一种低姿态岸边集装箱起重机大梁平移精确控制方法
2022-05-06王君毅
王君毅 胡 石
上海振华重工(集团)股份有限公司
1 引言
低姿态平移式岸边集装箱起重机(以下简称岸桥)适用于一些对岸桥高度有严格限制的地区,虽然低姿态平移式岸桥现在并不是港口机械的主流产品,但其特殊的构造却也是岸桥未来可能的发展趋势之一。而其大梁平移能否快速精确到位,是其能否高效投入使用的关键。
2 大梁平移工况介绍
2.1 低姿态岸桥结构
新式低姿态岸桥的结构见图1,其平移结构由大梁、驱动机构、门框3部分组成。大梁包括具有平移结构的大梁总成,大梁总成上设有若干个固定的锚定坑,每个锚定坑的凹槽底部设有检测插销完全插入的限位,即插销下检测限位;驱动机构包括PLC控制器、驱动器、电机、卷筒,其中卷筒上的钢丝绳与大梁总成连接,电机通过转动卷筒钢丝绳拉动大梁总成前后平移;门框包括门框本体,本体上设有与固定锚定坑配合用于锚定大梁总成的液压插销,以及检测插销完全抬起的限位,即插销上检测限位。
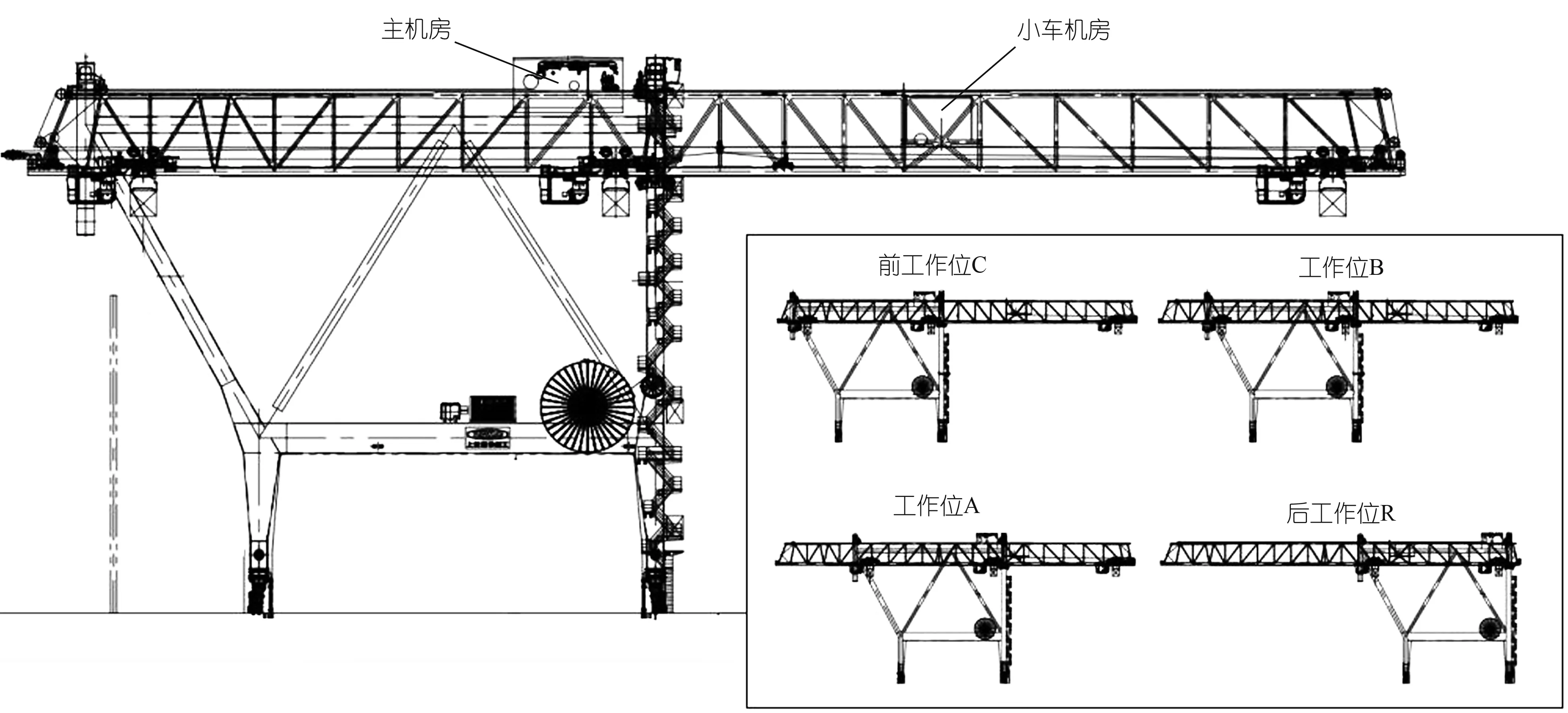
图1 低姿态岸桥结构以及4个工作位示意图
根据项目整体的要求以及相关的技术设定,可设置4个工作位,分别为工作位C位、工作位B位、工作位A位和工作位R位。每个工作位在大梁上都有对应的机械凹槽,可供海侧门框上的液压插销插入。岸桥开始作业时,大梁总成通过机房里的电机转动卷筒上的钢丝绳来拉动,使其向前向后平移,当大梁总成准确地平移到其中一个工作位后,插销插入大梁中的对应机械凹槽,锚定大梁到位后,岸桥才可以进行作业。
2.2 大梁平移难点分析
经过码头现场的长期调试和岸桥作业观察,发现大梁总成平移动作不同于常规项目的大梁俯仰动作,进行俯仰动作时钢丝绳都能保持在绷紧的状态,从而保证实际的运行位置与编码器读数值基本保持一致;但当大梁在水平方向平移时,往往会出现钢丝绳松弛的现象,导致实际位置与编码器读数产生较大的偏差,无法准确制动到位,进而影响大梁准确到达指定工作位。其产生的主要原因有2个方面:在长时间的运行后,大梁水平轮侧向间隙忽大忽小或者压轮的间隙变小,从而导致钢丝绳出现一会儿松,一会儿紧的状态[1];由于大梁总成长度很长,平移过程中无法保证钢丝绳一直处于绷紧状态。本项目岸桥大梁总成长度为109 m,比以往的低姿态平移式岸桥大梁总成都长,故要达到平移的精确控制尤为困难。
3 控制方法以及相关流程介绍
3.1 控制方法
首先,在大梁平移过程中,PLC控制器需要读取2个编码器反馈的大梁位置,一个由驱动器的增量编码器自行计算提供,可定义为BoomPositionFb;另一个由卷筒上的绝对值旋转编码器记录提供[2],这个值可定义为BoomPositionAbs。在平移过程中大梁实时读取增量编码提供的位置,用于速度反馈回路,驱动器根据其速度反馈来调整输出力矩,形成速度闭环控制回路;绝对值旋转编码器的数值则用来校对运行时的位置,保证在快速运行状态下大梁位置不会出现偏差,并确认到达工作位时是否停准。
其次,为了克服大梁钢丝绳松弛的不良现象,确保大梁锚定精准到位,要以限位的感应来最终确认大梁是否到位。在海侧门框上设置2个位置感应限位,统称为大梁位置限位,并在大梁每个工作位相应位置上放置感应支架(见图2)。在PLC程序里的软件停止设置可允许范围0.1 m,用2个大梁位置限位的感应与否来作为大梁是否准确到达指定工作位以及插销是否能落下的条件。
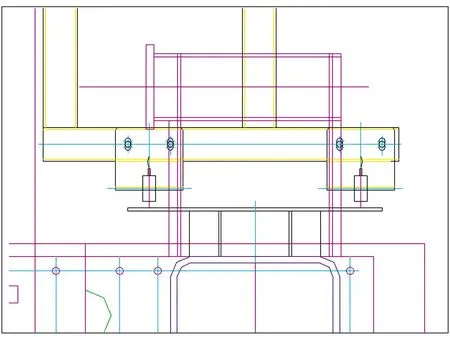
图2 大梁位置限位与其相关支架
此外,大梁在工作位C位时(即前停止)钢丝绳最容易松弛,而工作位R位(即后停止)则是大梁的停车位。这两个前后停止位置比较重要,应该额外在相应位置上设置前后停止感应限位2个,感应支架设在大梁上。当大梁总成平移到工作位C位或工作位R位时,将大梁前后停止限位位置调节成与大梁工作限位同时感应,这样就能进一步确保平移到这两个位置时的精准度。
最后,为了方便日后长期使用和维护,还要增加大梁位置的自动同步功能,即当大梁处在一个工作位时,将当前准确的大梁位置值赋给增量编码器BoomPositionFb和绝对值旋转编码器BoomPositionAbs,以确保PLC程序中大梁位置的准确性。建议选用大梁后停止的工作位R位。
3.2 具体流程
假设大梁在工作位R位,插销处于插入的状态。当PLC控制器给出指令去工作位A位时,首先插销向上抬起,在插销上检测限位感应后,电机开始转动卷筒,使卷筒上的钢丝绳拉动大梁,大梁全速运行时的速度为24.42 m/min。当大梁接近指定工作位置时,需要提前进行减速。经过反复计算和试验,发现大梁在到达工作位前的0.7 m时开始减速为最佳,应减速到原来速度的5%,即1.22 m/min,这样才能建立快速的制动力矩,制动效果显著,让大梁总成准确停止[3]。
此时考虑到钢丝绳拉动大梁时所产生的误差,在PLC中设置能够根据具体位置前后微动的程序,其大体逻辑为:若BoomPositionAbs小于工作位A位,大梁继续向前慢速平移;若BoomPositionAbs大于工作位A位,则大梁向后慢速平移;若BoomPositionAbs等于工作位A位,大梁停止平移。
停止后再检查相关的大梁位置感应限位是否感应,以此来判定插销是否能够插入大梁。若此时大梁位置感应限位已经感应到位,则使插销下降,当插销下检测限位感应时就认为整个大梁平移动作完成,岸桥可以投入作业。
此外在大梁整个平移过程中,BoomPositionFb和BoomPositionAbs这两个值需要不停进行比较,如果两者之间的误差超过0.3 m,则需要立刻减速,并在程序中把位置定义为无效化,并提醒操作人员去自动同步位归零。
4 结语
运用了此大梁平移控制方法的岸桥在实际投入码头作业后,大梁平移到位精确度高,故障率低,提高了岸桥的作业效率。该大梁平移的精确控制方法能在新式低姿态岸桥的设计、调试和作业中起到重要作用。