无需大矢量三电平SVPWM在直接转矩控制系统中的应用*
2022-04-28谭风雷高世宇龚陈龙
谭风雷, 高世宇, 龚陈龙
(国网江苏省电力有限公司 超高压分公司, 江苏 南京 211102)
0 引 言
传统直接转矩控制(Direct Torque Control,DTC)[1-3]一般采用转矩和磁链双滞环控制,控制简单,动态响应快,鲁棒性好,缺点是转矩脉动大。文献[4-5]提出了基于模糊理论的直接转矩控制系统,该系统将模糊理论应用到直接转矩控制系统中,鲁棒性好,但转矩脉动仍较大。文献[6]提出了离散空间矢量调制(Discrete Space Vector Modulation,DSVM)方法,该方法将离散空间矢量调制技术与直接转矩控制技术相结合,有效降低了转矩脉动,但算法相对复杂。文献[7]提出了空间矢量脉冲宽度调制方法(Space Vector Pulse Width Modulation,SVPWM),该方法输出电流高度正弦化,转矩脉动低,具有较好的应用前景。目前一般采用两电平变换器,输出电压的电平数少,电流谐波含量较高,为了改善电能质量,采用二极管钳位型三电平变换器代替两电平变换器,同时为了有效减少直接转矩控制所产生的转矩脉动,采用三电平SVPWM调制方法和DTC技术相结合应用于电机控制中[8]。
关于三电平SVPWM调制方法,相关文献研究较多,理论也比较成熟,但中点电压平衡问题仍然值得研究。传统中点电压平衡控制方法一般采用合理分配成对小矢量作用时间的控制方法[9]。文献[10]提出了一种基于平衡因子的均压方法,该方法根据能量平衡原理,推导得到平衡系数,借助平衡系数来分配成对小矢量的作用时间。文献[11-15]考虑到中矢量将会引起二极管钳位型三电平换流器直流侧中点电压不平衡,一般是通过合理分配小矢量来实现中点电压平衡。因而,这些文献考虑将6个中矢量弃用,同时利用成对小矢量对中点电压作用相反,即可自动实现中点电压平衡,无需额外的均压控制方法,从而有效简化了算法复杂度。但是,实际上由于功率器件本身存在差异,如果没有额外的均匀控制方法,中点电压还是难以平衡。
基于上述分析,考虑到不能利用大矢量来消除中点电压的不平衡现象,在正常调制比范围内,又不会降低直流电压利用率,在保证直流电压利用率和控制效果的基础上,弃用空间矢量图中的6个大矢量,提出了一种无需大矢量三电平SVPWM控制方法,并将该控制方法应用到电机直接转矩控制系统中。
1 无需大矢量三电平SVPWM
三电平逆变器拓扑结构如图1所示。
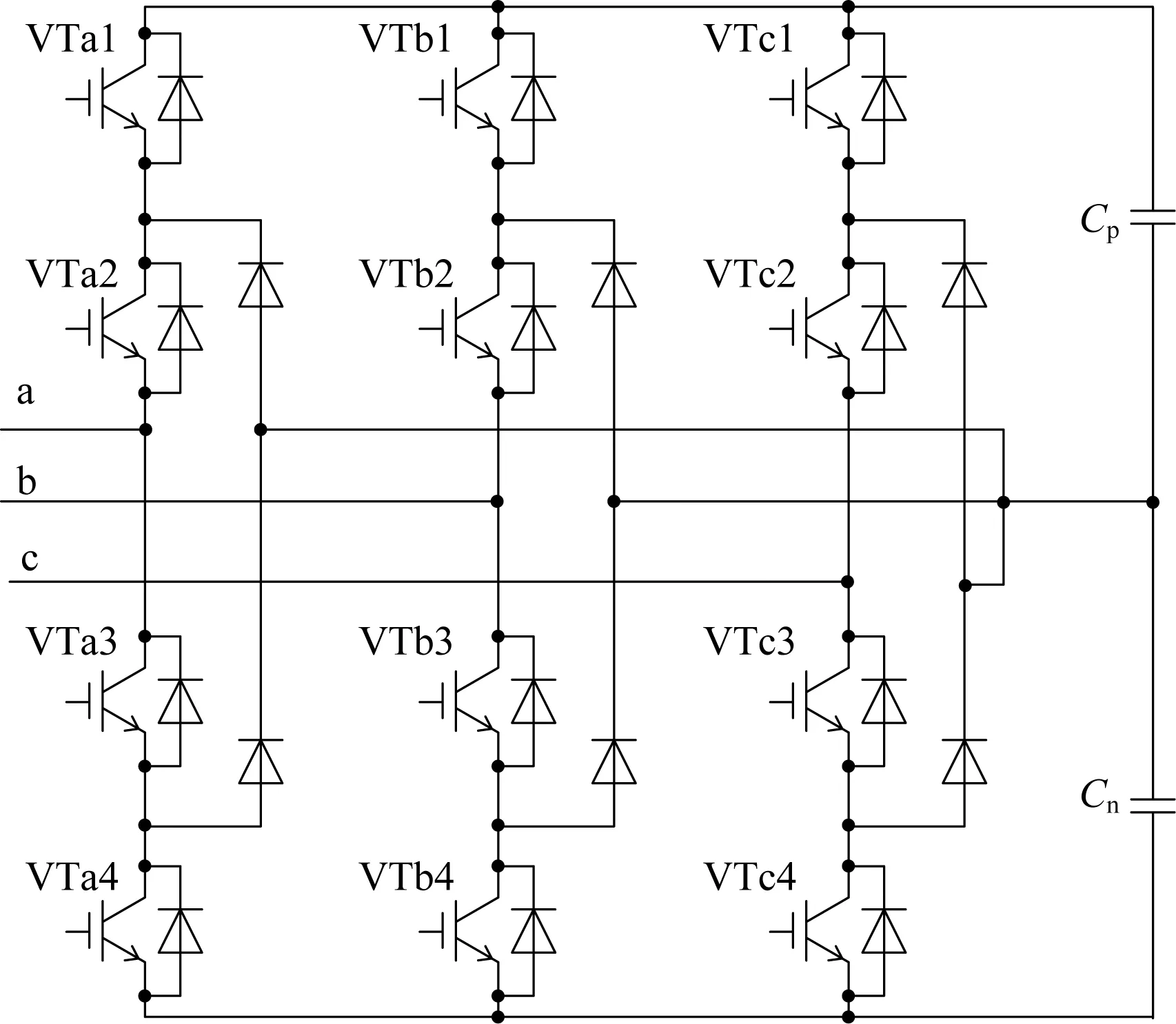
图1 三电平逆变器拓扑结构
包括3个桥臂和两个直流电容,每个桥臂有P、O和N共3种开关状态Sx(x=a、b、c),具体定义如下:
(1)
传统三电平SVPWM空间矢量如图2所示。图2中包括3个零矢量、12个小矢量、6个中矢量和6个大矢量,共计27个矢量,将矢量区域划分成6个大扇区和24个小区域,并通过合理安排开关序列来实现中点电压平衡,减少开关损耗。

图2 传统三电平SVPWM空间矢量
1.1 划分矢量区域
无需大矢量三电平SVPWM空间矢量区域划分如图3所示。相比于传统三电平SVPWM空间矢量图,无需大矢量三电平SVPWM弃用6个大矢量后,整个矢量空间被分成了6个大扇区,每个大扇区又分为3个小区域,从而构成了18个基本小区域,使得有效空间矢量从27减少为21,有效矢量区域从24减少为18。
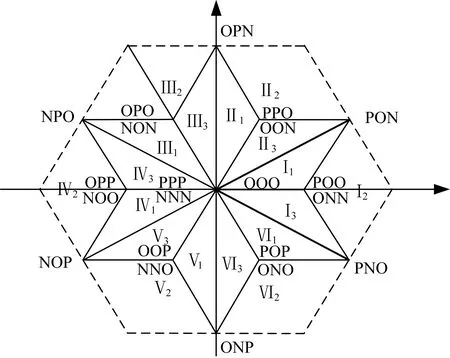
图3 无需大矢量三电平SVPWM空间矢量分区
1.2 合成参考电压
根据伏秒特性,参考电压矢量一般采用与其相邻最近的3个基本空间矢量来合成。第Ⅰ扇区参考电压矢量合成如图4所示。图4中Uref为参考电压矢量,UZ为零矢量,US1为小矢量。UM1和UM6为中矢量。下面以第Ⅰ扇区为例进行简要说明,第I扇区参考电压合成矢量如表1所示。
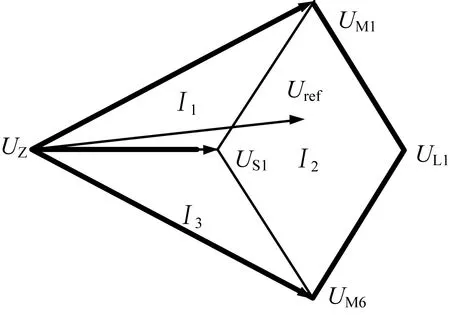
图4 第I扇区参考电压矢量合成

表1 第I扇区参考电压合成矢量
1.3 安排开关序列
合理安排开关序列可以实现两个目标:有效减少开关器件的动作次数,从而降低开关损耗;调整小矢量的分布,实现中点电压的平衡控制。开关序列的安排原则包括:有效降低开关损耗;保证每个开关作用时间相等;保证中性点电压平衡。
基于以上3个原则可以得到七段式开关序列分布,第Ⅰ扇区的开关序列分布如表2所示。

表2 第I扇区的开关序列分布
分析表1可知, 在一个开关周期里,与传统三电平SVPWM相比,有两相开关次数不变,一相开关次数增加一次,使得一个开关周期增加一次开关动作。假设开关频率为5 kHz,一个工频周期里,传统三电平SVPWM调制方法开关次数理论上为2 400次,无需大矢量三电平SVPWM调制方法开关次数理论上为3 200次,尽管开关损耗相对增大,但算法实现更加简单。
2 三电平SVPWM直接转矩控制系统
根据电机的基本原理,定子磁链ψs和电磁转矩Te可以表示为
(2)
式中:us——定子电压;
is——定子电流;
Rs——定子电阻;
np——极对数;
ψsd——定子磁链ψs在d轴上的分量;
ψsq——定子磁链ψs在q轴上的分量;
isd——定子电流is在d轴上的分量;
isq——定子电流is在q轴上的分量。
三电平SVPWM直接转矩控制系统结构如图5所示。
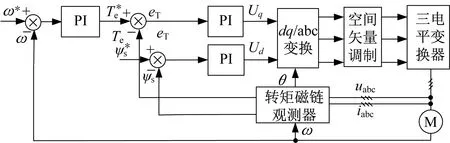
图5 三电平SVPWM直接转矩控制系统结构

3 仿真研究
为了验证本文所提出的无需大矢量三电平SVPWM算法的有效性和可行性,将其应用于电机直接转矩控制系统,在PSIM9.0中搭建仿真模型。仿真中电机为三相异步电动机,主要参数均来自仿真软件,仿真中电机参数如表3所示。三电平变换器采用二极管钳位型拓扑结构,直流侧电容总电压为600 V。为了验证该系统的动态性能,启动时转速目标值为500 r/min,0.25 s时转速目标值阶跃变化到1 000 r/min,同时对传统三电平SVPWM调制方法进行了仿真研究,便于控制性能的对比分析。
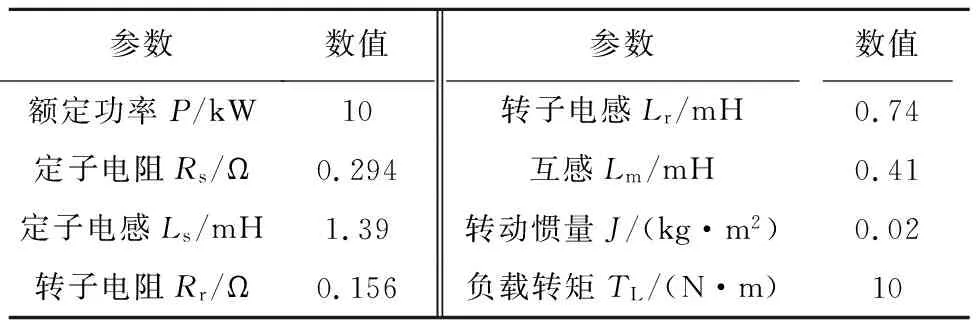
表3 仿真中电机参数
传统三电平SVPWM和无需大矢量三电平SVPWM直接转矩控制系统变换器输出波形分别如图6和图7所示。
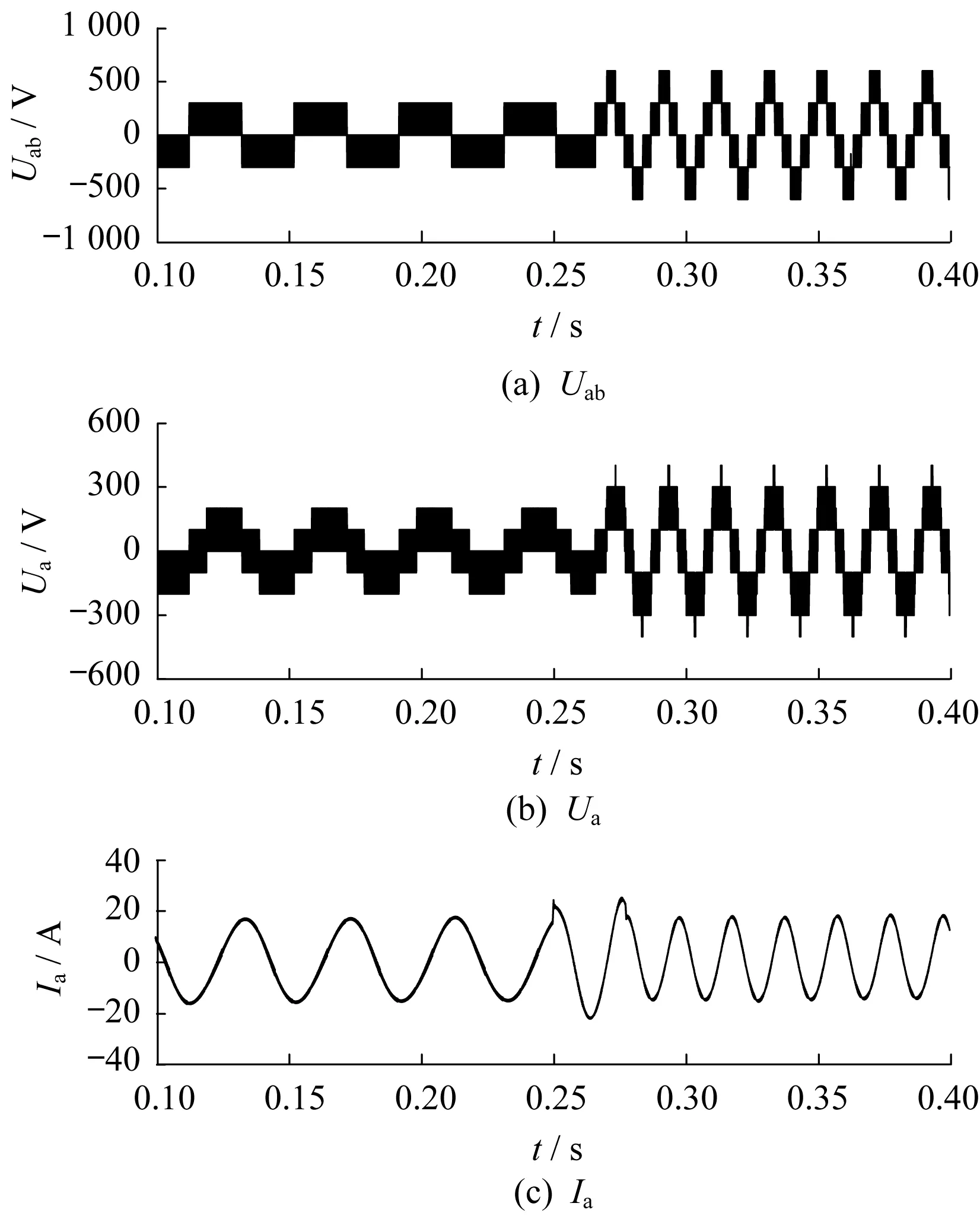
图6 传统三电平SVPWM直接转矩控制系统变换器输出波形

图7 无需大矢量三电平SVPWM直接转矩控制系统变换器输出波形
传统三电平SVPWM在转速为500 r/min时,参考电压调制比低,使得输出线电压波形为三电平,对应的相电压波形为五电平,输出电流频率为25 Hz,高度正弦化,但当转速阶跃变化为1 000 r/min时,参考电压调制比较大,输出线电压波形为五电平,对应的相电压波形为九电平,此时输出电流频率为50 Hz,畸变率低。无需大矢量三电平SVPWM由于无需大矢量,重新划分得到的大扇区和小区域的不同,使得不管参考电压调制比的大小,输出相电压波形为五电平,线电压波形为七电平,只是随着参考电压调制比不同,输出波形形状发生变化而已,对应的输出电流波形畸变率较低,控制效果好。
本文对比了传统三电平SVPWM和无需大矢量三电平SVPWM对应逆变器输出线电压的频谱,逆变器输出线电压频谱图如图8所示。
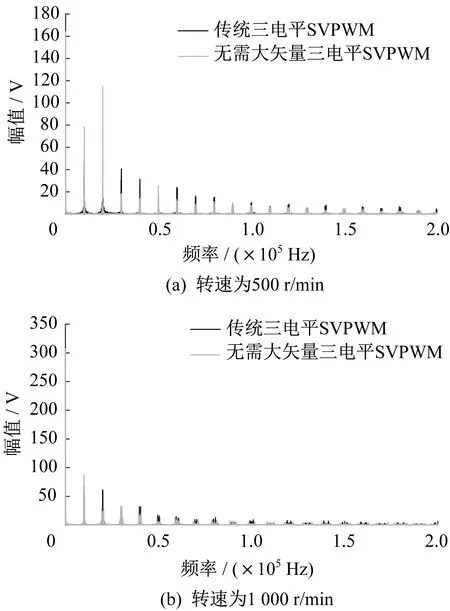
图8 逆变器输出线电压频谱图
显然当转速为500 r/min时,传统三电平SVPWM和无需大矢量三电平SVPWM输出线电压基波相同,其中传统三电平SVPWM的200倍和400倍频谐波要低于无需大矢量三电平SVPWM,而其他倍频谐波要高于无需大矢量三电平SVPWM,传统三电平SVPWM的相电压总畸变率为0.523,无需大矢量三电平SVPWM的相电压总畸变率为0.561;当转速为1 000 r/min时,传统三电平SVPWM和无需大矢量三电平SVPWM输出线电压基波相同,其中传统三电平SVPWM的200倍和600倍频谐波要低于无需大矢量三电平SVPWM,而其他倍频谐波要高于无需大矢量三电平SVPWM。传统三电平SVPWM的相电压总畸变率为0.258,无需大矢量三电平SVPWM的相电压总畸变率为0.285。总体而言,两种调制方法输出线电压的谐波畸变率基本相近。
本文又对比了传统三电平SVPWM和无需大矢量三电平SVPWM对应电机相电压的频谱,电机相电压频谱图如图9所示。
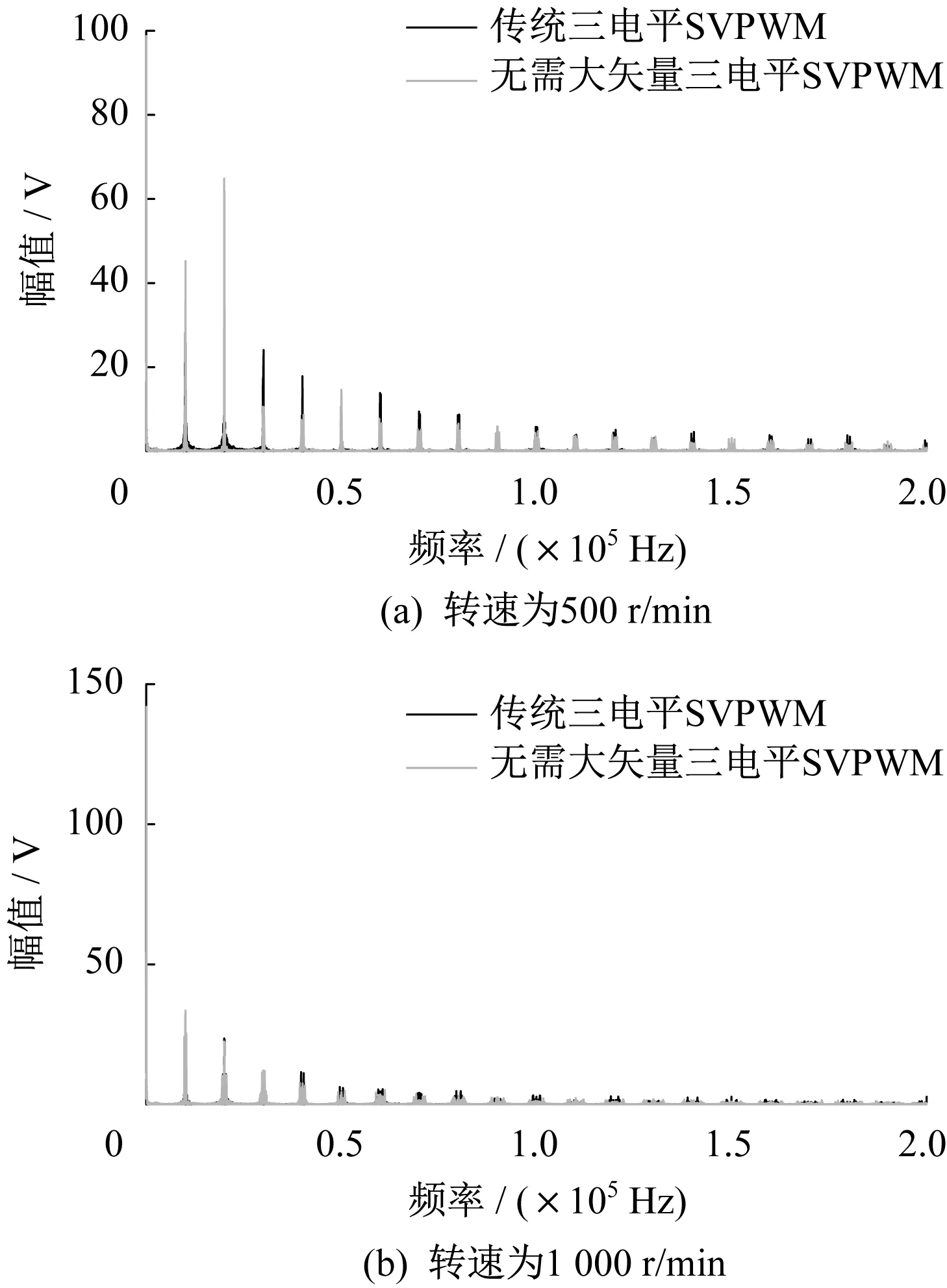
图9 电机相电压频谱图
显然当转速为500 r/min时,传统三电平SVPWM和无需大矢量三电平SVPWM电机相电压基波相同,其中传统三电平SVPWM的200倍和400倍频谐波要低于无需大矢量三电平SVPWM,而其他倍频谐波要高于无需大矢量三电平SVPWM,传统三电平SVPWM的相电压总畸变率为0.505,无需大矢量三电平SVPWM的相电压总畸变率为0.549;当转速为1 000 r/min时,传统三电平SVPWM和无需大矢量三电平SVPWM输出相电压基波相同,其中传统三电平SVPWM的200倍和600倍频谐波要低于无需大矢量三电平SVPWM,而其他倍频谐波要高于无需大矢量三电平SVPWM,传统三电平SVPWM的相电压总畸变率为0.252,无需大矢量三电平SVPWM的相电压总畸变率为0.293。
总体而言,两种调制方法输出相电压的谐波畸变率基本相近。因此,与传统三电平SVPWM相比,本文所提出方法对输出线电压和相电压的谐波畸变率影响较小,从而验证了方法的可行性。
传统三电平SVPWM和无需大矢量三电平SVPWM直接转矩控制系统电机相关参数波形分别如图10和图11所示。

图10 传统三电平SVPWM直接转矩控制系统电机相关参数波形
图11中0.25 s之前,电机稳定运行于500 r/min,电磁转矩在负载转矩附件波动,脉动小,对应的定子磁链在αβ坐标系下高度正弦化,表明稳态性能好。0.25 s时转速目标值阶跃变化到1 000 r/min,此时转矩增加,使得转速快速变化到目标值,对应的定子磁链幅值基本保持不变,但相角频率增加,大约0.02 s后,转速达到目标值,超调量较小,不到5‰,此时电磁转矩迅速变小,回到负载转矩左右变化,脉动较小,对应的定子磁链幅值仍为1,相角频率变为50 Hz,表明动态性能好。对比图10和图11可知,无需大矢量三电平SVPWM调制方法与传统三电平SVPWM调制方法对电机的控制效果十分相似,从而进一步验证了该方法的有效性和正确性。

图11 无需大矢量三电平SVPWM直接转矩控制系统电机相关参数波形
4 结 语
考虑到大矢量既不会消除直流侧中点电压的平衡,在线性调制比范围内又不会制约直流电压的利用率,提出了一种无需大矢量三电平SVPWM调制方法。该调制方法将6个大矢量弃用后,利用剩余零矢量、小矢量和中矢量将矢量空间划分为6个大扇区,每个大扇区又划分为3个小区域,形成了18个基本区域,分区减少,便于算法实现;将该调制方法应用到电机直接转矩控制系统中,与传统三电平SVPWM调制方法进行比较,控制效果相近,从验证了该方法的有效性和正确性。
