水下救援机器人的设计与实现
2022-04-12龙建成彭彬烘田秀云王慧陆源张逸华陈倬彬
龙建成,彭彬烘,田秀云,王慧,陆源,张逸华,陈倬彬
(广东海洋大学 电子与信息工程学院,广东湛江,524088)
0 引言
潜水员参与救捞工作时面临着很大的风险,主要包括:水流速度大时,潜水员为了潜入水底可能需要通过携带铅块增加自身重量,增加风险;水下情况复杂多变,可能存在涡旋、残余渔网等,加大风险;一些水域环境可能存在石油污染、化工污染,对救捞人员身心伤害极大。因此在这种情况下,水下机器人下潜深度大,不受水流、水温、能见度等因素的影响,同时有一定的续航能力,可以长时间在水下工作,在应急救援中的应用也越来越受到人们关注。
1 总系统设计
本作品采用32位高性能ARM Cortex-M3处理器为核心的STM32F103ZET6作为主控芯片和树莓派B3进行图像采集。当本作品工作时,STM32芯片通过输出脉冲宽度调制波(PWM)实现对六路水下推进器的控制,再通过控制不同水下推进器的启停及速率大小实现让机器人在水下可以灵活移动的功能。操作者通过WiFi模块使PS2手柄对机器人进行远程操作,当机器人到达落水人身旁时,可以使用手柄操作机械臂对落水人进行救援。通过摄像头采集图像传回到树莓派进行处理,再传送到头戴VR设备,眼睛可以看到水下的状况,从而更准确地操作机器人对落水者进行救援。其系统结构图如图1所示。
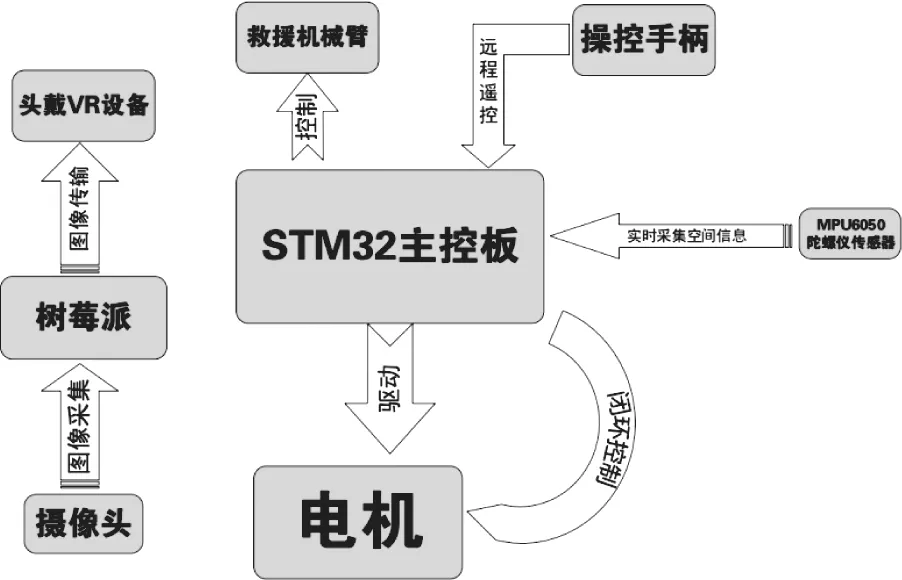
图1 系统结构图
1.1 硬件设计
我们选择内核为32位高性能ARM Cortex-M3处理器、时钟为72MHz的STM32F103芯片。STM32芯片具有512KB的FLASH存器64KB的SRAM存储器,拥有有144个引脚和112个IO,支持SWD和JTAG调试,这让STM32芯片具有强大的运算、数据处理、数据传输能力,让硬件系统可以工作。STM32多达11个定时器,每个定时器可以产生PWM输出,让单片机稳定地工作。
1.1.1主控板最小系统
主控板最小系统为STM32最小系统,使用8MHz的外部晶振作为MCU的RC振荡器,每个电源接口接一个容量为0.1μF的滤波电容,滤除交流成分,使输出的直流更平滑,防止不稳定的电源影响MCU的工作。还有BOOT设置电路、按键复位电路、J-Link接口电路。主控板最小系统如图2所示。
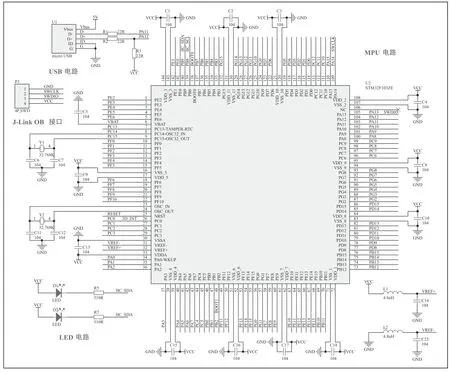
图2 主控板最小系统图
1.1.2 电源电路
电源方面采用5V的电源供电,电路中的3.3V的电由AMS1117-3.3为主芯片的转换电路提供。这种电路的可靠性高,电路稳定,可以有效地位电路供电。其稳压电路如图3所示。
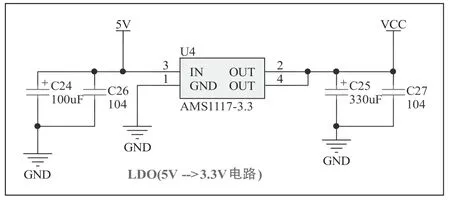
图3 稳压电路图
1.1.3 MPU6050
MPU6050是一款6轴远动处理组件,内部整合了3轴陀螺仪、3轴加速度传感器,并且含有一个第二IIC接口。利用 MPU6050 芯片内部的数字运动处理器模块,可对传感器数据进行滤波、融合处理,直接通过 IIC 接口向主控器输出姿态解算后的数据,降低运动处理运算对操作系统的负荷,同时降低了开发难度。MPU6050电路图如图4所示。

图4 MPU6050电路图
1.2 外观设计方案
机器人的外壳框架主要是由以光敏树脂为原材料的光固化打印技术打印而成的。外壳的设计是使用SOILDWORKS 2021进行3维建模。作品总长:600mm,总宽:545mm,总高:550mm。我们采用的是水下有揽操作式潜行器(水上的操作员可以通过手柄控制机器人在水下的姿态,而机器人在水下的状态数据可以通过网线传输给电脑的上位机)。并且,我们机器人的下半部分还装有摄像头和两个照明灯,除此之外,我们在摄像头下方还装有一个可以左右摆动的机械臂,用于水下的救援操作。所以,我们的作品可分为三大部分,分别是密封舱,外壳框架,机械臂。
1.2.1 密封舱的设计
因为我们的外壳有比较大面积的镂空部分,所以,我们将密封舱设计的具有一定的流线型,不仅能减少机器人行进中的阻力,而且避免水压集中在一些直角结构,从而导致渗水风险的增加。我们分别设计了两个密封舱,两个密封舱都是由透明亚克力制作而成。首先,第一个密封舱用来放置主板和一些主要的电子设备,这个密封舱后盖部分的打孔,主要用于开关接口,通讯线,烧录程序口等的连接。接口处以及舱体和舱盖的连接部分,都采用密封圈密封,增加提高密封舱的密封性。而第二个密封舱也具有一定的流线型,而这第二个密封舱的用途是用来放置摄像头,并且在这个密封舱的后面留有一个孔,用于数据线的连接。图5、图6和图7为密封舱的结构外形。
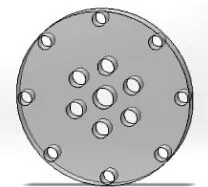
图5 密封舱后盖

图6密封舱总体结构
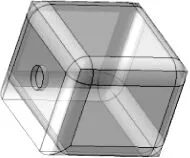
图7 摄像头密封舱结构
1.2.2 电机的布局设计
我们的外壳造型主要是球形,这不仅能减少机器人在水中行进时的阻力;而且还能使外壳的受力均匀,能在水下进行较为灵活的姿态调整。除此之外,球形的外壳,还能使机器人的重心,基本与机器人的形心相吻合,使其能在水中更好的保持稳定。至于电机的放置,我们则是在外壳的内部设计了6条通道,为了使机器人能实现在6个自由度上的调整。根据仿真计算和实测,我们采取了6电机布局。这6个电机都是防水无刷电机。如图8所示,两个电机竖直放置,主要负责提供下潜和上浮的动力,同时也可以利用这两个电机的差速实现机器人绕x轴的转动;另外四个电机则是横向放置在半球面上,当指定两个相应电机同速转动时,即可实现机器人的前进后退和左右横移,通过6个电机其中指定几个电机的差速,也可以实现机器人绕z轴和y轴转动。在水下复杂多变的环境下,我们的机器人可以通过内部的陀螺仪来控制6个电机的转速比,来实现机器人在水下的灵活运动。
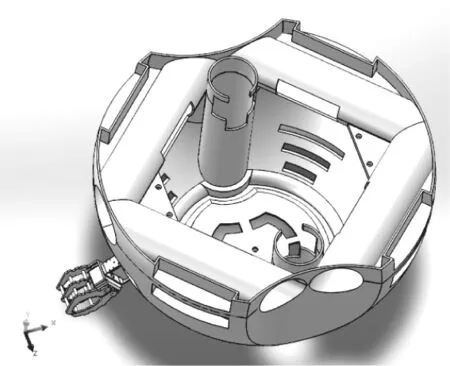
图8 外形框架结构图
2 水下机器人的功能
该机器人配备6个推进器,其电机为防水无刷电机,每一个推进器采用的是3叶螺旋桨,能够产生较强的推力,有助于提高救援的成功率。
(1)水下拍摄功能
我们采用的是透明亚克力板来密封和固定摄像头,再搭配上摄像头旁边的两个照明灯,以及通过软件算法对机器人进行姿态调整,就能够实现全方位实时清晰的拍摄了,更好地观察水下的环境。
(2)人机交互功能
水下机器人收集到水下的信息后,通过网线传输给电脑上位机,水上的工作人员,通过上位机观察到水下的环境后,再通过手柄,控制水下机器人。
(3)机械臂功能
整个机械臂由两个舵机来控制机械臂的夹持和转动,通过手柄来控制两个舵机从而控制整个机械臂。在水下,机器人下潜到求救人员的位置后,通过机械臂来实施具体的救援操作。
3 水下机器人的水下控制
PID控制结构简单,如图9所示,参数调节容易,其性能在许多场合中也可以被接受,因此PID控制仍然是水下航行器研发和操作人员广泛采用的方法。考虑到水下航行器动力学非线性的特征,还需要对线性特征的PID控制进行改进,以提升水下航行器PID控制的各项性能[1]。
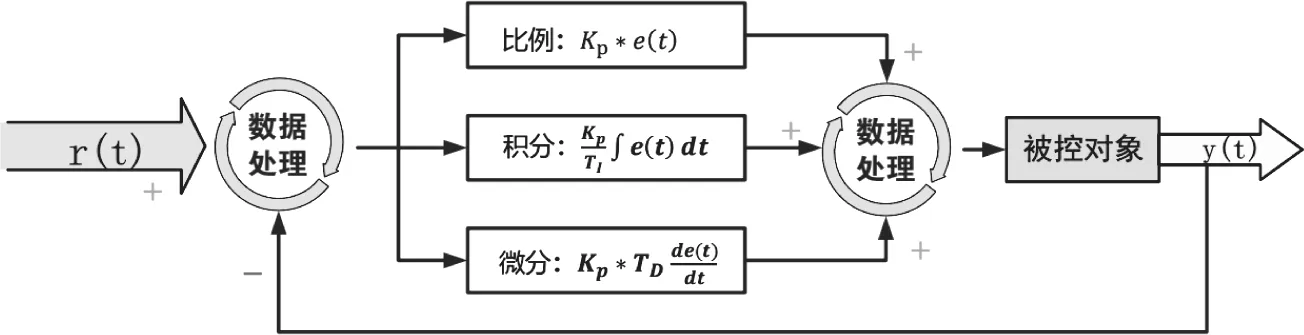
图9 PID 控制系统
比例环节的作用是调节幅值;积分环节的作用是调节稳态误差;微分环节的作用是调节超调量[2]。在水下机器人在水中行进过程中,由于系统会受到水波、水浪、延迟、图像采集误差等众多复杂的影响,微分环节必不可少。而它自身位置和水球的位置均在动态变化着,因此既定目标点也应是动态变化的。由于在水中受水的阻力影响,相当于起到一个控制滤波的作用,因此就不会存在稳态误差的概念,不必引入积分环节,而比例环节是控制系统中必须存在的,以减少误差。
为了让这一控制算法在水下机器人上起作用,我们采用了四个防水电机,两个向后主要负责前进后退的动力,同时也可利用差速实现转弯;另外两个电机朝向向上,不但用于水下机器人在水中的定深和浮潜,而且还利用机器人内部搭载的陀螺仪来进行PID平衡控制算法的调节,即可保证机器人在水下不倾斜、不翻倒、实时保持平衡,为后续其水下机械臂的操作和水下摄像等工作保证稳定状态[3]。
4 结论
在水下救援作业时候,受到水压、水波、暗流等环境变化因素的影响,从而导致机器人的水下运动有较大的不确定性。我们制作的水下救援机器人利用其本身的加速度陀螺仪和PID控制算法的结合,实现机器人在水下的定位控制、定向控制和定速控制,从而在水下自由平稳的运动。通过视频的摄录和机械臂的灵活操控,从而实现各种水下救援活动。
