基于光子多普勒测速的长景深动态测试研究
2022-04-23武锦辉冯进宝严赛美
司 宇,刘 吉,武锦辉,冯进宝,刘 昊,严赛美
(中北大学信息与通信工程学院,山西 太原 030051)
1 引 言
光子多普勒测速技术(Photonic Doppler Velocimetry,PDV)是采用外差法进行速度测量的技术[1],具有结构简单、测速范围大、数据处理相对简单、测试精度高、健壮性好的特点,适用于匀速运动以及速度变化剧烈的被测物[1-4],适用于多种场景。
国外对于PDV的研究以美国Lawrence Livermore、Los Alamos、Sandia实验室等为代表,主要致力于解决超高速测量领域,例如破片、内爆、聚变等场景下PDV信号频率过高和硬件采样率不足、探测器带宽不够、时间分辨率低之间的矛盾,例如早期提出利用调谐激光器进行光学降频、微波混频进行电信号降频,近年Mance.J.G等提出以啁啾脉冲激光代替连续激光提高时间分辨率的方式[5-8]。而在大范围测试应用中,以德国Polytec公司等为代表的激光测振仪具有代表性,其工业级产品IVS-500最大工作距离3 m,可通过调节档位实现最高2000 mm/s的振速测测量。
国内对于PDV的研究自上世纪末就已见报道,中国工程物理研究院在PDV的研究方面取得了瞩目的成绩,针对单点、多点测量,破片、爆轰测量的实验应用中成果显著,达到了国际领先水平[2,9],近年马鹤立等在PDV光路结构基础上利用频域干涉实现了小口径长身管内径测量,200 mm的范围内与千分尺测量极差为0.014 mm[10]。在动态测量方面,彭映成等用PDV结构设计了景深±2 cm的振动位移传感器用于测量防护体受冲击波的形变位移[11],王韵致等公布了一种复合光纤的马赫-增德尔外差干涉位移在线测量系统,100 μm位移测量标准差为6 nm。
上述应用均基于短距离、高速运动测量或者低速精密位移测量。本文在长距离动态测试应用背景下,如测量枪械自动机运动状态、工业自动化控制监测等,设计PDV系统和实验环境并进行测试分析。
2 PDV与大景深动态测试原理
PDV基于迈克尔逊干涉仪模型,本质上对于信号光的耦合功率有一定要求,而对成像不做要求。
根据光电探测器的光强响应原理,光电探测器产生的干涉电信号可表示为:
(1)

(2)

在PDV的实际使用中,由于单模光纤的数值孔径较小、光纤微透镜耦合输出的激光光束具有一定发散角。动态测试中,该共轴光学系统的有效耦合空间十分有限,只局限于近轴区。利用发散角小于1°的微棱镜红外反射膜贴在被测物表面以提高耦合效率。光纤微透镜直径3 mm,60 mW出射激光在距离透镜面1.5 m处由红外光敏检测卡测量光斑大小为8.5 mm,同时具有光功率48 mW。实测150 cm距离时环形器3端口静态信号光功率为20~30 μW,在30 cm处的静态信光功率可达260 μW,经过EDFA放大滤波后可满足探测器响应条件。激光系统和探测器本身噪声为8 mV,用微扰动的方式测量150 cm处干涉信号信噪比,得16 dB≤SNR≤23 dB,满足信号解调要求。
光学模块方面,本系统采用的激光器线宽为15 kHz,波长为1550.12 nm。激光经过隔离器后由EDFA放大后进入保偏环形器,耦合进入工作距离300 mm带单模尾纤的非球面镜后出射到待测点位,使用空间光功率计测量探头出射激光功率为60 mW。被测滑块表面贴红外原向反射膜,反射信号光耦合进入非球镜,通过带0.4 nm带通ASE滤波的预放EDFA进行放大,再经由衰减器接入10GHz响应率的PD探测器(科扬光电,型号KY-PRM-10G-1-FA)转化为电信号,并用采集卡和示波器同步采集,通过上位机处理;被测物设置方面,选择无杆气缸的滑块作为被测速度源。
3 激光干涉测速实验系统
为验证PDV在大范围动态测量的应用可行性,搭建PDV干涉测速系统,系统包括光学模块和软件模块两部分,并设置符合条件的速度源进行实验测试,实验系统结构如图1所示。
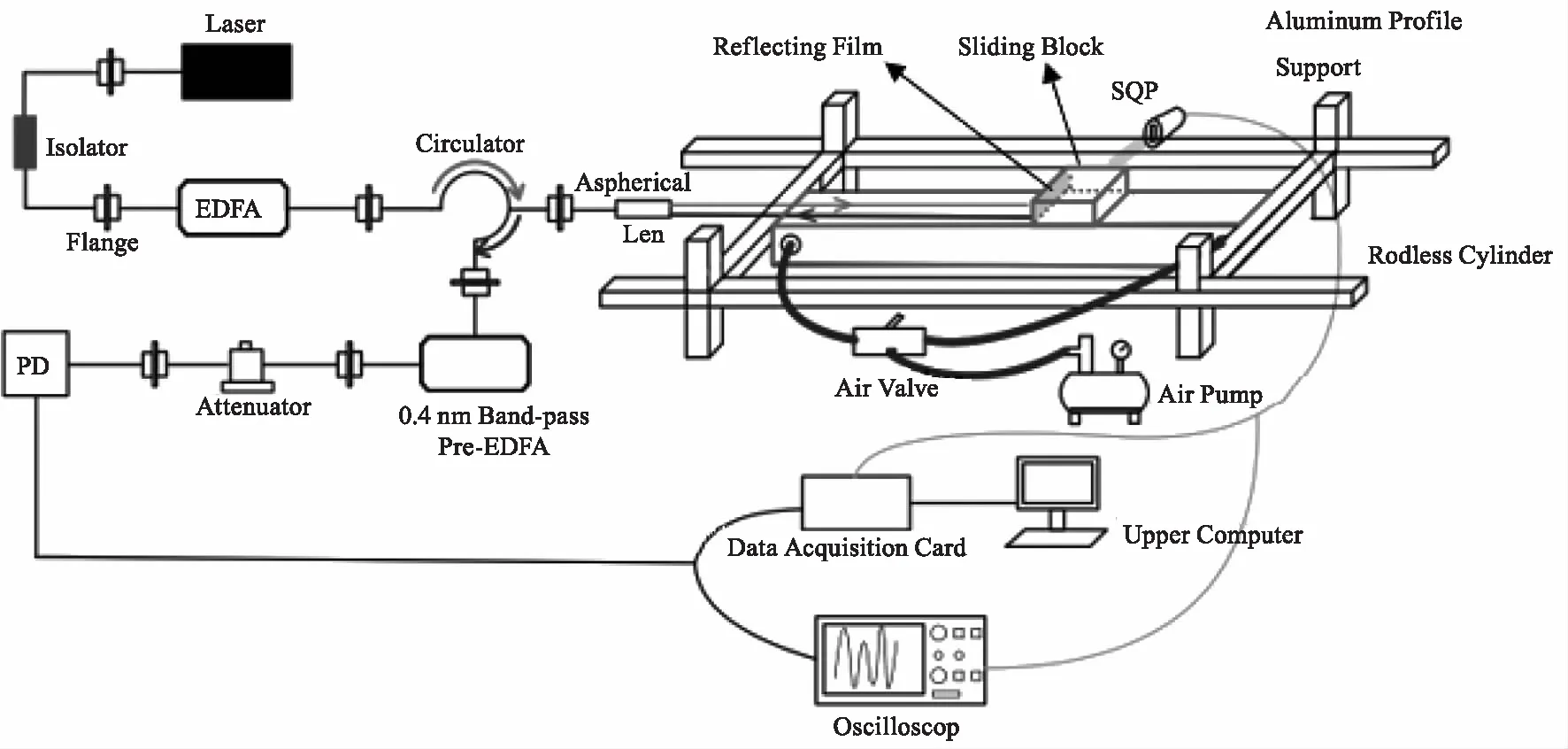
图1 实验系统组成结构图
整体实验流程如下:
实验所使用的空压机工作产生气体压力0.7 MPa,在该气压下通过手动控制空压机阀门开关来推动滑块从起点位置开始运动,以滑块撞击气缸导轨另一端为止停止运动。
实验之前使用光电探测器、一字线激光器、1 mm宽条纹遮挡的原向反射膜对气缸滑块的运动速度范围进行粗略测量(如图2),测量结果表明气缸空载、0.7 MPa压力下滑块的最高速度可达10~14 m/s,信号光多普勒频移在12.9 MHz~18.06 MHz。
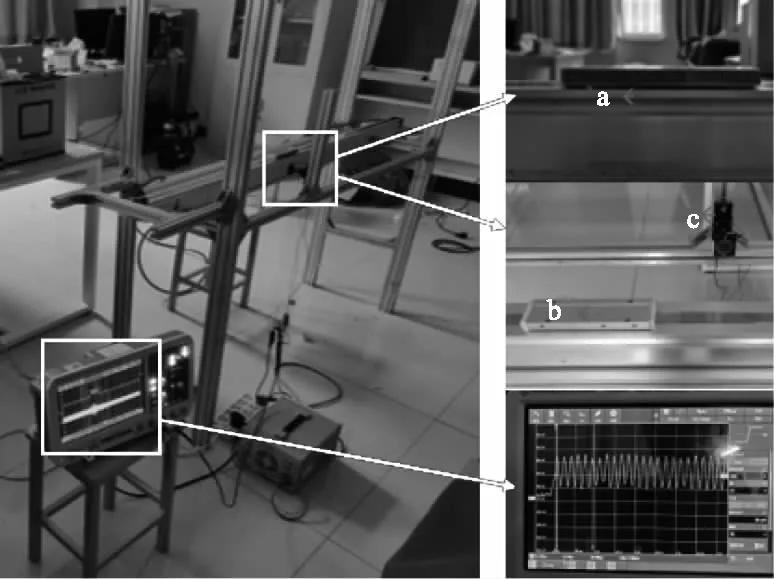
(a-条纹遮挡的反射膜;b-滑块;c-光电探测器和一字激光器)
采用固定支架减少滑块冲击无杆气缸造成的气缸位移和振动影响,用接近开关(SQP)、LED和光电二极管构成滑块运动的外触发信号,如图3所示。

图3 无杆气缸实验设置
实验开始前,标记导轨上一点作为滑块运动的固定起始位置,测量起始位置至末端距离133.7076 cm。以可见光接入探头校准光路,调整探头出射光路和滑块运动轨道平行。设置示波器、采集卡以62.5 MHz采样率进行采样。
4 速度测试实验和数据处理
采集卡采集的多普勒频移信号经过LabWindows编写的上位机软件显示结果如图4所示。
图4中所示干涉条纹图像横轴为采样点数,共计25000000,采样时间长度为400 ms,采样率fs=62.5 MHz,纵轴为4096级归一化量化电压。包含无杆气缸滑块运动的全程速度干涉信号,按时间截取其中有效部分,以N=131072点加窗、M=10000更新点进行FFT时频变换,所得时间-速度曲线如图5所示。

图4 采集卡采集干涉信号

图5 时间-速度曲线
其中横坐标为加窗变换得到的速度点数K,与时间换算关系为tK=MfsK。纵坐标为速度,单位m/s。
由于空压机气体通过二位三通手动气动开关和无杆气缸相连,在空压机高压气体涌入无杆气缸一端时,滑块运动状态表现为自A点开始速度急速上升,滑块高速运动挤压气缸另一端的空气,使滑块运动速度在到达极大值后下降,又在高压气体推动和另一端压缩空气排出气缸双重作用下出现速度缓慢上升态势,以撞击气缸另一端为标志出现运动速度为零的B点。由于该PDV结构光路不具有判断被测物运动方向功能,因此滑块撞击气缸后的支架振动直接表现为滑块速度在大于0的范围内起伏,运动直至振动消失,速度归零。
该曲线时间分辨率T=Nfs=0.16 ms。根据FFT频率分辨率定义和式(2)可得速度分辨率为:
(3)
根据上式可求出相应的速度分辨率为0.370 mm/s。
对A点至B点速度积分得到位移曲线如图6所示,最大位移为133.1522 cm。

图6 无杆气缸滑块位移曲线


表1 位移测量结果
从实验结果来看PDV在1.33 m大景深条件下测量高速运动中的位移测量数据与直接测量结果符合性好,平均相对误差为-0.5266 %,实验证明了该方案的可行性。
5 结 论
本文以300 mm工作距离非球面镜为探头,在60 mW小功率激光的条件下搭建PDV系统,以无杆气缸滑块为速度源验证了PDV结构在1.3 m景深动态测量中应用的可行性。实验恢复出了滑块完整速度曲线,且对于加速度突变的反弹点运动状态捕捉良好。实际在1.5 m处仍可以取得有效干涉信号。结果表明PDV结构的健壮性良好,光学设计可靠,速度分辨率高,展现出PDV在工业控制、长景深动态测速领域,例如监测枪械自动机运动状态以判断枪械击发是否到位、击发惯性对于枪体影响,枪械击发频率测试等方面的应用前景。
