基于模型的无人机系统架构综合评估方法
2022-04-07卢元杰刘志敏孙智孝
卢元杰, 刘志敏, 孙智孝, 阚 东
(沈阳飞机设计研究所, 辽宁 沈阳 110035)
0 引 言
飞机总体设计的主要任务是把不同的专业和系统创造性地综合到一起,使飞机整体性能优化,达到规定的战术技术要求。传统飞机总体设计主要受飞行力学、空气动力学、结构力学等性能要求驱动和约束,所以总体方案权衡或优化一般选取飞机的几何特征或空间位置等参数作为设计变量,大多使用多学科设计优化技术开展飞机总体设计与优化。随着信息化和智能化技术在飞机上的广泛应用,飞机总体设计越来越表现出了机械化、信息化和智能化“三化融合”的技术特征,飞机越来越多的功能由机械、电子、软件等组件来共同实现。目前,飞机总体设计单位在工程上逐渐发展为采用基于模型的系统工程(model-based systems engineering, MBSE)方法来构建涵盖需求、功能、逻辑和物理等设计特征的飞机系统架构,以模型为载体,描述和定义飞机总体技术方案。
国内外众多学者针对飞行器总体技术方案综合评估开展了很多研究。Al-Ahmed等在飞机概念和初步设计中综合了作战效能。Mavris等在飞机总体方案评价准则中考虑可支付性、任务能力、可用性、生存力和安全性等5种属性。刘晓东等提出采用任务能力、可用性或战备完好性、战时生存性、安全性、经济可承受性及研制风险等作为评审指标。黄俊等基于作战能力、可靠性、维修性、保障性、安全性、生存力、适应性等性能标准和寿命周期费用,建立了作战飞机总体设计的综合评价准则,给出了评价准则的计算公式和作战飞机总体设计的评估方法。朱力立等基于效费评估的思路提出了飞机综合航电系统的综合评估准则。采用MBSE方法开展复杂系统总体方案的描述和定义是当前工程领域的发展趋势,因此从系统架构的视角开展基于模型的综合评估逐渐成为研究热点。Selva等采用系统工程方法,将架构模型作为技术决策的工具,开展了对欧洲航天局环境卫星的架构权衡。Kaslow等采用MBSE方法定义了CubeSat卫星的系统逻辑架构和逻辑元素。Cencetti等通过在MBSE环境中集成多学科优化工具,权衡系统的备选解决方案。Bagdatli等在飞机总体设计中,建立了MBSE模型与多学科优化模型之间的连接,联合开展设计空间探索与权衡。为适应飞机总体方案设计与权衡方法的发展,本文提出基于模型的无人机系统架构综合评估方法。
1 无人机系统架构建模
无人机系统架构以系统需求为输入,主要包括:功能架构、逻辑架构和物理架构。功能架构和逻辑架构采用系统建模语言(systems modeling language, SysML)定义,通过用例图、活动图、顺序图和状态机图描述系统连续和并发的行为。功能架构主要关注系统需求的完整性覆盖以及与外部施动者的交互,表现为系统黑盒建模。逻辑架构主要关注系统元素组成及其内部的交互关系,是对功能架构的聚类,表现为系统白盒建模。
物理架构建模通常涉及外形尺寸、空间位置、机电液等物理特性,是功能和逻辑架构在物理世界的映射。一般可采用CATIA、Modelica、Matlab/Simulink、AMESim等语言或工具建模。
2 系统架构综合评估流程
在传统飞机研制中,设计与评估工作一般串行开展,只有当设计工作完成之后才能进行评估,方案迭代周期长。而采用MBSE方法开展飞机研制后,可以建立基于模型的设计与评估一体化流程,以系统架构模型仿真数据直接作为综合评估模型的输入,在保证模型准确性的前提下,评估结果更接近系统真实水平。
基于模型的系统架构综合评估具体思路如下:通过对具体任务(如探测)的详细分析,抽象出其中的任务对象(如飞机和探测目标)和环境;然后对各对象的属性、操作及其交互关系进行具体的描述,进行功能、逻辑和物理架构设计,从而建立起系统架构仿真模型。在完善的评估指标体系支撑下,向仿真试验提出试验规范,生成试验用例,并综合运用仿真试验分析结果和专家经验数据进行多层次的综合评估分析。将综合评估结果反馈给飞机总体方案设计环节,为方案设计提供决策建议和迭代优化依据。基于模型的系统架构综合评估流程如图1所示。
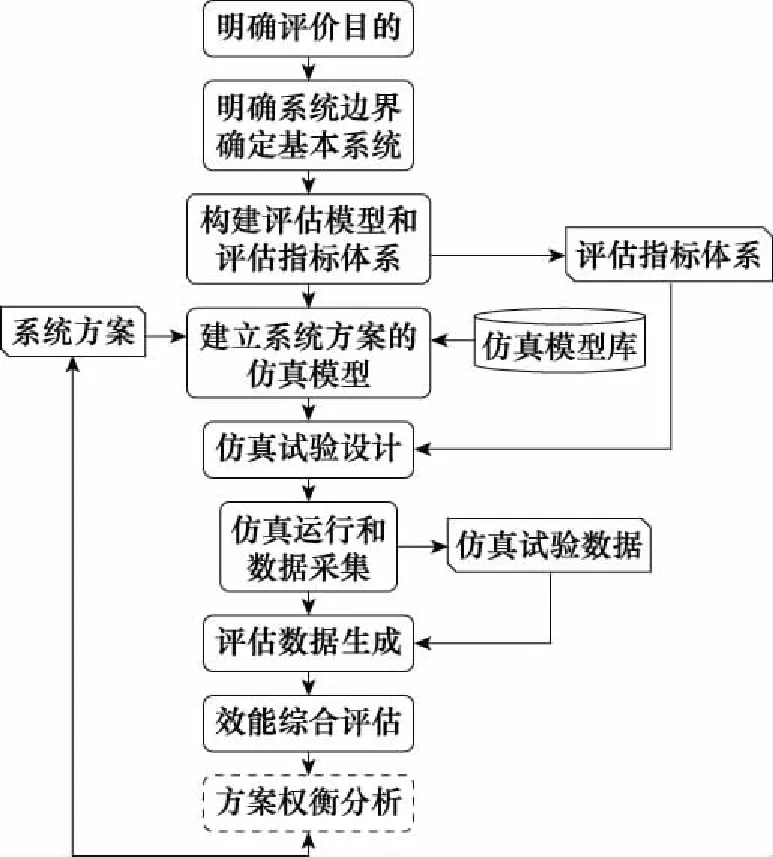
图1 基于模型的系统架构综合评估流程Fig.1 Model-based integrated evaluation process of system architecture
3 评估指标体系构建原则
3.1 全面性原则
随着商业或军事需求的持续牵引以及新技术的不断推动,飞机架构越来越复杂。因此,必须进行全面考虑,从而在目标、变量和约束间进行权衡,实现方案的最优。评估指标体系要能反映具体飞机的运行概念特点和综合运用状况,以保证综合评估的全面性和可信度。因此在建立评估指标体系时遵循如下全面性原则:
(1) 针对飞机需求,进行面向任务的完整描述;
(2) 列入对架构方案具有高敏感度的评估指标,从而能依据指标权衡方案;
(3) 在满足评估要求和给出决策所需信息的前提下,应尽量降低各指标间的耦合度,并突出主要指标;
(4) 指标应具备明确的物理意义;
(5) 指标可利用数学或仿真模型求解。
3.2 层次性原则
无人机在功能和产品分解结构方面均具有层次性,可以按产品分解为飞机级、系统级、分系统级、子系统级、设备级等。根据MBSE方法构建三级指标体系,充分反映系统在各项任务中的综合能力,保证系统在预期环境中达到任务使命。三级指标定义如下:
效能测量(measures of effectiveness, MOE)指标是对运行使用成功的度量,旨在关注任务使命达到的程度,独立于特定解决方案。
性能测量(measures of performance, MOP)指标是在特定的运行环境下,用于体现系统运行相关物理或功能属性的度量指标,与系统要求相关。MOP层应派生自MOE或其他需求,一般为明确量化的功能属性。例如速度、载荷、距离、频率等。
技术性能测量(technical performance measures, TPM)指标是系统元素的特征属性度量,是系统设计成功的关键参数,用以确定系统或系统元素满足技术需求和目标的程度,与系统实现相关。
在无人机研制中,MOE、MOP、TPM三级指标的来源、类型、获取方式以及相互关系示意如图2所示。
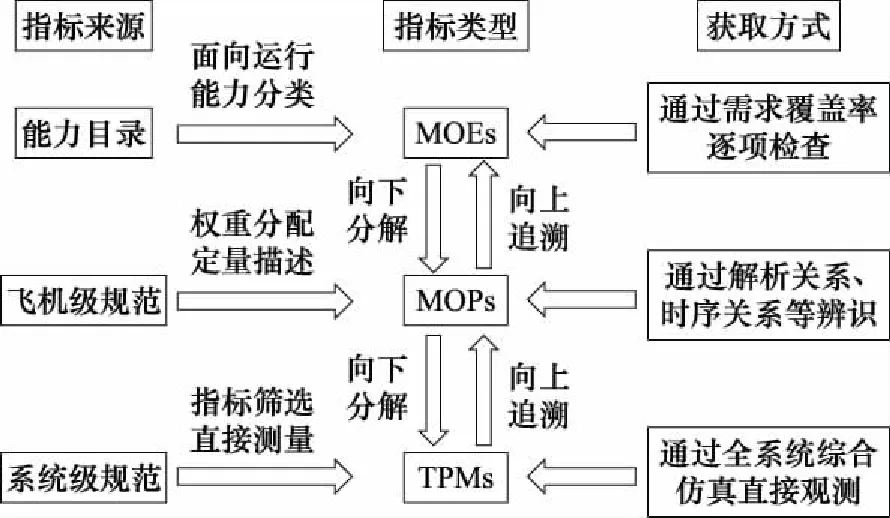
图2 无人机MOE-MOP-TPM指标关系Fig.2 MOE-MOP-TPM measures relationship of unmanned aerial vehicle
4 无人机系统架构评估指标体系
归纳总结目前国内外无人机的任务特点,根据评估指标体系全面性和层次性构建原则,建立适用无人机系统架构综合评估的三级指标体系,其一、二级指标分层示意图如图3所示。影响无人机性能的7个主要因素构成了指标体系中的一级指标,包括探测能力、生存能力、打击能力、机动能力、测控能力、任务重规划能力、保障能力等,本文将选取其中几个典型指标较为详细地介绍。
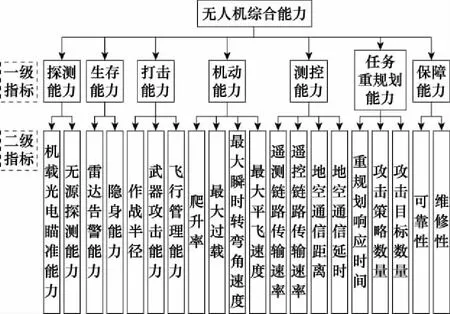
图3 无人机系统架构综合评估指标体系示意图Fig.3 Schematic diagram of integrated evaluation measures of unmanned aerial vehicle system architecture
上述指标体系中的输入有两类。第一类如传感器的探测距离、探测频率等可以由系统方案中的设计参数直接给出或基于方案设计参数通过解析模型计算得到。第二类如目标识别概率、命中精度、虚警率等,往往与系统完成具体任务的过程、目标和环境特性等相关,既不能直接由设计参数给出,也无法由解析方法给出精确的求解。对于第二类指标,通过仿真获取其数值是一种有效的手段,即通过在给定输入条件下运行模型来进行模拟仿真试验,得到的结果数据直接经过统计处理后给出指标值。
4.1 探测能力
无人机的探测能力包括主动和被动探测。对一般无人机而言,机载光电瞄准能力和无源探测能力是两个主要的二级指标。
机载光电瞄准能力主要来源于可见光、红外和激光等探测设备,可由各种探测设备的探测距离和目标识别等能力计算得出。无源探测能力可分解为探测距离、定位精度、定位收敛时间、俯仰角覆盖范围、方位角覆盖范围、目标处理容量等6个三级指标。如图4所示。
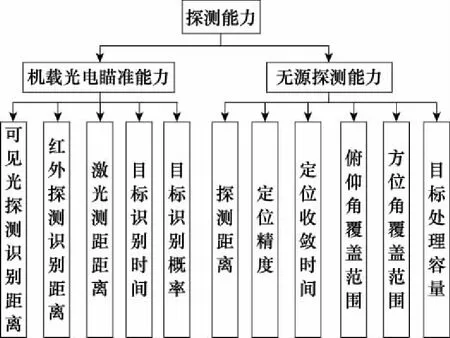
图4 探测能力指标分层示意图Fig.4 Schematic diagram of detection capability measures
探测能力指标中,各类有源、无源传感器的探测识别距离、探测频率、探测覆盖空间范围、目标处理容量等指标可由方案设计参数直接给出或由若干设计参数构成的解析模型计算得到;而诸如目标识别时间、目标识别概率、定位精度、定位收敛时间等指标除了与传感器本身的性能有关,还和探测目标对象以及传感器与目标的相对态势紧密相关,因此不容易通过设计参数直接得到。
可以建立包含无人机、目标和环境等模型的仿真系统,开展大规模的蒙特卡罗仿真或是通过试验设计设置一定条件的多样本仿真,由此获得大量探测仿真结果数据;然后基于合适的数理统计方法或解析求解模型,得到上述指标的有效值。以定位精度指标为例,其基于仿真数据的求解过程如下:

(3) 计算定位精度,即求误差序列标准差。

(1)
(2)
式中:为定位目标与传感器之间的直线距离,通过仿真数据计算得到。
4.2 生存能力
无人机的生存能力与其隐身能力、雷达告警能力密切相关。其中隐身性能是无人机的重要指标,又可以分为雷达、红外、射频3个方面。具体性能可根据无人机的自身参数计算得到,如雷达隐身性能可由各个角度的雷达散射截面积得出。
雷达告警能力反映了对敌方雷达威胁信号的告警性能,可分解为告警频率覆盖范围、告警测频精度、告警距离、告警虚警率、告警响应时间等5个三级指标。
生存能力的指标分层示意图如图5所示。
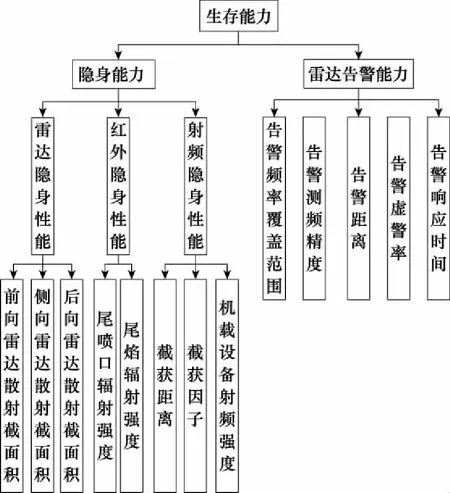
图5 生存能力指标分层示意图Fig.5 Schematic diagram of survivability measures
和探测能力类似,生存能力同样有部分指标可以由方案设计参数直接给出,如告警频率覆盖范围、告警距离等;有部分指标可以基于方案设计参数的解析模型计算得到,如机载设备射频强度、尾喷口辐射强度、尾焰辐射强度、雷达散射截面积等;另外还有部分指标则需要通过仿真数据计算得到,如告警虚警率、截获距离、截获因子等。
以尾喷口辐射强度为例,其解析求解过程如下。
尾喷口辐射强度:
(3)
=cos
(4)
式中:为尾喷口的全辐射强度;为尾喷口的全辐射亮度;为尾喷口的温度;为发动机尾喷口的发射率;为喷口截面法线与观测方向的夹角;为斯蒂芬-玻尔兹曼常数;为喷口面积。
以告警虚警率为例,其基于仿真数据求解过程如下:
(5)
式中:是由仿真数据统计得到的告警虚警率;为仿真次数;是在第次仿真中,机载传感器对目标虚警与否(虚警为1,否则为0)的仿真结果。
4.3 打击能力
无人机的打击能力可以进一步分为作战半径、武器攻击能力和飞行管理能力等3个二级指标。
其中作战半径可根据其巡航速度、巡航时间计算得出。武器攻击能力根据武器的不同种类有所不同,可分解为武器挂载类型、武器挂载数量、武器射程、武器有效毁伤半径、武器命中精度、单枚武器投放时间等6个三级指标。飞行管理能力则分为飞控能力和导航能力2个三级指标。如图6所示。
图6 打击能力指标分层示意图Fig.6 Schematic diagram of attacking capability measures
打击能力的大部分指标都可由方案设计参数直接给出或基于方案设计参数进行解析求解得到,如巡航时间、武器挂载类型等。武器命中精度则可通过开展大样本的蒙特卡罗仿真,获得大量的武器仿真落点数据,得到武器命中精度的指标值。
4.4 机动能力
机动能力是对无人机机动特性的描述,一般包括爬升率、最大过载、最大瞬时转弯角速度、最大平飞速度等4个二级指标,如图7所示。
图7 机动能力指标分层示意图Fig.7 Schematic diagram of maneuverability measures
4.5 测控能力
测控能力主要衡量地面站对无人机的遥测和遥控能力,可分解为遥测链路传输速率、遥控链路传输速率、地空通信距离、地空通信延时等4个二级指标,如图8所示。
图8 测控能力指标分层示意图Fig.8 Schematic diagram of telemetry and telecontrol capability measures
4.6 任务重规划能力
任务重规划能力主要评价无人机的任务适应性和快速响应能力,可分解为重规划响应时间、攻击策略数量、攻击目标数量等3个二级指标,如图9所示。
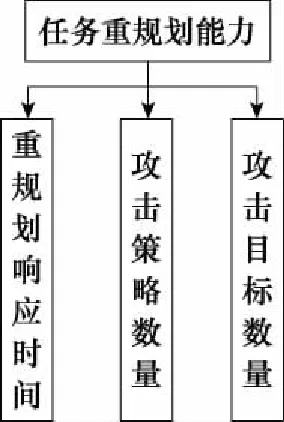
图9 任务重规划能力指标分层示意图Fig.9 Schematic diagram of task replanning capability measures
4.7 保障能力
保障能力主要通过可靠性和维修性等维度评估,其中可靠性通过平均故障间隔时间、无维修待命时间两个三级指标来描述,维修性通过平均修复时间、平均预防性维修时间、发动机更换时间、大修时间等4个三级指标来描述,如图10所示。
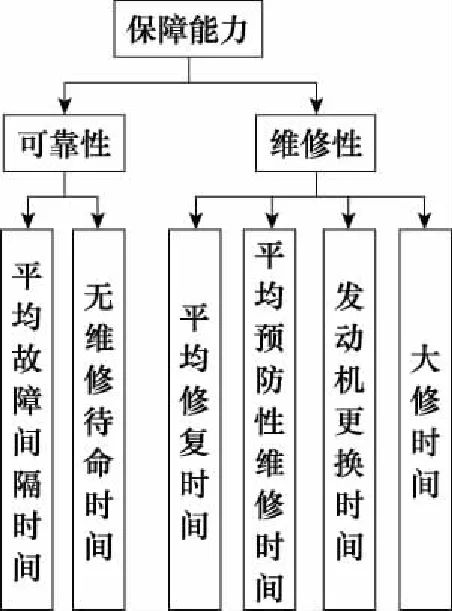
图10 保障能力指标分层示意图Fig.10 Schematic diagram of support capability measures
5 基于层次分析法的综合评估方法
在得到每一层的指标评估结果后,运用综合评估方法对评估结果进行综合分析,进而得到整个系统的综合评估结果。层次分析法(analytic hierarchy process, AHP)是一种将定性和定量分析相结合的系统分析方法,是分析多目标、多准则复杂系统的有力工具。
运用层次分析法开展综合评估,可分为以下几个步骤:
分析系统中诸元素之间关系,建立系统的层次结构,即建立评估指标体系。
在上一层准则下,对本层个元素中的任意两个元素和进行两两比较重要性并赋值,得出判断矩阵:
(6)
计算各层元素对系统的合成权重,并进行排序;根据判断矩阵,求出每一指标的相对权重,并进行一致性检验。本文采用几何平均法求权重,其表达式为
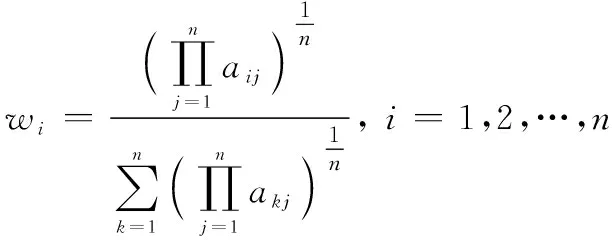
(7)
最终需要得到各个元素对于总目标的相对权重,从而进行方案选择。
6 综合评估软件实现与方案评估案例
6.1 软件系统架构
本文设计实现了一个系统架构多方案权衡软件,此软件可以基于无人机系统架构模型仿真结果和设计参数,开展总体技术方案的评估与分析工作,包括评估工程管理、指标体系管理、指标评估模型管理、综合评估等。
6.2 综合评估案例
采用本文方法对两套无人机系统架构方案进行了综合评估。两套方案在探测能力方面的指标数值来自于设计参数和架构模型仿真结果,其部分指标数值如表1所示。针对某探测任务,方案1和方案2的探测能力评分分别为5304和6218,该评估结果可支撑总体技术方案的权衡与优化。

表1 两种方案参数Table 1 Parameters of the two solutions
7 结 论
“MOE-MOP-TPM”三级指标体系符合全面性和层次性原则,具有“向上追溯、向下分解”的特征,是一种有效的无人机系统架构综合评估指标体系构建方法。通过建立系统架构模型和综合评估模型关联,将系统架构模型仿真结果如目标识别概率、命中精度等直接作为评估指标体系的输入,可以更准确评估当前系统方案的功能与性能。以模型为载体的系统架构综合评估方法,贯通了设计与评估综合流程,满足了无人机总体技术方案快速闭环设计与优化目标,可对降低研制风险、缩短研制周期、提升系统运行效能起到积极作用。
