非等间隔采样条件下卡尔曼滤波器设计与实现
2022-04-27罗利强张西平
杨 森 罗利强 高 剑 张西平
(西安电子工程研究所 西安 710100)
0 引言
卡尔曼滤波算法广泛应用于导航、通信等领域,该算法通过递推方式获得新的状态估计,实时获取估计信息,而不需要存储大量的历史信息。在雷达数据处理过程中,需利用当前时刻的量测信息来预测下一时间的估计信息,因此卡尔曼滤波算法在雷达数据处理中得到了广泛的应用。
在工程实际运用中,雷达采样间隔并不都是等周期的,此时若仍采用恒定的采样间隔进行计算,可能造成系统的初始状态和初始协方差的假设值偏差过大,导致滤波发散。为了克服非等间隔采样条件下跟踪精度不佳的问题,本文提出了一种非等间隔采样条件下卡尔曼滤波器设计与实现方法,该方法通过算式推导,从原理上获得了协方差的精确解,完成滤波迭代,不仅避免了由于协方差近似解造成的滤波发散的风险,而且可同时应用于非等间隔、等间隔采样条件下卡尔曼滤波器的设计与实现,且计算量没有明显变化,拓宽了已有滤波算法应用场合。
1 非等间隔采样条件下卡尔曼滤波器的设计
以三坐标雷达的数据处理问题为例,非等间隔采样条件下卡尔曼滤波器的设计包含以下两部分内容:一是非等间隔采样条件下滤波器参数的初始化;二是非等间隔采样条件下的滤波器迭代过程。其中,滤波器参数的初始化主要包括初始状态估计和初始协方差估计两个部分;滤波器迭代过程中,主要包括状态、协方差预测,量测预测,新息、增益等的计算,最终完成状态更新以及协方差更新。
1.1 非等间隔采样条件下滤波器参数初始化


(1)
其中,、、分别为极坐标系下距离、方位、俯仰的量测值。


(2)
式(2)中,为量测(0)与(1)的时间间隔,为量测(1)与(2)的时间间隔。
在直角坐标系下,时刻的量测噪声协方差()可表示为

(3)
式(3)中,为径向距离测量误差的方差,和分别为方位角和俯仰角测量误差的方差,而

(4)
初始协方差(2|2)为

(5)
式(5)中,、、、、、为分块矩阵,且

(=1,2,3;=1,2,3)
(6)
1.2 滤波器迭代
在完成滤波器初始化的基础上,利用后续更新量测,依次完成状态、协方差预测,量测预测,新息、增益等的计算,完成滤波器状态更新迭代。
在非等间隔采样条件下,滤波器迭代过程与等间隔采样条件下基本一致,其中,状态转移矩阵()、量测噪声的协方差(+1)以及过程噪声的协方差()的取值与时间间隔有关,因此在迭代过程中,需实时更新以上结果并代入。
离散时间系统的状态方程可表示为式(7)。
(+1)=()()+()()+()
(7)
量测方程可表示为
(+1)=(+1)(+1)+(+1)
(8)
状态的一步预测为

(9)
量测的预测为

(10)
新息表示为式(11)。

(11)
协方差的一步预测为
(+1|)=()(|)′()+()
(12)
量测的新息协方差表示为
(+1)=(+1)(+1|)·
′(+1)+(+1)
(13)
增益为
(+1)=(+1|)·
′(+1)(+1)
(14)
可得状态更新方程和协方差更新方程为

(15)
(+1|+1)=(+1|)-
(+1)(+1)′(+1)
(16)
卡尔曼滤波流程图如图1所示。

图1 卡尔曼滤波流程图
2 性能验证
2.1 仿真分析
1)场景设置
模拟运动目标在空间做等高匀加速运动,初始速度为200m/s、加速度为1m/s,飞行高度1500m;雷达测距精度70m,测角精度(方位角、俯仰角)均为03°,采样点数取100;雷达工作在扇扫工作模式(扇扫周期为2s),此时相邻两次扫描到同一目标的时间间隔不同,其中第一、二个扫描时刻的时间间隔约为15s,第二、三个扫描时刻的时间间隔约为05s。
2)非等间隔采样条件
采用文中提出的方法,在滤波迭代过程中,实时更新采样间隔,即实时代入=15s、=05s。其中一次仿真结果的示意图如图2所示。

图2 真实轨迹、观测轨迹与滤波估计
500次蒙特卡洛仿真条件下,距离、方位角和俯仰角误差的精度曲线如图3至图5所示。
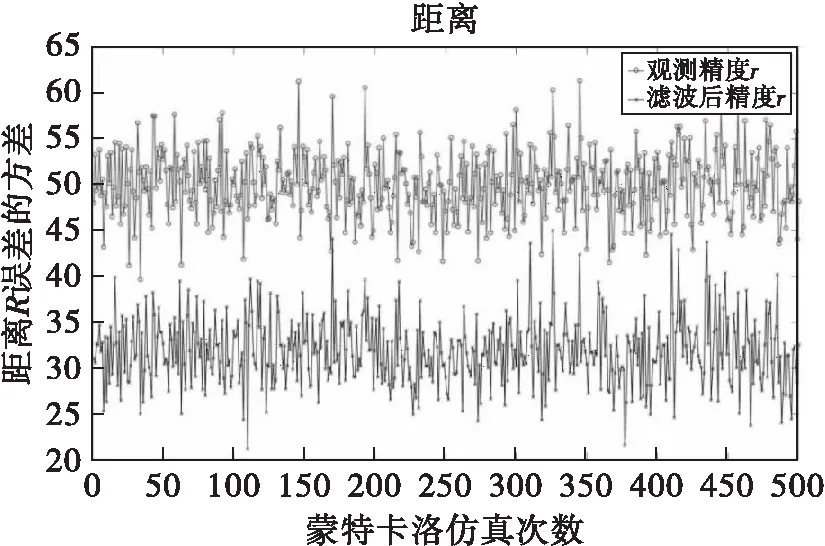
图3 距离误差的精度曲线

图4 方位角误差的精度曲线

图5 俯仰角误差的精度曲线
在仿真过程中,测距精度为50m,测角精度均为0.3°。对500次蒙特卡洛仿真结果求均值,距离精度为31.9045m,方位角精度为0.1747°,俯仰角精度为0.1812°。
3)等间隔采样条件
采用等间隔采样卡尔曼滤波器作为对比,在滤波迭代过程中,用扇扫周期的一半近似表示采样间隔,即T=T=1s。
500次蒙特卡洛仿真条件下,距离、方位角和俯仰角误差的精度曲线如图6至图8所示。

图6 距离误差的精度曲线

图7 方位角误差的精度曲线

图8 俯仰角误差的精度曲线
对500次蒙特卡洛仿真结果求均值,距离精度为56.8797m,方位角精度为0.1750°,俯仰角精度为0.1817°。
2.2 实测结果
两种模式下误差的精度对比结果如表1所示。

表1 两种滤波方式结果对比
非等间隔采样条件下(=1.5s,=0.5s)进行迭代滤波,距离、方位角和俯仰角误差的精度与预设值相比均变小,符合工程实际运用要求。观察采样间隔==1s时滤波结果,可以看出,虽然方位角、俯仰角的滤波效果与前者基本持平,但是距离的滤波效果不佳,甚至出现滤波精度不如观测精度的现象。
3 结束语
本文提出了一种非等间隔采样条件下卡尔曼滤波器设计与实现方法,该方法在非等间隔采样条件下完成滤波器参数初始化以及滤波器迭代,在计算量没有明显增加的情况下,滤波结果精度更高,算法有效性和可靠性高,且易于实现,具有一定的工程应用价值。