海况识别下的船舶航速动态优化方法
2022-04-26王壮王凯黄连忠陈峻陈伟南
王壮, 王凯, 黄连忠, 陈峻, 陈伟南
(1.上海交通大学 海洋工程国家重点实验室, 上海 200240;2.大连海事大学 轮机工程学院,辽宁 大连 116026;3.上海中远海运液化天然气投资有限公司, 上海 200080)
全球能源消耗的日益增加对交通运输行业节能减排提出了新的挑战,航运不但消耗了大量的燃油,而且排放的温室气体占全球排放总量的2.6%[1]。为提高船舶能效,国际海事组织[2]先后颁布了相关法规。例如,船舶能效设计指数、船舶能效管理计划、船舶能效营运指数。一般来讲,提高船舶能效水平可从单船、船队和船舶设计建造3个角度去考虑。对于营运中的单船来讲,航速是影响船舶能效的主要因素之一[3-4]。优化船舶航速,使主机运行在高效区,是实现航运业节能减排的有效手段。为选择合适的航速,研究人员提出了多种优化方法。NORSTAD 等[5]提出以航速为决策变量的不定期船舶航速优化调度方法;CORBETT等[6]应用利润最大化方程求取目标航线上最佳经济航速;LINDSTAD等[7]研究了降速航行对CO2排放量和海上运输成本的影响。海况的变化可使船舶受到的阻力和螺旋桨产生的推进力变化,从而影响船舶航速和主机燃油消耗[8-9]。文献[10-11]针对多变的内河通航环境对内河船舶航速进行动态优化。相比内河运输,远洋运输具有航程长、海况变化剧烈的特点。海况对船舶能效的影响更加明显。LI 等[12]考虑海况对船舶失速的影响,建立航速优化方法,此方法可为航速的决策提供参考;SUN等[13]为降低船舶能效营运指数,建立了以海况、主机转速为输入,油耗率和航速为输出的动态优化方法,但仅仅考虑4组海况,不能实现考虑海况的整条航线上的航速优化,具有一定的局限性;YANG等[14]考虑洋流的影响,区分船舶对水航速和对地航速,提出了一种固定船舶航速的优化方法。
本文提出通过识别航线上的海况类别,优化船舶航速提高船舶的能效水平。以实船历史数据为基础,采用K-means聚类算法建立海况类别知识库,通过K-近邻分类算法实现了对海况的识别,基于海况的识别结果动态优化船舶航速。
1 基于海况识别的航线分段模型
船舶在开航前,将船舶的海况预报信息、物理转向点信息、航线信息输入到航线分段模型当中,通过海况的识别可将目标优化航线分成航向单一、海况类似的航段。将划分好的航段输入到船舶航速动态优化方法中,然后输入船舶参数、装载、航程、航行时间和主机转速约束信息实现船舶航速优化。此外,海况信息定期更新,将更新的数据再次输入到此流程中,便可实现航速动态优化。船舶航速动态优化流程如图1所示。
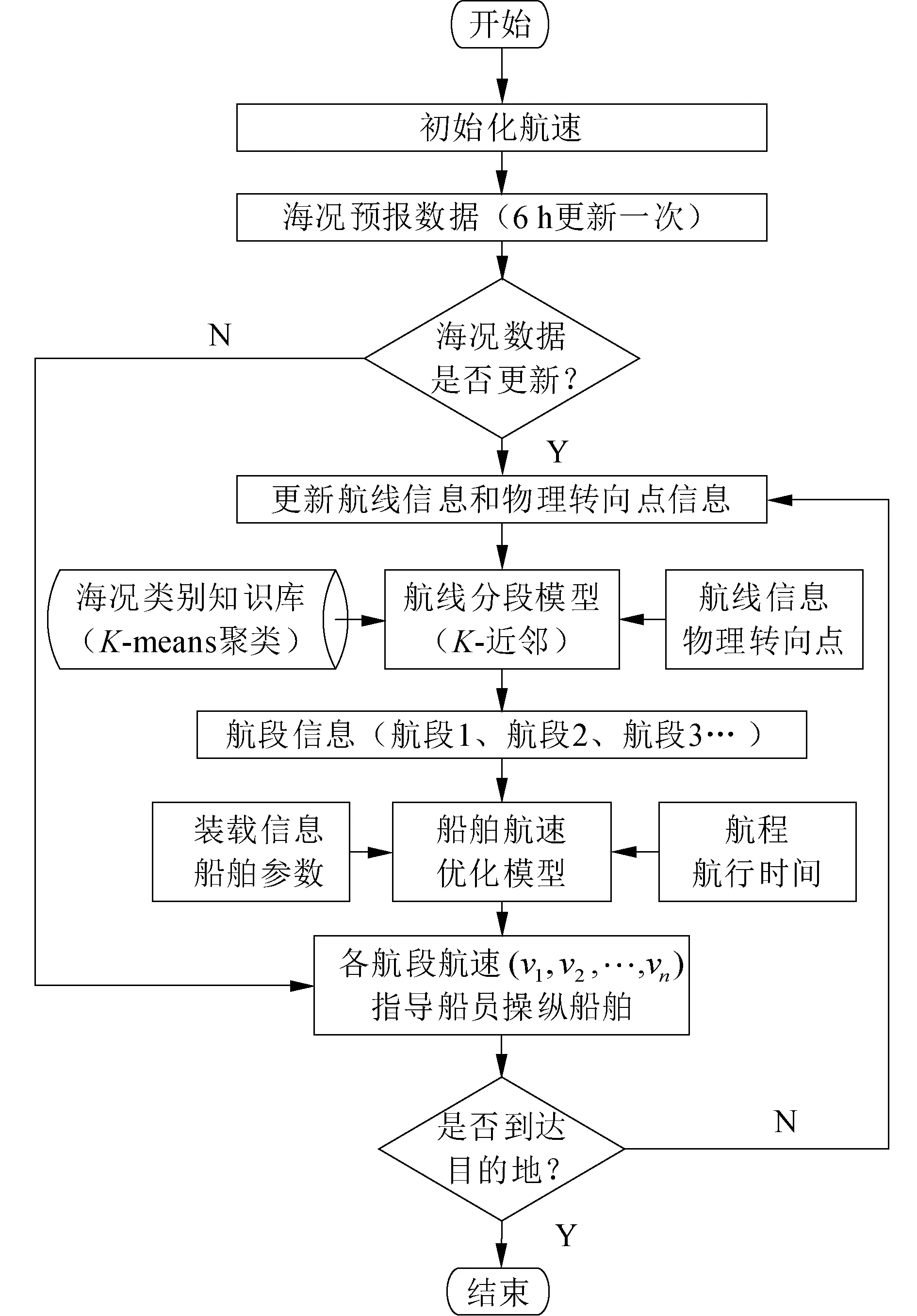
图1 船舶航速动态优化流程
根据海况预报信息将航线分成海况类似的航段是进行航速动态优化的基础和前提。所以需要建立航线分段模型。
1.1 建立海况数据库
建立海况类别知识库需要大量的海况数据。本文选取中国到巴西的定航线30万吨级散货船“宇中海”号作为研究对象,提取相关数据。目标船船长327 m,型宽55 m,设计吃水21.4 m,推进系统为单机单桨直接传动推进型式。
提取2017-2019年间目标船在定航线上14个满载航次的数据。其中定航线上海况特征属性中的风速、风向、特征波高数据通过欧洲中期天气预报中心下载得到。流速、流向数据通过目标船上计程仪对水航速和GPS采集的船舶对地航速和航向矢量叠加得到。将提取的海况数据按照时间序列整理形成海况数据库。数据的总量为85 000条,时间间隔为10 min。风向为56°,流速0.02 m/s及流向264°情况下海况数据库部分数据如表1所示。
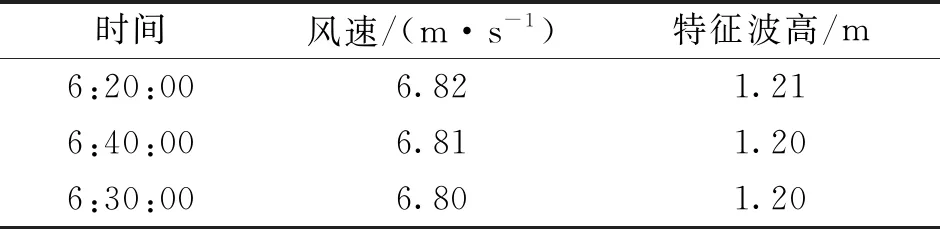
表1 海况数据库部分数据
1.2 建立海况类别知识库
为准确把握目标优化航线上的海况类别,需要建立准确的海况类别知识库。海况类别知识库作为海况识别的训练样本。根据所建立的海况数据库,用K-means聚类算法建立海况类别知识库。该算法的优点是应用广泛、速度快、鲁棒性强[15]。其步骤为:
1)随机选取K个海况数据作为聚类中心(c1,c2,…,ck);
2)计算样本xi和聚类中心的距离,找出距离聚类中心最近的海况数据cv,那么xi和cv属于同一类:
(1)
式中l代表样本xi的特征属性;
3)计算当前类别所有样本的中心点作为新的聚类中心:
(2)
4)计算收敛函数,直到聚类中心和E值不发生变化。否则转到第2步迭代:
(3)
根据上述K-means聚类算法步骤,利用手肘法选取最佳的K值为16,建立了海况类别知识库。表2是海况类别知识库的聚类中心数据。

表2 海况类别知识库聚类中心数据
1.3 海况识别方法及准确率验证
识别目标优化航线上的海况可将目标优化航线分成海况类似的航段,船舶在此航段内航行,航向、航速不变。根据已知的目标优化航线信息和物理转向点信息可将目标优化航线分成航向单一的航段。为实现将航向单一航段分成海况类似的航段,采用K-近邻分类算法[16]对海况识别并通过训练样本验证识别的准确率。K-近邻分类算法步骤为:
1)选取训练样本集合X;
2)初始化K值;
3)计算K个训练样本xk和待分类样本xq的距离:
(4)
式中l为xq与xk的特征属性。
4)给定一个待分类样本xq。x1,x2,…,xk表示与xq最近的K个训练样本。设分类问题的目标函数为f,vi是第i个类别的标签,那么标签集合可定义为V={v1,v2,…,vi}。估算f(xi)相应为:
(5)


K-近邻分类算法准确率验证。随机抽取3份已经分好类的海况数据作为测试样本。每份数据为1 000组,验证K-近邻分类算法对海况类别识别的准确率。K取96,每组测试结果如表3所示。通过表3可知该算法的识别准确率约为99%,识别准确率较高。

表3 K-近邻识别准确率测试结果
1.4 海况识别前后航线分段对比
为展示海况识别后的航线分段效果,选取目标船从好望角到巽他海峡的一段作为目标识别航线,途径印度洋,航线上的海况已知。用所建立的海况类别知识库作为训练样本对目标识别航线的海况进行识别,如图2所示。此方法能够将目标识别航线分成海况类似的航段。

图2 海况识别结果
2 船舶动力系统建模
针对目标船单机单桨直接传动推进型式,通过船、机、桨的能量传递关系搭建船舶动力系统模型。此模型可根据船舶的航速、船舶参数、装载情况、识别后的海况信息计算得到目标船主机的燃油消耗量。
1)船舶阻力模型。
船舶在海洋中航行受到静水阻力R0、空气阻力Ra、波浪增阻Raw、流阻ΔRD。所以船舶总阻力R为:
R=R0+Ra+Raw+ΔRD
(6)
其中静水阻力为:

(7)
式中:Cap、Cf、Cr、ΔCf分别代表船舶的附体阻力系数、摩擦阻力系数、剩余阻力系数、粗糙度补偿系数;v为船舶航速,kn;SS为湿表面积,m2;ρ为海水密度,kg/m3。
空气阻力为:
(8)
式中:Ca为空气阻力系数、ρa为空气密度,kg/m3;At为船体水面以上部分在中横剖面上的投影,m2;Va为相对风速,m/s。
波浪增阻为:
Raw=0.64ζA2B2Cbρg/L
(9)
式中:ζA、B、Cb、ρ、L分别代表特征波高、型宽、方形系数、海水密度、船长。
海流对舵的阻力增额估算为:

(10)
式中:Ar为舵面积,m2;A0为展弦比;δ为舵角,(°);v为航速,kn;ω为伴流系数;s为滑失比。
2)螺旋桨模型。
船舶在海上某一工况下稳定航行时,存在一个确定的螺旋桨进程系数J对应一个确定的推力系数KT和转矩系数KQ[17]。根据船舶航速计算螺旋桨进程系数J为:
(11)
式中:v、ω分别代表船舶航速、伴流分数;np为螺旋桨转速,r/min。
船舶在定航向、航速航行过程中,可认为船舶处于一个准静态的平衡状态。即螺旋桨的有效推力和船舶的总阻力相等。根据螺旋桨有效推力的计算式可求解螺旋桨转速为:
(12)
式中:t、KT分别代表螺旋桨推力减额分数、推力系数;D为螺旋桨直径,m。
螺旋桨扭矩Qp为:
Qp=KQρnp2D5
(13)
螺旋桨吸收的功率Pp为:
(14)
3)主机模型。
主机转速的计算式为:
(15)
式中:i为减速箱传动比;ne为主机转速,r/min。
根据轴系传递效率η计算主机功率Pe为:
(16)
4)燃油消耗量。
通过建立船舶主机燃油消耗率和主机转速、功率的数据库插值得到主机燃油消耗率ge。
主机燃油消耗量Q为:
Q=gePeT
(17)
式中:Pe为主机功率,kW;T为航行时间,h。
3 船舶航速动态优化方法及验证
建立航速动态优化模型可实现对航速的动态优化,得到不同航段的最佳航速。航速动态优化模型需要确定优化目标,优化变量和优化算法。为验证优化模型的效果,采用实船案例进行分析验证。
3.1 航速动态优化方法
由于遗传算法具有良好的全局搜索能力[18],所以本文选取遗传算法作为优化算法。该算法的计算流程如图3所示。
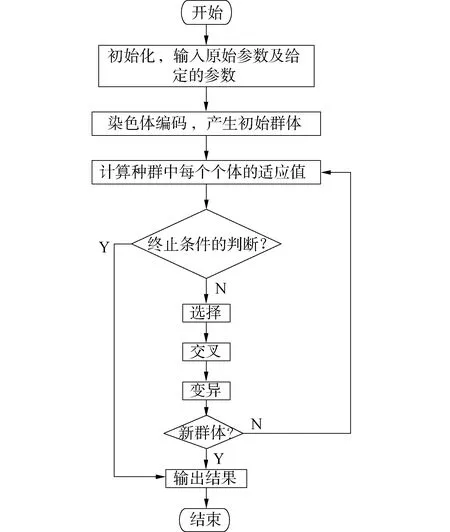
图3 遗传算法计算流程
1)目标函数。
船舶在不同的航段下的航速是优化的自变量。对于各个航段来说,要建立各个航段燃油消耗量和航速的函数关系。本文基于所建立的航段主机动态油耗模型,在不同的海况下遍历7~15 kn、步长0.1 kn下的航速,得到了各个海况下81组航速和主机油耗量数据。将2组数据通过Matlab中的ployfit函数进行二次拟合得到不同海况下的主机燃油消耗量和航速的函数关系。整个航程的总油耗和各个航段航速的数学关系为目标函数。计算整个航程的总油耗为:
QTotal=f(v1,v2,v3,…,vn)·10-6=

(18)
式中:QTotal为航程总油耗,t;v1、v2、v3、…、vn为各航段航速,kn;gew为主机燃油消耗率,g/(kw·h);Pew为主机功率,kw;Tw为航段航行时间,h。
2)约束条件。
航程约束,优化后船舶航行的总航程L0和各航段的航程L总和一致。随着船舶的航行,其航程约束也在动态地变化为:
(19)
时间约束,航行总时间T0不能超过各个航段航行时间和。随着船舶的航行,其时间约束也在动态地变化为:
(20)
主机转速约束,转速值不能高于额定转速同时也不能低于主机最小安全转速:
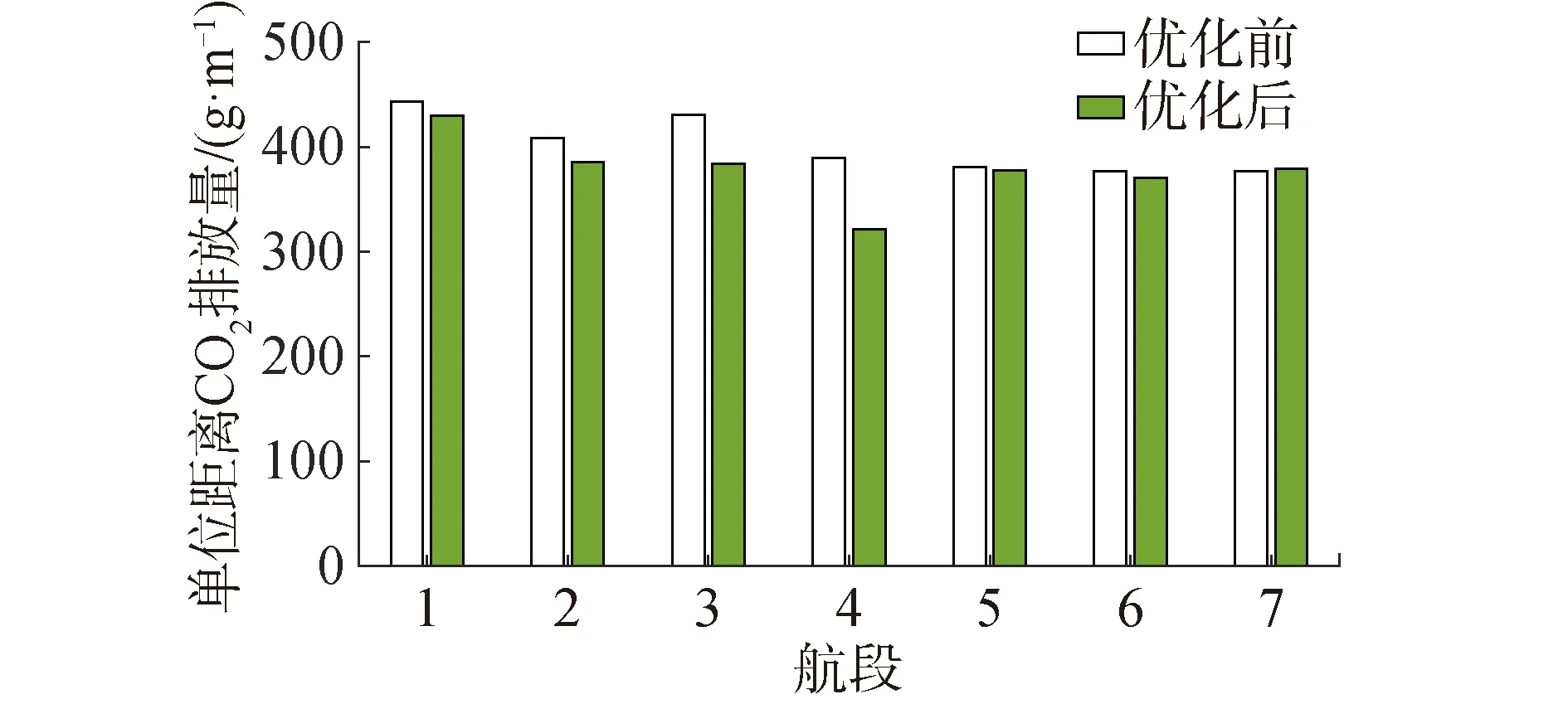
nmin (21) 选取目标船2017年满载状况下从巴西圣路易斯到非洲好望角的一段作为目标优化航线,途径大西洋。首先对目标优化航线基于海况识别进行划分航段,然后进行航段主机动态油耗模型可行性的验证,最后进行航速优化并和优化前的主机燃油消耗量和排放量进行对比。 1)航线分段。 将海况预报信息、航线信息和物理转向点信息输入到航线分段模型中,结果如图4所示。图中不同的颜色和数字对应海况类别知识库中不同的海况,目标船在不同海况中的航速分别为:v1、v2、…、v7。 图4 航线分段结果 2)航段主机动态油耗模型验证。 将航段上船舶的航速、船舶参数、装载情况、识别后的海况信息输入到船舶动力系统模型中得到动力系统动态油耗计算模型。为了验证所建立的航段主机动态油耗模型的准确性,利用实船能效数据验证模型的误差,实船参数值如表4。将目标船在目标优化航段上的航速代入航段主机动态油耗模型中,计算各个航段的燃油消耗量,然后和实际船舶在各个航段的燃油消耗量进行比较,结果如图5所示。 表4 实船参数表 由图5可知,模型计算的燃油消耗量与各个航段的实际燃油消耗量基本相当,误差均在4%以内,说明本文建立的动力系统油耗模型合理。 图5 航段主机动态油耗模型验证结果 3)航速优化。 将各个航段的航速v1、v2、…、v7代入到所建立的油耗模型中。遍历航速,拟合各航段燃油消耗量和航速的二次函数关系,得到目标函数的多项式为: (22) 式中:ai、bi、ci代表各航段主机燃油消耗量和航速的拟合参数,具体如表5所示。 表5 各航段主机燃油消耗量与航速的拟合参数 根据本实例的具体参数得知,约束条件为:航程3 539.60 n mile,航行时间不超过341.68 h,主机转速在35~73 r/min。此外航程和航行时间约束会随着船舶位置的变化进行调整。 4)优化结果分析。 将目标优化函数和约束条件代入到遗传优化算法中进行优化。优化完成后的燃油消耗总量为802.93 t,相比优化前的831.05 t节省燃油28.12 t。根据式(23)计算得到优化后CO2排放总量为2 502.47 t,相比优化前的2 590.11 t减少碳排放87.64 t。总体上节省了3.38%的燃油和排放量。 QCO2=11QTotalλ/3 (23) 式中:QCO2、λ分别代表CO2排放总量、船用燃油的含碳量。 取各个航段中间位置为采样点,总共7个点,各航段采样点航速优化前后对比,如图6所示。 图6 各航段航速优化前后对比 各航段航速优化前后单位距离油耗和CO2排放量对比,分别如图7、8所示。 图7 单位距离油耗对比 图8 单位距离CO2排放量对比 由图6~8可知,通过优化,各航段的主机单位距离油耗量和排放量均有所降低。特别在航段4,考虑全局海况采用降速航行策略,节省燃油最明显。 1)本文以30万吨散货船实船营运数据为案例,证明了所提出的航速动态优化模型在节能减排中的优越性。本研究成果同时也可应用于其他类型船舶,实现不同海况下的航速优化,为船舶能效水平的提升提供参考。 2)利用K-means聚类算法和K-近邻分类算法可实现对海况的聚类和分类识别,识别准确率较高。 本文只针对定航线船舶研究了海况识别,没有考虑不定航线的船舶。航行区域和时间的变化会对海况识别的准确率造成干扰,这需要在以后的工作中进一步研究。3.2 案例分析






4 结论
