基于电动直线负载模拟器的排气压力模拟
2022-04-06范爱民常思勤陈慧涛
范爱民,常思勤,陈慧涛
(1.南京理工大学机械工程学院,南京 210094; 2.淮阴工学院交通工程学院,淮安 223003)
提高内燃机的有效效率对于降低燃油消耗和二氧化碳的排放具有重要意义[1]。可变配气技术是提升内燃机热效率的前沿技术之一,在发动机中应用电磁全可变配气机构实现气门升程、气门相位全工况下连续可变的全柔性化调节,有效提高发动机的动力性、经济性和排放性能[2]。
电磁驱动配气机构在实际运行过程中会受到许多未知扰动的影响,尤其在排气门开启初始阶段,由于缸内外压力差,排气门开启时需要克服气体压力的影响,且不同运行工况下,排气门受到的气体压力变化也比较大。因此,在研究排气门运动控制策略时,缸内外气体压力差对排气门运行的影响不可忽略。而在实验室条件下,考虑采用电动直线负载模拟器对排气门开启过程中气门所受到的压力变化进行模拟,验证电磁驱动排气门运动控制策略的可行性,从而避免直接在发动机试验台架上进行试验[3]。
虽然电动直线负载模拟器具有中小负载信号跟踪能力强、系统性能稳定、体积小且对环境无污染等优点,但是对于被动加载系统而言,由于电动直线负载模拟器在进行排气压力模拟时,动子需要被动地跟随排气门运动,会引起很强的附加耦合作用,即多余力,从而影响加载精度[4-5]。为了消除多余力的影响,刘晓琳等[6]提出一种基于神经网络辨识器及控制器的复合控制结构,有效提高系统的控制精度,多余力消扰率达92%;文献[7-9]通过采用多闭环反馈和前馈补偿相结合的复合控制策略有效抑制了多余力矩;代光明等[10]提出一种比例-积分-微分(proportion-integration-differentiation,PID)控制与迭代学习控制相结合的加载力矩复合控制策略,提高了力矩加载精度和鲁棒性能。
鉴于此,现针对电动直线负载模拟器存在的多余力干扰问题,结合系统的工作原理与结构特点,构建以电磁直线执行器为核心的电动直线负载模拟平台控制系统,对排气门开启过程中受到的气体压力变化规律进行研究,设计合适的控制策略,从而实现电磁驱动排气门在实际工作过程中所受气体压力的真实模拟,为后续研究电磁驱动排气门的控制策略奠定基础。
1 电动直线负载模拟器
1.1 试验方案
电动直线负载模拟装置主要由两个对拉的电磁直线执行器组成,且这两个直线电机参数相同,如图1所示。两个电磁直线执行器一个作为电动直线负载模拟器,另一个用来模拟电磁驱动排气门,取消了排气门阀杆,两者之间采用刚性连接。通过对电动直线负载模拟器线圈电流的大小和方向进行控制,来模拟排气门在开启过程中所受的气体压力。由于该电动加载系统属于被动加载系统,负载电机的动子随排气门动子运动,因此将位移传感器与电磁驱动排气门相连,用于对两个直线电机的动子位置检测。而由于电动直线负载模拟器在负载力加载的过程中,属于被动跟随运动,难以对动态负载力进行检测。因此,结合电磁直线执行器的工作原理和牛顿第三定律(作用力与反作用力定律),负载电机的力加载是通过动圈中的电流控制产生的电磁力,因此作为负载电磁直线电机的定子部分的永磁体同时也受到了大小相等、方向相反的作用力,而永磁体所受到的力是便于测量的,因此可以将负载电机与力传感器刚性连接,从而可以间接获得负载力加载的情况。

图1 电动直线负载模拟装置装配图
通过电动直线负载模拟装置模拟排气门开启时所受到的气体压力,一方面,可以避免由于系统和试验结果的不确定性给发动机台架带来损坏;另一方面,以电动直线负载模拟器构建的试验平台,具有结构简单灵活、可重复性高和成本低等优点,通过对电动直线负载模拟器进行控制,可以实现各种工况下的气体压力模拟,大大方便了排气门运动算法的调试和验证工作,另外该负载模拟平台还可以用于测试系统的鲁棒性研究等方面。
1.2 数学模型
电动直线载模拟器和电磁驱动排气门的核心机构均为电磁直线执行器,其工作原理以及性能特点可以参照文献[2]所述。电磁直线负载模拟器可以看作机械、电路和磁路相互耦合的子系统,下面对电动直线负载模拟器的数学模型展开分析。
首先,对机械子系统进行分析,电动直线负载模拟器的运动部件受力分析如图2所示。

图2 电动直线负载模拟器受力分析
根据牛顿第二定律可以得到机械子系统的运动平衡方程为
(1)
式(1)中:m2为运动部件的总质量,在电动直线负载模拟系统中,排气门取消了气门阀杆,直接与负载模拟器动子通过连接杆刚性连接,可以看作一个整体;v为运动部件的速度;FL为负载模拟器提供的负载力;Fm2为负载电机所受到的电磁力;Ff2和Fd2分别为运动部件受到的摩擦力和扰动力,可以看作与运动部件的速度成正比,表示为Ff2+Fd2=c2v,其中c2为阻尼系数。
其次,电动直线负载模拟器的电路子系统可以看作一个电阻和一个电感串联而成,可以得到电路子系统的电压平衡方程式,即
(2)
式(2)中:u2为线圈两端的电压;i2为负载模拟器的线圈电流;R2为电阻,L2为线圈电感;e2为反电动势,其大小可表示为e2=kev,ke为反电动势系数。
电动负载负载模拟器的动子(通电线圈)在磁场中运动受到洛伦兹力的作用,由安培定律可以得到电磁力,表达式为
Fm2=kmi2
(3)
式(3)中:km为电磁力系数,其数值与反电动势系数相等。并且电动直线负载模拟器的系统参数如表1所示。

表1 电动直线负载模拟器系统参数
根据电动负载模拟器的运动平衡方程[式(1)]、电压平衡方程[式(2)]和电磁力方程[式(3)]可以得到电动直线负载模拟器的微分系统方程组为
(4)
对式(4)进行拉氏变换,可以得到电动负载模拟器的传递函数为
(5)
根据传递函数[式(5)]可以画出电动直线负载模拟器的方框图如图3所示。
2 负载力加载控制策略研究
2.1 多余力的产生和抑制方法
由于电动直线负载模拟系统是典型的被动式力加载控制系统,其多余力产生的原因如下:被加载对象电磁驱动排气门,按照一定的气门运动规律运动,电磁直线负载模拟器动子通过连接杆被迫与排气门动子相连,一同运动,也就是说负载电机的运动规律与排气门运动规律一致,而与负载电机的控制作用无关。在电动加载系统中,多余力通过两方面影响输出的负载力。一方面是通电线圈中产生的反电动势对输出力的影响,另一方面是惯性质量产生的影响。因此在对排气门动态加载的过程中,存在着由排气门运动产生的多余力的干扰。多余力干扰负载电机的负载力加载过程,不仅严重地影响加载精度,而且对其他控制性能也有不利的影响,比如是稳定性变坏,频宽变窄等,因此,如何降低多余力对电动直线负载模拟系统的影响是改善系统性能、提高技术指标的关键。
目前降低多余力影响主要从两方面着手,一方面,在结构上,尽量减少运动部件的质量,以降低惯性力的影响;另一方面,从控制策略部分入手,通过控制算法对多余力进行补偿,以降低多余力的影响。而结构方面,课题组对电磁直线电机经过几轮的优化,针对目前电磁驱动配气机构的要求,已经尽量减小了运动部件的质量,因此需要从控制方面降低多余力对系统控制的干扰。
2.2 控制策略设计
为了使电动直线负载模拟器产生的负载力准确模拟排气门开始时气门受到的气体压力,需要对电动负载模拟器的控制策略展开研究。考虑到PID控制被广泛应用于各种工业控制中,具有结构简单,可靠性强以及易于实现等优点[11],提出一种基于复合前馈PID控制算法。考虑到电动负载模拟器属于被动式力加载系统,系统产生的多余力直接作用在控制系统上,对系统影响比较大,可以通过一些途径来预测多余力,依靠控制策略进行补偿。其中利用结构不变性原理消除多余力的方案具有成本较低、结构简单且易于调节等优点,因此本文采用以结构不变性原理为基础设计的前馈控制消除多余力,并且采用双闭环PID控制器(由负载力PID控制器和电流PI控制器串联而成的)作为反馈控制,使得电动直线负载模拟器能快速、准确地跟踪目标力。复合前馈双闭环PID控制系统原理图如图4所示。

图4 复合前馈PID控制系统原理图
前馈控制器的设计主要采用结构不变性原理,即利用被加载对象的速度进行前馈控制来达到消除多余力的目的。其示意图如图5所示。

图5 结构不变性原理示意图
理论上,系统干扰v(s)的前馈补偿环节G3只需要满足等式G2=G3G1就可以消除排气门运行速度干扰对于系统输出的影响,其中G3一般取固定常数。但是在电动直线负载模拟系统中,多余力的影响来自两个通道,且速度信号由位移传感器所测的位移值微分得到,因此存在相位滞后,传感器所测值存在偏差等问题,使得采用G3为固定常数的前馈控制消除多余力的效果不明显,实际应用中需要对速度信号进行校正,才能达到消除多余力的目的。因此,基于结构不变性原理的前馈补偿环节实际上不是一个固定常数,而是与动子的速度、加速度、传感器环节和一些非线性因素有关的一个较为复杂的高阶传递函数。在电动直线负载模拟系统中设计的前馈补偿环节如图6所示。其中,GPWM用来表示脉冲宽度调制(pulse width modulation,PWM)功率放大器的数学模型,表达式为

图6 加入前馈补偿环节的控制系统框图
(6)
式(6)中:UPWM为放大倍数;TPWM为功率放大器的开关频率,为防止电机在过程中产生噪声,要求开关频率必须高于系统回路中的一切谐振频率。
在设计前馈补偿环节Gc(s)时,分为Gc1(s)和Gc2(s)两部分进行,前者用来补偿反电动势带来的多余力,后者用来补偿克服动子运动时惯性引起的多余力。根据图6可知,Gc(s)、Gc1(s)和Gc2(s)应满足条件为
Gc(s)=Gc1(s)+Gc2(s)
(7)
(8)
(9)
由于功率放大其的开关频率比较小,因此在进行前馈设计时,可以忽略此项。综上,基于复合前馈PID控制方法的电动直线负载模拟系统的负载力加载控制策略设计完成。
3 仿真分析
为了验证复合前馈PID控制对多余力有较好的抑制作用,通过MATLAB/Simulink建立仿真模型,PID控制参数[11]取值如为:外环PID控制器(比例系数kp=2.5;积分系数ki=2 500;微分系数kd=0.000 08)以及内环PI控制器(kp=2;ki=0.1)。
分别在系统给定的负载力为恒定力(100 N)以及正弦力[Fd=50+50sin(100t-π/2)]的情况下,在负载力加载稳定后,动子按照图7所示的轨迹运行,负载力的加载情况如图8所示。
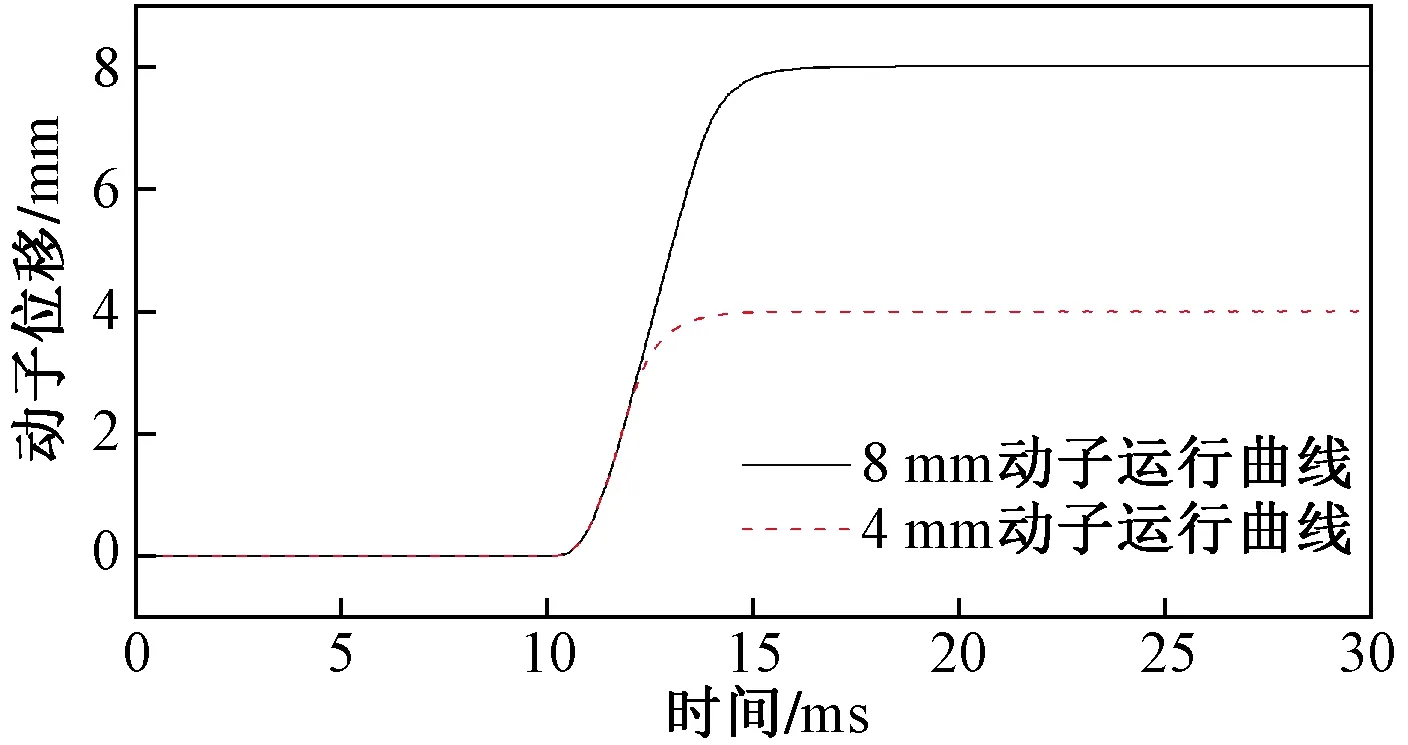
图7 动子运行轨迹图

图8 消除多余力仿真结果
由图8可以看出,在动子保持静止不动时,负载力可以快速、准确地跟踪到目标力,并且不存在明显的超调。在负载力加载10 ms之后,动子按照图7的运动轨迹运行,从图8(a)可以看到,未加入前馈的情况下,进行恒定力加载时,在动子目标位置为4 mm时,负载力的波动为±10 N,而在目标位置为8 mm时,负载力的波动为±20 N;在进行正弦力跟踪时,未加前馈的情况下,目标位置为8 mm时比目标位置为4 mm时的跟踪误差要大。由此可见,动子运动时设定的目标位置越大,动子的运动速度越快,产生的惯性越大,因此多余力对系统的影响越大。而在加入前馈补偿环节的情况下,恒定力加载的情况下,在目标位置为4 mm时,负载力的波动为±2 N,而在目标位置为8 mm时,负载力的波动为±3 N;图8(b)的正弦力加载情况下,跟踪误差也比未加前馈的情况要小。综上所述,与未加入前馈补偿相比,在动子运动的情况下,负载力的波动大大降低。前馈补偿环节可以有效地抑制多余力对控制系统的影响,并且有效提高控制系统的稳定性。
4 排气压力模拟试验研究
4.1 排气压力变化规律
电磁驱动配气机构在运行过程中,进气门开启时所受到的气体压力影响比较小,基本可以忽略不计,但是排气门开启过程中,会受到缸内外压力差的影响,并且不同运行工况下,排气门开启过程中受到的气体压力也会有显著的变化,是排气门在运行过程中受到的最主要的非线性扰动。为了验证提出的控制算法的可行性,实现对排气门的精确控制,在此考虑对排气压力进行建模,以便于在设计控制算法时能够准确考虑这部分干扰,并进行补偿,以降低排气压力对控制系统的影响。
排气门在开启过程中所受到的气体压力通常与气门位置、开启时刻气门受到的初始压力、气门有效流通截面积以及时间有关。一般情况下,表示为
Fg=cgfp(x,p0,t)Av
(10)
式(10)中:x为气门升程;p0为排气门开启时刻受到的初始压力;Av为气门有效流通截面积;cgf为气体压力常数,代表气体的流动迟滞作用,选择cgf=0.8的常值对气体的流动迟滞作用进行模拟。
课题组对试验中所选择的原型机的排气压力模拟进行了仿真研究,并且通过与原型机的试验数据对比,验证了仿真模型的可行性[12]。并且,在上述研究的基础上,求解不同初始压力之下的气体压力变化规律,根据计算结果,得到气体压力Fg的拟合公式为
Fg=cgf(p0-pb)Ave-600x1
(11)
尽管不同工况下,排气门开启压力不尽相同,但排气门开启压力一般在0.1~0.5 MPa的区间内,其对应的排气初始压力值如表2所示。

表2 不同初始压力对应的负载力值
4.2 试验装置
为了验证排气压力模拟的可行性,搭建了如图9所示的电动直线负载模拟平台。该试验平台采用电磁直线执行器为核心构件,具有结构简单紧凑、硬件配置方便、成本低等优势。且通过对负载力的闭环控制,可以达到较高的动态响应速度和跟踪精度,可以广泛应用于不同场合的负载特性要求。

图9 实验装置系统图
该平台以数字信号处理器(digital signal processor,DSP)(TMS320F2812)作为系统的核心处理器,设计了两路集成的驱动电路分别控制电磁驱动排气门和电动直线负载模拟器;位移传感器安装在电磁驱动排气门上,用于检测动子运动位移;力传感器用于检测负载力的变化;同时利用以太网通信进行上位机与DSP之间的数据传递。在本试验中,给定驱动电压为30 V,DSP采样频率选择10 kHz,PWM频率为20 kHz。最后,采集实验数据并进行比较分析。
4.3 试验结果分析
为了实现排气压力的模拟,需要对电动直线负载模拟器进行控制,使电动直线模拟器输出的负载力能够按照设定的目标负载力进行准确跟踪。
针对不同排气初始压力下的排气压力模拟展开试验研究,通过第4.2节搭建的电动直线负载模拟平台,采用复合前馈PID控制算法对负载力进行控制,排气门设定的最大位移为8 mm,而由于直线电机存在最大承载力的限制,为了防止直线电机因为过载而损坏,因此试验时选择排气初始压力在0.1~0.4 MPa,模拟排气压力变化曲线的试验结果如图10所示。

图10 不同排气初始压力下排气压力模拟
由图10可以看出,在气门位移为8 mm位置时,实测的负载力会突然变大,这是由于气门运动到8 mm位置时,动子会与力传感器之间存在轻微撞击,导致8 mm位置实测的负载力存在波动。而在不同初始排气压力下,负载力能够较好地跟踪目标值,跟踪误差在排气压力变化允许范围内。由此可知,电动直线负载模拟器能够用于模拟排气压力的变化,为后续电磁驱动排气门的控制策略研究提供了试验基础。
5 结论
针对电磁驱动配气机构排气门开启过程中存在的气体压力这一问题展开研究,为了验证排气门控制策略的可行性,首先提出采用电动直线负载模拟器对排气压力模拟的方案,并搭建了电动直线负载模拟平台。研究结论如下。
(1)由于电动直线负载模拟器属于典型的被动式力加载系统,多余力对力加载的影响较大,因此提出了复合前馈PID的控制策略,通过建模仿真分析,证明了该控制策略能够准确地目标力跟踪,并且对系统产生的多余力有较强的抑制作用。
(2)建立了电动直线负载模拟平台,对电磁驱动排气门开启过程中受到的排气压力变化规律进行研究,得到了排气压力随排气初始压力和气门升程变化的数学关系式。
(3)针对不同排气初始压力下排气压力模拟展开试验研究,试验结果表明,不同排气初始压力下,负载力能够跟踪目标力,跟踪误差在可接受的范围之内,验证了该控制方案的可行性,为后续研究排气门控制策略奠定了试验基础。
