一种用于高龄老人的桌面进食护理机器人
2022-04-27李伟,樊宁
李 伟,樊 宁
(1.郑州工业应用技术学院机电工程学院,河南 郑州 451100;2.郑州工业应用技术学院艺术设计学院,河南 郑州 451100)
1 引言
“2019年底,我国65周岁及以上人口已达17603万人(约1.76亿)”[1]。进食困难的广泛存在大大影响了高龄老年人及其他残疾人的营养状况。在护理员每天的工作中,帮老人吃饭、喝水(占工作量的26.22%),加上定时喂药等是工作量较大、占用时间较长的护理工作[2]。在同一护理时刻,1名护理人员只能为1名服务对象提供护理,工作艰苦、任务繁重。对于大部分失能的高龄老年人和其他残疾人,提高生活质量与减轻护理工作量、缓解护理人力资源紧缺是我国养老事业面临较难解决的矛盾和社会发展必须要突破的瓶颈。
2 解决方案
基于工业机器人系统作为辅助康复护理的解决方案,国内外有较多应用产品。最具代表性的是“英国Mike Topping公司研发的Handy1”和有机器人王国之称的日本研发的“My Spoon”[3]。这类机器人主要帮助残疾人或者失能老年人进餐。资料表明,被赞誉为“世界上最成功的康复机器人Handy1现在有100多名残疾人经常在使用”[4]。要指出的是:全球范围的护理机器人产品受成本的高低、操作的复杂性、友好安全性乃至文化传统、风俗习惯等方面的影响和局限,并未得到广泛使用。当前,我国社会老龄化日益加剧,传统的孝道文化也要求政府和研究人员重视并加大研究力度,早日开发出适应大面积推广应的护理机器人产品。
随着人工智能的兴起,桌面机器人作为新产品逐渐开阔了人们的视野,“桌面机器人的概念是在近几年才被真正提出”[5]。科普教育是其目前主要发挥作用的领域。除了在机器人教育、培训、办公等行业有较多应用外,专门用于医疗、护理行业的研究工作已经逐步展开,且已成为国内外众多研究机构研究的热点,是机器人领域一个比较活跃的研究方向[6]。这里要特别强调:在桌面机器人架构基础上研究、开发护理机器人产品,可以为高龄老年人的日常饮食护理活动提供比早期餐饮、康复护理机机器人更为有效的解决方案。与传统的工业机械人存在操作复杂、身体笨重、体格庞大、成本高昂相比,桌面机器人基于开源平台设计,容易上手,操作和应用简单,轻量化,安全性好。事实上,用于高龄老人的桌面护理机器人,安全是在有人环境中获得广泛应用的关键所在。只有安全的护理机器人才具备使人机交互顺利开展的前提条件。本方案要解决操作的安全性和简易性,增强护理机器人产品在普通的日常生活中的可接受程度,更强调直接的护理使用体验,包括降低生产成本和运行维护成本。更具体的设计体现在下述结构和系统设计之中。
3 结构设计
首要考虑的关键是减小护理机器人的自重与负载能力的比值,追求能满足功能要求条件下的最小输入功率。如图1所示,与当前一般工业机器人的臂部构成方法不同,该护理机器人的大臂和小臂构成一种五连杆并联机构。这里强调对应的大臂和小臂的驱动轴并不重合,即具有两个不同轴的并联的肩关节。

图1 护理机器人大小臂结构简图Fig.1 Arm Structure Diagram of the Desktop Robot
采用这种并联五杆机构的机械臂能优化臂部受力情况、减轻臂部重量、提高臂部承载能力[7]。
特殊的五连杆并联机械臂为腕部俯仰驱动电动机与传动机构设计提供了非常有利的条件,结构原理,如图2所示。
图2 护理机器人大小臂与腕部结构简图Fig.2 Wrist Pitch and Arm Structure Diagram of the Desktop Robot
腕部处在小臂末端,靠腕部俯仰关节与小臂相连。动力由驱动电机4经双平行四边形机构CDEG和CFNM传递。腕部俯仰控制是护理机器人护理功能最重要的控制量之一,在大小臂移送食物或物品的中途过程要求腕部俯仰角保持水平固定,以免食物或物品溢出末端执行件(小匙)。
大小臂采用五连杆并联,再与腕部俯仰机构串联是令研发和使用者非常高兴和满意的创新设计,尤其适合护理机器人的减轻重量、减少电机功率、提高安全性的要求。采用Solidworks建立护理机器人的三维装配模型,如图3所示。不仅大臂和小臂的驱动电动机装在腰部机架上,而且机器人的腕部俯仰电动机也安装在腰部机架上,通过两个平行四边形机构作为传动件实现机器人的腕部俯仰运动。这样很有利于辅助进食作业。由于腕部俯仰只受腕部俯仰电机4控制,该电机不转时,腕部在世界坐标(绝对坐标)系的俯仰角度是不变的。即:如无论大臂和小臂如何运动,只要腕部电机转子不转动,末端执行件(小匙)能始终保持水平状态,满足进食过程中勺子内的进食物不洒出的要求。当深入容器(碗)中装进食物时,末端执行件(小匙)由腕部电机独立驱动进行俯仰控制,俯仰角不受大小臂运动的影响并可以与大、小臂、腰部电机4轴联动,操作和控制简单、便于应用。

图3 桌面护理机器人三维模型图Fig.3 3D Model Diagram of the Desktop Robot
4 系统设计
系统研发基于开源arduino平台。原因在于Arduino拥有大量的第三方资源,其开源特性和良好的兼容性使得使用者有大量的第三方资源可供选择。较高的易用性降低了嵌入式系统设计和开发的门槛,该平台的IDE环境可以提高系统设计开发效率[8]。由于是护理机器人需要多轴联动,采用比较容易控制的ar‐duino mega 2560进行程序设计。arduino mega 2560开发板相比于其他控制板不需要进行底层代码编写,利用互联网上稳定可靠的大量外围模块函数库,直接编写要运行的应用程序。URT-1集成了USB转串口芯片,结合线性低压差稳压电路可以将USB信号方便地转成5V或3V的串口信号电平。USB采用MINI的USB接口。由于电源端口有过流限制,最大6A,因此在本系统中控制4个伺服电机需要额外做供电分配处理。
桌面护理机器人大臂关节需要的驱动转矩最大,伺服动力优先考虑飞特SM40BL无刷串行总线磁编码伺服电机。这种伺服电动机采用12位高精度磁编码测量位置,集直流电机、伺服驱动、总线式通讯接口为一体的集成伺服单元,具有加速度反馈,速度反馈,位置反馈三闭环伺服控制,可以进行开放的PID参数调试,能实现平稳地加速启动和停止,如图4所示。
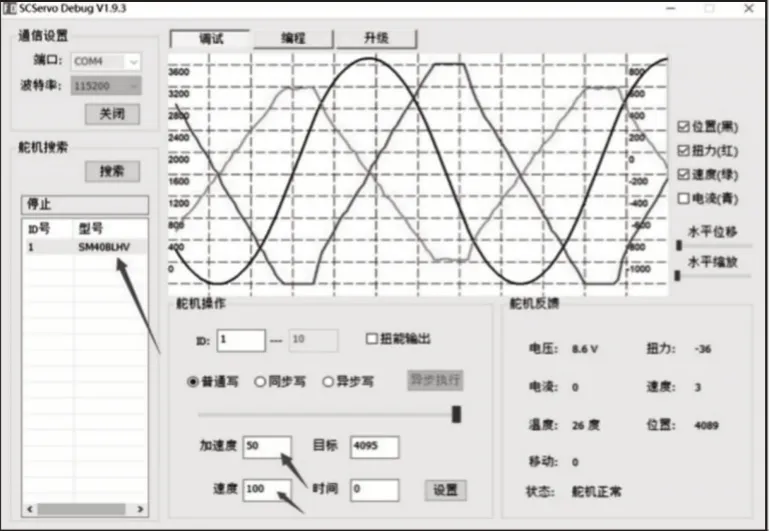
图4 闭环伺服系统调试Fig.4 Debugging of Closed Loop Servo System
系统具有过热保护,过载保护,过压保护,过流保护,通过软件可实时监控参数变化[9]。在设备运行时,动态监控数据变化,当内外部环境发生变化,如扭力超限,堵转,温度超限等,会触及保护机制启动,从而增加桌面护理机器人安全性并保护伺服电机本身。小臂、腕部和腰部(第4轴备用)选用SM30BL无刷串行总线磁编码伺服电机。与SM40BL一样,各关节伺服驱动电机具备串行总线接口,可以通过总线组成链型,每个伺服电机设定不同的节点地址,用异步串行接口统一控制。通过异步串行接口与系统通讯,根据需要和实际运行情况进行参数设置,包括波特率;0位误差校准;极限角度设置;极限扭力设置等。用串口总线发送指令可以单个电机独立控制,可分别设置为位置控制模式、恒调速电机模式与PWM输出模式。通过串口总线发送指令也可以多个伺服电机联动,即进行多坐标联动插补,以满足轨迹控制的需要,编程界面,如图5所示。
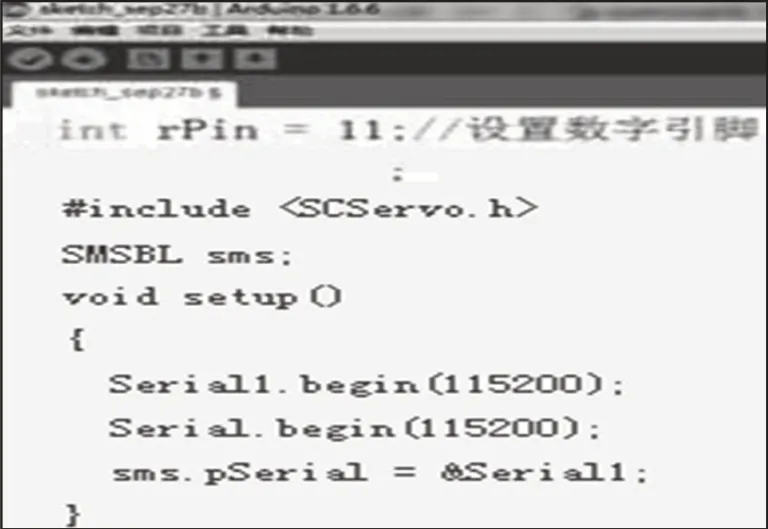
图5 编程界面Fig.5 Programming Interface
这样的串行总线控制布线极为简单,具有开机回中位功能,编程容易,能脱离上位机独立运行,方便实际应用。
5 应用验证
当前,国内失能老人有一部分采用放置胃管的方法维持营养。包括进食、喂水、服药等护理工作能有部分减轻,缓解护理人员缺乏的问题。但放置胃管会使消化道生理环境改变,容易使食道末端括约肌关闭不严甚至引起肺部感染[10]。对于还有吞咽功能的高龄老人,应尽量采用口腔进食。通过咀嚼和吞咽保持器官功能,也更容易消化吸收食物,有利于提高生活质量。因此,样机主要针对具有吞咽功能,但自己进食有困难、需要护理人员帮助的高龄老人和其他残疾人而设计、调试并投入应用,工作示意图,如图6所示。

图6 桌面护理机器人工作示意图Fig.6 Working Diagram of the Robot for Providing Diet Care
需要进食时:大、小臂和腕部联动使末端执行件小匙沿内壁插入到容器(碗)底部;下一步的动作主要是腕部的抬起,该动作也需要大小臂的辅助联动,使小匙保持容器(碗)中心向上运动至腕部水平;接下来最关键的是腕部电机保持不动,大小臂联动,使盛满进食物的小匙保持水平并沿直线向上,到达进食高度,水平前伸运动到入口进食点;然后延时等待传感器给出单次进食结束信号,回原位;循环至进食结束。初步使用表明:系统调试简单,操作友好,响应及时,运行稳定。主要工作过程可以为服务对象进行单独个性化设计。特别值得一提的是样机可以工作在一名护理员同时看管多台护理机器人的多机工作状态。即一个护理人员在同一时间采用多个桌面护理机器人为不同老人辅助进食。不同人的吃饭速度的差异也不会影响其他人,从而拥有更多的时间去细嚼慢咽,消化食物。大大节省护理人员的劳动,提高进食效果和护理效率。而且机器也比人更有耐心,不知疲倦,随时都可以保持正确的工作状态服务于高龄老人和其他有需要的残疾人。
6 结论
护理机器人技术的进步,特别是桌面机器人的发展使护理机器人做到高安全性、高准确度、高仿人类动作,能大大减少医护人员工作量和工作压力。这将是解决医护专业人员不足、提高被护理者特别是高龄老人生活质量的有效方法。还应看到,对于各种传染病人,包括新冠病毒感染者,用机器代替人能做到减少护理人员或被护理者与传染源的直接接触,降低交叉感染的可能性。期望这样的产品能早日广泛使用、推动我国养老事业的发展。
