基于单脉冲三维成像的抗交叉眼干扰方法
2022-04-07胡艳芳陈伯孝吴传章
胡艳芳, 陈伯孝, 吴传章
(西安电子科技大学雷达信号处理国家重点实验室, 陕西 西安 710071)
0 引 言
在单脉冲雷达广泛应用于军事领域,尤其是精确制导领域时,干扰单脉冲雷达一度成为电子战的研究热点。交叉眼干扰是目前为止对抗单脉冲雷达最有效的方式。它是一种通过发射两路幅度比趋近于1,相位接近180°的信号来对抗单脉冲雷达的主瓣相干干扰,使得单脉冲雷达形成严重的相位波前畸变,从而测得错误的目标角度信息。交叉眼干扰识别和对抗一直是国内外学者的研究热点之一。
现有文献主要讨论了交叉眼干扰的干扰原理及干扰性能分析,伴随着理论研究的深入与硬件技术的发展,交叉眼干扰技术开始逐步应用到不同装备平台。在交叉眼干扰的识别对抗方面,目前的公开文献较少,且主要是利用极化信息进行识别研究。文献[25-26]通过分析目标回波信号与相干干扰信号在主极化、交叉极化分量中的强度对比,对相干两点源进行识别。文献[27]利用变极化发射来调制目标回波的极化分布,并结合极化空间谱特征,可实现在多个主瓣干扰中识别目标。然而,在交叉眼干扰的对抗方面,目前仍缺少较为有效的方法。
基于上述问题,本文提出一种基于单脉冲三维成像的抗交叉眼干扰方法。单脉冲三维成像方法通过利用高分辨的一维距离像和单脉冲测角技术可以得到目标各散射点的空间位置,即目标的三维像。在交叉眼干扰的幅相特性、干信比等干扰参数发生变化时,雷达方仍可以通过三维像对干扰进行识别,并利用真实目标的团聚效应剔除由交叉眼干扰引起的目标尺寸之外的奇异点,从而有效地实施对抗。
1 交叉眼干扰机理


图1 交叉眼干扰机结构模型Fig.1 Structure model of cross-eye jammer


图2 交叉眼干扰信号传输路径示意图Fig.2 Schematic diagram of cross-eye jamming signal transmission path
假设两干扰天线与雷达天线波束中心指向的夹角分别为1和2,为干扰源相对于目标中心的半张角,为目标与波束中心指向的夹角(即目标角度),为单脉冲鉴角曲线的斜率。在理想情况下,若不考虑雷达信号幅度的衰减,也不考虑目标回波,则单脉冲雷达接收两干扰源的和、差通道信号为

(1)
由于1,2=±,可计算比幅单脉冲指示角

(2)
式中:为鉴角曲线的斜率;Re(·)表示取实部。

(3)
由式(3)可知,当幅度比→1,相位差Δ→180°时,交叉眼增益趋于无穷大,将会对单脉冲雷达产生极大的角度诱偏,达到非常理想的干扰效果。
2 基于ISAR技术的回波信号模型
2.1 ISAR距离-多普勒成像原理
为使得单脉冲雷达在距离维和多普勒维同时形成高分辨并分开目标各散射点,本文引入逆合成孔径雷达(inverse synthetic aperture radar,ISAR)技术。为方便说明,仅对二维平面的转台成像原理进行分析。目标相对于雷达的径向速度为。设目标围绕目标转动中心以角速度转动,旋转平面为-平面,雷达到中心的初始距离为。设在= 0时刻目标上有点(,),为目标与轴(即距离向)的初始夹角。在时刻,点旋转了角度,此时散射点与轴的夹角为()=+。雷达成像的示意图如图3所示。
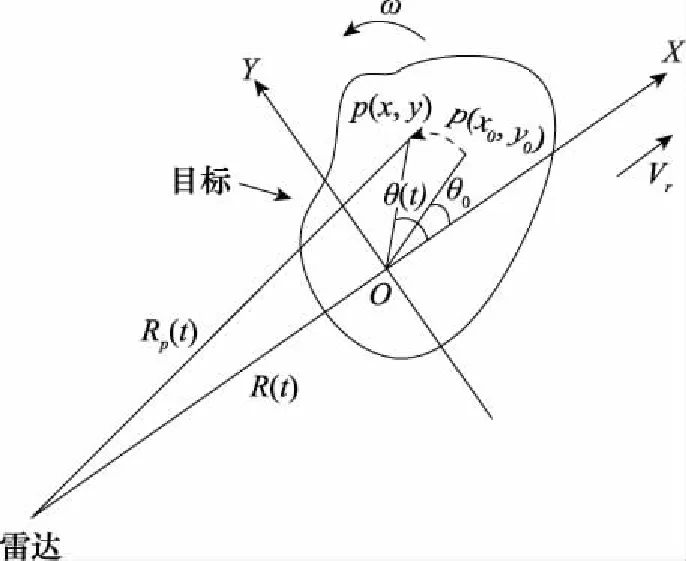
图3 雷达成像几何平面Fig.3 Geometric plane of radar imaging
在时刻,点的坐标值(,)为
(4)
在时刻,点与雷达之间的距离为

(5)
在远场条件下,式(5)可近似为
()≈++cos()-sin()
(6)
目标的多普勒频移为

(7)
式中:为波长。
可见,多普勒频率由两部分组成,其中,为目标平动引起的多普勒频移,为目标的转动引起的频移。在实际ISAR成像中,目标相对于雷达的运动可分为两部分:第一部分是目标沿雷达视线方向的平动;第二部分是目标相对于转动中心的旋转运动。其中,第一部分的平动会使得目标距离像出现距离走动,因此必须对平动分量进行补偿。第二部分中雷达与目标之间存在方位角的变化,使得可以分辨方位向的散射点。
2.2 多散射点目标信号模型
交叉眼干扰信号传输路径示意图(三维)如图4所示。假设真实目标有个散射点,散射点均位于主瓣内,雷达一个相干处理时间内发射个脉冲。目标相对于雷达的径向速度为。设单脉冲雷达天线和方向图为(,),方位差方向图为Δ(,),俯仰差方向图为Δ(,)。雷达发射信号为,雷达天线增益为,波长为,雷达发射功率为,(=1,2,…,)为第个目标散射点的目标反射截面积。两干扰增益分别为和。为雷达发射第个脉冲时第个目标散射点与雷达的距离,=1,2,…,,=1,2,…,,目标散射点与单脉冲雷达天线波束中心的方位维和俯仰维夹角分别是、。两干扰机与雷达的距离分别为1和2。两干扰分别置于机翼两侧,且相距为。两干扰机与天线波束中心的方位维和俯仰维夹角分别为1、2和1、2。
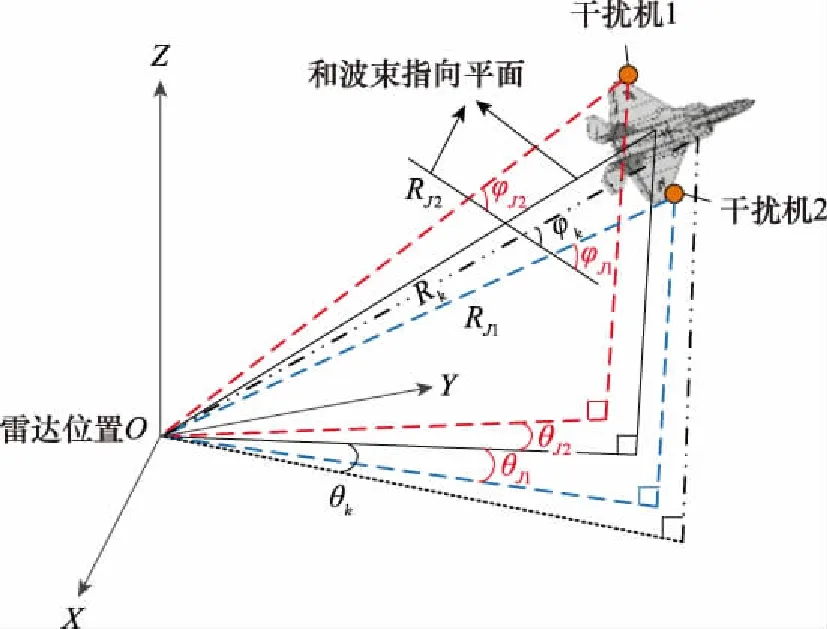
图4 交叉眼干扰信号传输路径示意图(三维)Fig.4 Schematic diagram of cross-eye jamming signal transmission path (3-D)
为清楚地分析信号的衰减过程,先考虑接收的第个脉冲仅含干扰的回波信号,假设单脉冲雷达与交叉眼干扰设备的收发天线均为全向天线。
由图4中的传输路径可知,第个脉冲仅含干扰的和、方位差、俯仰差信号:

(8)
式中:
=(1,1)(2,2)

(9)
Δ=(1+2+)c
Δ为第个脉冲的干扰回路的时延,为脉冲重复周期,1、1与2、2分别为两个干扰机在转台上的坐标。
第个脉冲的和、方位差、俯仰差通道总回波信号为

(10)
式中:()、()、()分别为第个脉冲仅含干扰的和、方位差、俯仰差信号;()、()、()为第个目标散射点的第个脉冲的和、方位差、俯仰差信号,可分别表示为

(11)
其中,Δ= 2c为第个目标散射点的第个脉冲的时延。
由式(11)可知:
=+(-1)+cos[(-1)]-sin[(-1)]
(12)
式中:为初始时刻转台中心与雷达的距离;、为目标散射点在转台上的坐标值。
3 单脉冲三维成像对抗交叉眼干扰的方法
单脉冲三维成像对抗交叉眼干扰方法流程图如图5所示。单脉冲雷达接收到和、方位差、俯仰差3个通道信号后,结合ISAR技术并运动补偿,在距离维和多普勒维同时对目标进行高分辨处理,此时各散射点得以分辨。然后对各散射点进行单脉冲测角,可得到各散射点的方位角和俯仰角。一般目标与雷达的距离是可测的,结合测得的方位角和俯仰角,可得到单脉冲三维成像的关键信息,即方位面相对距离和俯仰面相对距离。利用距离、方位面相对距离、俯仰面相对距离3个维度的信息可对目标进行单脉冲三维成像。通过所得目标的三维像,利用目标团聚效应给定合理的阈值选取准则来划分有、无干扰区域,进而实现干扰对抗。剔除由交叉眼干扰引起的阈值之外的奇异点,从而提取出干扰对抗后的目标角度。

图5 单脉冲三维成像对抗交叉眼干扰方法流程图Fig.5 Flow chart of an anti-cross-eye jamming method based on monopulse radar 3D imaging
假设目标与雷达的距离为,方位角为,俯仰角为(={},={},=1,2,…,,为超过检测电平的散射点数目)。方位面相对距离、俯仰面相对距离分别为

(13)
式中:={};={};={}。
方位角与俯仰角中存在干扰引起的角度奇异值,导致方位面相对距离与俯仰面相对距离这两参数中出现成像奇异值。可以通过以下准则找到与中对应无干扰区域元素下标:

(14)
式中:∩为交集运算;是在方位面相对距离中选取的阈值(简称方位面阈值);是在俯仰面相对距离中选取的阈值(简称俯仰面阈值)。
由于目标散射点主要集中在目标的尺寸范围之内,而干扰引起的奇异点在目标的尺寸范围之外,可以利用目标的团聚效应选取合适阈值来划分有、无干扰区域。方位面阈值如下:

(15)

同理,俯仰面阈值的选取准则为

(16)

因此,无干扰区域的方位维相对距离与俯仰维相对距离可表示为

(17)

与之对应地,无干扰的方位角、俯仰角为

(18)
4 仿真实验及分析
假设目标的三视图模型如图6所示,两个干扰机被放置于飞机机翼两侧,单脉冲雷达在一个相干处理时间内发射2 048个LFM脉冲信号。仿真参数如表1所示。

图6 目标三视图Fig.6 Three views of the target

表1 仿真参数设置
图7给出了交叉眼干扰后目标的方位角、俯仰角结果,可以看出方位维与俯仰维测角结果都出现了干扰奇异值。交叉眼干扰后的目标三视图如图8(a)、图8(b)、图8(c)所示,明显可以看出目标尺寸之外存在干扰奇异点。图8(d)为交叉眼干扰后的ISAR像,目标附近存在干扰强散射点。

图7 交叉眼干扰后的方位角、俯仰角Fig.7 Azimuth and pitch angles after cross-eye jamming

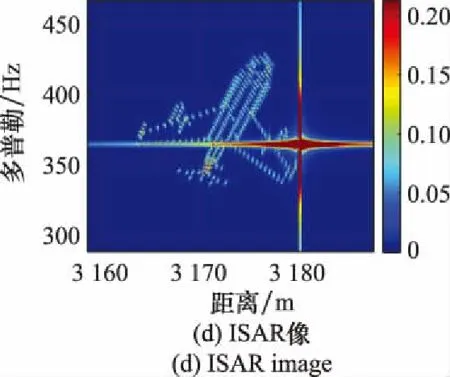
图8 交叉眼干扰后的目标三视图、ISAR像Fig.8 Three views and ISAR image of the target after cross-eye jamming
根据第3节的阈值选取准则,分别设定图8(a)、图8(b)的阈值为34.1 m、4.6 m。对奇异点进行剔除,对无干扰的点予以保留,即实现了对抗交叉眼干扰。抗干扰后的方位角、俯仰角和目标三视图如图9、图10所示,可以看出抗交叉眼干扰后的目标三视图与原始目标三视图一致。

图9 抗交叉眼干扰后的目标三视图Fig.9 Three views of the target after anti-cross-eye jamming

图10 抗交叉眼干扰后的方位角、俯仰角Fig.10 Azimuth and pitch angle after anti-cross-eye jamming
5 结 论
本文提出一种基于单脉冲三维成像的抗交叉眼干扰方法。该方法通过ISAR技术,对目标实现距离-多普勒两个维度的高分辨处理,再利用单脉冲雷达测到的方位角和俯仰角计算得到方位面相对距离和俯仰面相对距离,结合距离信息,实现单脉冲三维成像。利用三维像的目标团聚现象,剔除阈值之外的交叉眼干扰引起的奇异点,实现了抗交叉眼干扰。
