基于公共投放区的空面多目标攻击研究
2022-04-07张艳霞孙兆雨
张艳霞, 吕 辉, 孙兆雨
(1.光电控制技术重点实验室,河南 洛阳 471000; 2.中国航空工业集团公司洛阳电光设备研究所,河南 洛阳 471000;3.陆装驻洛阳地区航空军事代表室,河南 洛阳 471000)
0 引言
空面多目标攻击一次进入可同时攻击多个地面/海面目标,减少开舱次数、载机滞空时间和攻击航路,降低投弹时被探测概率,可大大提高整体作战能力。目前的多目标攻击主要实现方式有:基于智能算法进行寻优的多目标攻击模型[1],其综合运用蚁群算法、遗传算法和粒子群算法,该算法依赖于多次迭代计算,更新时间不可控,难以直接应用于机载实时计算环境;多目标可攻击扇区瞄准法[2],该算法实现在攻击一个指定目标的同时,能够攻击其他多个目标,适用于空战环境,但在空面攻击时效能较低。基于协同攻击区的空空作战已较为成熟[3-4],而基于公共投放区的空面多目标攻击技术研究较少,因此,本文提出一种基于公共投放区的空面多目标攻击技术。主要方法为:某航向下,根据攻击列表顺序,依次求解列表中各目标投放区与多目标公共投放区(初始为NTB(当前列表中第一个目标)投放区)的交集,若交集满足同时攻击条件,则更新为多目标公共投放区,列表遍历完成后,得到该航向下可同时攻击的一个多目标批次,依次遍历进入航向,得到能够攻击最多目标的一个多目标攻击批次,将对应的进入点及进入航向作为攻击占位信息,同理,对攻击列表中剩余目标进行求解,直到列表中无剩余目标,即可得到多个攻击批次划分结果及对应攻击航路。
1 多目标作战场景
一次多目标攻击过程如图1所示。

图1 编队多目标攻击过程Fig.1 Process of multi-target attacks
假设本次攻击规划为图1中的5个目标,根据分配给5个目标的武器类型,计算相应的单目标投放区[5],进而计算多目标公共投放区,可以看出T1和T2存在公共投放区,且可投放航路符合连续投弹条件,T3,T4,T5存在公共投放区,且可投放航路符合连续投弹条件,故将5个目标分为2个攻击批次。可见,公共投放区求解是一种进行多目标攻击的求解途径。
2 公共投放区模型研究
2.1 公共投放区
公共攻击区是以载机为中心的各个目标实时攻击区的公共部分,但该方法计算得到的多目标公共攻击区为不规则的立体空间,难以进行数学描述,不易用于工程应用[6]。
将攻击区从以载机为中心映射到以地面目标为中心,求得各目标的投放区,进而得到公共投放区,可更直观地完成多目标攻击过程,如图2所示。
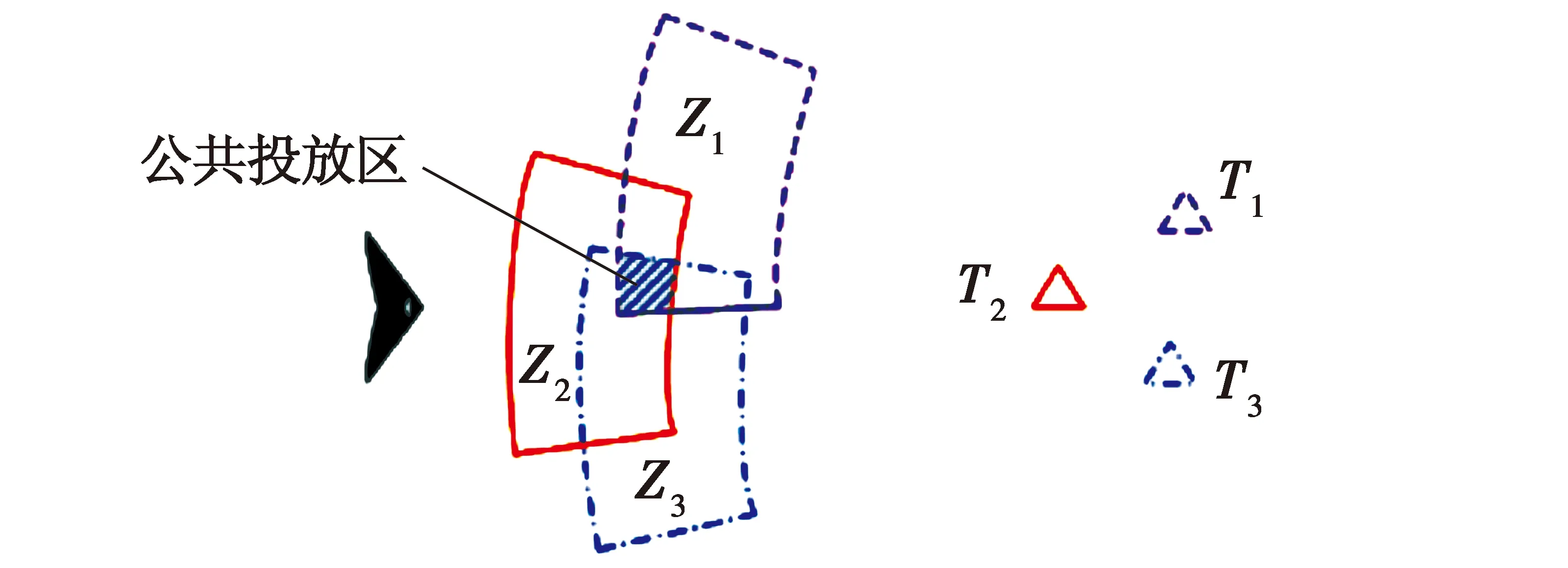
图2 多目标攻击公共投放区Fig.2 Public release zone of multi-target attacks
多目标可投放区是指在单机多目标攻击过程中,存在于预定攻击的目标集合周围的一个空间区域,载机在该区域内,只要满足投放高度、速度和姿态等约束条件,同时投放的多枚制导炸弹就能以给定精度、落角命中各自的目标,而在此区域外进行投放,就无法保证所有制导炸弹都能有效地命中目标。
2.2 公共攻击区求解模型研究
单目标投放区可以为一个多边形区域,那么公共投放区求解问题就可以看作是两个任意多边形求解问题。
以多边形1(ABCDEFGH)和多边形2(A1B1C1D1E1F1G1H1)为例说明多边形交集求解模型,如图3所示。
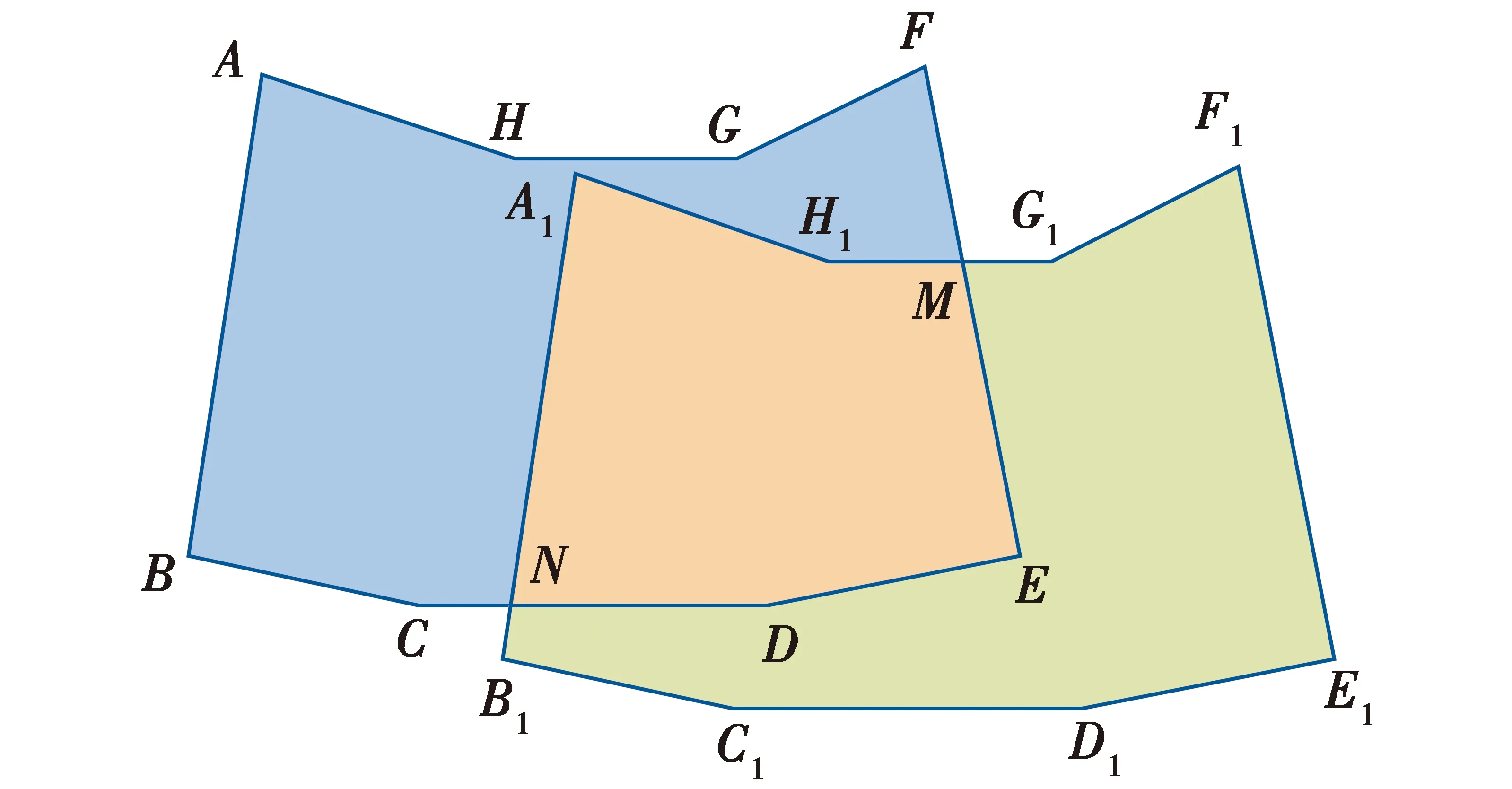
图3 多边形交集示意图Fig.3 Intersection of polygons
求解步骤如下:
1) 将两个多边形各点存储在链表中;
2) 首先遍历两个多边形各边求解的交点,若存在交点,则分别链接至对应顶点后;
3) 遍历各顶点计算公共区域,找到两个多边形公共顶点存储为交集区域的起始点,即为图中的N;
4) 求解公共投放区,从交集的表头N开始判断N和N的next1点D(在多边形1中的下一个点)的中点是否在多边形2中,若在,则链接该点,否则,改变方向,向next2点(在多边形2中的下一个点)扩展,判断M和M的next2点H1的中点是否在多边形1中,若在就继续扩展,到A1点后,A1的next2点N为起始点,多边形闭合,求解完毕。
2.3 最长攻击航路及进入点计算
假设公共投放区在NTB直角坐标系的位置如图4所示,求解进入该公共投放区的最长进入航向及对应的进入点,分为以下两种情况。

图4 最长航向计算示意图Fig.4 Calculation of heading with the longest attacking route
1) 载机航向可偏移。
在规划航路阶段,载机未进入完成该批次攻击占位,其进入点可在[Zmin,Zmax]区间内变化,求解时每隔一个ΔZ,作一条平行于X轴的直线,求解该直线与投放区的交集并从小到大排序得到交点为:x0,x1,…,x2k+1,,则对应的航路段长度为
L=L0+L1+…+Li+…+Lk
(1)
式中:
Li=x2i+1-x2i。
(2)
通过比较求得所有交线中最长的航路段长Lmax及对应的进入点坐标(x2i,z2i)及离开点坐标(x2i+1,z2i+1)。
2) 航向不可偏移。
当设定载机进入航线,在飞行航线上进行多目标攻击,此时,载机航向不可偏移,求解时,求过载机当前位置的直线z=zNTB与投放区的交集,并求解对应的最长的航路段长Lmax及对应的进入点坐标(x2 i,z2 i)及离开点坐标(x2i+1,z2i+1)。
3 多目标攻击模型研究
3.1 多目标攻击模块作战使用
多目标攻击模块与其他模块的交互关系如图5所示。

图5 多目标攻击模块与其他模块的交互关系Fig.5 Interaction between multi-targetattacking module and other modules
火控解算模块根据雷达、光雷传感器及友机、指挥中心获取的目标信息,惯导、GPS、大气机获取的载机信息,外挂获取的武器信息,以及指挥中心或长机获取的任务信息进行威胁评估,进而进行编队内目标分配,各目标攻击武器类型匹配,然后,多目标攻击模块根据当前攻击列表及匹配武器类型,进行NTB与其他目标公共投放区的解算,求解在满足攻击NTB目标的同时,兼顾攻击更多目标的目标集合及攻击进入点与最优进入航向,进而生成攻击航路,引导战斗机攻击占位[7-8]。火控解算模块将解算的多目标攻击结果、攻击航路、进入航向、攻击提示信息、攻击决策信息以及评估信息送显示器显示,在网络化复杂战场中,为飞行员提供更多、更有效的引导信息,辅助飞行员作战[9]。
3.2 多目标攻击模型研究
基于公共投放区的多目标攻击求解过程如图6所示。
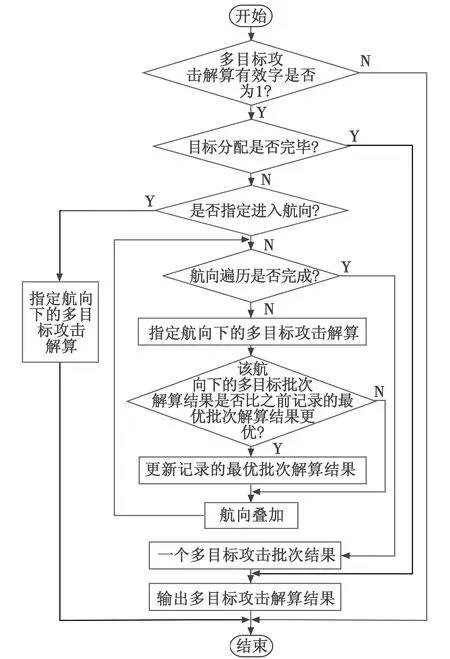
图6 多目标攻击解算流程Fig.6 Calculation of multi-target attacks
当输入的多目标攻击解算有效字为1且目标未分配完毕时,进行本次多目标攻击解算,若指定进入航向,进行该航向下的多目标攻击解算,否则,遍历进入航向,若本次航向下的多目标攻击结果比之前记录的解算结果更优(可同时攻击目标数目更多,或同样目标数目下可投放航路段更长),更新记录的多目标解算结果,否则解算结果保持不变,航向遍历完成后,得到本次多目标解算结果,包括公共投放区信息、可同时攻击的目标数、目标编号、进入航向、进入点等。同理,依次求解剩余目标可同时攻击批次信息,直至攻击列表所有目标被分配完毕,即可得到多个攻击结果及对应攻击进入点及进入航向,引导飞行员或无人机攻击占位。
由图6可知,多目标攻击解算中的关键计算模型为指定航线下的多目标攻击解算,其解算流程如图7所示。
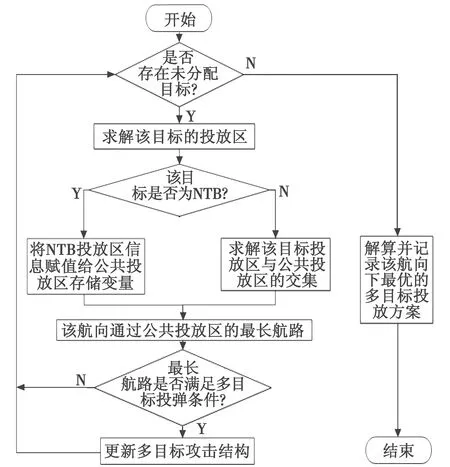
图7 指定航向下的多目标攻击解算流程Fig.7 Calculation of multi-target attacks on designated heading
首先计算NTB目标的投放区,作为公共投放区的初始解,再遍历计算非NTB目标的投放区,并将其与公共投放区进行交集运算,若交集不存在,则直接跳过该目标,若交集存在,则计算该航向通过公共投放区的最长航路,若最长航路满足多目标投弹条件,则更新计算结果,否则公共投放区保持不变;遍历完所有目标后,输出该航向下最优的多目标投放方案。
4 仿真研究
设计多目标攻击仿真软件,软件根据输入参数文件计算多目标攻击结果,并进行界面显示,验证模型设计的正确性及合理性[10]。
4.1 同种武器多目标攻击仿真(仿真1)
假设飞机携带5枚相同的卫星制导炸弹,攻击5个目标,仿真结果如图8所示。

图8 多目标攻击仿真1结果Fig.8 Multi-target attacking result of Simulation 1
图8中,红色区域为求解的公共投放区区域,蓝色线为进入航线,结果显示,本次可同时攻击5个目标以及可同时攻击的目标编号、进入航线、进入点信息等。
4.2 不同武器多目标攻击仿真(仿真2)
假设飞机携带3枚不同的制导炸弹,攻击3个目标,仿真结果如图9所示。
图9 多目标攻击仿真2结果Fig.9 Multi-target attacking result of Simulation 2
5 结论
多目标攻击的仿真试验结果说明公共投放区算法模型正确可行,系统能够正确进行多目标攻击解算,解算结果正确,达到了预期的试验目的。在待攻击目标中,依次进行多目标攻击解算,可将所有目标划分为可同时攻击的多个多目标批次,根据各批次对应的进入点,进而得到多目标攻击区航路,解算结果可以引导飞行员攻击占位及多目标攻击。
