基于制氢协同阻尼控制技术的次同步振荡抑制研究
2022-04-21马天辉马巍巍谷怀广刘栋
马天辉,马巍巍,谷怀广 ,刘栋
(1.上海电力大学电气工程学院,上海 200090;2.全球能源互联网研究院有限公司,北京 102209)
随着海上风电在电力系统中的渗透率逐步上升,采用MMC-HVDC输电方式成为海上风电场并网的理想方案[1]。由于大量电力电子器件接入电网,风电机组与MMC-HVDC等有源快速控制装置相互作用,在特定频率下,极易诱发次同步振荡。
针对海上风电场经柔直并网引发的次同步振荡问题,已有部分研究提出一些抑制措施。文献[2]分析了次同步振荡在海风柔直系统中的传播机理,并在MMC-HVDC海上换流站的控制系统中添加了电流反馈信号,用于抑制次同步振荡电流,但是没有对风电场环节进行次同步振荡抑制,可能导致附加阻尼不足以抵消系统的负阻尼。文献[3]根据次同步振荡现象的产生机理,在双馈风机的网侧变换器和机侧变换器的控制策略中分别引入了附加阻尼控制器,并且得出了机侧附加阻尼控制器抑制次同步振荡的性能优于网侧附加阻尼控制器的结论。文献[4]揭示了海上双馈风电场与柔性直流输电控制系统相互作用引发次同步振荡的阻尼特性,并提出了一种基于风电场侧和柔直换流站侧的协同阻尼控制措施。文献[5]提出了一种利用制氢系统抑制新能源并网系统次同步振荡的方法,并得到了储能系统本身可在一定程度上抑制次同步振荡的结论。
近年来,风电制氢作为一种更清洁更环保的氢能生产制取途径,受到了世界各国的关注[6-7]。风电制氢减轻了传统化石燃料制氢对环境造成的污染与破坏,此外风电制氢系统亦可在提升系统稳定性方面发挥十分重要的作用[5]。本文以海上双馈风电场经MMC-HVDC输电系统并网引发的次同步振荡问题为研究对象,提出了双馈风电机组转子侧附加励磁阻尼控制器(doubly fed induction generator-supplementary excitation damping controller,DFIG-SEDC)和碱性电解槽直流次同步阻尼控制器(alkalineel ectrolysis-supplementary subsynchronous damping controller,AE-SSDC)协同控制方法,通过PSCAD/EMTDC仿真平台,对上述方法的抑制效果和传统抑制方法进行了对比验证。
1 系统建模
1.1 海上风电场模型
大型海上风电场采用的风机数量多,风机模型阶数高,单台机组容量大。对风电场进行详细建模,仿真时间将成指数增长,不利于仿真计算[8-9]。另一方面,针对海风柔直系统的研究,着眼于整个风电场对系统的影响,并不需要考虑每台风机的单独特性。基于此,本文采用1台风机详细建模,n-1台风机用电流源等效的方式建立风电场模型。
本文选取DFIG为风场机组。DFIG是目前应用最为广泛的风力发电机,其转速控制系统采用定子电压定向控制,具体方程如下[10]:
1)DFIG的电压方程为
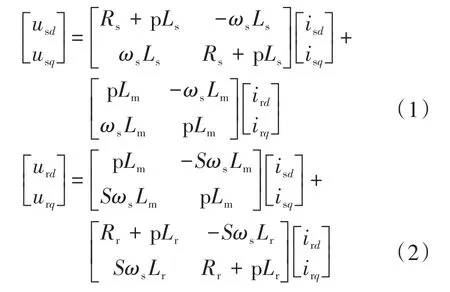
2)DFIG的运动方程为

3)DFIG的定子侧功率方程为
式中:usd,usq分别为定子侧电压的d,q轴分量;urd,urq分别为转子侧电压的d,q轴分量;Rs,Rr分别为定子绕组、转子绕组的电阻;isd,isq分别为定子侧电流的d,q轴分量;ird,irq分别为转子侧电流的d,q轴分量;Lm为在同步旋转坐标系下的定子绕组和转子绕组的等效电感;Ls为定子绕组电感;Lr为转子绕组电感;p为微分算子;ωs为同步角频率;S为转差率;ω为转子旋转角速度;Te为电磁转矩;TL为原动机拖动转矩;Ps为定子侧有功功率;Qs为定子侧无功功率;np为电机极对数;J为风电机组转动惯量。
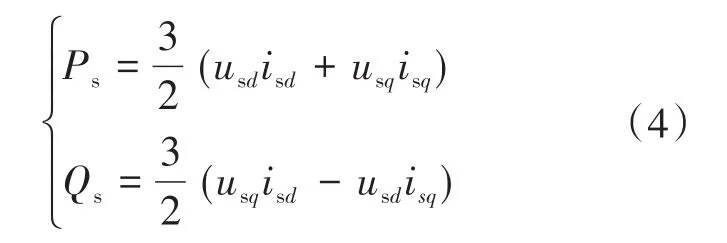
由式(1)~式(4)可知,DFIG的转速调节系统通过定子电压定向控制可以实现转子电流的解耦控制。在不同的风速下,通过对发电机转速的调节,获得最佳叶尖速比,从而追踪最大输出功率,实现MPPT控制。具体控制框图如图1所示。
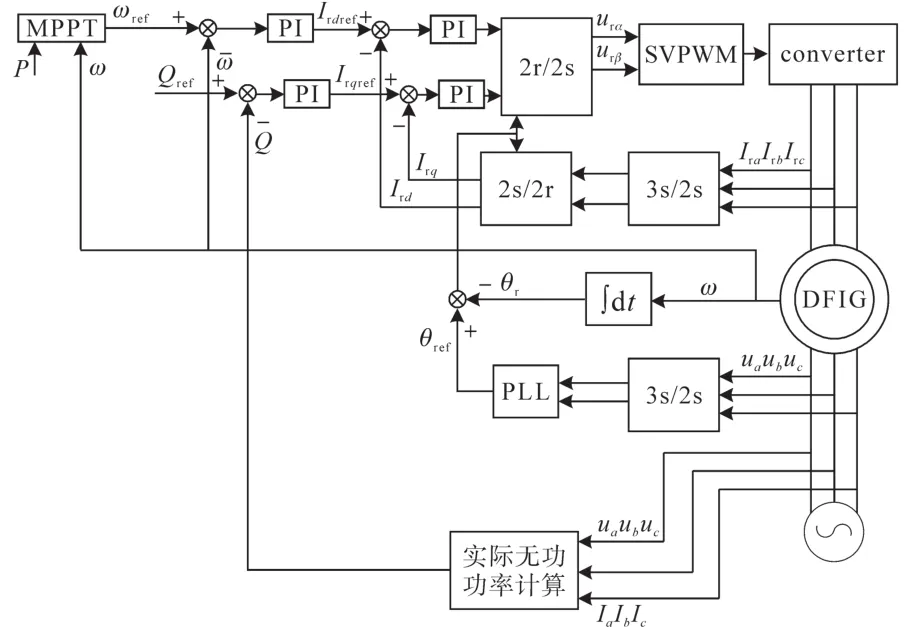
图1 DFIG最大功率跟踪控制框图Fig.1 DFIG maximum power tracking control block diagram
1.2 柔性直流系统模型
双端MMC-HVDC系统结构图如图2所示。图2a为双端MMC-HVDC系统单线图,包括送端换流站(sending-end converter,SEC)和受端换流站(receiving-end converter,REC);图 2b为 MMC模块拓扑结构,采用典型的半桥子模块拓扑连接方式。正常运行情况下,送端换流站为风电场提供交流支撑,控制风电场集电处电压的幅值和频率;受端换流站用于稳定直流母线电压。
图2 双端MMC-HVDC系统结构图Fig.2 Structure diagram of double-end MMC-HVDC system
正常运行情况下,交流侧只含有基频分量,直流侧只含有直流分量,2倍频环流为负序电流,只在MMC的三相桥臂之间流动[11]。
以a相为例,SEC上、下桥臂电压、电流分别如下式:

1.3 制氢系统模型
电解槽根据电解液的不同主要分为碱性电解槽(alkalineel ectrolysis,AE)、质子交换膜电解槽(proton exchange membrane electrolysers,PEM)和固体氧化物电解槽(solid oxide electrolysers,SOEs)[12]。目前,AE由于研究时间最长,技术最为成熟,已经进入商业阶段。本文基于此类电解槽展开研究。
电解槽是制氢系统的核心部分,由N个电解单元级联构成,反映单个电解单元动态电气特性的拓扑结构如图3所示。
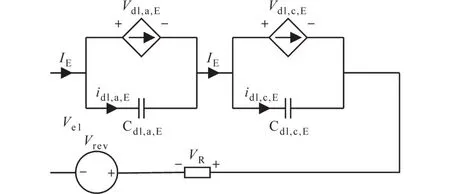
图3 电解单元拓扑Fig.3 Electrolytic cell topology
图3中,Cdl,a,E和 Cdl,c,E分别为电解单元阴、阳两极的等效电容;idl,a,E和idl,c,E分别为电解单元阴、阳两极流入的电解电流;Vdl,a,E和Vdl,c,E分别为电解单元阴、阳两极的活化电压;Vel为电解单元端电压;VR为电解单元工作时欧姆损耗引起的欧姆电压;IE为通入电解单元的直流电流;Vrev为电解单元工作时的正常工作电压。
电解单元的端电压[13]如下式:
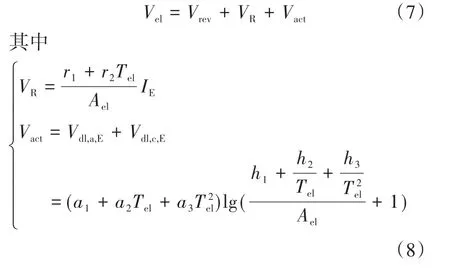
式中:Vact为电解单元活化极化现象而引起的活化电压;rm(m=1,2)为电解单元欧姆参数,表征欧姆过电压和温度之间的相关性;an,h(nn=1,2,3)为极化过电压参数;Ael为电极面积;Tel为电解单元温度。
制氢系统通过DC/DC控制回路接入柔直系统直流侧。由于从柔直系统直流侧采集到的电压相较电解槽工作电压较高,且采用非隔离式DC/DC变换器实现大变比转换电压相对困难,因此本文采用双有源桥式DC/DC变换电路(dual active bridge,DAB),其拓扑结构如图4所示[14],控制框图如图5所示。图中,M为PWM的控制信号。
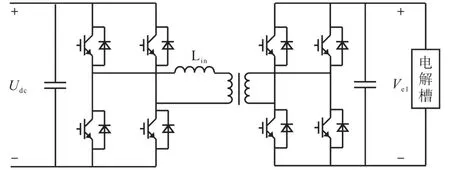
图4 DAB拓扑Fig.4 The topology of DAB

图5 DAB控制策略Fig.5 DAB control strategy
2 系统建模
2.1 源-储协同阻尼控制原理
海上风电场发生次同步振荡后,将输出频率为fss的次同步振荡电流,该振荡分量将流入MMC-HVDC系统,叠加至稳定分量中,由式(5)、式(6)得:
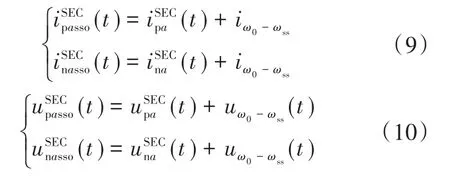
由式(9)、式(10)可知,MMC-HVDC系统直流侧电流中包含频率为f0-fss的次同步交流分量,同时该分量也会对直流电压产生影响,进而影响制氢系统的电压稳定性。
本文对附加控制初步选址,在DFIG励磁装置和制氢系统DC/DC变换器控制回路施加阻尼控制。在风电场侧采用SEDC,在制氢系统采用SSDC。通过协同阻尼控制器产生的附加转矩以增加系统次同步振荡模态下正的电气阻尼,用于抵消系统的负阻尼,从而抑制次同步振荡的发生。
2.2 DFIG-SEDC的设计
DFIG-SEDC结构如图6所示,其基本工作原理为:以Δω为控制系统输入信号,经过隔直环节、带通滤波环节提取信号次同步分量;再通过比例-移相环节补偿信号相位并进行比例放大,最终通过限幅环节得到与系统相适应的附加电压控制信号,将其施加在DFIG转子励磁电压的q轴分量上,将参数按下文所述传递公式整定,可达到抑制次同步振荡的目的[5]。
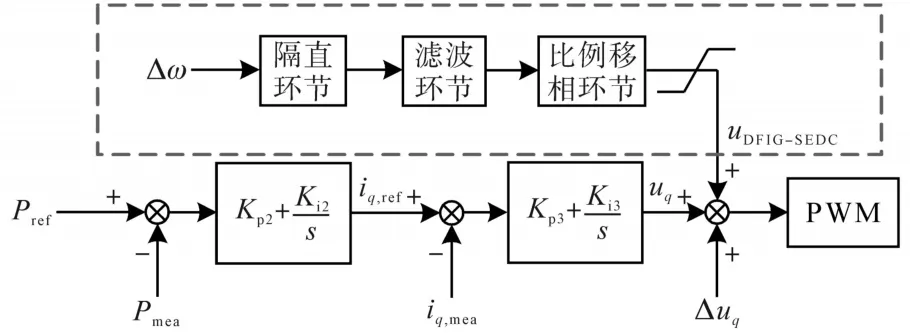
图6 DFIG-SEDC结构Fig.6 DFIG-SEDC structure
隔直环节传递函数为

式中:Tw为隔直环节时间常数,本文取5 s[15]。滤波环节选用二阶带通滤波器:

式中:ξss为带通滤波器阻尼比;ωss为次同步角速度。比例移相环节补偿信号产生的相移,经过比例放大得到和系统对应的控制信号。传递函数如下:
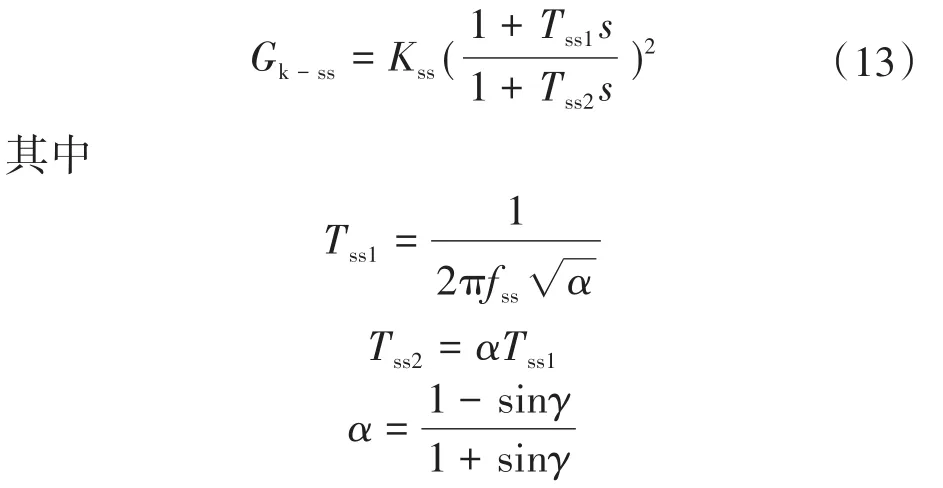
式中:Tss1,Tss2为相位补偿环节时间常数;γ为待补偿频率对应处的滞后相位。
SEDC控制器相位补偿环节中增益Kss直接关系到SEDC能够提供的正阻尼大小,增益越大,SSO抑制效果越好,但同时控制器输出更容易达到限幅环节的限值。据此,在保证系统最恶劣的运行条件下,能够抑制SSO的Kss的最小值为仿真条件,经数字仿真测定,最终将SEDC控制器的限幅环节确定为±0.03(标幺值)。
2.3 AE-SSDC的设计
选取电解槽电流作为控制系统的反馈信号,经过滤波、增益、相位补偿、限幅环节后得到制氢系统电压控制环的附加分量,动态改变制氢系统的直流电压,AE-SSDC控制结构如图7所示。
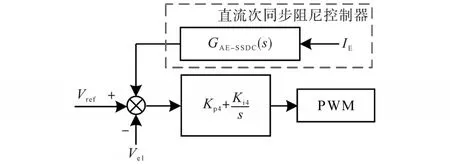
图7 AE-SSDC结构Fig.7 AE-SSDC structure
低频信号处理、滤波环节参数依据次同步振荡频率fss确定。低频信号处理采用一阶高通滤波器:

增益、相位补偿、限幅环节设计方法参照DFIG-SEDC。
3 算例分析
3.1 系统结构
为验证上述提出的次同步振荡电流抑制方法的正确性,基于PSCAD/EMTDC平台搭建了如图8所示的海上风电场经过MMC-HVDC送出并网系统,直流侧通过DAB连接制氢系统。双馈风电场额定容量为130 MW,风电场中的风电机组输出电力经过升压变压器汇集到PCC点;MMCHVDC直流电压等级为±230 kV;交流电网电压为110 kV/50 Hz。
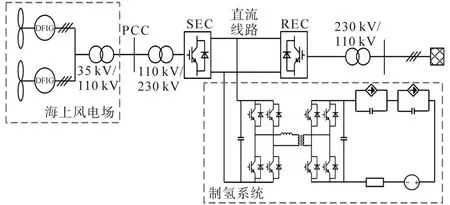
图8 海上风电场经MMC-HVDC并网系统结构Fig.8 Offshore wind farm passes through the structure of MMC-HVDC grid-connected system
3.2 系统振荡分析
基于上述系统,本文建立小信号分析特征矩阵,进行特征值分析,寻找影响系统稳定性的相关变量,如下式:
式中:A为特征值系数矩阵;Δx为状态变量。
状态变量Δx主要由风电机组、柔直系统和制氢系统构成。机组状态变量ΔxDFIG=[Δω,Δusd,Δusq,Δurd,Δurq,Δisd,Δisq,Δird,Δirq,ΔΨsd,ΔΨsq,ΔΨrd,ΔΨrq,Δx1,Δx2,Δx3,Δx4,Δx5,Δx6,Δx7,Δx8]T;MMCHVDC系统状态变量ΔxMMC=[ΔuDC,ΔP,ΔQ,Δid1,Δiq1,Δid2,Δiq2,Δuac,Δx9,Δx10,Δx11,Δx12,Δx13,Δx14,Δx15,Δx16]T;制氢系统状态变量 ΔxAE=[ΔIE,ΔVel,Δicdl,a,Δicdl,c,ΔVact,a,ΔVact,c,Δx17,Δx18]T。上述状态变量中,Ψsd,Ψsq分别为定子的d轴和q轴磁链;Ψrd,Ψrq分别为转子的d轴和q轴磁链;id1,iq1,id2,iq2分别为REC和SEC在旋转坐标系下的电流分量;Δxi为各系统控制部分的状态变量。对上述特征方程求解得到如表1所示特征值。
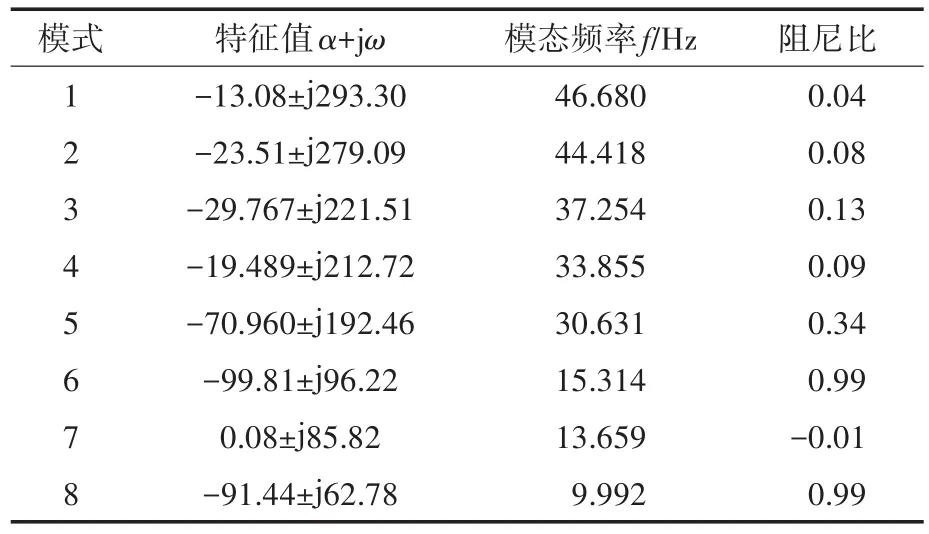
表1 系统振荡模态Tab.1 The oscillation mode of the system
表1列出了次同步频率范围内的模态,可以看出,模式7特征值实部大于0,属于不稳定的次同步振荡模态,主导频率为13.659 Hz,进一步对该模态进行灵敏度分析,得到影响该模态的主要参与因子如图9所示。

图9 参与因子占比图Fig.9 Participation factor proportion diagram
图9仅表示出幅值大于0.1的参与因子,可以看出,对该模态的影响起主要作用的是风电场电流内环控制参数x3以及直流电压控制参数Udc,同时,风机转速、外环功率控制参数、制氢系统端电压也会对该模态产生一定的影响。
为进一步得到系统中次同步振荡电流的分布,对上述系统进行电磁暂态仿真。图10所示为发生次同步振荡现象时,风电场输出的电流波形和FFT分解图。从图中可以看出,风电场输出的电流中除了50 Hz工频分量外,还包含频率为13 Hz的次同步分量(fss),同时存在频率为87 Hz的超同步分量(2f0-fss)。
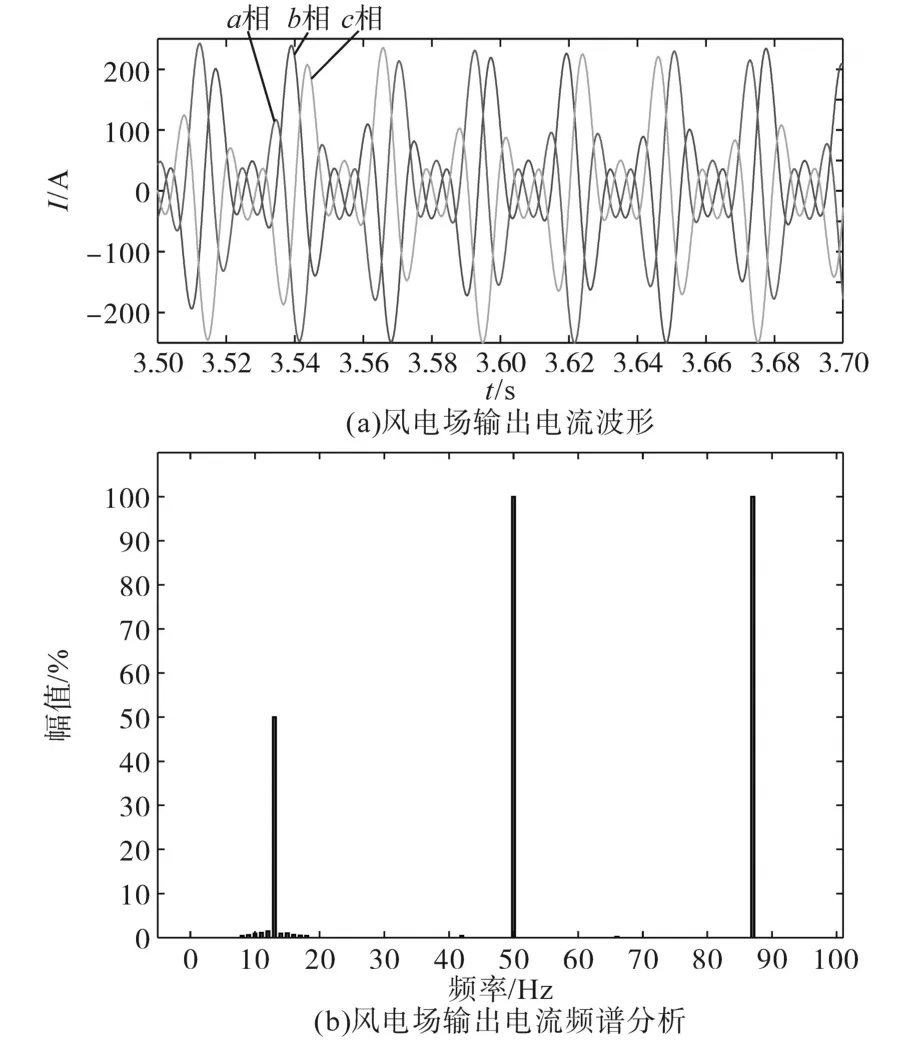
图10 风电场输出电流仿真波形Fig.10 Simulation waveforms of wind farms output current
图11所示为发生次同步振荡现象时,流入电解槽直流电流的波形和频谱分析。从图中可以看出,通入电解槽的直流电流存在频率为37 Hz的振荡分量(f0-fss),与理论结果一致。

图11 电解槽直流电流仿真波形Fig.11 Simulation waveforms of DC current of electrolytic cell
3.3 抑制策略验证
为验证提出的源-储协同控制方法对海风柔直系统次同步振荡现象的抑制效果,本文基于已搭建的系统模型,设置如下工况对其进行验证。
设置海上风电场初始风速为额定风速10 m/s,0.5 s时刻施加扰动,持续0.1 s。在此运行条件下,分别测试无DFIG-SEDC和AE-SSDC接入、单独接入DFIG-SEDC以及同时接入DFIG-SEDC和AE-SSDC三种运行条件下,风电场输出的有功功率变化曲线,如图12所示。

图12 风电场输出功率波形Fig.12 Wind farm output power waveforms
由图12可知,当控制系统不采用任何附加阻尼控制时,风电场输出的有功功率进入振荡状态,且基本维持等幅振荡;单独增加DFIG-SEDC时,对系统次同步振荡有一定的抑制效果,风电场输出的有功功率在振荡后进入衰减状态,但衰减时间较长,仍存在切机风险;同时接入DFIGSEDC和AE-SSDC时,风电场输出的有功功率可以在5 s时刻达到稳定状态,次同步振荡功率迅速衰减,显著提高了系统的稳定性。
4 结论
本文提出了一种制氢协同阻尼控制器,分析并验证了其抑制海上风电场经MMC-HVDC并网系统次同步振荡的有效性,主要工作总结如下:
1)构建了海上风电场、MMC-HVDC系统和制氢系统的电气动态模型及控制策略,基于PSCAD/EMTDC仿真平台实现了海风柔直系统与制氢系统的联合仿真。
2)针对海风柔直系统引发的次同步振荡问题,提出了一种DFIG-SEDC和AE-SSDC的协同阻尼控制器,并给出了其参数设计的思路。
3)基于模型仿真结果,验证了上述协同阻尼控制技术可以更加有效地抑制海风柔直系统的次同步振荡。
