交流电机变频调速装置的设计与研究
2022-04-12杨林初朱鹏程
付 乐, 杨林初,2*, 朱鹏程, 赵 忠
(1.江苏科技大学 机械工程学院,江苏 镇江 212003;2.东南大学 机械工程学院,江苏 南京 211189)
0 引言
现代自动控制理论与电力电子技术的迅速发展,为交流变频技术的发展提供技术支持。交流变频调速技术是通过改变交流电机的供电电源频率来调节速度,是应用最广的调速方式[1-5]。交流电机作为工业发展中常见的执行机构,在工业领域有着举足轻重的地位。当用控制理论去解决复杂的工程实际问题时,会遇到不易建立控制对象的数学模型。系统辨识就是根据系统的输入输出时间函数来描述该系统行为特性的数学模型[6]。自适应控制可以实时辨识控制对象的特征参数,实时改变其的控制策略,使其保持在最佳控制范围内。模糊自整定PID是自动实现对PID参数的调整的一种方法[7-8]。该文设计的装置不仅能对本科《机电传动控制》课程中交流电机的实验教学,还能进一步对交流电机进行深入研究。因此,该文对交流电机变频调速装置的设计与研究,有着一定的应用价值和教学意义。
1 变频调速机理分析
交流电机是将交流电转换成机械能的重要旋转设备。交流电机是由定子绕组内电流所产生的合成磁场,并且磁场是以电机转轴为中心在空间不停地旋转,交流电机绕组内的磁场就是旋转磁场,转子绕组切割磁力线。根据法拉第电磁感应定律,通电绕组产生安培力和电磁转矩,从而使转子转动起来,实现能量转换[9-10]。
交流电机转速基本公式为:
(1)
式中:n为电机转速;f为定子的供电频率;p为感应电动机的极对数;S为电机的转差率,一般S取0.06~0.015。
在电机确定时,S与p保持不变。改变频率f就可以改变转速n。该文设计的装置就是通过改变其交流输入电源的电源频率f来达到对交流感应电动机调速。这也就是交流电机变频调速的基本原理。
(2)
(3)
式中:T为额定转矩;p为额定功率;n为额定转速;J为转动惯量。
(4)
式中:F为力;l为距离;i为减速比。
将式(3)与式(4)进行拉普拉斯变换得到:
T(S)=J·2πN(S)
(5)

(6)
由交流电机数学模型:
(7)
式中:N为交流电机输出的转速(r/s);U为交流电机输入的指令电压(V);KV为交流电机的速度增益;Tm为交流电机的电气时间常数。
由式(6)与式(7)求得传递函数:
(8)
2 系统辨识与仿真
系统辨识是研究建立系统数学模型的理论和方法。从实测的系统输入输出数据或其他数据,用数值的手段重构系统数学模型的办法称为系统辨识[6]。
由式(8)可知,求得K1,KV,J,Tm等参数的值,计算出交流电机传递函数。一般可以通过电机手册查询计算出,但有些电机手册信息不全,从而无法计算出传递函数。传递函数在控制系统中起到相当重要的角色。可以通过实验法系统辨识出传递函数。
对一个惯性系统给定一个阶跃输入,对系统的输出进行采集,并辨别这个系统。(xdata,ydata)是一阶系统阶跃响应的采集的数据,xdata是时间戳,ydata是输出值。系统是阶跃响应,假定系统的传递函数是:
(9)
需要辨别的2个参数是K和Tp。该系统在阶跃响应输入下的表达式为:
(10)
则建立的函数fun如下:
fun=@(xdata,ydata)(x(1)*(1-exp(-xdata/x(2))))
(11)
它是一个指定参数的函数,需要求解的参数就是x(1)和x(2),其中x返回值是一个二元参数向量,可直接调用fun函数求得y根据时间戳生成的辨识系统的计算值。图1是系统辨识曲线,黑色的是通过本文设计的装置采集的实际速度值,红色的是系统辨识后的拟合速度曲线。
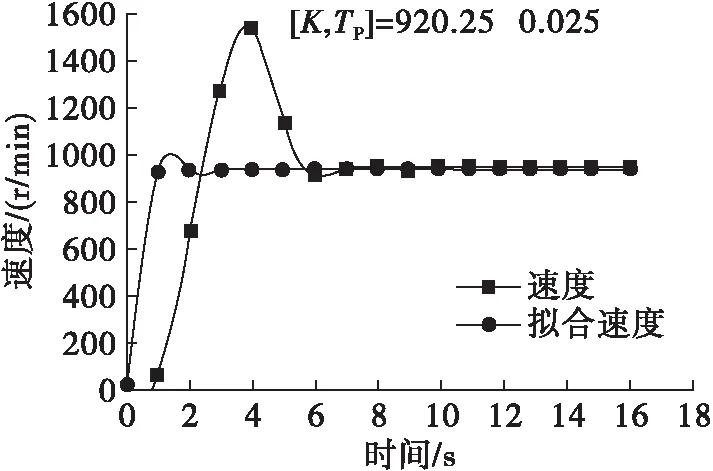
图1 系统辨识曲线
3 变频调速装置设计
用电脑中编写的软件作为上位机,PLC为控制单元,交流电机为执行元件,编码器为反馈单元。三菱PLC控制单元发出控制信号,变频器接收控制信号,控制交流电机运转。编码器采集交流电机速度等信息并传送回三菱PLC控制单元。电脑采集并输出电机响应曲线、速度等信息。图2是实验控制原理图。

图2 实验控制原理图
通过电脑中上位机将控制指令发送给控制核心单元PLC,在PLC内部进行算数逻辑的计算,将对应的数据通过DA模块转变成模拟量发送给驱动元件变频器,变频器在收到PLC发送过来的信号后对其作相应的响应,控制输出的三相交流电压源,推动执行元件小功率交流电机的运转,同时与小功率交流电机同步的编码器将实时的脉冲数据发送回到PLC内部,经过计算就可获取到实时的电动机转速,同时也构成了闭环反馈控制结构,方便增加算法进行控制。通过前期调试试验,设计出交流电机变频调速试验仪装置。图3是实验设备面板图。
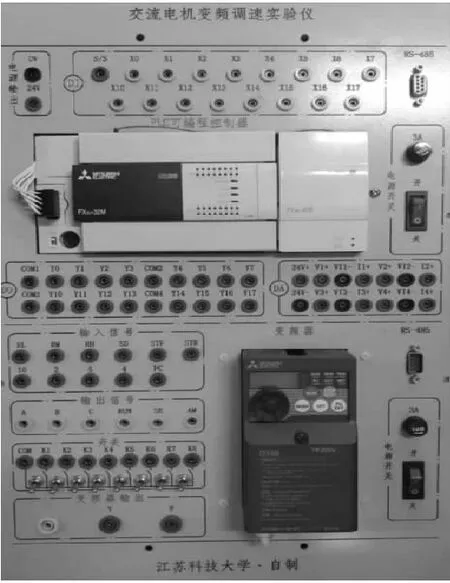
图3 实验设备面板图
4 模糊PID自整定控制
4.1 PID控制
经典控制理论中最典型的就是反馈控制系统。在常用地控制方法上,目前主要有PID控制、模糊自适应控制以及伪微分(PDF)控制算法等[11]。
PID控制基本原理是:用比例环节来提高快速响应性,用积分环节来消除静差,用微分环节来对比例环节进行修正[12]。设计PID控制方框图,传递函数为系统辨识得到,模拟实现交流电机的速度PID控制。图4是PID控制方框图。通过调节PID的3个参数,采集数据并绘制一个稳态的速度曲线,如图5所示。
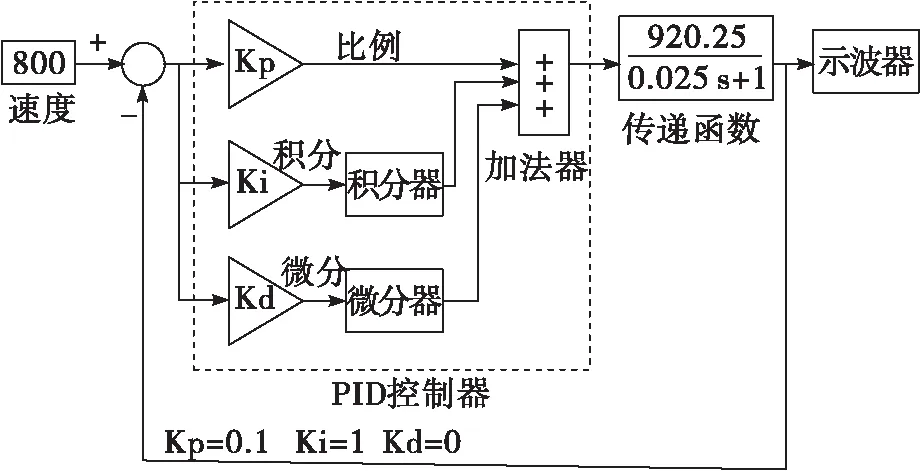
图4 PID控制方框图
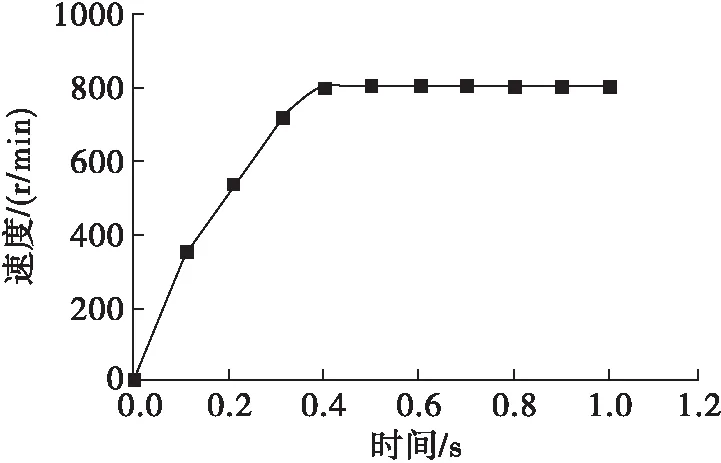
图5 速度曲线
4.2 模糊自整定PID控制
模糊自整定控制是运用模糊数学的基本知识,把规则的条件、操作用模糊集来表示,并把这些模糊控制规则以及相关信息作为知识存入控制器知识库中,然后控制器根据控制系统的实时响应情况,运用模糊推理,即可自动实现对PID参数在线调整[13-14]。
模糊PID自整定控制器用误差e与误差变化率ec作为输入,PID的3个参数为输出。模糊变量的隶属度函数选择三角形,输入、输出变量的模糊论域均为[-6,6]。量化等级均为13级,即{ -6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。取输入输出语言变量的模糊子集为负大、负中、负小、零、正小、正中、正大[15]。根据模糊 PID 参数整定原则建立模糊控制器的控制规则,导入到装置的上位机中。图6所示为模糊PID自整定控制器结构,图7为模糊PID自整定工作流程图。
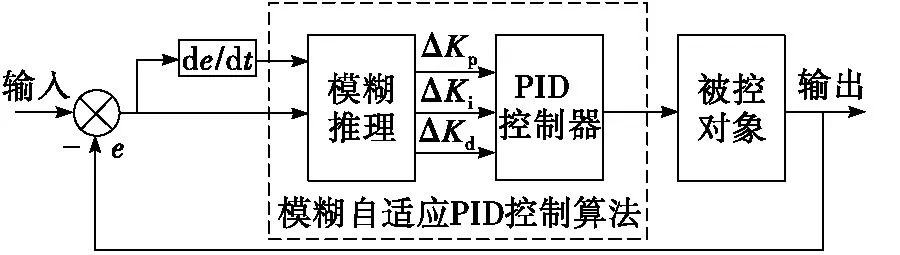
图6 模糊PID自整定控制器结构
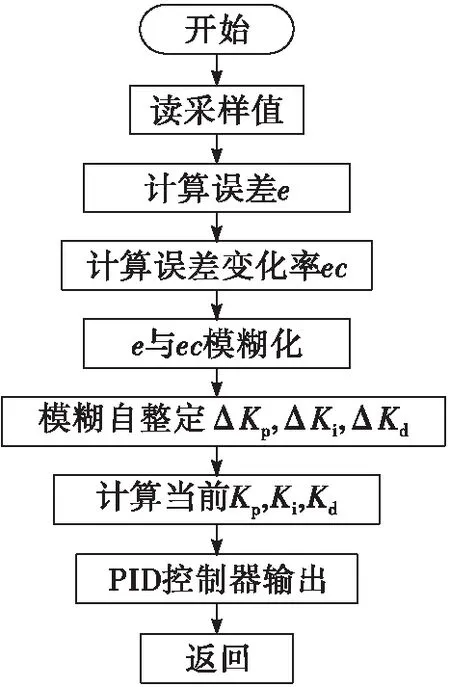
图7 模糊PID自整定工作流程图
5 实验验证
通过装置实验验证,正转和反转的低中高三挡调速实验。采集速度与频率的曲线关系如图8所示。随着频率增大,正转和反转速度都越来越快。采集电压与频率的曲线关系如图9所示。
随着频率增大,正反转交流电机端采集的电压越来越大。
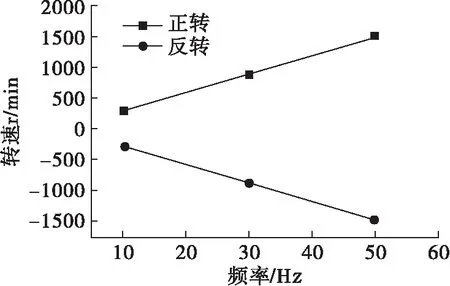
图8 n-f曲线
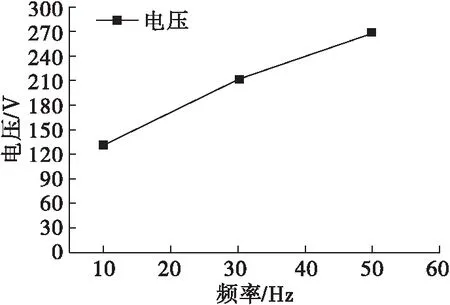
图9 u-f曲线
为了验证PID控制、模糊自整定PID控制,进行了软硬件设计。采用无级调速的方式。设计了如图10所示PID控制程序界面。图11为模糊自整定PID控制程序界面。
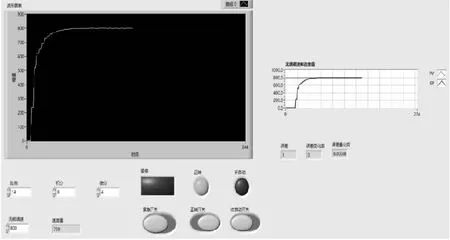
图10 PID控制程序界面

图11 模糊自整定PID控制程序界面
通过实验调试验证。PID控制:Kp为35,Ki为8,Kd为4,响应在60 ms时,速度不为0,达到稳态时间约为370 ms。模糊自整定PID控制:Kp约为34.998,Ki约为7.998,Kd为2,响应在60 ms时,速度不为0,达到稳态时间约为250 ms。图12为PID与模糊自整定PID控制震荡速度曲线。从曲线上看,模糊自整定PID控制比PID控制更优,可以将系统震荡调整为稳态,曲线更加平滑。
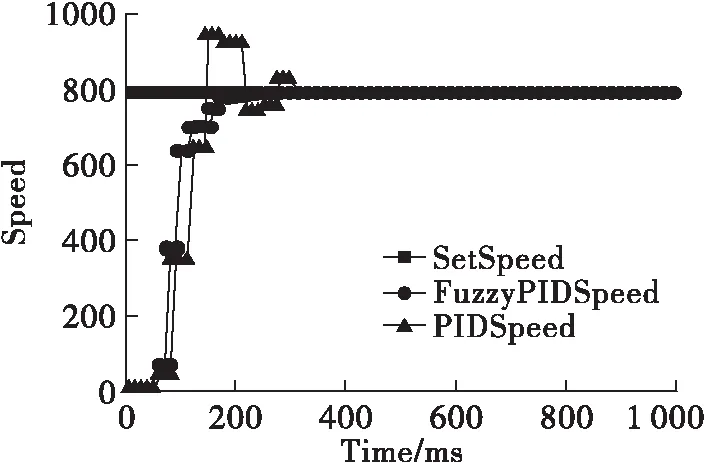
图12 PID与模糊自整定PID控制震荡速度曲线
通过实验调试验证。PID控制:Kp为20,Ki为8,Kd为4,响应在130 ms时,速度不为0,达到稳态时间约为500 ms;模糊自整定PID控制:Kp约为20.004,Ki约为7.993,Kd为2,响应在60 ms时,速度不为0,达到稳态时间约为380 ms。图13为PID与模糊自整定PID控制超调速度曲线。从曲线上看,模糊自整定PID控制比PID控制更优,响应更快,可以将系统超调调整为稳态,曲线更加平滑。
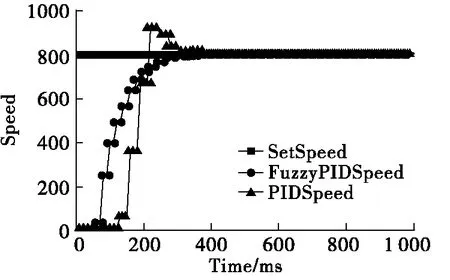
图13 PID与模糊自整定PID控制超调速度曲线
通过实验调试验证。PID控制:Kp为14,Ki为8,Kd为4,响应在130 ms时,速度不为0,达到稳态时间约为820 ms;模糊自整定PID控制:Kp约为13.998,Ki约为7.998,Kd为2,响应在60 ms时,速度不为0,达到稳态时间约为520 ms。图14为 PID与模糊自整定PID控制速度曲线。从曲线上看,模糊自整定PID控制比PID控制更优,响应更快,曲线更加平滑。图15为实验过程图。
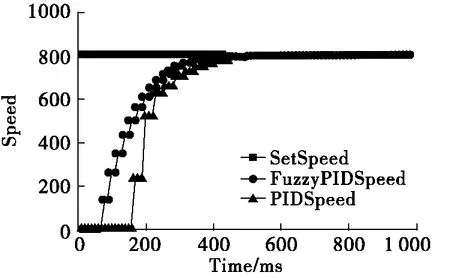
图14 PID与模糊自整定PID控制稳态速度曲线
图15 实验过程图
6 结语
该文通过对变频调速机理的分析,进行了系统辨识与仿真和变频调速装置设计,基于装置对PID控制与模糊PID自整定控制算法研究,最后通过装置进行实验,验证装置设计的合理性与算法的可行性。实验结果表明,随着频率的改变,转速也随之改变;模糊自整定PID控制算法可以实时辨识控制对象的特征参数,实时改变其控制策略,且优于系统辨识与仿真的PID控制。所设计的装置速度控制精度小于5%(100 r/min);速度控制方式有手动和自动两种;自动方式实现了0~1500 r/min无级变频调速;手动方式实现低中高3挡调速;实现PID控制及模糊PID控制。该装置适用于本科《机电传动控制》课程中部分实验教学,值得推广应用。
