颗粒物数量与粒径分布的光学测量系统设计
2022-04-22张子同汤思达姜岩峰
杨 安,张子同,汤思达,姜岩峰
(江南大学物联网工程学院,江苏 无锡 214122)
1 引 言
颗粒污染是指空气中非常小的粒子混合物,这种粒子混合物能在空气中悬浮较长时间,并携带有各种有毒、有害物质,如重金属、微生物等。当这些颗粒物被人体吸入,会对人体心脏和肺造成伤害。颗粒污染主要来源于人类活动,比如交通运输,农业,工业生产等[1-3]。研究表明这种细颗粒物会对人类的呼吸道和心血管健康产生很大伤害。
目前的颗粒物浓度检测方法有:(1)滤膜称重法[4]:采集一定体积并带有颗粒物的气流通过滤膜,颗粒物会过滤到滤膜上,计算滤膜前后重量差值和气流体积的比值,即可得到颗粒物的质量浓度。(2)微量震荡天平法[5]:空气中的颗粒物沉积在监测仪器内部的振荡空心锥形管,导致锥形管振荡频率发生改变,根据频率的变化量得到颗粒物的浓度。(3)β射线衰减法[6]:β射线照射被截留在滤膜上的颗粒物,根据采样前后滤膜上β射线能量衰减量得到颗粒物的浓度。(4)光散射法[7-8]:激光通过含有颗粒物的气体时产生散射,散射光的变化和颗粒物的浓度成一定关系,通过测量散射光的强度得到颗粒物的浓度。其中基于光散射法原理的传感器由于具有能实时监测、体积小、重量轻、操作简便等优点而得到广泛应用。光学粒子计数法和小角前向散射法是光散射测量颗粒物的两种常见方法。粒子计数法通过单个粒子的散射光来测量粒子的粒径和数量[9],根据Mie散射理论,散射光强度与颗粒的相对折射率有关。在实际应用中,由于无法确定所测颗粒物材质,因此难以根据散射光强度与粒径的关系确定颗粒的大小,导致粒径测量的偏差。小角前向散射法是测量颗粒在前向某一角度范围内的散射光能分布,从中求得颗粒的粒径大小和分布。单良[10]等结合小角前向散射法与偏振比法,并引入人工鱼群算法,使得目标函数的反演精度优于传统目标函数的反演结果。王文誉[11]等基于粒子计数法,采用高带宽电路与粒子重叠校正算法实现小流量高浓度颗粒物测量,浓度上限达到3×105cm-3。
本文利用单片机微控制器(MCU)高集成度、可扩展、易于升级的优点,基于光散射法设计了可同时检测颗粒粒径与数量的光学传感器,将两组测量数据进行融合得到各粒径分布的颗粒浓度值。
2 系统设计
如图1所示为系统原理,主要包括颗粒物检测部分和信号接收与处理两部分组成。光电二极管作为粒子计数模块的颗粒光散射信号接收部分,当一个颗粒经过测量区时,即被入射激光所照射并产生散射光,经光电系统转换成一个电脉冲,计数脉冲数量得到的值就是颗粒数量。颗粒流轴线位于曲面反射镜曲率点和焦点之间,根据反射定律,二极管放置于球面镜曲率点外合适位置,可以保证颗粒物散射光都被球面镜反射至光电二极管光敏区上。球面镜对散射光的接收半角为60°,焦距为3 mm,在反射镜上通过镀银覆膜工艺来增强球镜反射能力。颗粒前向位置为一傅里叶透镜,放置于样品颗粒之后,从而能够降低测量颗粒粒径的下限,受光照射下颗粒的散射光被位于傅里叶透镜焦平面上的多元光电探测器接收。按照无因次准则,设定最小可测量颗粒粒径为1 μm,得到多元光电探测器半径最小为7 mm。多元光电探测器各环尺寸按对数规律分布,设定环数50,则最小尺寸在环数1上为35 μm。为保证能精确采集衍射光能量,设该环至少有5个像元采集,选用东芝TCD1500C线阵CCD,该型号像元尺寸为7 μm,满足设计要求。光电二极管电路饱和输出电压3.3 V,电路信噪比为51.8 dB,能够测量的最小光电二极管有效电流为83.2 nA,即系统电路灵敏度为83.2 nA。系统电路的脉冲响应时间从10 %至90 %为11.6 μs,过冲3 %。信号接收部分将颗粒数量与颗粒粒径信息进行分析与融合。图2为所设计的微型颗粒物传感器实物图。
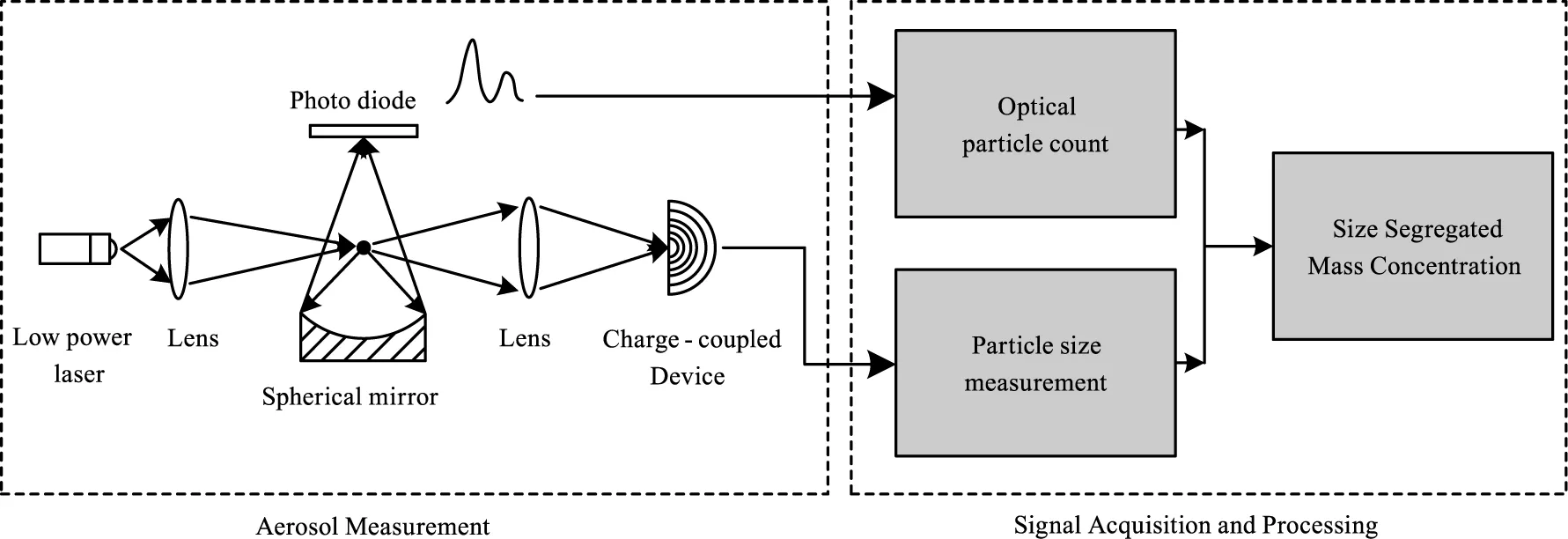
图1 传感器系统结构
图2 颗粒物传感器实物图
2.1 信号处理电路
光电二极管的电流脉冲信号需要转换为可采集的电压脉冲信号,当颗粒物粒径低至1 μm以下时,光电二极管产生的光电流信号将变得微弱,若信号处理电路设计不当,这种微弱信号极易被电路噪声淹没。因此需要设计一种高增益低噪声放大电路来精确采集二极管的光电流信号。如图3所示为光电信号处理电路,该处理电路第一级跨阻放大器将光电二极管D1的电流信号转变为电压脉冲信号,然后通过第二级的滤波增益放大电路得到峰值为3.3 V的电压信号。这里光电二极管选用Vishay公司的VBPW34S,光照辐射敏感区为7.5 mm2,等效电阻为5 GΩ,零偏置时内部结电容为70 pF,在环境温度为25 ℃,10 V反向偏置电压情况下,光电二极管暗电流为1.5 nA,并且随着温度上升,暗电流会继续增大,不仅影响光电流的信噪比,而且该暗电流经过跨阻放大器放大,会对电路的整体噪声产生不良影响,因此通过R2和R3电阻将光电二极管偏置在0 V左右,此时暗电流对电路影响可忽略不计。当去除掉光电二极管暗电流的影响后,对电路噪声产生影响的有放大器输入电压噪声、放大器输入电流噪声和电阻产生的约翰逊噪声,放大器选用德州仪器的TLV9002双通道运算放大器,反馈电阻R1为10 MΩ,约翰逊噪声主要来源于电阻R1。根据TLV9002数据手册所给数据,在带宽内对噪声谱进行积分,并折算到运算放大器输出端,得到跨阻放大器输出噪声的均方根值,其中电压噪声2.8 mV,电流噪声14.1 μV,电阻R1约翰逊噪声1.03 mV。总输出噪声为上述分量的均方和为2.99 mV。同理第二级滤波增益放大电路总输出噪声为177 μV,相对于第一级可忽略不计。
(1)
(2)
式中,SNR为信噪比;Vpeak RMS为输出噪声电压有效值;Vnoise为输出噪声有效值;Vpeak为输出电压峰值。根据上述数据得到光电信号处理电路信噪比为51.8 dB,因此电路噪声不会对光电二极管信号采集造成太大影响。由于光电二极管和放大器内部具有等效寄生电容,由此产生的极点会对电路稳定性产生影响。
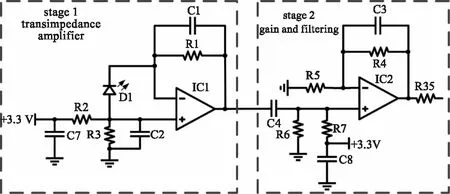
图3 信号处理电路
(3)
Ctotal=CD+CCM+CDIFF
(4)
式中,fp为极点频率;Ctotal为总寄生电容;CD光电二极管VBPW34S的等效结电容;CCM为运算放大器TLV9002的输入共模电容;CDIFF为输入差模电容。由式(4)可得总寄生电容Ctotal由二极管电容CD(70 pF),运算放大器输入共模电容CCM(5 pF),运算放大器输入差模电容CDIFF(1.5 pF)共同组成,将值代入(3)式得极点频率fp为208 Hz,使用Micro-Cap软件对跨阻放大器电路进行AC仿真,得知在13.8 kHz处电路的环路幅频增益为0 dB,对应相频相移为179.16°,相位裕度0.84°,电路可能会产生自激震荡。为保证跨阻放大器电路稳定,接入反馈电容C1,引入零点,设其变化后的频率为闭环增益为0 dB时频率的0.1倍,即:
(5)
式(5)经过变换,反馈电容值为:
(6)
将R1和fp参数代入式(6)计算得到C1值为11.53 pF,将该反馈电容配置于R1处并联,再次进行仿真,得到在145.3 kHz处幅频增益为0 dB,对应相频相移为94°,相位裕度84°,电路达到稳定。
为使电压脉冲信号能被MCU系统处理,需要对IC1的模拟输出信号进行比例放大,并且需要滤波电路对信号进行滤波以限制噪声带宽,并降低模拟信号链路上输出端的峰峰值。图3中以IC2运算放大器组成滤波增益级,经过测量得到光电二极管最大光电流约为10 nA,通过跨阻放大器得到峰值约100 mV脉冲电压,因此设定滤波增益环路增益为33,使得IC2输出电压峰约为3.3 V。该滤波增益级通过R6和R7电阻将正相输入端口直流偏置在较低电压,使得当光电二极管光电流为零时,IC2的输出电压接近于地平面电压,以实现电路较高的信噪比,使得整个系统对粒径较小的颗粒物有更高的检测精度。如图4所示为测得的单颗粒脉冲形状,脉冲宽度和光电二极管感应区大小和颗粒流过光室速度有关。
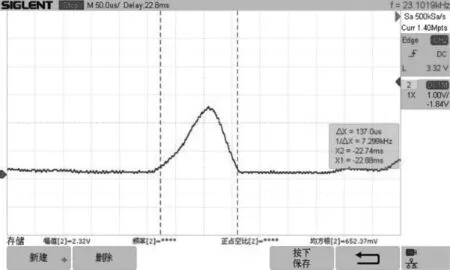
图4 单颗粒脉冲形状
通过气流量控制,脉冲半峰宽度在50~75 μs之间,脉冲带宽在13.3~20 kHz之间。通过C4,R6,C3,R4组成带通滤波器,根据脉冲带宽设计通带带宽为7 kHz,图2中C4和R6确定滤波器下限截止频率,C3和R4确定滤波器上限截止频率。
2.2 小角前向散射
一般测量的颗粒属于多分散颗粒系统,当平行光照射到测量区中的颗粒群时便会发生光衍射现象,衍射光强度分布与测量区中被照射的颗粒直径和数量有关,用接收透镜使颗粒散射出来的光聚焦到焦平面上,在平面上放置多元光电探测器,用来接收衍射光能分布。图5为单个球形颗粒在光电探测器上的散射光能分布模型,光电探测器的颗粒粒径范围以及分档由无因次准则数来估算:
(7)
式中,λ为入射光的波长;f为接收透镜的焦距;Di为光电探测器第i环的颗粒平均直径;Si为第i环的半径。
按照Mie理论,多颗粒系统在多元光电探测器第n环上的散射光能为:
(8)
式中,Wi(i=1,2,…,n)为颗粒重量频率分布;Di(i=1,2,…,n)为颗粒直径;θn,1和θn,2为第n环内环外环对应的衍射角;i1和i2分别为垂直及平行于散射平面的散射强度函数分量,式(8)可以写成矩阵形式,即:
E=TW
(9)
(10)
式中,T是光能分布系数矩阵,通过设定各区间粒径Di获得;E为测量得到的被测颗粒的衍射光能分布;通过逆运算方法获得颗粒尺寸分布W。
2.3 天牛须算法
天牛须搜索[12],也叫甲壳虫须搜索,是2017年提出的一种高效的智能优化算法。天牛须搜索不需要知道函数的具体形式,不需要梯度信息,就可实现高效寻优,由于只需要一个个体,即一只天牛,运算量大大降低。天牛根据食物气味的强弱来觅食,天牛有两只触角,如果右边触角收到的气味比左边触角收到的气味强度大,那下一步天牛就往右边走,否则就往左边走。食物的气味就相当于一个函数,这个函数在任意空间每个点值都不同,天牛两个须采集自身附近两点的气味值,天牛的目的是找到全局气味值最大的点。仿照天牛的行为,我们就可以高效地进行函数寻优。
天牛须算法的具体优化步骤如下:
步骤1:根据目标函数,建立一个k维空间,迭代次数n设定为500,天牛两须距离d设定为12,初始步长step设定为12,迭代系数设定为0.98,
步骤2:因为天牛的朝向是任意的,因而从天牛右须指向左须的向量的朝向也是任意的,其方向可表示为:
(11)
其中,rand(k,1)产生随机向量,norm对其进行归一化。
步骤3:设定左右两须的搜索行为,模仿天牛触角的活动:
(12)
其中,xr和xl分别代表右侧和左侧搜索区域的位置。
步骤4:通过将搜索行为与求取目标函数极值相关联,进一步生成如下迭代模型:
x=x-step·dir·sign(f(xl)-f(xr))
(13)
其中,f(xl)和f(xr)为求取的左右两须的值;sign为符号函数,通过两者的大小,来确天牛的走向。
2.4 仿真分析
仿真实验中,使用波长为650 nm,功率为5 mW的半导体激光器,多元光电探测器与透镜焦距为25 mm,设定颗粒折射率为(1.596-0.1i)/1.33,可测颗粒粒度范围为3.85~101.85 μm,探测器环数为50环,适应度函数设定为:
(14)
式中,Ecn为理论计算的衍射光能分布向量;Esn为反演得到的衍射光能分布向量,经过天牛须算法迭代,fit值越小,就可找到最佳特征粒径参数和粒径分布宽度参数的值,这时求得的尺寸分布W就是所求的颗粒尺寸分布。
设定颗粒分布为正太分布曲线,颗粒粒度特征参数(σ,M)=(10,30 μm)并迭代500次目标适应度函数,得到图6变化规律图,横坐标为迭代次数,纵坐标为适应度值并经过对数处理。从图6中可以看到适应度值在初期下降很快,并在250次左右迭代后趋于稳定。
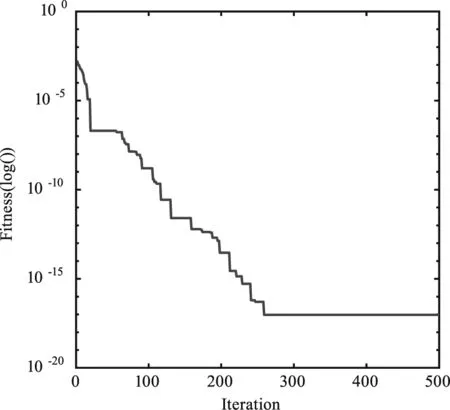
图6 正太分布适应度值变化图
表1列举了正太分布、Rosin-Rammler分布、Johnson′s SB三种常用颗粒重量频率分布函数对设定颗粒特征参数的寻优结果。对目标函数添加1 %、3 %、5 %的随机噪声,每种噪声情况下执行天牛须算法50次,计算颗粒物的平均分布参数、特征参数的标准差和RMS值。
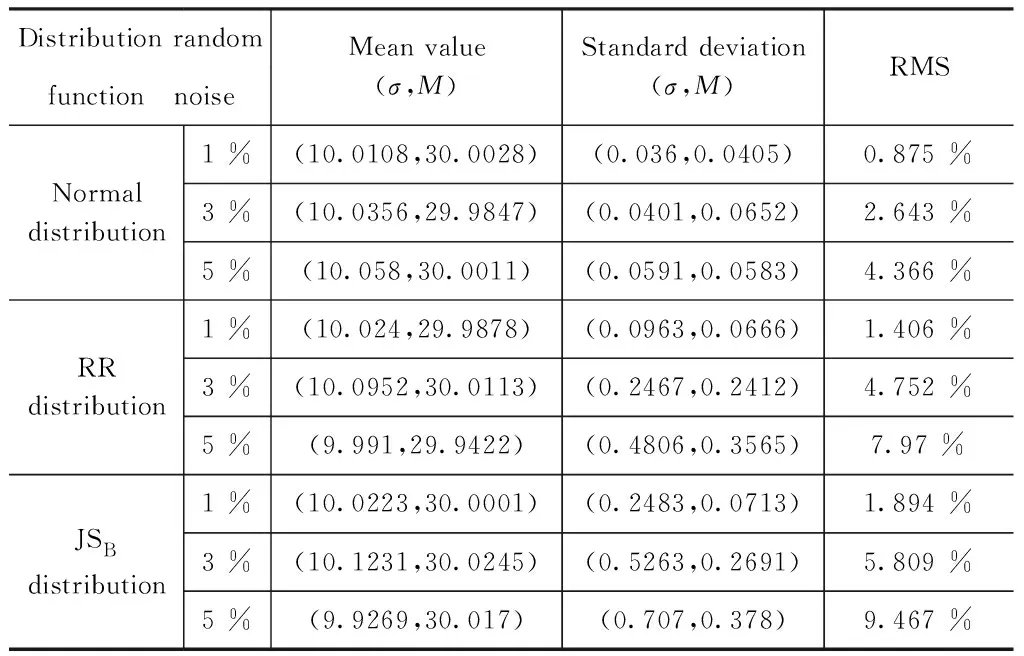
表1 不同噪声对不同分布函数反演结果
由表1可以看出,在三种不同噪声下,利用天牛须算法对不同颗粒分布函数反演能较好地得到优化结果。随着噪声的增加,三种分布函数误差也略微增加,总误差控制在10 %以内,说明天牛须算法对不同单峰分布函数反演有较好地鲁棒性和抗噪能力。
3 实验与分析
选取国家标准颗粒GBW(E)120005(16 μm)作为被测样本,用线阵CCD代替多元光电探测器,实验中参数以及算法参数设置与仿真一致,建立如图7所示实验环境。气溶胶发生器将颗粒样本雾化送入稀释器中,稀释器将纯净干燥空气与样本混合,流量控制器控制被测颗粒物浓度。颗粒流经分流器流向本文设计的颗粒物传感器和TSI公司的TSI-3321空气动力学粒径谱仪。
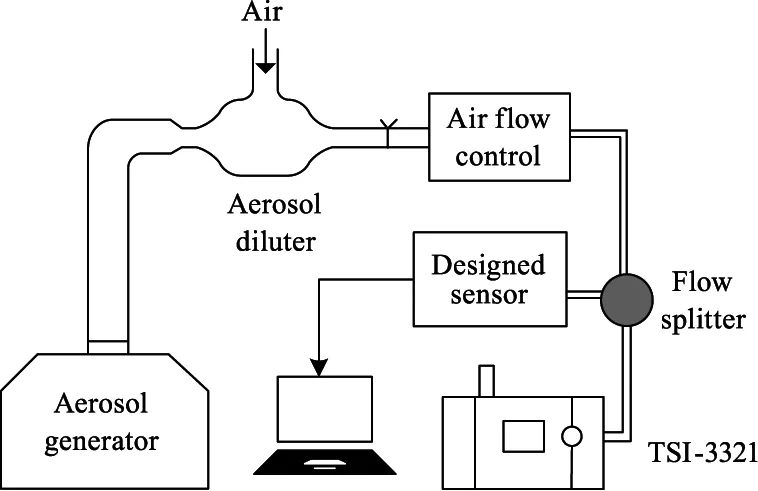
图7 实验平台
将本文设计的传感器测量浓度数据与标准浓度进行对比,得到图8测量结果,可以看到线性拟合后测量值与标准值相关性接近1,在3×103cm-3浓度范围内误差小于10 %。在测量时间内对线阵CCD每个传感单元信号进行积分,将散射能量信号减去无颗粒流时散射背景能量,利用天牛须算法对假设颗粒粒径分布为RR分布和J SB分布进行反演,算法参数设置与仿真中一致,得到表2结果,可见天牛须算法反演得到的特征粒径参数M误差较小。
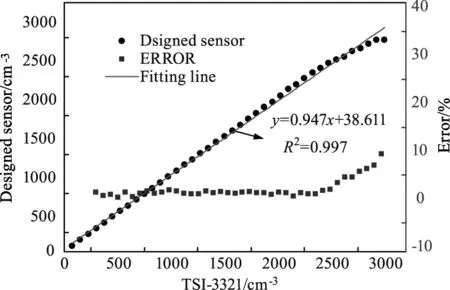
图8 浓度测量结果
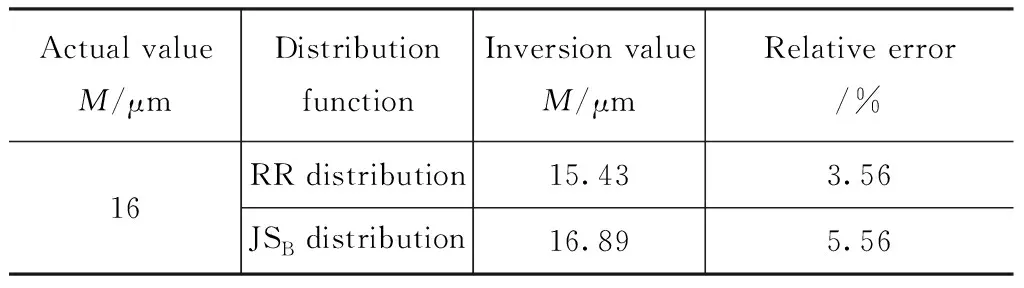
表2 颗粒粒径实验反演结果
4 结 论
本文基于光散射原理,讨论研究可同时测量颗粒数量与粒径参数的传感器系统方案。设计了具有较高计数效率的信号处理电路,实验结果显示其测量的浓度在3×103cm-3范围内相关性在0.99以上,与标准浓度相对误差在10 %以内。提出利用天牛须算法对颗粒粒径反演进行仿真与实验,仿真显示该算法有较好地鲁棒性和抗噪能力。通过搭建实验平台,对16 μm标准颗粒物粒径反演误差较小,从而实现颗粒质量浓度的精确测量。
