基于预填充策略的纹理合成修复
2022-04-02毕学慧
毕学慧
(阜阳师范大学 计算机与信息工程学院,安徽 阜阳 236037)
1 引言
数字图像修复即在数字图像中填补缺失的区域或破损的区域[1],目前该技术已经成为数字图像处理的一个重要研究领域。数字图像修复技术应用广泛,在文物修复[2]、目标物移除[3]、视频修复[4]、三维实物修复[5]、图像扩展[6,7]、语义修复[8]等方面均有很深入的应用。
传统的图像修复算法主要分为两类:一类是Bertalmio 等[9]提出的基于偏微分方程(partial differential equations,PDE)模型的图像修复方法,经典 的 模 型 有BSCB 模 型[9]、TV 模 型[10]、CDD 模型[11],这类方法模仿手工修复过程进行填补,从已知区域向未知区域扩散,着重强调结构信息的填充,但随着填充面积的增大,填充会因平滑产生模糊效应,因此常用来修复小面积区域或细长的区域。另一类是基于纹理合成[3,12,13,14]的图像修复技术,典型的模型有Criminisi 等提出的基于样例[12]的图像修复,Barnes 等提出的patchmatch 修复[14],这类方法兼顾纹理信息和结构信息,采用样本块修复,通过计算优先权确定修复的次序,然后搜索最佳样本块填充图像,每次只修复一个样本块,适合于修复大面积区域。由于Criminisi 算法思路清晰,过程简单,修复结果好,引起了众多研究者关注并对其进行改进,在优先权函数[15]、样本块匹配[16]、自适应样本块大小[17]等方面提出了很多改进措施。
近年来,随着大数据和人工智能的发展,图像越来越容易获取,这为基于深度神经网络的图像修复提供了数据基础。例如基于上下文编码器[18](Context Encoders,CE)的图像修复、采用对抗网络的图像修复[19]、多级网络修复[20,21]等。这种利用大数据学习的策略,很大程度上解决了样本资源不足带来的诸多问题,吸引了众多学者的深入研究。虽然基于深度学习的图像修复技术具有传统算法无法比拟的优点,但其需要大量的数据样本进行训练,这也是该技术的缺点之一。
纹理合成技术在修复图像的过程中采用块填充,由于破损区域内的信息是未知的,所以在计算其纹理信息时,容易造成计算错误。为解决此问题,考虑提前填充部分区域,在一定程度上改进图像优先权的计算,进而改变图像的修复次序,最终改善图像的修复结果。本文在Criminisi 算法的基础上,实施预填充策略,并在优先权计算和候选样本块筛选阶段进行了改进,使得修复的精度更高。实验结果表明,本文提出的方法具有很好的修复效果。
2 Criminisi 算法
Criminisi 算法的思路是先寻找破损区域的边界,然后在边界线上找具有最高优先权的填充块,利用填充块中的已知信息,搜索最相似的样本块,利用相似块中的信息填补未知的区域,更新填充边界,重复以上过程,直到所有的破损区域填充完毕。图1 给出了填充的图例。

图1 Criminisi 算法修复过程示意图
下面详细地介绍其修复过程:
Step1.寻找破损区域的边界线。假设待修复图像为I,Mask为图像的掩模图像,其中破损区域用Ω 表示,∂Ω 为待修复区域的边界,样本区域为Φ(Φ=I-Ω).
Step2.设定填充块的大小为W×W,以填充边界上的点为中心,取W×W大小的图像块,计算置信度项和数据项,进而计算优先权。置信度计算公式为:
其中,| Ψp|表示图像块Ψp内像素的个数,C0(q)是置信度的初始值,定义如下:

从式(2)可以看出,位于样本区域的像素,其置信度为1;在破损区域内的像素,其置信度为0。通过置信度项的计算可知,填充块中的已知信息越多,得到的相似块越可靠。
人对图像中的结构信息比较敏感,应优先修复结构信息。而结构信息通常用梯度信息获取。计算数据项是为了优先修复结构区域部分。数据项的公式定义为:
其中,∇I表示图像的梯度值,表示位于点p的梯度垂直方向,⊥表示垂直方向。如图1(b)所示。np是点p处垂直于边界的法线,通过式(3)可知,和np的夹角越小越好。α是归一化因子,当图像为灰度图像时,α=255。
利用置信度和数据项的乘积计算优先权,主要控制填充边界上填充块的修复次序,一方面考虑了置信度因素,包含已知信息越多的填充块,赋予优先修复;另一方面考虑了数据项因素,对结构部分优先修复。优先权的计算公式为:

Step3.比较上一步求得的优先权值,得到具有最高优先权的填充块,假设为 |Ψp|,再在图像的样本区域中寻找相似块,采用欧式距离即SSD(sum of squared difference)作为相似度计算公式,计算公式为:

其中c表示颜色通道,当图像为彩色图像时,c=3;当图像为灰度图像时,c=1。和为两个图像块对应位置上的颜色值。
通过计算距离的最小值,获得最相似的样本块,如式(6)所示。

图1(c)给出了寻找最相似样本块的示意图。
Step4.寻找到最佳样本块后,利用相似样本块填补图像的缺失区域,如图1(d)所示。更新填充边界。
Step5.如果修复没有完成,继续执行Step2-Step4,直到所有的破损区域修复完成。
3 本文方法
从图1(c)可以看出,在计算梯度的过程中,p点周围存在破损和非破损的区域,利用非破损区域的信息计算梯度的值较合理,但这些信息容易对梯度的计算造成干扰。如果填充边界向外扩展,此时计算中心点p 的梯度比较合理,但是每次填充区域较少,修复比较耗时,当图像尺度较大时,耗时更长。在修复填充区域前预填充一些信息,这样计算的梯度值更合理。
在利用颜色距离获取最佳样本块时,得到的样本块并非一定是最合适的样本块,可能导致修复失败。因此,在选择样本块时进行二次挑选,进一步缩小误差。在Criminisi 算法的基础上,本文在填充和样本筛选阶段均进行了改进。
3.1 预填充策略
在利用Criminisi 算法修复图像的过程中,发现有很多点的优先权和最高优先权的值非常接近,因此先考虑这些与最高优先权值相近的填充块,对其预填充,为下次图像填充做准备。图2 给出了一幅填充图像,红色的正方形是填充区域。在填充边界上,计算优先权的值,得到如图3a 所示的柱形图。从中可以看出,有一些点的值与最高优先权的值较为接近,这些点所在的填充块在后期会优先处理。
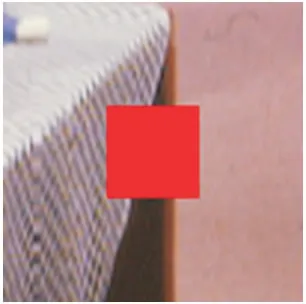
图2 优先权的计算
通过公式(4)可知,数据项和置信度会影响优先权的计算,置信度的波动范围较小,而数据项的波动范围较大,因此修改优先权的计算,进一步改善因数据项值较小影响优先权值的问题。
改进后的优先权计算公式为:

图3(b)给出了改进后的优先权值。根据式(7),可以看出优先权值的变化不会出现太大的波动。

图3 优先权值的计算
优先权决定填充次序,对填充边界上的点按优先权值从大到小排序,对排名前m 个的填充块进行填充,其中第1 个填充块是优先权值最大的填充块,直接进行填充,而其他m-1 个填充块是预填充。这些预填充的图像块,因为其优先权值较高,后续的填充促使其会尽快得到修补。为能够提高算法的修复效率,本文设定m=5。
预填充策略的算法如下:
输入:待修复图像I,掩模图像Mask。
Step1.利用掩模图像获取图像的破损区域,得到填充边界。利用公式(2)初始化置信度项C0。
Step2.利用公式(1)计算填充边界上每个填充块的置信度。
Step3.利用公式(3)计算填充边界上每个填充块的数据项。
Step4.利用公式(7)计算填充边界上每个填充块的优先权。
Step5.对优先权进行降序排序,取出前5 个待填充块。
Step6.对第1 个填充块(具有最大优先权值的块)进行填充,第2—第5 个填充块进行预填充。
Step7.更新第1 个填充块修复后的边界。
输出:填充第1 个修补块和预填充块图像,以及更新后的掩模图像Mask′。
3.2 相似样本块的度量
为了能够找到更加相似的样本块,采用Lab颜色空间,同时考虑梯度间的差异,对SSD 距离进行修改,得到距离公式的定义为:

其中,∇Lx和∇Ly表示在L 通道水平方向和垂直方向上的梯度值。考虑到颜色一致性,所以在Lab 空间上进行距离度量。加入梯度距离,不仅考虑颜色的整体差异,还考虑梯度分布的差异。
3.3 多候选块筛选策略
利用颜色相似性,在用公式(5)寻找相似样本块时,发现距离最小的样本块,并不一定是最佳的相似块,若选错样本块则会导致图像修复不合理,因此有必要挑选出最优相似块。
为能够找到最优相似块,在计算最相似样本块的过程中,保存每个候选块的颜色距离,利用距离值对样本块相似性进行排序。Criminisi 算法选用最小距离的样本块,我们对其进行了优化,取前10 个相似的样本块进行筛选。两个图像块的协方差矩阵可以表达两个图像块之间的结构相似性。利用协方差矩阵之间的距离计算两个图像块之间的距离,则Ψp和Ψq之间的距离可以表示为:

其中,μΨp和μΨq分别是图像块Ψp和Ψq中像素值的均值,CΨp和CΨq分别是图像块Ψp和Ψq的协方差矩阵。
再利用公式(9)筛选样本块,定义如下:

多候选块筛选策略如下:
输入:候选样本块的位置、SSD 距离值和待修复块。
Step1.利用SSD 距离对候选样本块从小到大进行排序。
Step2.挑选出前10 个距离最小的候选块。
Step3.利用公式(9)计算这10 个候选块与具有最高优先权的填充块间的S 距离。
Step4.利用公式(10)找出S 距离最小的候选块。
输出:S 距离最小的候选块。
4 实验结果与分析
4.1 参数设置
于WIN10 平台运行,Matlab2019Rb 语言编程环境下进行实验。公式(8)中的λ=0.8。修复采用的块大小为9×9。
4.2 实验结果与分析
图4 是一幅具有结构的图像,其中图(a)—(h)分别是原图、标记图、本文方法结果、Criminisi方法[12]结果、Barnes 方法[14]结果、Newson 方法[22]结果、Jurio 方法[23]结果、Anupam 方法[24]结果。通过观察可以发现,Criminisi 方法、Jurio 方法、Anupam 方法的修复结果较差。本文方法、Barnes 方法、Newson 方法的修复结果较为令人满意。表1给出了PSNR 指标值,数据表明了本文方法的修复结果较好。
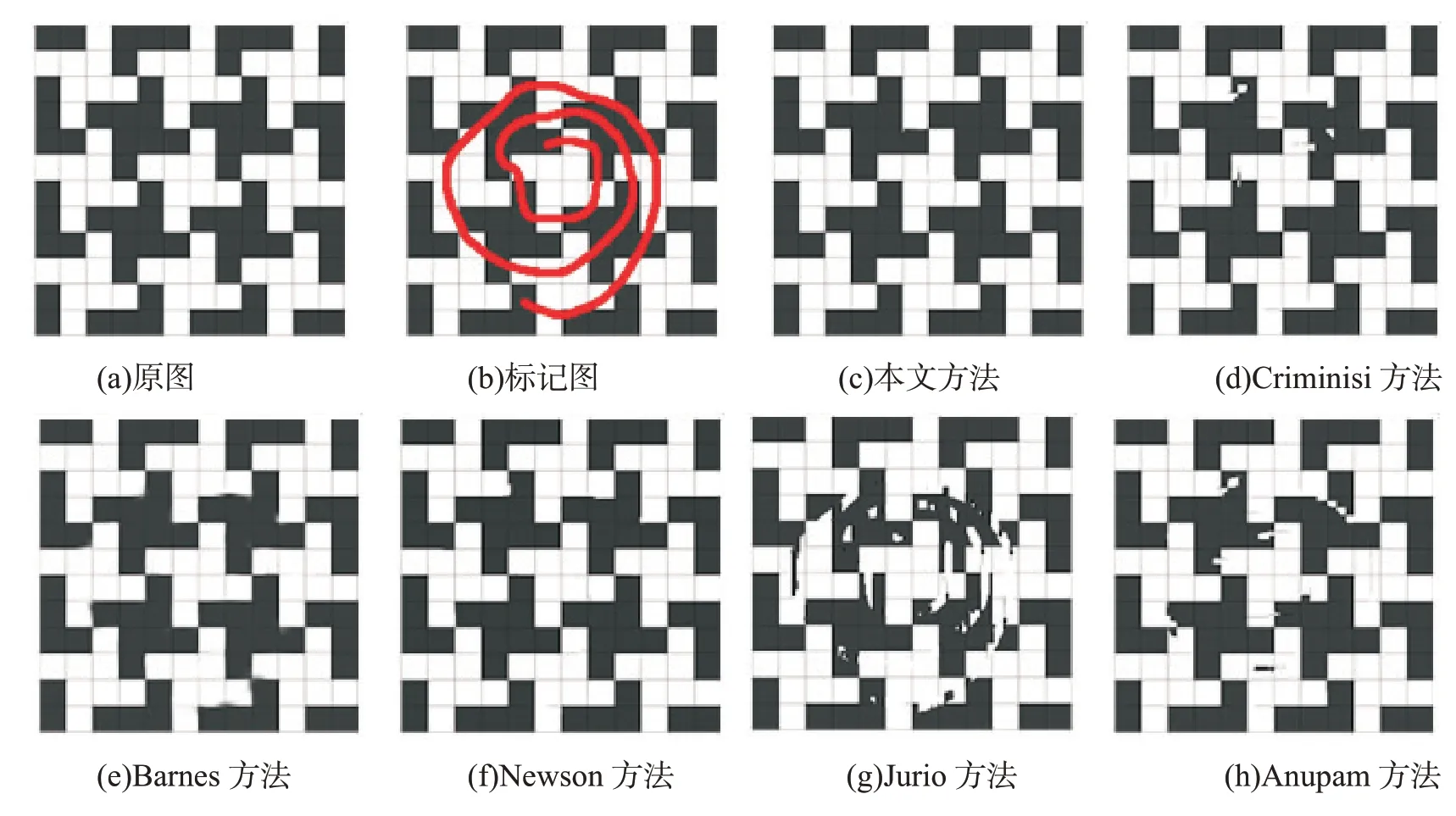
图4 格子图像修复
图5 是金字塔图像,其中图(a)是原图,图(b)是标记图、图(c)—(h)分别是利用本文方法、Criminisi 方法、Barnes 方法、Darabi 方法[25]、Newson方法、Deng 方法[26]修复图像的结果。从图5 可以看出,Criminisi 方法和Deng 方法的修复结果较差。从表1 中PSNR 值可知,本文方法的PSNR值最高,表明本文的修复方法优于Barnes 方法、Darabi 方法和Newson 方法。
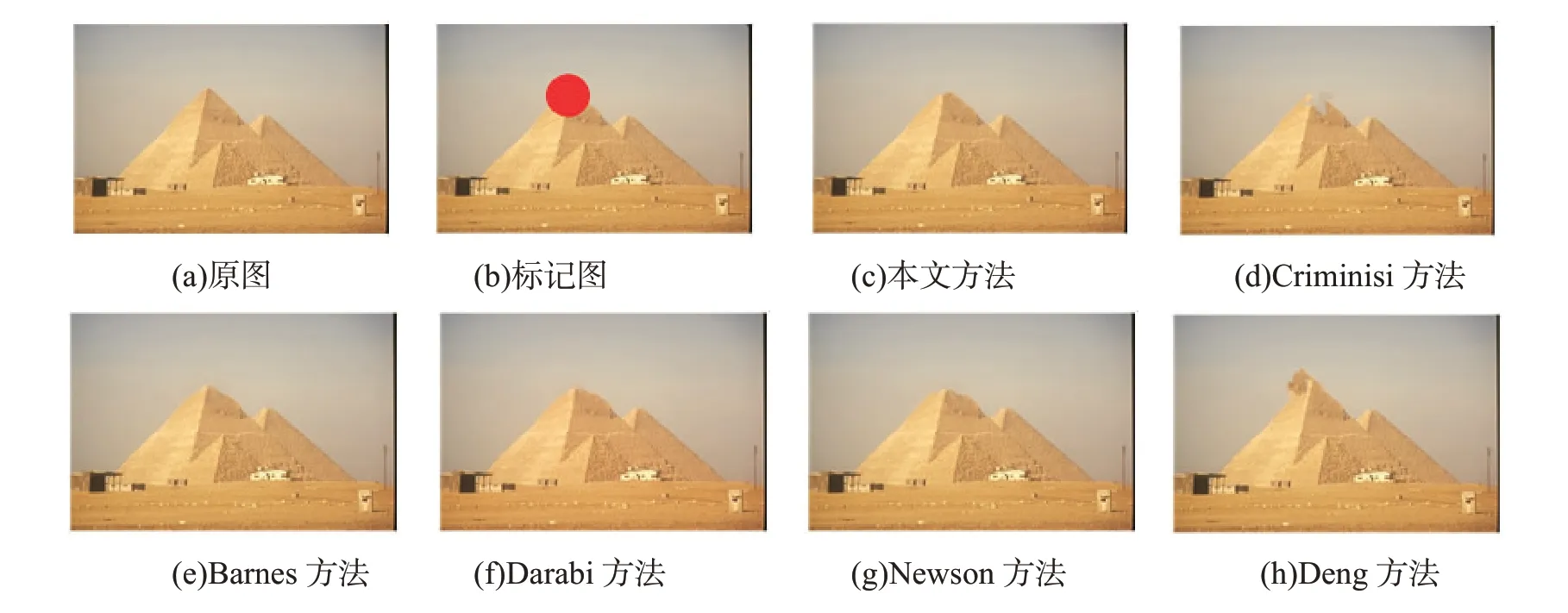
图5 金字塔图像修复
图6 是一幅栅栏图像,其中图(a)是原图,图(b)是标记图、图(c)—(h)分别是利用本文方法、Criminisi 方法、Barnes 方法、Darabi 方法[25]、Newson 方法、Deng 方法[26]修复图像的结果。从图6 可以看出,Criminisi 方法、Barnes 方法和Newson 方法的修复结果出现了模糊和瑕疵。通过表1 给出的PSNR 值可以看出,本文方法的修复结果优于其他方法。
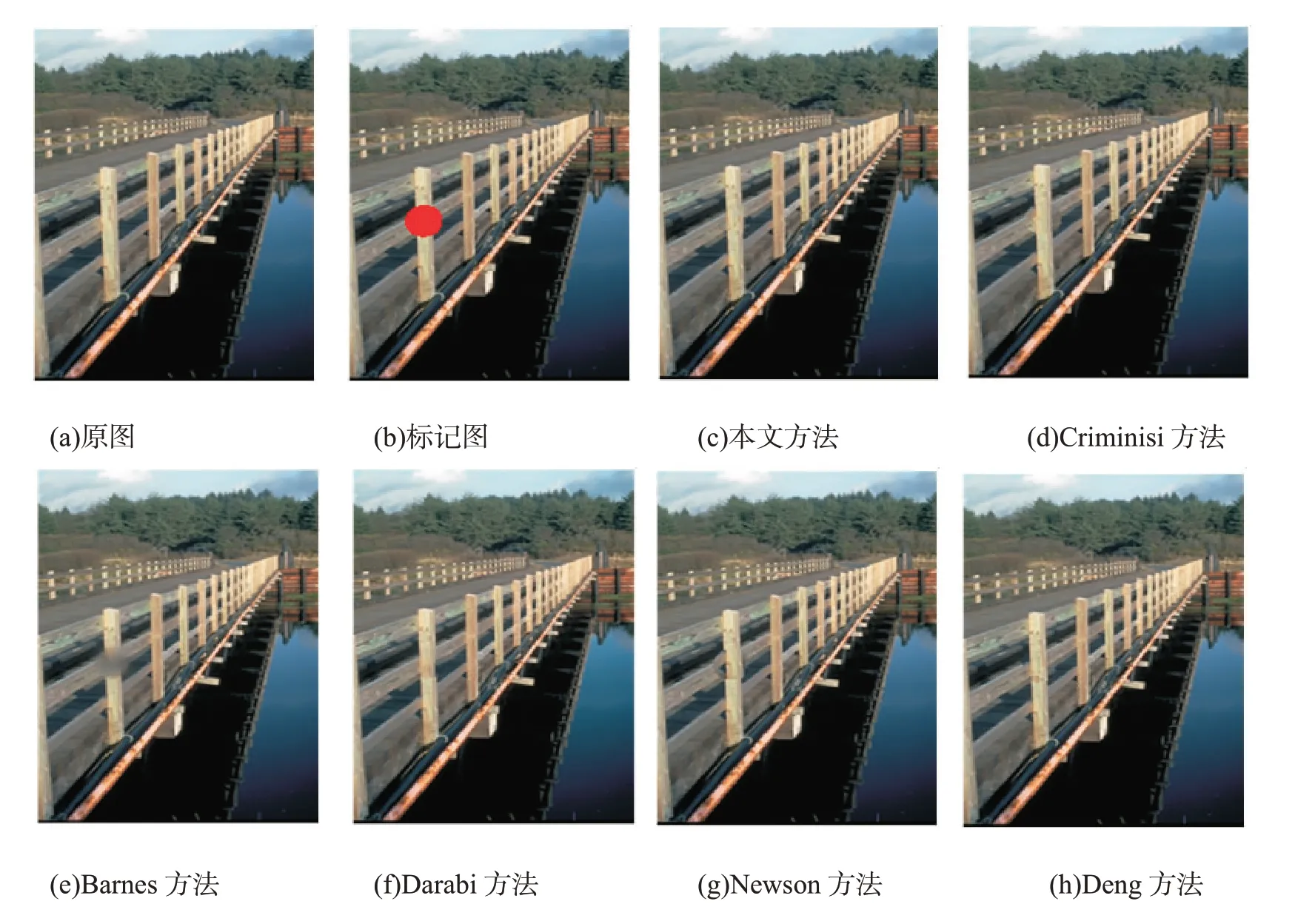
图6 栅栏图像修复

表1 各种方法修复结果的PSNR 对比
除了利用PSNR 评价修复结果外,还采用了SSIM 指标进行评价。SSIM 指标是评价结构一致性的度量指标,其值越大说明修复结果和原图在结构上越相似。通过表2 可以看出,在修复金字塔图像时,Newson 方法的SSIM 指标值最大,修复效果优于本文方法。但本文方法在修复其他2幅图像时,SSIM 指标值均最高。这说明本文方法在整体上修复能力较强。

表2 各种方法修复结果的SSIM 对比
将本文提出的方法与Criminisi 方法、Barnes方法、Newson 方法和Jurio 方法的修复所耗费的时间相比,本文提出的方法比Criminisi 方法需要更多的时间。这是因为本文方法在修复过程中进行了预填充和多个候选块的筛选,所以需要花费较多的时间。但是,本文方法与Newson 方法相比,所需要的时间更少。通过对比分析可知,为了更好地修复图像,在处理过程中,本文方法加入了更多处理环节,虽然耗费了一些时间,但较好地提升了图像的修复质量。
5 结语
利用Criminisi 算法计算出的优先权容易受梯度影响,进而影响图像修复次序和修复结果。为解决此问题,本文提出了基于预填充策略纹理合成技术,对优先权的计算进行了改进,使优先权的计算更合理。在每次填充的过程中,除了修复最高优先权的填充块外,还对其他次级优先权的样本块进行了预填充,进一步保证了优先权的计算更加准确。考虑到距离最近的样本块可能并非最合理的修复块,因此利用协方差矩阵进行筛选,从而得到最相似样本块。通过理论分析和实验验证,表明了本文方法具有较好的修复效果。然而,对于旋转等复杂情况,还需要进一步研究,以提高图像的修复质量。