基于图像的绝对位置编码器编解码算法研究*
2022-04-07陈文艺
陈文艺 杨 勇 杨 辉
(1.西安邮电大学现代邮政学院 西安 710061)(2.西安邮电大学电子工程学院 西安 710121)
1 引言
光学直线编码器一般由光源、条码尺、光电检测单元和信号处理电路几部分组成[1]。在条码尺编码方式上,绝对式编码器采用传统周期二进制编码是目前应用较多的一种编码方式,如循环码、反射码、格雷码等,这类编码的特点是编码位数和码道数成正比[2],为减少绝对式编码器的码道数,提出了各种改进的2 码道或3 码道编码方法,如矩阵式编码、准绝对式编码、游标式编码、伪随机码编码、M 码编码等。现在编码的研究集中在单码道编码方式上,如简码编码、位移连续码等。条码尺信号检测和处理方式与条码尺的编码方式紧密相关,主要有直接光电检测、莫尔条纹细分和图像检测三类。随着图像传感器和集成电路技术的发展,光学直线编码器采用了图像检测技术[3~4]。基于图像传感器的光学直线编码器由于直接对编码图像进行数字化,并用数字信号处理技术提取条码位置信息,极大地提高了检测精度和可靠性[5~6]。
通常条码尺难免会受到污损,采用一般的条码图像处理算法和条码解码技术难于正确检测条码位置和编码,特别是对于m 序列这种连续编码条码,虽然有连续编码定位的优点,但没有条码的起始和终止定位标志,少量条码检测错误就可能导致编码定位出错。因此,本文提出一种基于图像处理技术的抗污损、大距离和测量精度高的绝对式条码尺位置检测技术。在实验了大量算法思路,结合单码道绝对位置条码尺特点,提出了一种抗条码尺污损的新的图像处理算法,实现了条码尺位置的可靠检测。
2 绝对式直线条码尺构造原理
2.1 码元编码方法
条码尺包括宽、窄两种码元,宽码和窄码的宽度(周期)相同,实际编码波形信号幅度反应图像传感器检测到的条码尺图像的光照强度,H 和L 对应两种具有强对比的光强值。为方便解码并降低误码率,两种码元要易于区别,因此,在一个编码单元周期T 内,宽、窄码波形占空比分别为2/3 和1/3,且波形呈现偶对称,如图1所示。
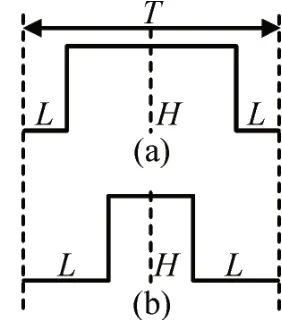
图1 编码单元:(a)宽码;(b)窄码
2.2 条码尺构造方法
m 序列由带有反馈的线性移位寄存器产生,在移位脉冲作用下,移位寄存器各级状态实时更新,其最后一级输出码元序列[7]。如图2 所示,移位寄存器状态用{ai=0,1;i=0,1,…,13}表示,{ci=0,1;i=0,1,…,14}控制反馈的通、断。14 阶m 序列的本原多项式为f(x)=x14+x10+x6+x+1,可以生成(214-1)个不全为0 的连续编码值,首尾相接即可得到绝对位置的编码序列。m 序列阶数和码元周期决定条码尺的长度,其可以制作很长。
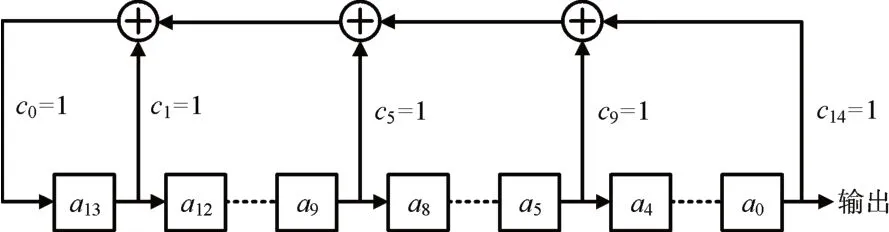
图2 14阶m序列产生原理框图
根据m序列和码元周期构造条码光栅尺,选取初始状态10000000000000,生成的m 序列部分码元 1001111011011011001111100110110010011111 01001111,构造的条码尺图像如图3 所示,条码尺图像信号波形的高、低信号幅度分别对应条码栅尺图像的白色和黑色条码,可以通过图像传感器获取条码尺的图像信号。

图3 周期T=3mm、总长49.149m局部条码尺图形
3 栅尺图像解码和绝对位置测量原理
3.1 图像预处理和载波频率检测
图像采集系统获取的一维图像信号含有噪声,对图像信号先进行灰度形态学滤波,去除噪声,滤波后的信号im_gmf 通过最大值、最小值滤波降低图像椒盐噪声,均值滤波采用领域平均方法使得信号波形变的模糊平滑,处理的结果作为自适应阈值二值化的阈值im_t,再使用此阈值对形态学滤波后的图像信号进行二值化。自适应阈值二值化图像可以保护图像的细节信息,有助于污损条码定位。二值化图像im_bin 是1bit 信号,更易于处理,同时有效地减小了光照不均对条码识别的影响。

Goertzel算法迭代公式:

能量重心公式:
f(n)是具有n个采样值的二值化图像信号,通过式(2)、(3)和(4)计算出实数Sk(n)、频率项的实部Re 和虚部Im,Pk是频点k 处的能量。通过式(5)先初步计算出频率范围[f1,f2] 的质心位置k,在k的领域各取M 个整数频点再次使用能量重心公式计算出的质心位置作为载波频率f。
3.2 相位检测和相位曲线拟合
相干相位检测法包括二值化图像信号与同频载波相乘、低通滤波和反正切计算,计算出的相位范围(-π/2,π/2 ),需要对其解包裹得到真实的相位值分布函数,如图4所示。
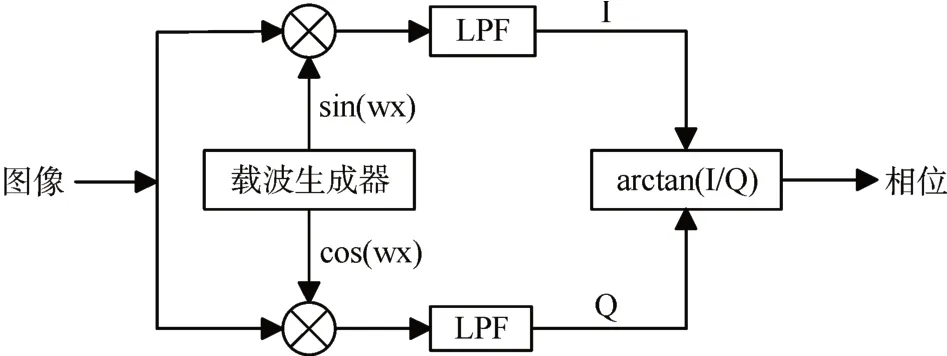
图4 相干相位检测框图
视场内整周期的相位分布在理想情况下呈线性,图像传感器安装倾斜会导致相位分布近似为二次曲线。最小二乘法运用最小化误差的平方和来逼近最佳函数曲线,使用其对相位数据进行曲线拟合,拟合样值(xi,yi),i=1,2,…,n,拟合多项式方程y=ax2+bx+c,矩阵方程:
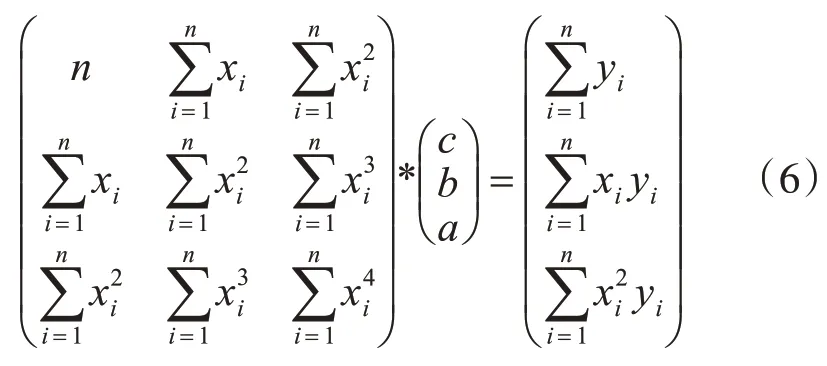
根据式(6)计算二次曲线系数a、b 和c,通过相位的二次曲线可以插补污损条码相位值。每个码元周期T 相同,可以计算整个视场内单个码元的相位分布,相位值范围( 0 ,2π ),从而可通过码元相位值定位条码位置[12~15]。
3.3 条码位置定位和解码
最小二乘法拟合出的相位二次曲线和周期T可计算出单个码元的线性相位分布函数phase,选取合适的比较值与每个码元相位值进行比较来定位码元位置。

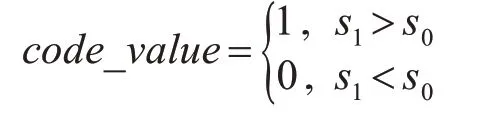
条码位置code_p确定后,通过码元占空比解码码元值,并通过原图的对比度标出错误条码。在有效条码范围内,条码位置code_p作为有效标志,参考系统时钟,以码元周期T 为单位,对二值化图像的单个码元中的高、低电平分别计数时钟周期数量s1和s0,两者比较的结果作为当前码元的解码值code_value。
3.4 绝对位置计算
算法中首先生成14 阶m 序列码,解码出的码元序列与m序列进行互相关运算,视场内条码码元数量要大于等于m序列的阶数,才能确保绝对位置检测的唯一性。
各地质背景中二叠系土壤硒含量最高,平均值为1.52mg/kg,其次为三叠系与泥盆系,分别为1.21与1.01mg/kg,最低为奥陶系,为0.57 mg/kg。可以发现,石门县各地质背景表层土壤总体硒含量较高,其土壤平均值全部达到富硒标准(0.4mg/kg)。
互相关运算公式:

视场内条码码元序列Q 与m 序列位置一一对应码元作比较,相同码元数量为A,不同码元数量为D,PP最大时所对应的m序列码元位置为绝对位置的粗测位置ap。然后,缩小m 序列范围,多次进行互相关运算可以提高测量的准确度。绝对位置精确值a_position是粗测位置、视场内光心码元偏移数量offset、周期T 和目标码元的相位偏移ph 计算的结果。

4 算法仿真验证
4.1 图像预处理和载波频率检测
灰度形态学滤波对噪声图像进行闭运算和开运算,选取的滤波窗口为9 个像素点;最大值、最小值滤波窗口为41 个像素点,窗口中像素值的最大值和最小值的算术平均值作为滤波后的像素值;均值滤波窗口为11,取11 个像素值的算术平均值作为输出像素值,各滤波模板遍历所有的像素点,灰度形态学滤波后的图像信号与阈值进行比较得到1bit的二值化图像。仿真波形如图5所示。
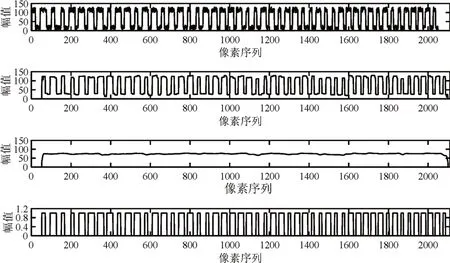
图5 原图像、形态学滤波图像、阈值、二值化图像
原图像经过灰度形态学滤波处理后去除了很多噪声,自适应阈值是动态变化的,可以保留一些图像的细节,为准备识别条码创造了条件,从图5可以看出二值化图像可以反映原始图像有效信息,也方便后续信号处理。
用于载波频率计算的初设已知整数频点范围[2 5,66] ,共计算42个频点的能量,通过能量重心公式初次计算的载波频率点k 为55Hz;在k 两边各取10个频率点,估计21个频率点的质心位置,计算的频率值f 为49.58Hz 作为最终的精确频率值,两次计算可以提高检测的精确度。
4.2 相位检测和相位曲线拟合
图像采集单元获取的一帧图像的像素点数量与图像传感器的视场扫描宽度和像素密度有关,算法仿真中样值点n取2048个像素值,对解调出的相位进行参数统计,计算出相位拟合二次曲线的系数a=-2.952×10-7,b=-2.661×10-3,c=3.205。拟合的曲线如图6所示。
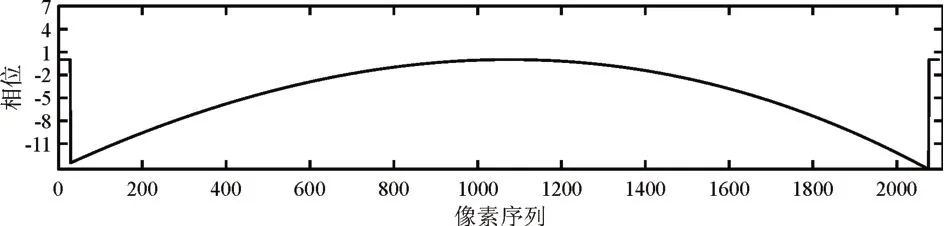
图6 相位拟合二次曲线
通过拟合的相位曲线计算单个码元周期内的相位,码元相位范围[0 ,2π] ,还可以插补污损码元相位值,相位波形呈现等间距规律锯齿状,码元相位分布如图7所示。

图7 码元周期相位分布
4.3 条码位置定位和解码
采用相位的全局信息定位条码位置,其与局部码元检测关系不大,可实现污损、错误条码位置的定位。用单个码元的相位可以定位码元位置,码元相位值与预设固定相位值比较得到的条码位置,如图8所示。
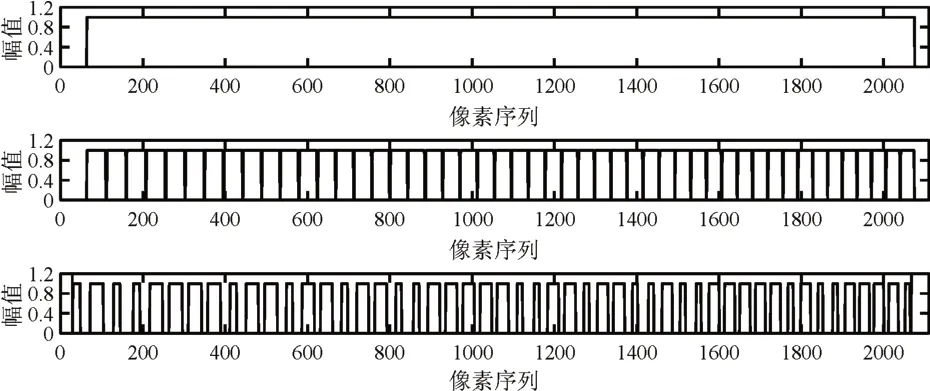
图8 条码范围、码元位置、二值化图像
5 试验结果分析
构造三种带噪声的条码栅尺图像信号,它们的码元宽度(周期)不同,码元编码方法相同,如图9所示,其符合14 阶m 序列编码规范,加载到算法模块中来验证算法的功能。
图9 带噪声的条码栅尺图像信号
图9 中的三个图像信号分别对应条码尺位置,解码后的条码值对应全局m 序列中的3 段序列,通过算法处理后的结果如表1所示。
表1 中三个频率分别是条码图像信号的载波频率,解码出的码元数目不同,是因为视场内码元宽度不同,只需码元数量大于m序列阶数。三个条码图像经过图像处理和绝对位置计算,准确地定位条码位置、解码出条码值并与波形码元相同,能够精确地计算出绝对位置。

表1 算法仿真结果
6 结语
本文提出的绝对式直线位置检测方法,编码简单,条码识别准确,对光强变化不敏感,可测距离大,算法仿真验证详实可靠。后续采用基于FPGA和接触式图像传感器建立硬件系统,获取条码图像、图像处理和绝对位置计算。还需控制运行速度以减少运动模糊对精度的影响,从而验证系统的高速、高精度和高效性。因此,算法应用前景广阔,可应用于自动化立体仓库、导轨悬挂输送机、轨道巡检机器人等定位系统。
