由此造成的定位误差约为0.8 m,和方位分辨率1.7 m相比误差也不大,同样能达到对SAR-GMTI的欺骗目的。

图7 速度估计误差随距离向位置的变化Fig.7 Estimation error of velocity varing with the range position
结合图6和图7分析可知,虚假目标的方位和距离向位置对速度估计的影响,主要是由成像算法和距离徙动校正方法造成的;另外,根据式(24)可知,进行系数求解时,调制系数受到虚假目标的方位位置的影响,进而会对目标的径向速度产生影响,这也是=10 m、20 m时出现较大误差的原因,因为此时目标刚好处于两干扰机之间,求解系数时,公式的系数矩阵接近奇异矩阵,故求解的系数误差较大,进而造成对目标的径向估计误差较大。
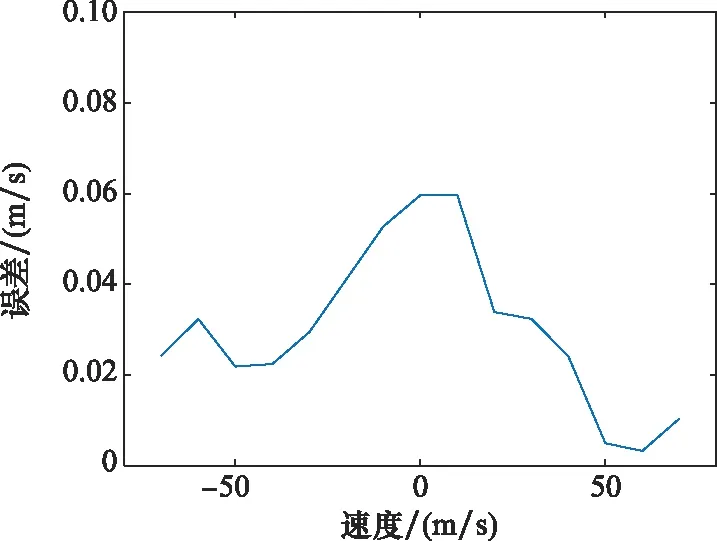
图8 速度估计误差随目标设定速度的变化Fig.8 Estimation error of velocity varing with the setting velocity
综上可知,虚假目标的定位误差受到多种因素的影响,但由表5可知最终的误差并不大,即使存在个别误差稍大的情况也能达到欺骗的目的。
虽然论文中选用的虚假目标初始位置为规则分布,但结合本小节的分析可知,虚假目标的径向速度估计和重定位误差受虚假目标初始位置的设定影响不大,因此即使为随机分布的目标,误差也不会大,同样可以实现对SAR-GMTI的欺骗干扰。
3.2.3 计算量对比
为了进一步说明文中提出的方法结合SAR场景欺骗干扰技术生成密集虚假运动目标的高效性,以下仿真对比了文中提出的密集虚假运动目标生成方法和文献[14]提出的方法生成密集虚假运动目标耗费的时间。分别把图5(a)的虚假运动目标在距离向上扩展为16个目标、32个目标,然后使用两种方法生成。
图9给出了16个、32个密集虚假运动目标的SAR成像图。表6给出了两种方法生密集虚假运动目标所耗时间。从表6可以看出,文中提出的方法耗时更短,因此文中提出的密集虚假运动目标生成方法效率更高。
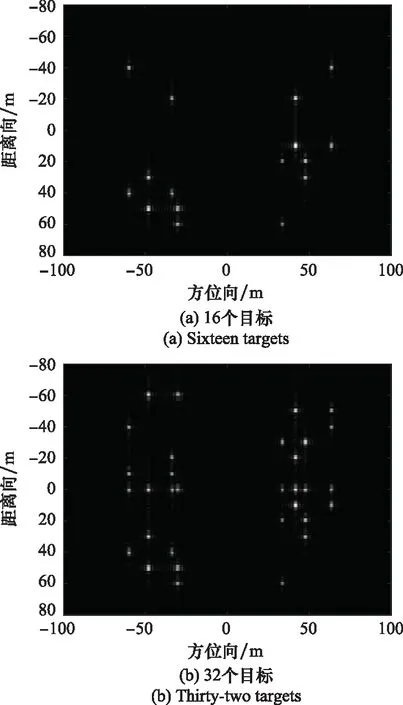
图9 密集虚假运动目标仿真Fig.9 Simulation of dense false moving targets

表6 不同干扰方法下耗时对比图
4 结 论
本文提出了一种新的对抗双通道SAR-GMTI的密集虚假运动目标生成算法。在本方法中,通过对双干扰机生成的虚假静止目标进行复系数调制,虚假目标就能被DPCA处理检测到,相应地会被SAR-GMTI系统认定为运动目标。同时,干扰机调制的复系数可以和虚假运动目标的散射系数结合起来,因此可以结合现有的SAR二维大场景欺骗干扰技术来快速生成密集虚假运动目标。使用本文提出的干扰方法,两台干扰机协作可以在短时间内像生成SAR欺骗大场景那样快速生成密集虚假运动目标。理论分析和仿真实验验证了本文所提方法的有效性。
