基于空间特征的SAR图像电塔识别研究
2022-04-02王菁晗尹欣欣张皓然
王菁晗, 翟 玮, 尹欣欣, 张 璇, 张皓然
(1. 中国地震局兰州地震研究所, 甘肃 兰州 730000; 2. 中国地震局黄土地震工程重点实验室, 甘肃 兰州 730000;3. 中国地震局兰州岩土工程与地震研究所, 甘肃 兰州 730000; 4. 甘肃省地震局, 甘肃 兰州 730000)
0 引言
中国的西北部是风力资源最为丰富的地区之一,风力发电机是中国西北部能源供应的重要支柱。根据统计,该地区风能资源占其陆地风能资源总量的1/3[1]。地震导致的风力发电机大面积损毁会对国民经济及灾区的供电和电网的稳定造成巨大的影响,因此快速且精确地对其进行识别,迅速获取受灾地区有效信息非常重要[2-8]。Synthetic Aperture Radar(SAR)图像具有全天时全天候工作等特点[9],在自然灾害研究中得到广泛的应用,是不可或缺的重要技术手段[10]。如何运用震前SAR来快速提取电塔构筑物具有重要的减灾应用价值[11],此外,由于我国西北部地区地广人稀,电力输送皆依靠于处于无人区的电塔等设施,自然灾害发生后电塔的倒塌难以及时查看,而依靠传统的人力等方式去获取倒塌电塔的位置严重影响受灾区域的电力供应,因此如何快速获取倒塌电塔所在的位置就显得极为重要。
在SAR影像处理与分析中,充分利用空间上下文信息,可以有助于抑制斑点噪声,提高变化检测的精度[12-13]。在图像的分割过程中,通过概率竞争网络,利用图像像素间的空间关系能够提高分割、检测的准确性[14]。Fan等[15]利用空间关系来细化光学和SAR图像的初始匹配特征来对两幅数据进行匹配,也获得了不错的效果。而在目标识别方面,Dellepiane等[16]利用经典特征作为样本均值和样本方差,通过图像的空间相关性提出了参数特征估计方法来对图像进行分类。Liu等[17]通过对油气渗漏异常区与盐碱化异常区的叠置聚焦分析,发现了二者之间的空间位置关系,并借此提高了油气渗漏信息的识别准确性。而在人工目标检测方面,传统的恒虚警率(CFAR)算法计算简单,性能稳定,在目标检测中最为常用。但其也有着处理窗口的非自适应以及检测目标种类、大小和结构的多样性等缺点。许多学者也因此提出了许多解决办法,Li等[18]提出了一种改进的CFAR算法,同时具有自适应阈值和自适应处理窗口。Jung等[19]、Sagliano等[20]及Song等[21]提出的双步快速CFAR算法,减少了目标形状的畸变。但以上算法需要对整幅影像进行遍历,在遍历较大或者大幅SAR图像时需要消耗大量运算资源,且花费时间也较为漫长,因此很难做到实时的检测,也不利于自然灾害发生后的快速获取灾情信息。
本文研究区中,电塔的分布形式有序且规律,使得空间信息在这一类的地物识别中有较大优势。为了减弱具有相似散射强度的建筑物和地形高亮点等的影响,能够对地表上分布有序的电塔进行快速且高效的识别与提取,我们引入了空间关系的相关理论及技术,提出了一种基于空间特征的推理方法。该方法利用快速双参数恒虚警算法(FTP-CFAR),对稀疏且有序分布的电塔构筑物进行提取与识别,获得电塔的空间信息,并对该信息进行筛选与判别。然后根据筛选出来的空间信息进行电塔分布的空间特征提取,获取了电塔分布的空间特征量,通过该特征量对电塔进行多种条件约束下的空间推理方法来获取没有被识别出来地物,以及删除识别错误的地物。另外,为了验证该方法的准确度和偏移量,我们除了使用常规的精度评价方法对本文方法与传统方法的结果进行对比以外,还提出了一种评价推理结果精确度的评价指数——误距风险,来评价本文方法推理出的电塔目标的偏移量,并获得了不错的结果。
1 研究方法
一般情况下,电塔这一类孤立的构筑物大多分布在人烟稀少的地区,且分布得较为零散而有序,其周围基本为草木、植被等背景地物,较为容易进行识别。但是本文中的研究区处于荒漠,地表上分布着干涸的河床以及裸露的岩体等地形高亮地物,在单极化SAR影像中其与构筑物的散射强度极为相似。且由于单极化SAR图像并没有和全极化SAR一样包含多种地物信息,同样灰度值所表示的像素并不能代表着同一种地物。因此急需要一种行之有效的方法来对这一类地物进行识别,具体方法如下。
1.1 空间推理方法
空间推理方法的前提是获取空间关系特征,而获取空间关系特征的前提则是确定空间关系的起始点。有了起始点,才能根据起始点来确定精确的空间关系,从而为后续的空间推理提供精确的依据。因此我们的空间推理方法步骤划分为三步:确立起始点、确立空间关系以及空间推理。
1.1.1 检索起始点的遍历窗口设计
首先需要目视确定SAR图像上地物分布的大致方向。通过对图像中目标像元的十六个方向进行检索,目标像元为图像中每个连通区域中灰度最大的像元。如果在某个方向上检测到了非零像元,且该方向与地物的分布方向大致接近,则反方向进行检索,反向相同检索距离下的像元如果为零值,则可判断该像元为检测的起始点。起始点遍历窗口示意如图1所示,其中,Sp1为非零点像元,Sp1+180°则是用于反向验证的像元。
1.1.2 确立空间关系
建立每一对的起始点与验证点之间的线性关系,通过空间关系获得了空间的三项特征量,分别是偏移量Toffset、角度Tangle以及目标间距Tdistance,这三项空间特征量决定着后续空间推理的约束。其具体公式如下:
(1)
式中:(x1,y1)为起始点的坐标,(x2,y2)为验证点的坐标。由于电塔的有序分布,Tdistance基本为固定的值。而Toffset与Tangle则根据起始点与验证点获得,进行多次实验来确定其大致的数值。如果某一偏移量与角度多次出现,则表示电塔的分布形式不止一种,我们便将其作为备选值,在后续的空间推理过程中将其带入。
在得到上述空间的三项特征量以及确立初步的空间关系后,依据得到的空间三项特征量进行后续目标点的识别与空间关系的验证。如果没有异常,则将该空间三项特征量作为后续空间推理的依据,否则终止后续点的识别。
1.1.3 空间关系的实现
为了丰富空间推理方法应对各种分布情况的能力,我们对空间推理方法进行了多种条件下的约束推理,分别为:两点间的推理、邻近约束推理、起始点的推理以及结束点的推理四种。
两点间的空缺推理是针对某一线性序列中,两目标物间的距离长度与Tdistance相差较远而设置的条件,该条件表示这两目标物之间应有一个或者多个目标存在。那么它的条件公式为:
ifp×Tdistance≤Edistance≤q×Tdistance,p∈Q
(2)
式中:p与q为大小两个整数阈值;Q代表缺失的目标集合;Edistance则表示的异常的间距大小。
邻近约束推理则是为了防止因为地形的影响导致目标地物在某一区域的分布数目异常而设置的条件推理。该条件推理以其相邻的序列为依据及约束。其主要原理是某一序列的分布数目取决于该列临近的序列,距离该序列越近的序列有着较高的影响权重,而邻近的序列权重越高则表示该列的数目与其数目更为接近。

(3)
式中:Pnum为数目异常的序列数目;Plnum与Prnum分别为Pnum的左右临近的序列数目,Plnum-1与Prnum+1分别为Plnum的左邻与Prnum右邻序列数目;w、u和v分别为差异的数目以及权重,通过多次实验获得合理的值。
起始点的推理以及结尾点的推理这两个条件约束其目的是为了补充在预处理过程中遗失的起始点与终止点。这两种条件推理是基于邻近约束推理所得到的序列数目作为条件进行推理的,然后通过统计分析并总结缺失序列的空间三参数来进行推理。其基本公式如下:
(4)
式中:Spx与Spy为所求的起始点或结尾点的位置坐标;Spx1与Spy1为起始点与结尾点异常序列的起始点与结尾点的坐标。
1.2 快速双参数CFAR算法
传统的双参数CFAR检测算法需要对整幅影像进行遍历,在遍历较大或者大幅SAR图像时需要消耗大量运算资源,且花费时间也较长,因此很难做到实时的检测,也不利于自然灾害发生后快速获取灾情信息。因此我们采用艾加秋等[22]及Ji等[23]提出的一种快速双参数CFAR算法,该算法通过两级全局滤波以及区域二值图的局部双参数CFAR算法来实现快速的图像目标检测。其流程图2所示。

图2 快速双参数CFAR算法流程图Fig.2 Flow chart of fast two-parameter CFAR algorithm
综上所述,本研究主要分为三个部分:(1)图像的预处理;(2)对预处理后的图像中的电塔建立空间关系模型;(3)在多条件约束和五个参数的组合下应用空间推理方法。单极化SAR图像中的非目标物体和目标物体的灰度特征非常相似,这可能导致错误的识别结果。鉴于上述问题,我们设计了一个完整的研究流程,如图3所示。
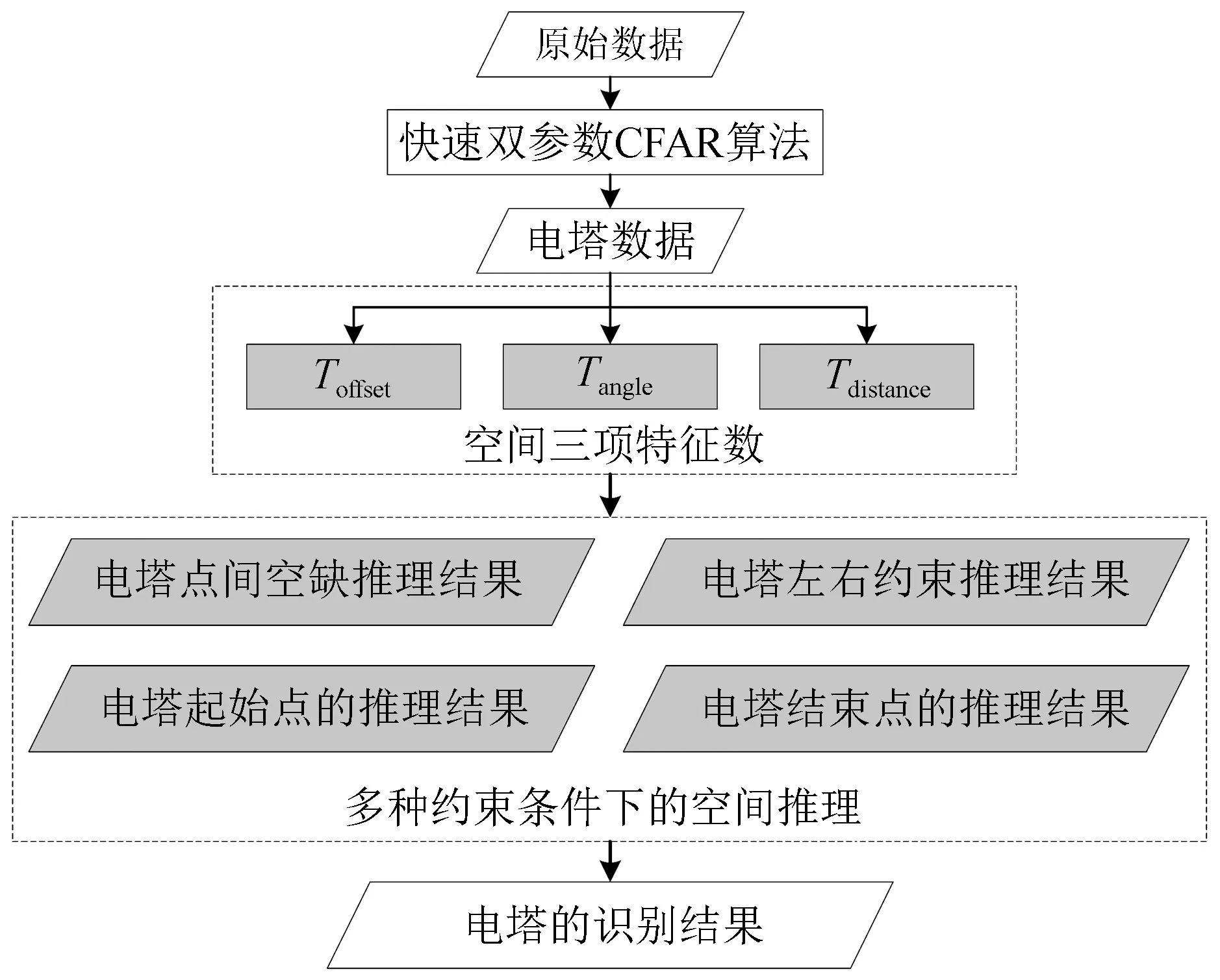
图3 基于空间特征量的空间推理方法流程图Fig.3 Flow chart of the spatial reasoning method based on spatial feature quantities
2 实验
2.1 实验数据及研究区域
本文的研究区域为甘肃省西北部的干旱区荒漠,使用的是ALOS-2卫星数据。卫星具体参数如表1所列。

表1 ALOS-2卫星参数
研究区域内分布了数以百计的风力发电机、数以千计的配套设施以及干涸的河床、裸露的岩体等地物。我们选取了约25 km2的区域来进行研究。研究区位置示意图如图4所示。

图4 研究区位置示意图Fig.4 Location of the study area
2.2 实验步骤
研究范围内虽然背景地物大部分为单一的荒漠,但是其中也分布着风力发电机、电塔和电厂等建筑物以及裸露的岩体、干涸的河流等地形高亮点地物,如果仅仅采取FTP-CFAR算法来处理,提取与识别的结果中必然会混有大量的非目标点,导致目标物识别精度较低,因此针对上述问题,如何将空间推理运用到有序分布的构筑物识别中去,并精确地将目标地物与地形高亮点区分开来,极大地提高目标识别的精度是本次实验的重点。
2.2.1 快速双参数CFAR处理
FTP-CFAR算法处理结果如图5所示。可以看到,从原数据到结果数据,建筑物的高亮区域被打散,而电塔则较为完整地被保留下来。此外,还有一些地形高亮点与电塔相互交叉的分布在一起,难以区分,所以我们对FTP-CFAR算法的窗口进行了限制,以便其将大块的地物除去。
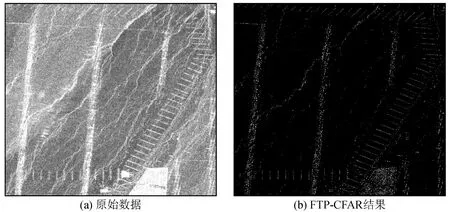
图5 快速双参数CFAR算法处理结果Fig.5 Processing results using the fast two-parameter CFAR algorithm
2.2.2 空间推理处理
(1) 起始点的确立
建立空间关系是要首先确立一个遍历的方向,我们从图像的中间向四周遍历,通过方法中起始点的遍历窗口确定遍历的起始点。起始点遍历结果如图6 (a)所示;FTP-CFAR算法的结果会导致有些电塔与地形高亮点相混淆,每一个序列会出现两个或者多个极度相近的点,如图6 (b)所示。这会严重干扰目标识别的精度以及后续的空间推理。
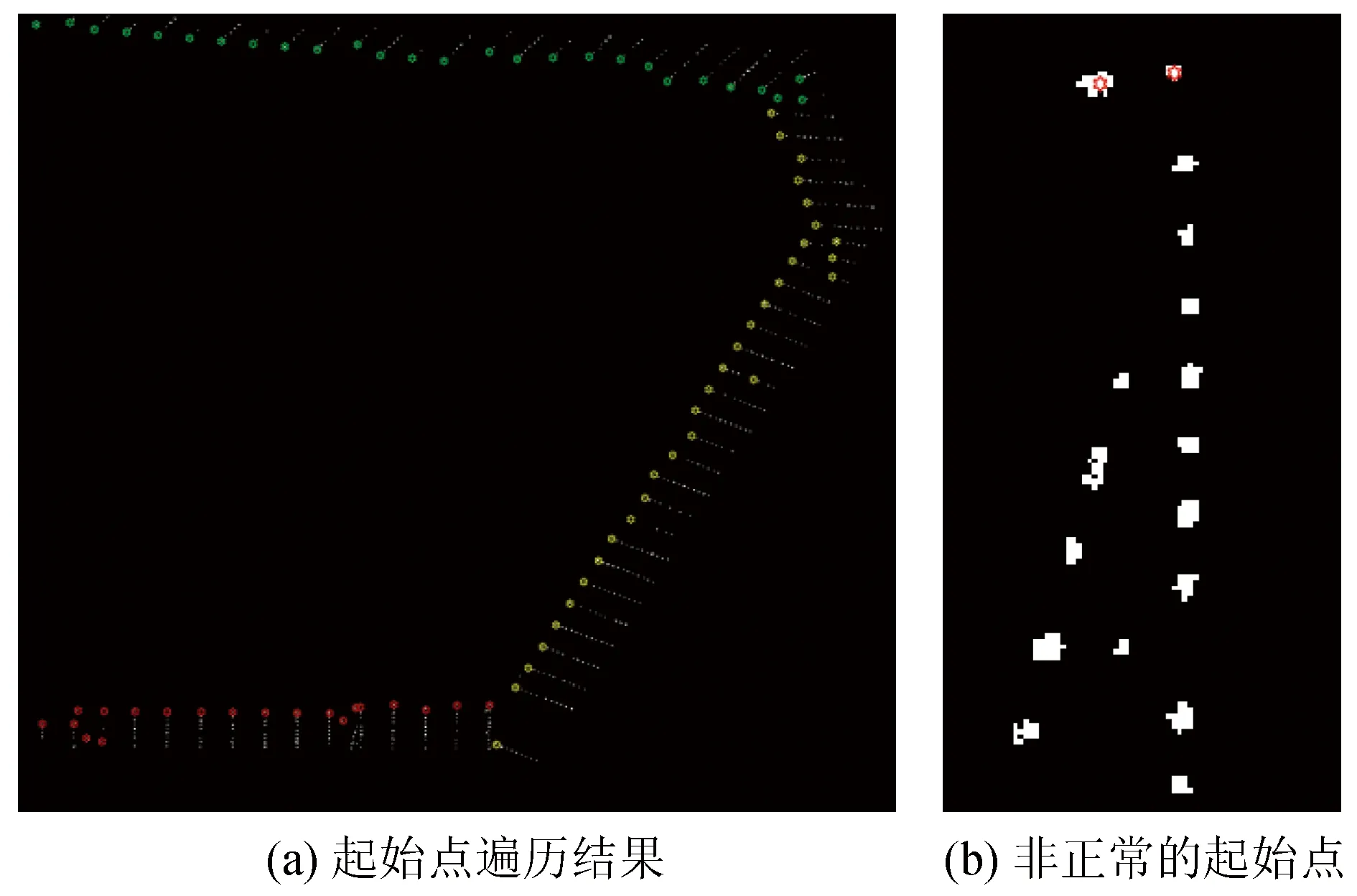
图6 起始点遍历结果Fig.6 Traversal results for starting points
(2) 空间关系的确立
二维空间中线性分布是最基本的分布形式,同时也是我们研究区内电塔的分布形式。其最基本的参数为斜率与偏移量。因此本研究中我们提出了角度Tangle、偏移量Toffset以及距离Tdistance三种空间特征量来进行电塔的识别。初始的识别结果如图7所示。

图7 第二点的遍历结果Fig.7 Traversal results for the second point
为了使结果更加易懂,我们将起始点设置为o形,第二个点设置为*形。经过实验计算,图像上方电塔的Tangle范围为45°到50°;图像右侧电塔的Tangle范围为-68°到-70°以及-75°到-80°;图像下方电塔的Tangle范围为0°到3°,电塔之间的距离Tdistance在18至20个像素之间。
根据上一步得到的线性识别结果,我们可以对剩余的线性分布的点进行后续的识别,三项空间特征量的约束足够对电塔的分布进行检索。电塔的最终检测得到的结果如图8(a)所示。可以看到,大部分线性分布良好的构筑物都被完好的检测了出来,但是还有一些异常点,由于三个特征量的不满足,导致检索停止,如图8(b)。
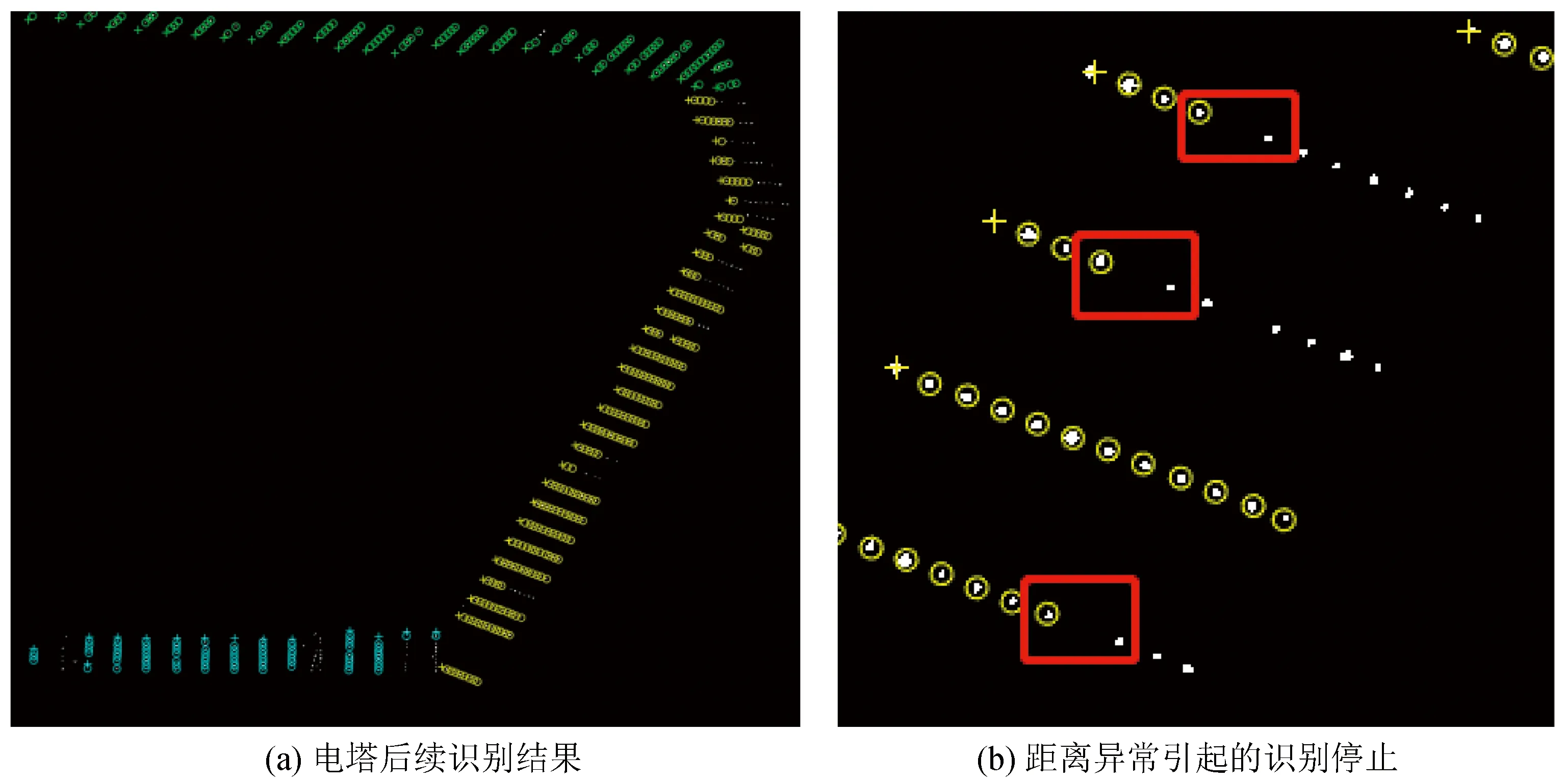
图8 电塔识别结果及异常Fig.8 Tower identification results and anomalies
有了上述的线性检测结果,便能在二维空间中建立每一条线性分布线性的方程,然后将剩余的点代入到每个方程中去验证,并设置阈值来限定误差。误差越小则表示该点越有几率属于该线性。我们便可以将该点接入到线性中去,从而完成整条线性的识别。实验中我们将误差规定在5个像素以内,得到的结果如图9 (a)图所示。我们可以看到,其检索结果基本准确。此外,由于受到误差的限制,如图9 (b)图所示,与目标构筑物相互混杂在一起的地形高亮点被剔除出去,没有被当作目标物而标识出来。
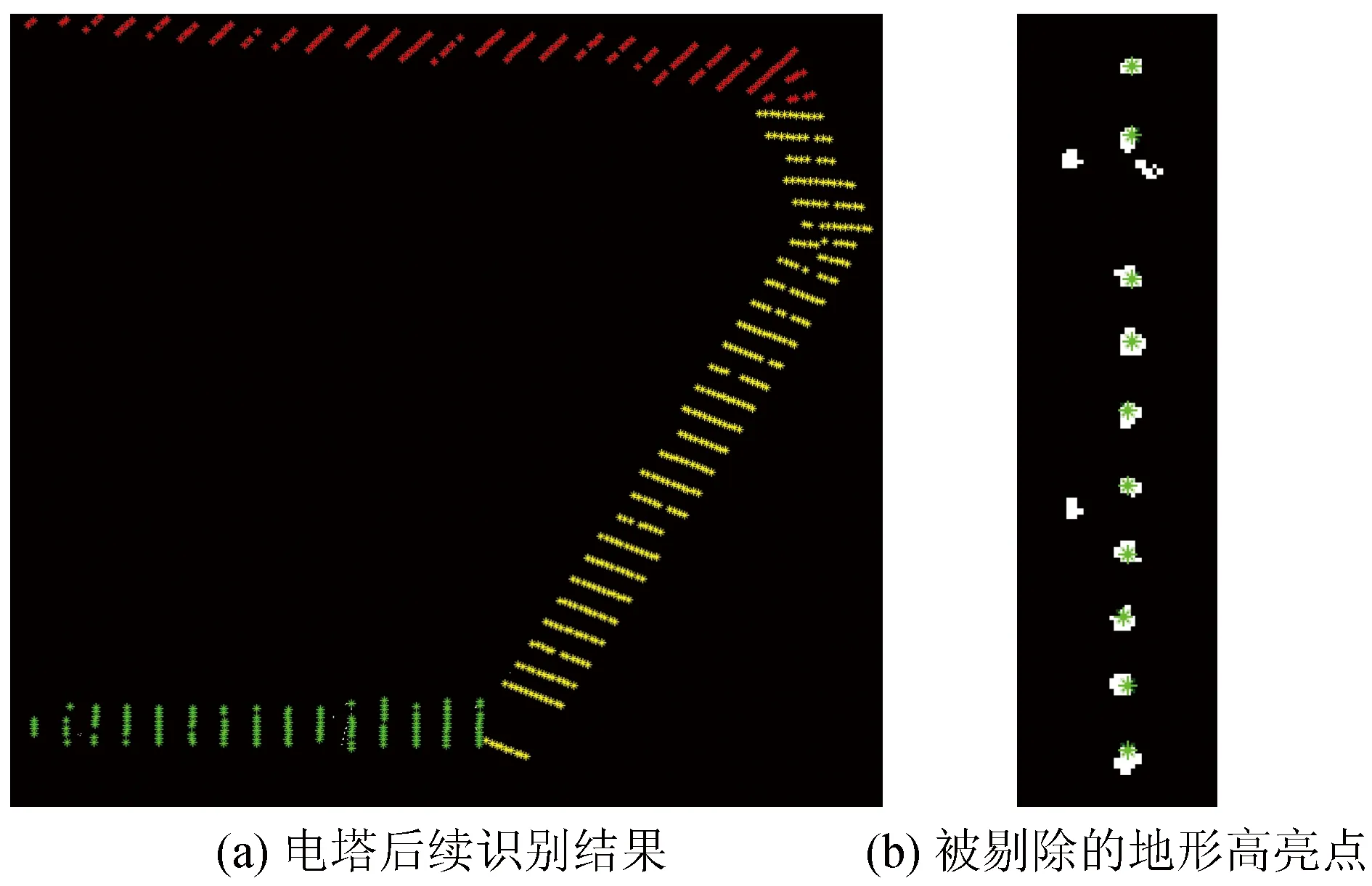
图9 电塔的后续检测结果Fig.9 Subsequent test results of electric tower
(3) 空间推理实现
经过上述步骤,我们已经获取了每一条线性分布目标物的二维空间线性,也获取到了每条线性的各项二维空间特征量。对那些没有被FTP-CFAR算法检测出来的目标物进行空间推理。由于后续的步骤在方法中我们已经进行了详细的阐述,因此,在该部分我们只将推理的结果展示出来,结果如图10所示。
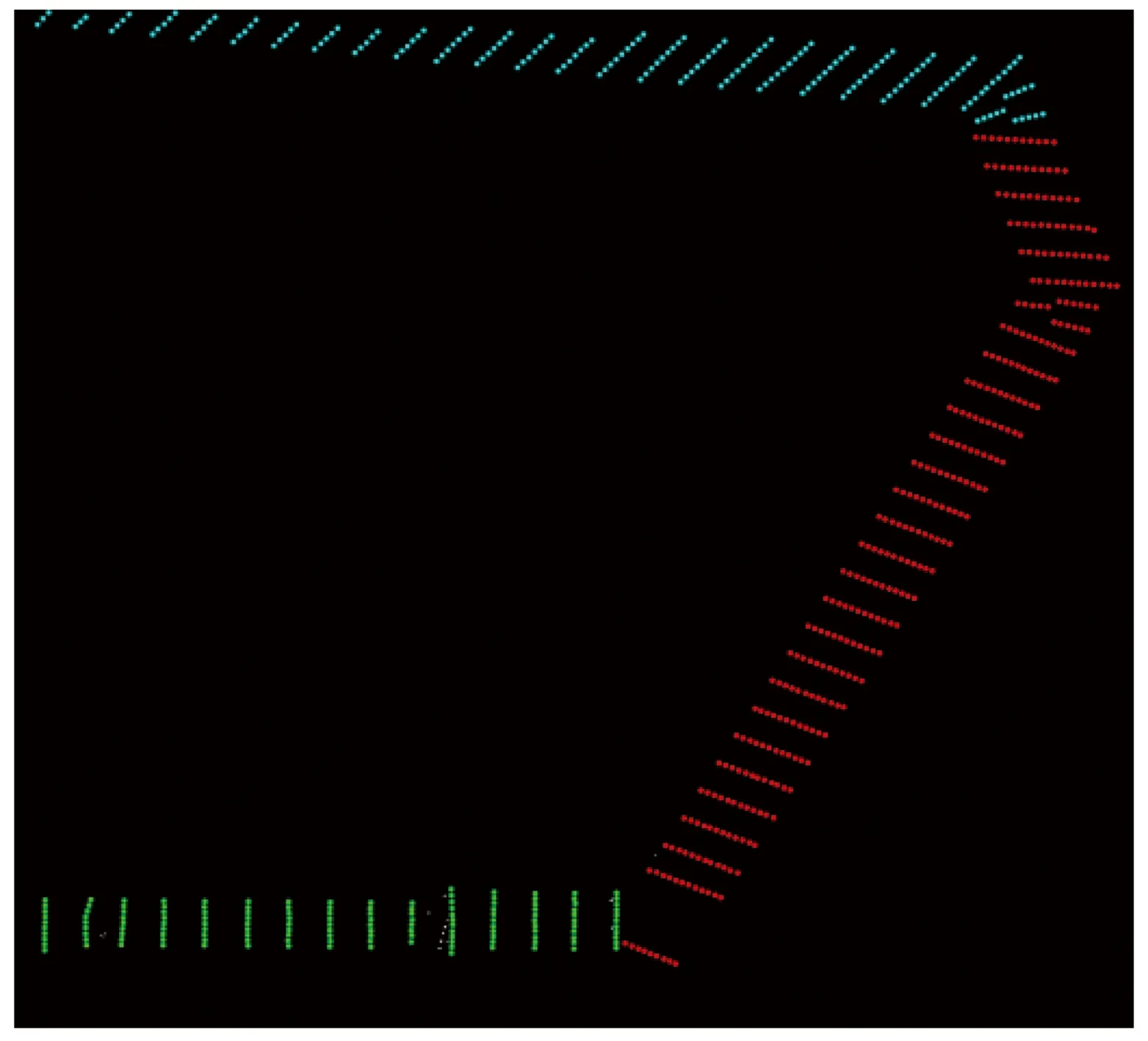
图10 电塔的推理结果Fig.10 Reasoning results of electric tower
2.3 实验分析
为了验证空间推理对于有序分布构筑物的推理精度,我们对空间推理的结果进行了两种精度估计,一种为推理结果与实际目标点的数目差距精度,我们称之为误分率;另一种为推理正确的结果点坐标与实际目标点坐标之间的距离差距,我们称之为误距风险。
2.3.1 误分率
在本研究中我们为空间推理方法所推理的数目结果精度提出了一种精度评价方法,其公式为:
(5)
式中:Ec为误分率,它为常规方法的正误分率与负误分率之和;Cp代表两种方法多识别出来的电塔的数目,它并不存在于原始的目标点之中;Cm代表两种方法没有被识别出来的电塔的数目,存在于原始的目标点之中。C为目标点的实际数目。其具体数目如表2所列。

表2 误分率对比
我们可以看到,电塔的空间推理方法结果的误分率是非常低的。
2.3.2 误距风险
我们提出误距风险这一评价标准是为了评估空间推理方法所推理得到的结果与实际地物的偏差。它的风险大小取决于推理结果与实际目标点的坐标之间的距离。其公式如式(6)及结果如表3所列。
(6)
式中:RNDDP、DDR、CRN分别代表距离偏差像素数的范围、距离偏差风险和推理得到的电塔数;(xp,yp)和(xo,yo)表示地物的实际坐标和推理结果坐标。
通过表3可以看到,在空间推理的误距风险几率中,低风险率基本在80%以上。这意味着,空间推理得到的结果坐标与实际坐标的偏差不大,基本能够获得地物的精准地理空间信息,符合我们的实验预期。

表3 误距风险
3 结论及下一步工作设想
在实验过程中发现,单纯的空间推理以及多条件推理下的结果具有高度依赖空间信息的特征,也就是说,预处理过程中获得的空间信息越准确其推理得到的结果则更精确。本次实验利用传统方法对SAR图像进行初步识别,然后借助空间关系、空间特征以及空间推理方法来实现有序分布的孤立构筑物的提取与推理。实验结果表明,采用本研究中的方法对有序分布的点目标物的识别与推理有着良好的精度。因此,本文中的方法为帮助SAR图像中有序分布的孤立构筑物识别提供了一种有效的解决方法,同时也为震后快速的震害识别及震害评估提供了基础。
需要说明的是,如果两种地物的图像特征比较相近,预处理中会将两种地物都提取出来,造成后续的空间信息的误判,导致其推理出来的目标点与远点距离有大的差别,从而在误距风险中出现高风险率;此外,实验中采用的FTP-CFAR算法对点状目标的识别与提取还有不少缺陷,还需要改进方法;另外,在电塔的目标识别中,空间约束推理保证了线性排列及数目,但是缺乏地形或环境影响,导致点数目过多的现象。因此,今后的工作重点是如何改进预处理方法,使空间信息的特征提取更为准确,如何令空间推理具有智能型,以适用于不同地形地貌环境。