多旋翼无人机惯性单元阻尼减振设计与仿真研究
2022-04-20周苏洁
摘 要:为了提高无人机飞行的稳定性,提出一种基于干摩擦效应的多旋翼无人机惯性单元阻尼减振器,即利用橡胶摩擦片与悬臂支架之间的接触摩擦作用,从而达到耗散振动能量的目的。首先对干摩擦器进行结构设计,并建立其有限元仿真模型;其次利用瞬态动力学分析干摩擦阻尼器的减振效果。结果显示:安装干摩擦阻尼减振器可以明显改善惯性测量单元的阻尼特性,使得振动幅值最大衰减率可达89%,验证了干摩擦阻尼器具有良好的减振性能。
关键词:多旋翼无人机;干摩擦阻尼;减振;瞬态响应分析
中图分类号:V279 文献标志码:A 文章编号:1003-5168(2022)5-0033-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.05.007
Vibration Reduction Design and Simulation of IMU Damper for Multi Rotor UAV
ZHOU Sujie
(Zhejiang College of Security Technology, Wenzhou 325016, China)
Abstract: In order to improve the flight stability of UAV system, a vibration damper based on dry friction effect is proposed. The purpose of dissipating vibration energy is achieved by using the contact friction between dry friction damping plate and cantilever support. In this paper, the structure of the dry friction device is designed firstly. Then, its finite element simulation model is established. Thirdly, the transient dynamic analysis is used to analyze the vibration reduction effect of dry friction damper. The results show that the installation of dry friction damper can significantly improve the damping characteristics of IMU, and the maximum attenuation rate of vibration amplitude can reach 81%. It is verified that dry friction damper has good damping performance.
Keywords: UAV; dry friction damping; vibration reduction; transient response analysis
0 引言
近年来,随着无人机产业飞速发展,民用无人机的应用越来越普及。民用无人机按照机身结构类型主要可以分为以下三类:固定翼、直升机和多旋翼。其中,多旋翼无人机由于拥有结构简单,操作性能优良以及能够实现垂直起降等优点,被广泛应用于农业植保、航拍摄影、应急救灾、物流运输以及创客教育等诸多领域[1-2]。
多旋翼無人机的惯性测量模块集成了多种传感器,主要用来感知飞行器的姿态和运动状态,与主控芯片共同实现无人机的姿态控制。其性能以及可靠性直接影响到无人机挂载的飞行安全以及正常工作状态。而多旋翼无人机一般在户外进行作业,复杂多变的飞行环境,如电机螺旋桨的振动,颠簸的气流,都可能使无人机机身受到超过自身所能承受的振动量级,严重影响到安装在机身上的惯性测量模块的正常工作,使得无人机的姿态解算出现误差,威胁机身的稳定飞行[3]。因此,有必要对多旋翼无人机惯性测量单元进行有效的振动控制,来提高飞行的稳定性和安全性。
在实际的无人机惯性单元减振研究中,误差补偿法和被动减振法常被用于降低外界振动干扰,提高惯性测量单元的测量精度[4]。由于误差补偿法是利用软硬件结合的方法,采用更精确的算法对误差进行补偿,这种方法本质上属于主动控制,经济性、稳定性不高。被动减振法则是引入隔振器或减振器来吸收或消耗能量,通常应用于追求轻量化、低成本的无人机振动控制上。
近年来,在惯性单元(惯导设备)的被动振动控制方面,国内外学者开展了大量的工作。程岩松[5]根据外部激励的频率,对某型号多旋翼无人机的惯性测量单元进行了控制系统隔振研究,通过理论数学模型给出了橡胶隔振器的安装坐标,分别通过有限元分析和振动试验,对隔振器进行了设计和验证。段宇星等[6]提出了一种适合非解耦的特殊安装环境下的无人机捷联惯组的隔振系统,通过对隔振系统的优化设计,实现隔振系统的三轴等刚度,从而削弱振动的耦合影响。Junchao Cheng等[7]提出了一种用于抖动激光陀螺位置视觉系统隔振器的设计方法,通过理论数学模型进行结构的优化设计来消除运动耦合误差,其效果通过有限元仿真分析得到了验证。Fabio Riccardi[8]对多旋翼无人机惯性测量单元的弹性阻尼系统的设计和分析方法进行了综述,通过试验和有限元的方法对设计的橡胶阻尼减振系统进行了设计和效果验证。但是上述工作的研究对象主要是隔振系统,它的原理主要是利用振动元件间阻抗的不匹配来降低振动传播。本文为改善惯性测量单元结构本身的动态特性,提高对抗外界干扰的能力,提出一种基于干摩擦效应的多旋翼无人机惯性单元阻尼减振器。主要来增强惯性单元的阻尼特性和机械阻抗,实现无人机惯性单元结构振动的有效控制,从而达到提高无人机系统的控制精度和稳定性的目的。在研究中,首先对干摩擦器进行结构设计,并建立其有限元仿真模型,利用瞬态动力学分析来对干摩擦阻尼器的减振效果进行验证,具有一定工程指导意义。
1 摩擦阻尼器的设计
本文旨在利用在传力路径上施加附加的摩擦阻尼结构,实现惯性测量单元的减振设计,通过振动位移产生的附加阻尼来降低振动响应。
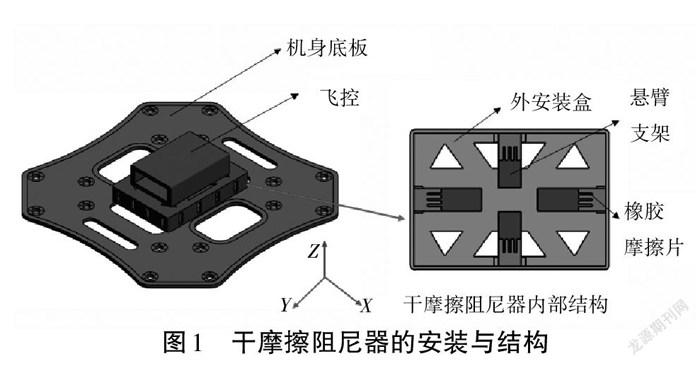
多旋翼无人机的惯性测量单元一般集成在飞控模块,通常飞控模块直接安装于机身底板上。电机的动不平衡以及旋翼周期性的气动力产生的振动通过电机(旋翼)—机身—飞控传递路径实现扩散,严重降低了惯性测量单元的测量精度。为了使飞控模块在飞行过程中避免出现过大的振动,在机身底板和飞控之间安装干摩擦阻尼器,如图1所示。
干摩擦阻尼器包括外安装盒、悬臂支架和橡胶摩擦片。本文以DAJI F450无人机为例,悬臂支架安装在外安装盒内部,橡胶摩擦片的端部与悬臂支架连接,如图1所示。振动传递至干摩擦阻尼器时,设计橡胶摩擦片的固有频率接近电机及旋翼的激励频率,增大干摩擦阻尼器的变形运动,在无人机工作过程中,将大部分的振动能量通过干摩擦的形式进行耗散,增强结构本身的动态阻尼特性,大幅降低无人机惯性单元的振动响应。
2 惯性测量单元的有限元仿真分析
2.1 有限元模型的建立
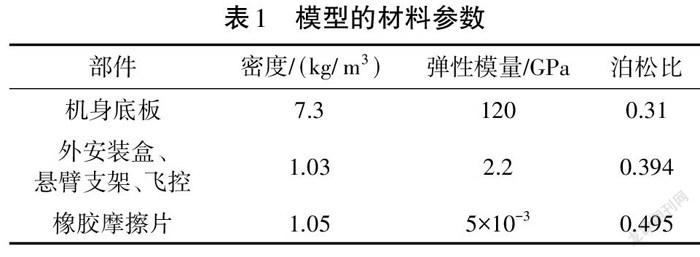
如图1所示,为了节约计算时间,根据振动的传递路径对无人机的仿真模型进行简化,省去机臂和动力部件,直接从机身进行激励。并将SOLIDWORKS的三维模型导入ABAQUS有限元仿真软件进行网格划分:整个模型共包含68 384个节点和37 044个网格,各个部分的材料属性如表1所示。
2.2 瞬态动力学分析
2.2.1 隐式动力学分析。本文将利用ABAQUS有限元软件中的Implicit动力学隐式分析对模型进行瞬态分析。隐式动力学通常采用Newmark算法对动力学方程[9]进行迭代求解,如式(1)。
[Mut+Cut+Kut=Ft] (1)
式中:[ut],[ut],[ut]分别表示节点的加速度、速度和位移矢量,[M],[C,K],[Ft]分别为结构质量、阻尼、刚度和载荷矩阵。
采用隐式算法:[t+Δt]时间下的运动状态与t时刻相关,式(1)的解转换为式(2)。
[Δui+1=Δui+Kt-1∙(Fi-Ii)] (2)
式中:[Δu]为位移增量,[Kt]为当前切线刚度矩阵。
由式(2)可知,隐式分析的计算速度与网格大小无关,但是在求解位移增量[Δui+1]时,需要转置刚度矩阵[Kt],进行增量迭代,容易出现收敛问题,导致计算中断,因此采用隐式分析时,应选择合理的增量步长。
2.2.2 仿真条件设定。本文设定隐式分析的时间增量为1×10-4 s,橡胶摩擦片与悬臂支架之间的接触摩擦系数设为0.25。
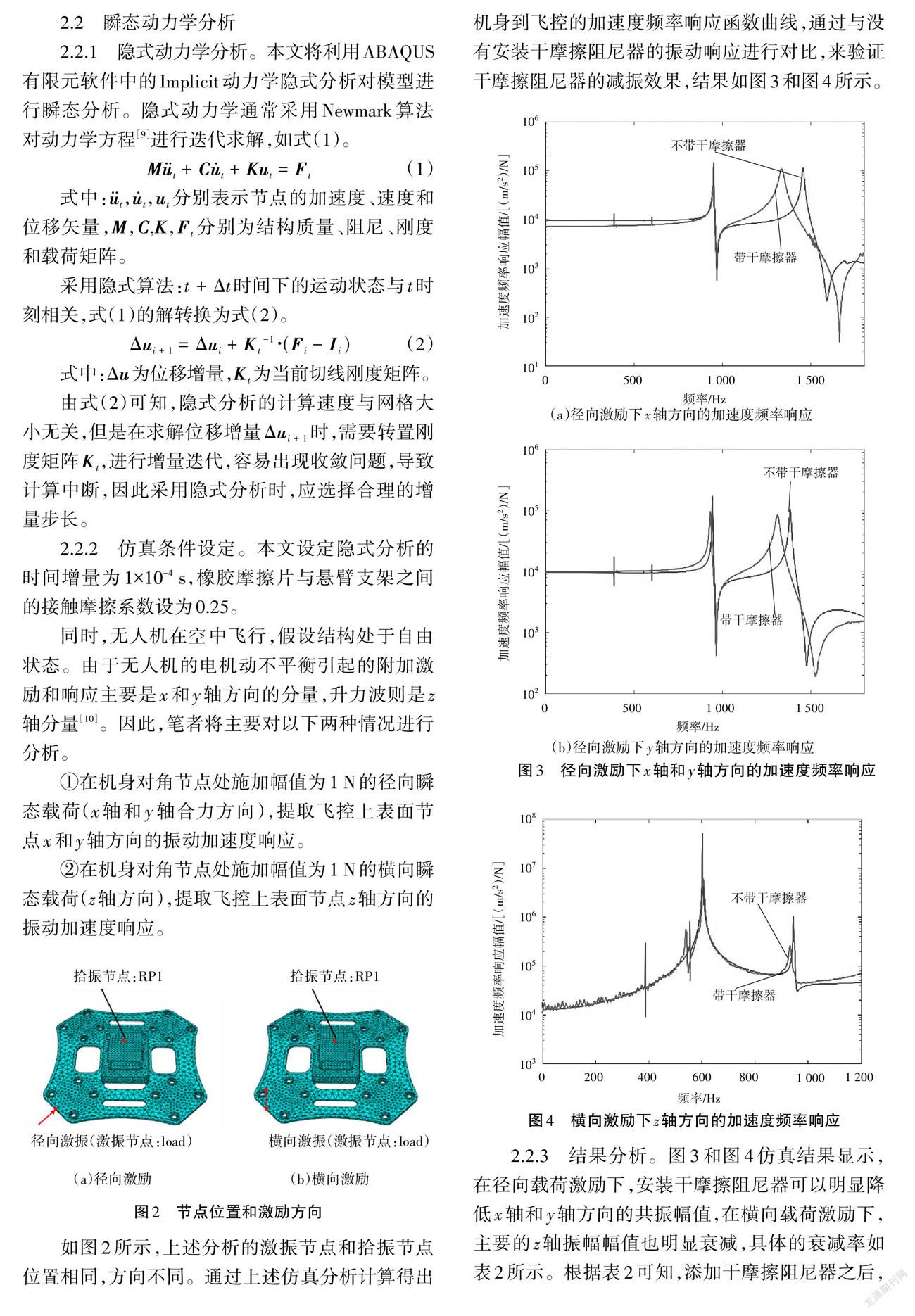
同时,无人机在空中飞行,假设结构处于自由状态。由于无人机的电机动不平衡引起的附加激励和响应主要是x和y轴方向的分量,升力波则是z轴分量[10]。因此,笔者将主要对以下两种情况进行分析。
①在机身对角节点处施加幅值为1 N的径向瞬态载荷(x轴和y轴合力方向),提取飞控上表面节点x和y轴方向的振动加速度响应。
②在机身对角节点处施加幅值为1 N的横向瞬态载荷(z轴方向),提取飞控上表面节点z轴方向的振动加速度响应。
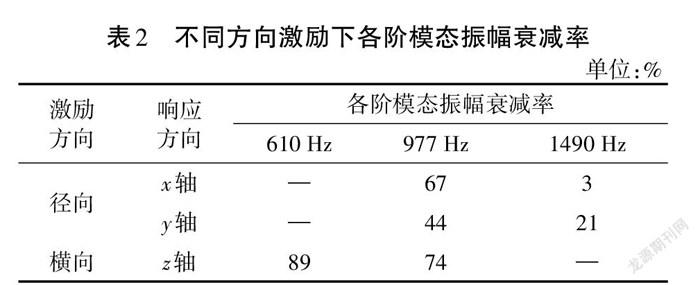
如图2所示,上述分析的激振节点和拾振节点位置相同,方向不同。通过上述仿真分析计算得出机身到飞控的加速度频率响应函数曲线,通过与没有安装干摩擦阻尼器的振动响应进行对比,来验证干摩擦阻尼器的减振效果,结果如图3和图4所示。
2.2.3 结果分析。图3和图4仿真结果显示,在径向载荷激励下,安装干摩擦阻尼器可以明显降低x轴和y轴方向的共振幅值,在横向载荷激励下,主要的z轴振幅幅值也明显衰减,具体的衰减率如表2所示。根据表2可知,添加干摩擦阻尼器之后,可以明显增强惯性测量单元的阻尼特性,尤其当飞控局部上下平动时(610 Hz,模态振型见图5),振动幅值最大衰减率可达89%。因此,上述的仿真结果对比验证了干摩擦阻尼器可以增强结构本身的阻尼特性,从而降低电机不平衡以及周期气动力帶来的振动影响,具有良好的减振性能。
当飞控局部上下平动时,飞控中央的形变最大,增加了干摩擦阻尼器与接触面之间的相互运动,减振效果更好;当飞控左右俯仰运动时(1 490 Hz),飞控两端的变形较大,中间较小,可为后续惯性测量单元的安装位置以及摩擦片的分布提供一定的思路指导。
3 结语
本文针对无人机的惯性测量单元,分析其振动激励来源、方向及其振动传递路径,提出了一种干摩擦阻尼减振器,并借助有限元仿真对比验证了其减振性能。在机身底板和飞控之间安装干摩擦阻尼减振器,可以有效增强结构本身的阻尼特性,减低结构共振幅值。仿真结果显示,当飞控局部上下平动时(610 Hz),振动幅值最大衰减率可达89%。本文的干摩擦减振器设计与仿真思路可为无人机惯性测量单元的振动控制提供一定的参考价值。
参考文献:
[1] 周苏洁,郑伟,伍玲密,等.一种无人机实飞状态下环境模拟振动测试系统:CN112193434A[P].2021.
[2] 裴彦华,白越,白晶.多旋翼无人机振动传递路径分析[J].机械设计与制造,2017(7):198-200.
[3] 吴子毅.多旋翼无人机惯性测量单元振动分析和减振设计[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2017.
[4] 牟全臣,黄文虎,郑钢铁,等.航天结构主、被动一体化振动控制技术的研究现状和进展[J].应用力学学报,2001,18(3):1-7.
[5] 程岩松.无人机控制系统隔振方法研究[D].沈阳:沈阳航空航天大学,2017.
[6] 段宇星,李笑,杨海,等.无人机捷联惯组隔振系统动力学分析与优化设计[J].中国惯性技术学报,2020(3):338-346.
[7] CHENG J , FANG J , WU W , et al. Optimized design method of vibration isolation system in mechanically dithered RLG POS based on motion decoupling[J]. Measurement, 2014, 48:314-324.
[8] RICCARDI F. Design and analysis of elastomeric vibrations for IMU on-board RUAV [J].2015.
[9] 齐威.ABAQUS 6.14超级学习手册[M].北京:人民邮电出版社,2016.
[10] 谢传锋,王琪.理论力学[M].北京:高等教育出版社,2015.
