基于无人机摄影技术的矿山环境修复治理研究
2022-04-08王明丽
王明丽
(河南省航空物探遥感中心,河南 郑州 450000)
无人机技术、轻型机载传感器以及计算机视觉的快速发展,使无人机成为一种新型的地理数据采集工具。近年来,无人机遥感变得更加模块化、小型化和智能,并在地形测量、精密农业、和森林监测等各个领域得到了广泛的应用[1]。将无人机用于地理数据采集具有成本低、复查周期短、采集高效、操作方便等独特优点,且可根据不同的需求配备不同传感器来实现研究区域的图像采集。此外,在数据处理上,相关数据处理软件简单易得,进一步激发了无人机在监测和监测方面具有巨大的潜力[2]。监测采掘活动后的恢复工作是许多国家对矿山公司和公共行政部门的法律要求。然而传统的检测方法多为地面实地监测,这种方法需要大量的人力物力且耗时很久,通常不足以对大型的采矿地点的大规模土地修复工作监督[3]。目前,基于无人机数据的地理环境检测已经取得了一定程度的成功,但无人机在矿山恢复领域的使用仍处于起步阶段,缺乏对现有工作的系统分析[4]。因此,本文通过无人机在矿山获取各种数据,为采矿后的矿山恢复提供持续监测的有效方法,对促进资源开发和环境保护的协调发展具有重要意义。
1 无人机摄影测量技术简介
1.1 无人机简介
无人机是一种由无线电远程操控的飞行器。在20世纪20年代,无人机首次出现在军事应用中,以取代执行危险任务的飞行员。过去,由于成本高、传感器大、耐力差、飞行控制系统复杂等缺点,民用无人机的使用发展缓慢,一些低质量的产品在21世纪初出现用于科学研究[5]。随着新技术的发展,大疆等无人机制造商的出现,迅速扩大了低成本的无人机市场。统计数据显示,目前生产的无人机数量已逐年增加,在世界和市场发展迅速。2014—2021年,民用类无人机经历了爆炸式发展,预计到2030年,全球无人机市场将达到1 500亿美元以上[6]。随着各种技术的发展,无人机的应用场景逐渐从军用过渡到了民用。许多无人机通过加装各种配置,满足了对科学研究和其他使用领域的需求。当前,无人机有很多不同的类型,如固定翼无人机、多旋翼无人机和无人飞艇,其中固定翼和多旋翼无人机在目前的科学研究中仍是主流[7]。
1.2 无人机摄影测量影像采集流程
无人机摄影测量流程如图1所示,包括飞行前资料采集、航线规划、飞行控制系统检查、数据采集、数据检查、数据处理、补飞等。

图1 无人机摄影测量流程Fig.1 Drone photogrammetry process
航线规划是无人机(UAV)可靠、安全飞行的关键。现有的路线规划方法主要基于仿真场景,其主要目标是规划最优路径,以便它消耗最小的能量,花费更少的时间,并减少无人机之间碰撞的影响。另一方面,在路径规划技术中,无人机的最优路径规划需遵循路径最优、完整覆盖、避免碰撞三大原则,其中路径最优是指系统应该具有时间效率、成本效益和效率上的最优路径[8],完整覆盖是指无人机的路径应该能够完全覆盖住需要勘测的区域,没有任何遗漏[9-10],避免碰撞是指无人机有能力检测碰撞,从而不对无人机造成物理伤害。
2 无人机测绘实地数据收集
2.1 项目概况
在某大型煤矿选取一个区域作为测绘区域。该煤矿是一个大型煤矿,煤田总面积约为56.23 km2,平均厚度为8.3 m。这里气候温和,季节分明,雨量充沛,降雨主要集中在7月和8月,年降雨量约为692 mm。所选取地区土壤类型主要为肉桂土、水分土和石灰结浆黑土等。
2.2 无人机测绘硬件
本次勘测过程采用的飞行平台为大疆御 Mavic Pro,其搭载24核处理器、双模式卫星定位系统、4枚图像传感器、1 200万像素航拍相机、三轴增稳云台以及智能电池、配备有视觉导航系统,飞行续航可达到最长27 min,最远图传距离为7 km[11]。
2.3 软件设置
当前市面上存在多种无人机数据处理软件,如Correlator 3D,UAS master,APS,Pix 4D mapper等[12],大多数软件的通用工作流程如图2所示。

图2 航测建模软件数据处理流程Fig.2 Aerial survey modeling software data processing flow
本研究采用Pix 4D mapper作为建模软件。Pix 4D mapper专业无人机测绘摄影软件,其基本架构是基于深圳大疆公司生产的消费级别飞行器[13],可协助制作3D地图和模型,在X、Y方向的精度可达厘米级别,可根据客户需求捕获多种格式的图片,如RGB,多光谱图像、热谱图像等,具有测量距离、面积和体积的功能。Pix4Dmapper可将图像转换成数字空间模型和地图,执行虚拟检查,从而使用云或桌面摄影测量平台来处理项目[14]。航线规划上,为了保证拍摄的角度垂直于地面,将无人机相机镜头设置为90°;为确保飞行安全以及清晰度,将飞行高度设置为相对地面100 m以内;为确保拍摄照片覆盖完整,将航向重叠和旁向重叠分别设置为70%和60%。飞行任务执行完后,将无人机拍摄的照片和飞行POS数据记录导出进行结果分析。
3 结果分析
三维建模流程如图3所示。建模数据如下:照片200张;连接点95 495点;密集点云91 007 948点;3D模型29 999面;DSM像素6.5 cm/pix;DOM像素3.25 cm/pix。在生成空间三维模型的基础上,可以加工形成土地覆盖图。对比不同时间拍摄的土地覆盖图,可清晰地了解到矿山恢复的情况。

图3 三维建模流程Fig.3 3D modeling flowchart
3.1 土地覆盖图
将图像进行分类是准确绘制土地覆盖图的是一个关键要求,将所拍摄的画面进行分类,分为裸露的地面、草地或低矮的灌木沟、沟壑、衰老植被或灌木<2 m、高陡峭斜坡、裸露地面上的陡坡、树木>4 m、树木2~4 m等8类,分别用不同颜色来表示[15]。为准确追踪矿山恢复情况,采集3年内同一月份数据绘制土地覆盖图(图4)。植被(包括树木、灌木和草)都被准确地绘制出来了,随着时间的增加,同一区域的主要差异是草和低灌木的增加以及裸露地面的减少,这和同一时间段内矿山的生产情况以及地面检测结果相吻合。土地覆盖类型统计见表1。
土地覆盖图提供了一个矿山恢复程度的一个快速概览,可以用来评估矿山植被随时间的变化和恢复进展。但若考虑植被结构和地形特征,还需将结果进一步细化,为此将土地覆盖图数据导出为表格。基于表格的数据及现场特征,可以分类讨论矿山的恢复程度,提出对应的恢复对策。
3.2 恢复建议
结合图4和表1可以看出,该区域近3年的裸露面积由16.4%下降到3.8%,裸露面积大大减少,但是,2019年裸露面积却有上升,这是因为该区域的开采活动于2019年截止,在开采活动截止后,裸露面积迅速下降至3.8%。草地、灌木、树木的面积均在2019年达到最低值,随后在2020年得到恢复,这充分说明了开采活动对矿山植被恢复的直接影响作用。在停止开采活动后,草地和低矮的灌木从48.4%增加到54.9%,树木从4.2%增加到5.7%。

图4 土地覆盖Fig.4 Land cover map
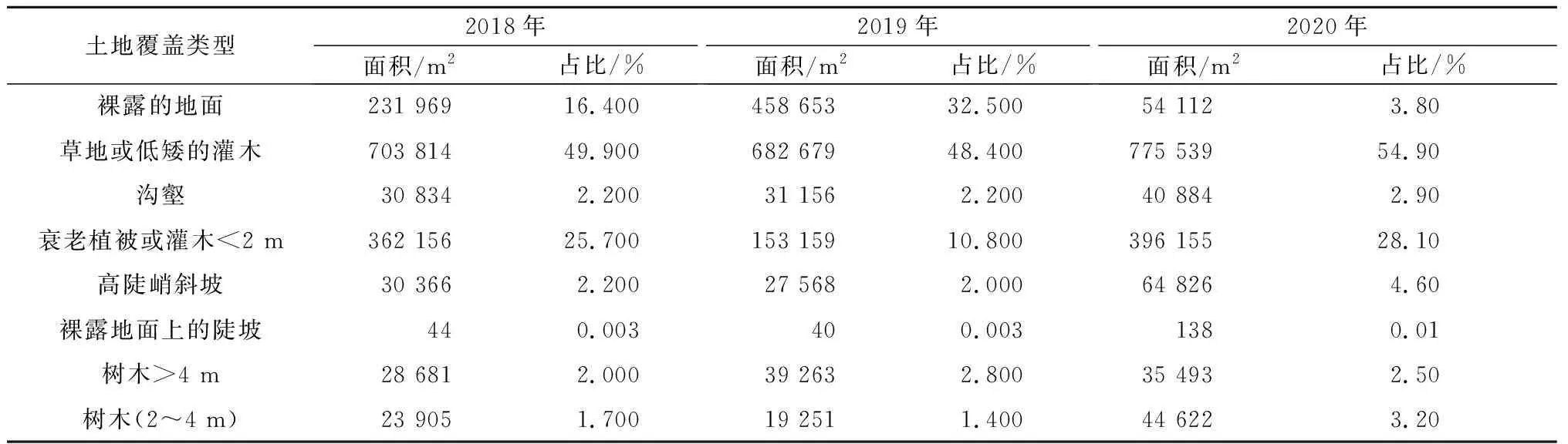
表1 土地覆盖类型统计Tab.1 Land cover type statistics
裸露地面上的陡坡面积在3年内由0.003%增加至0.01%,这说明在无人为干扰的条件下,裸露地面上的陡坡很难自行恢复植被。该区域的边坡稳定性不高,修复对策为在喷射植生基材前需要加固岩体,并设置相应措施防止喷播后水土流失,使用生态棒技术来减少后期的水土流失。
沟壑面积有所增加从2018年的2.2%增加至2020年的2.9%,这充分说明,在离开人类活动的情况下,由于水土流失等因素,会造成沟壑面积增加。沟壑带有一定的覆土厚度,需在增加覆土量基础上,结合人工栽植苗木快速提高生态恢复能力,由于该区域直接和矿山内道路接壤,因此可采用生态袋围堰覆土的方式快速形成植被生长环境。
高陡峭斜坡面积3年内几乎翻倍。典型的高陡坡区域如图5所示,该区域岩面稳定性高,表面没有浮石,坡面较为粗糙,植被恢复难度较大,在治理过程中,主要采用岩石边坡植生基材喷射技术、生态棒技术、边坡绿化棚架技术、生态边沟技术、高陡边坡生态复绿技术工艺、边坡复绿近自然施工工艺等[16-17]。

图5 高陡坡区域Fig.5 High and steep slope area
矿山生态修复本身是一个综合性较强的学科,通过无人机倾斜摄影技术对数据的采集可以获取大量的矿山现状信息,结合这些信息可以对矿山生态修复的效果进行综合评价,对后期学者建立矿山生态修复效果评价体系也提供了数据支持[18]。同时,矿山生态修复的技术也在不断更新,可以从不同矿山生态修复技术的适用和后期效果的呈现对比中,提取出最佳的边坡复绿经验,促进边坡复绿技术的改进。
4 结论
本文在系统介绍无人机遥控测绘的基础上,结合图像分析技术,开发了一种高效、可持续的矿山恢复评估系统。通过研究煤矿这一案例的数据采集、数据分析,完成了裸岩区域生态修复方案的制定和复绿区域的生态修复效果监测,针对不同该区域的地理特征,提出了适应的恢复建议。与传统人工现场勘测的方式相比,无人机勘测最终数据可以通过空间三维模型的形式直观呈现。该方法可以实现从地形勘测到数据分析,再将分析结果服务于生态修复方案设计,并对修复过程进行实时监测,最终可以对矿山生态修复效果进行评价。这项工作为进行基于无人机的矿井康复的安全性、稳定性和可持续性评估提供了一个框架和工作流程,并为未来的矿山恢复评估工作提供了一些建议。
