基于有限元法研究观览车旋转臂承载结构
2022-04-29李志毅
李志毅


摘要:文中在有限元ANSYS软件中建立典型观览车类游乐设施“时空穿梭”旋转臂的有限元参数化模型,合理地施加约束和荷载,分析旋转臂系统在满载工况、偏载工况、正常制动工况、极限工况下的受力情况,根据旋转臂在各工况下出现的最大应力对其结构进行强度、刚度校核,判定其安全系数是否满足 GB 8408-2018《大型游乐设施安全规范》标准要求,为后续的检验或安全评估提供指导性意见,同时为相似类型的游乐设施臂架系统提供设计借鉴。
关键词:有限元分析;旋转臂;强度;安全系数
Research on the Bearing Structure of the Rotating Arms of Wonder Wheel Rides Based on the Finite Element Method
LI Zhi-Yi
( Fujian Special Equipment Inspection and Research Institute, Fuzhou 350008, Fujian, China)
Abstract: In this paper, the finite element parametric model of the "space-time shuttle" rotating arm of the typical viewing vehicle amusement facility is established in the finite element ANSYS software, the constraints and loads are reasonably applied, and the force of the rotating arm system under the full load condition, the partial load condition, the normal braking condition and the limit condition are analyzed. According to the maximum stress of rotating arm structure under various working conditions, the strength and stiffness of the structure are proofread to determine whether its safety factor meets the requirements of GB8408-2008 standard. Its purpose is to provide guidance for subsequent inspection or safety assessment and reference for design of the similar types of amusements boom structure.
Key Words: Finite element analysis; Rotating arm; Stress; Safety factor
1 引言
观览车类游乐设施[1]是指乘人部分绕水平轴回转或摆动及运动形式类似的游乐设施。“时空穿梭”游乐设备为典型的固定式观览车类游乐设施。
“时空穿梭”游艺机主要由主塔、传动平台、旋转臂、座舱、站台和电控系统组成。其结构简图如图1所示。其工作原理为主电动机经联轴器传到减速机减速后,将动力传至旋转臂的回转支承齿上,带动旋转臂以一定的转速旋转,通过控制电动机的调向,来改变座舱的运动方向。
旋转臂是“时空穿梭”的主要承载部件,设备在运行过程中承受交变载荷,且存在应力集中的现象,应力集中部位容易出现疲劳破坏,降低回转臂的使用寿命,甚至会出现突然断裂的事故,对游客的生命安全构成严重威胁[2]。
该设备的旋转臂上方配有固定配重,通过配重轴与转臂进行连接;下方设置横吊杆,横吊杆与转臂通过吊挂轴连接,同时其下方悬挂4个双人座舱。故该旋转臂主要受力构件为转臂、横吊杆、吊挂轴、配重轴,其中配重轴仅在极限工况下进行校核。
2有限元分析
2.1 建模
以32座“时空穿梭”为计算对象,主体采用钢结构,整体框架材料为 Q235B(抗拉强度σb= 390MPa)。取钢材的弹性模量2.06×1011N/m2,钢材的密度7850kg/m3,泊松比0.3,采用SHELL181壳单元, 使用四边形为主的网格划分[3]建立回转臂的有限元模型。
旋转臂的永久载荷为臂架自重(代号GK,下同)满载时臂端乘坐32人(70kg/人,Q11),最大偏载时乘坐16人(Q12);当自重与离心力叠加时,座椅约束反力1098N(Q21),一般约束反力(Q22)按《大型游乐设施安全规范》6.1.2.3条的要求取500N[4]; 驱动力矩(T31)39795Nm,制动力矩(T32)63214Nm;离心力(Q5),最大离心加速度为0.7g;考虑两种风载荷:6级风(基本风压140Pa)为Q71,12级风(基本风压600Pa)为Q72;根据8度烈度计算(0.2g)地震载荷(T);冲击系数(K)取1.5[4]。
旋转臂的回转速度为9rpm,即角速度ω为0.942rad/s,回转臂中心与主塔上部机座之间施加旋转约束,旋转驱动载荷类型为旋转速度,回转臂稳定运行时的转速 0.942rad/s。
旋转臂带动座舱作旋转运动,是设备最重要的部件,故对其做了多种工况的分析。各工况的载荷组合如表1所示。
载荷与约束如图 2 所示。
2.2 计算结果
2.2.1 工况1
座舱旋转至最低点,此时乘客的自重与离心力叠加,受力最大。(当座舱旋转至最高点时,自重与离心力部分抵消,受力情况远好于最低点,此处不再赘述。)
按表1工况载荷组合,转臂中心与主塔上部机座之间施加旋转约束,旋转驱动载荷类型为旋转速度,转臂稳定运行时的转速 0.942 rad/s。整体施加1g的惯性加速度和6级风载。
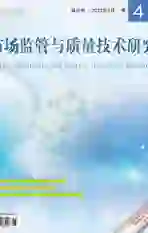
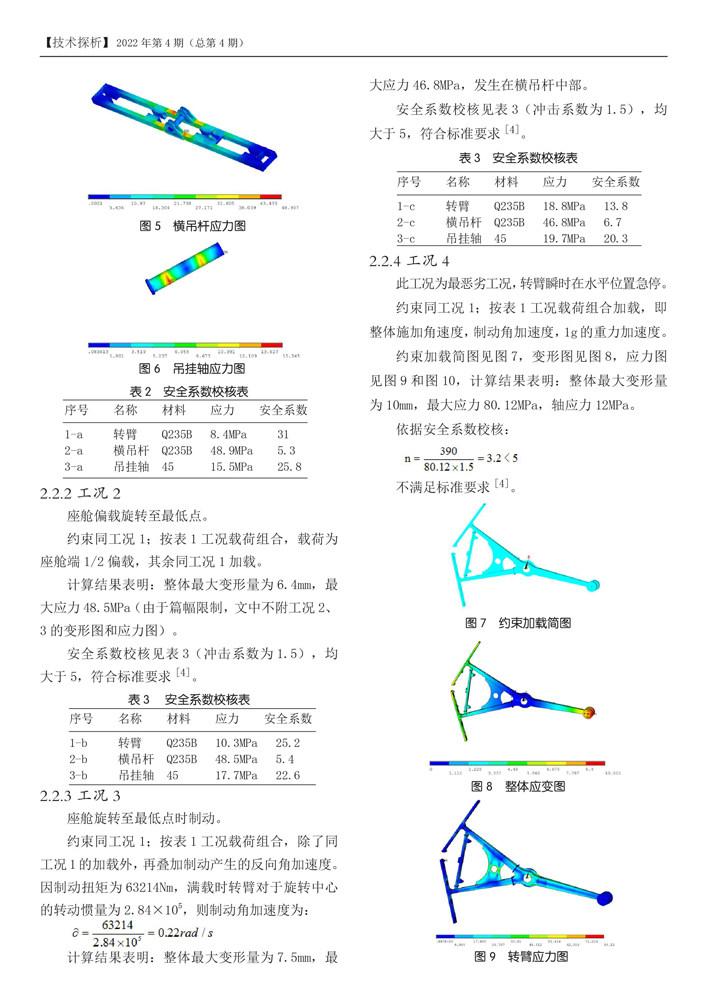
变形图如图3所示,应力图如图4到图6所示,结果表明:整体最大变形量为5.8mm,最大应力48.9MPa,发生在横吊杆中部。
安全系数校核见表2(冲击系数为1.5),均大于5,符合标准要求[4]。
2.2.2 工况2
座舱偏载旋转至最低点。
约束同工况1;按表1工况载荷组合,载荷为座舱端1/2偏载,其余同工况1加载。
计算结果表明:整体最大变形量为6.4mm,最大应力48.5MPa(由于篇幅限制,文中不附工况2、3的变形图和应力图)。
安全系数校核见表3(冲击系数为1.5),均大于5,符合标准要求[4]。
2.2.3 工况3
座舱旋转至最低点时制动。
约束同工况1;按表1工况载荷组合,除了同工况1的加载外,再叠加制动产生的反向角加速度。因制动扭矩为63214Nm,满载时转臂对于旋转中心的转动惯量为2.84×105,则制动角加速度为:
计算结果表明:整体最大变形量为7.5mm,最大应力46.8MPa,发生在横吊杆中部。
安全系数校核见表3(冲击系数为1.5),均大于5,符合标准要求[4]。
2.2.4 工况4
此工况为最恶劣工况,转臂瞬时在水平位置急停。
约束同工况1;按表1工况载荷组合加载,即整体施加角速度,制动角加速度,1g的重力加速度。
约束加载简图见图7,变形图见图8,应力图见图9和图10,计算结果表明:整体最大变形量为10mm,最大应力80.12MPa,轴应力12MPa。
2.2.5 配重轴
当配重端全速运行至最低点时,配重轴受力最恶劣。
参考前面的工况,将重力加速度反向,同时在旋转中心处施加角速度,得轴应力为25.3MPa(应力图见图11),材料为45#钢,抗拉强度600MPa,冲击系数1.5,则安全系数为:
3 结论及建议
文中以32座时空穿梭游乐设备为工程背景,运用有限元软件对其回转臂系统进行强度与刚度的校核,计算结果表明:
(1)回转臂在运行过程中受到交变应力作用,回转臂运行到水平位置急停时,回转臂根部受到较大的应力集中,虽然最大应力值未超过材料的屈服强度,构件不会发生屈服,但安全系数已不满足标准要求,制造厂家应注意该结构的强度设计。
(2)厂家提供的计算书(包括较多的参考文献)中所有构件的安全系数均按照GB 8408-2018《大型游乐设施安全规范》中一般构件的要求选取,为3.5,但从该标准对于一般构件的解释为“一般构件:运动部件(重要的传动轴除外),不直接涉及人身安全的轴、支撑臂、立柱、框架、桁架、轨道等构件”,结合该设备载人系统的连接结构分析,回转臂中转臂、横吊杆、吊挂轴、配重轴等均为直接涉及人身安全的构架,许用安全系数值选取3.5不符合标准要求;同时,上文提及的转臂、横吊杆中的焊缝均为Ⅰ级或Ⅱ级焊缝,按照等强度原则,许用安全系数值选取5符合标准要求。
(3)综合以上的计算结果,在定期检验无损检测方面,应重视臂架及横吊杆高应力区域的焊缝、吊挂轴及配重轴高应力部位的无损检测;同时也应关注臂架及横吊杆高应力区域的焊缝及母材的锈蚀情况、吊挂轴及配重轴的磨损情况,特别是横吊杆部分,因其计算安全系数接近于许用安全系数,更应给与足够的关注。
(4)鉴于以上结论,制造单位在结构优化改良符合强度要求时,应慎重考虑设备的设计使用年限,或提供严谨的疲劳校核报告,在日后投入使用中,建议使用单位定期进行应力等健康监测,确保设备安全运行。
参考文献
[1]游乐设施术语:GB/T 20306-2017[S].
[2]梁朝虎,秦平彦,林伟明,等.基于虚拟仿真的过山车轮架疲劳寿命分析[J].中国安全科学学报,2008(7):34-38.
[3] 赵九峰,基于 ANSYS 的高空飞翔卷筒强度分析[J].机械研究与应用,2018(6):30-31.
[4]大型游乐设施安全规范:GB 8408-2018[S].