连续多级船闸闸次自动识别与命名方法研究
2022-04-01杨全林
摘要:针对连续多级船闸运行过程中信息收集和过程干预行为(决策和指令输出)对人工的高度依赖性,建立了多级船闸船舶过闸过程时序复合运算模型。通过对多级船闸交通组织过程场景的分析,提出适应多级船闸排队分解过程信息特征的船闸运行闸次自动识别与命名方法,以过闸时间和空间顺序为依据,建立将船闸运行完整闸次分解并唯一标识的过程模型,完成过闸运行过程时序数据的分类和聚类,确立了多级船闸运行过程信息数字化实现方案。最后以三峡五级船闸运行过程为例进行验证,验证结果表明:以时间为标识的船闸运行过程时序复合运算模型和命名方法可行,该方法可为连续多级船闸运行协同性和智能化升级改造奠定基础。
关 键 词:连续多级船闸; 交通组织; 闸次识别; 过程命名; 时序复合运算; 数字化
中图法分类号: U641.7 文献标志码: A
DOI:10.16232/j.cnki.1001-4179.2022.01.034
0 引 言
船闸作为通过闸阀门控制,使船舶克服航道上集中水位落差的通航建筑物,按轴线方向闸室数目分为单级船闸和多级船闸,即只有一个闸室的为单级船闸,具有两个及以上连续闸室的为多级船闸。船闸运行组织方式因不同船闸所处环境条件而不同,但所有船舶通过船闸时,必须进行相应的充泄水工作,水域环境的不确定性给船舶航行带来安全风险。为了船舶安全过坝,必须在离大坝引航道外一定距离处等待,经过相应的编队、等待、过闸3个阶段[1-2]。多级船闸采取单向连续过闸方式,即第一闸室船舶进闸后,船闸开始运行,待首级闸门开启后,后续同向过闸船舶进闸,船舶过闸始终沿同一方向,以鱼贯式通过,呈现阶梯式上升或下降。由于船闸充泄水的需要,前后相邻两闸室之间需要一个无船舶(队)停靠的空闸室,才可保证连续多级船闸的连续运行[3]。船闸运行是船舶过坝的重要环节,同时也是航运调度的主要调度对象,经过多年运行实践,闸与船不能有效配合是导致枢纽通航管理目标不能顺利实现的症结。空间上,单向连续过闸过程中前后两船队仅相隔一个闸室,船舶过闸过程控制大体上是船舶航行、船舶调度指挥、船闸设备运行(含设备操作)、船闸输水(含充泄水)等动作的不断重复,分阶段的控制过程并未形成联贯馈通,在运输任务繁重时段,船闸过坝量激增就容易造成船舶排队现象。对连续多级船闸运行过程的分析,是建立数字化船闸的基础。船闸过闸运行本质上是一个枢纽通航的交通组织过程不断循环重复的场景,这种场景具有空间范围固定(船闸基础设施及位置空间相对固定)和过程相似度高的特征,其智能化的场景相对单一,其数据源多少和数据量大小决定了对算力的要求[4-7]。在船闸的通过能力不能满足过闸航运需求的背景下,如何挖掘船闸的通过能力以应对未来过闸需求的增长,提高船闸通航效率,是船闸行业需要面临的现实课题[8-10]。多级船闸运行过程的信息收集任务和过程干预行为均依靠人工完成,其效率受运行员技能水平、精力、情绪等因素影响,存在一定的波动性和提升瓶颈。
基于此,本文在船舶过闸排队过程及船闸运行过程分解的基础上,建立船闸运行时序复合运算模型,提出一种连续多级船闸运行时序过程命名方法,依据船舶过闸流程,以过闸时间和空间顺序为依据,命名各个船闸运行子过程并为其编制唯一标识,计算过闸船舶在各个子过程状态下的时间,再根据过闸计划下某一闸次开始时首级闸门开终时间,按照船闸运行时序复合运算模型计算得到船舶在各个过闸子过程的时间以及相邻闸次间隔时间,从而自动识别完整过闸闸次并为最佳发航时机建议提供依据。
1 连续多级船闸运行过程
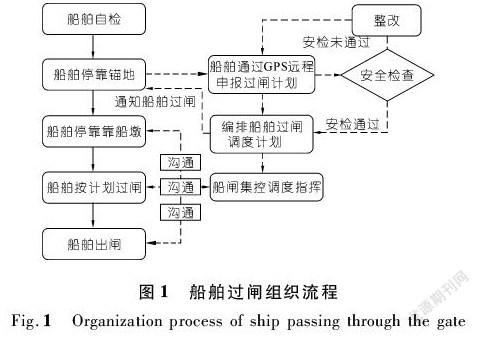
船舶进入船闸辖区(包括水域)后,过闸组织流程如图1所示。现行的船闸运行工艺流程,总体上是基于固定的船闸基础设施空间位置,以过闸船舶为诱因,形成的分段离散的过闸事件。受自然条件、船舶到达规律、航道和船闸运行规则等多种因素影响,船闸节点船舶交通流是一种受限交通流[2]。主要由船舶到达、待闸、逐级过闸、出闸等构成的多个独立事件可以抽象为船闸设备设施、船舶、运行员和闸室及引航道水位4个对象在同一时间点完成的非持续性事件,整个船闸的状态会随之发生转换[2]。船舶到达靠船墩待闸、导航墙靠泊、进闸航行、设备运行、出闸、出闸航行等事件在一定条件下被触发,使船闸由一种状态向另一种状态推进。
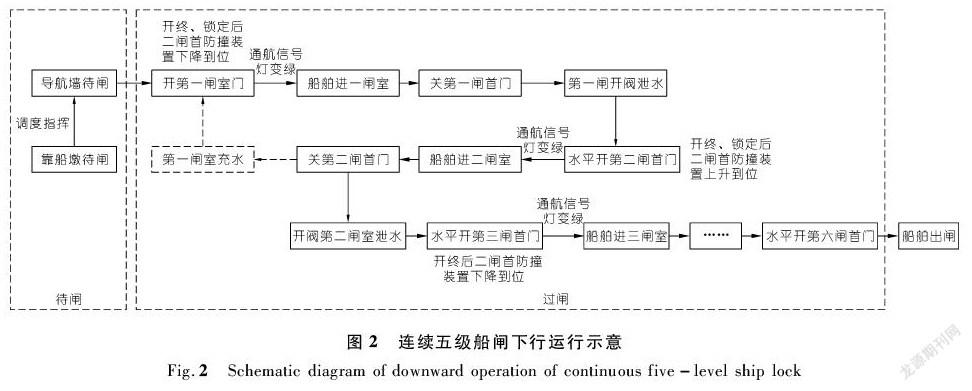
以连续五级船闸下行为例,船闸设备运行流程或工艺可简化为:船隊X根据运行级数和规定要求在规定时段和规定地点待闸,收到进闸指令后进入首级闸室并正确停靠。船闸运行人员关闭首级闸门,程序自动完成开阀输水和开启下闸首闸门等动作。当先行船队X自第二级闸室进入第三级闸室时,后续船队Y可由上游进入第一级闸室;当先行船队X自第四级闸室进入第五级闸室时,后续船队Y可由第二级闸室进入第三级闸室,第三批船队Z可由上游驶进第一级闸室。船闸中间级闸首设备运行工艺与船舶通过第一级闸室工艺基本一致。图2为连续五级船闸下行运行示意图。
船舶通过多级船闸的交通运输过程,是由船舶过闸航行过程、调度指挥过程、船闸设施状态转换过程(含控制系统自动运行过程)、船闸输水过程共同组成的一个复合型的排队过程。船闸运行员根据收集到的船舶航行过程信息,通过调度指挥过程对其进行干预,同时通过操纵船闸控制系统转换船闸设施状态和干预船闸输水过程,最终达到船舶过闸航行过程符合交通组织的预期目标[11]。图3为船舶过闸排队过程及船闸运行过程按4个基本过程分解的示意图。
2 多级船闸运行过程信息提取
2.1 多级船闸运行过程信息数字化需求
运行过程信息化是船闸运行智能化的基础。多级船闸运行作业,围绕着排队过程组成的随机服务系统运行每一个到达过程和伺服过程而展开。实现多级船闸智能化运行,首先要实现船闸运行作业过程的信息化,通过对运行全过程全要素的智能感知与通航调度系统、船舶安全监管系统的数据对接,为船闸运行过程实时仿真提供动静态数据。
2.2 多级船闸运行过程信息类型
通过上述分析,以数据类型为依据进行信息分类,船闸运行过程中船舶航行、排档指挥和船闸运行(含船闸设备设施状态转换和闸室及引航道水位转换过程)等过程数据可划分为表1所列6种基本数据类型。
如图4所示,船舶过闸航行过程信息中的船舶基本信息来源于已建立的船舶基本信息数据库,此时只需从数据库提取数据,船舶航行过程卫星导航信息,无论是北斗导航还是GPS定位信息,通过串口接收北斗/GPS定位信号,通过解析后即可获取船舶在船闸中位置、状态、航向、航速等信息,实现船舶过闸航行过程信息的采集。
排档指挥过程信息主要包括船闸通航调度信息和船舶交通管理信息。通航调度信息包括船舶过闸申报信息和调度计划。其中,过闸申报信息包括申报方式、申报时间、船舶信息、船舶过闸申报项目等;调度计划信息包括闸号、闸次、航向、驳数、定额载客(货)量、货种、实际载客(货)量、队形、过闸方式、过闸起止时间等;船舶交通管理信息主要包括雷达、AIS、VTS、CCTV、通过水文气象传感器设备和通讯技术手段获取的船舶动态、船舶闸次、航行环境等。
2.3 多级船闸运行过程信息采集方案
船闸的运行信息主要包括船闸控制系统运行信息、船闸设施状态转换过程信息、船闸水位转换过程信息和运行空间信息。船闸运行数据主要来源于现有的船闸控制系统,并且可从现有船闸控制系统中直接获取,其数据主要以结构化数据为主,参考典型的工业数据采集技术实现其数据的采集[12]。具体采集方案如图4所示。
在船闸运行过程中,大量用于控制系统感知检测的传感器向分析计算传感数据的主控平台持续发送大量字符型、浮点型等多种类型的数据,这些数据不断产生、更新,每个数据都能直接或间接地与一个时间戳(生成或更新等)挂钩,是典型的时序数据。因此可以按照时间序列数据分类和聚类的分析方法进行建模和过程命名[13-15],揭示支配时间序列的随机规律。
3 多级船闸运行过程命名方法
由前述分析可知,多级船闸交通运输过程的4个子过程所产生的运行信息绝大多数是时空数据,具有强力的时间属性和空间属性,既可以表述为时间序列数据,亦可以表述为地理空间数据。通过对船闸运行过程及过程中由船闸现有业务系统中运行决策、运行监视等相关的运行数据的感知、采集,得到了分段离散的大量时序数据,需要通过船闸运行过程的命名将时序数据转化为有用的信息(含时间属性和数据属性)。
图5是船闸运行过程命名方法的总体流程。通过上述采集方案进行通航调度系统、船闸控制系统和船舶GPS/北斗定位信息数据的感知、采集,大量分段离散的时序数据在数据处理平台经分类和聚类,进行关联、融合处理,在提取闸次计划和发航时间等信息后通过与闸次编号匹配并与船舶航行过程匹配,完成進闸初始化,即为船闸运行过程命名的起点。
以下行逐级连续运行方式为例,过闸船舶(队)由上游导航墙进入①闸室的过程命名为子过程A1,该过程包含船舶航行、排档指挥(交互)、船闸运行(包含船闸设备设施状态转换、船闸水位转换、船闸运行控制及过程监视等)等基本过程。船舶由①闸室移泊至②闸室的运行过程命名为子过程A2,主要包括船舶航行、排档指挥、船闸运行(包含船闸设备设施状态转换、船闸水位转换、船闸运行控制及过程监视等)等基本过程。船舶由②闸室移泊至③闸室的运行过程命名为子过程A3,同样包括船舶航行、排档指挥、船闸运行等基本过程。与此同时,另一个闸次运行过程开始,即该闸次船舶开始由上游导航墙进入①闸室的过程,此运行过程命名为子过程B1,依次类推。一个完整的船闸运行过程A,按照时空顺序包含了子过程A1、A2、A3、A4、A5……,可表示为多对象复合的时序过程A={A1,A2,A3,A4,A5……},另一个转步过程B={B1,B2,B3,B4,B5……},每一个过程都具有高度的相似性,依此类推,还有过程C、D……。如此多个运行控制子过程通过时间和空间顺序串连复合形成一个总过程,相应子过程的数据以时间标签进行相似连接,最后形成大量时序数据系列[13]。通过时间累加复合运算即可再现船舶过闸运行过程数据,建立起船闸运行过程时序复合模型。由此实现了船闸运行过程中各子过程的过闸时间、设备运行时间(含船闸设备设施状态转换和船闸水位转换时间)、船舶航行移泊时间、运行员排档指挥(含操作和复核)时间的自动计算。
根据连续多级船闸运行特点,当首级人字闸门开终,以该时刻作为计时起点,若某一闸次船舶进闸靠泊完毕,下一闸首开始开启输水阀门泄水,直至水平,然后开启人字闸门,船舶向下一闸室移泊。如此循环,船舶由一级闸室向下一级闸室移泊,船闸由一种状态向下一种状态推进。通过如图6所示时序复合运算,首级人字闸门开终时刻作为闸次A过闸开始时刻,那么直至下一次首级人字闸门开终时刻,该时刻是闸次B的开始时刻。五级下行取n=1,2次时间间隔ΔT可通过时序复合运算模型累加计算,可表示为ΔT=Tn+3-Tn=2tr+tn+4+tAn+tn+5+tBn+4
(1) 式中:tr表示运行员排档指挥时间(含操作和复核),tn+4和tn+5分别为n+4闸首和n+5闸首设备运行时间(船闸运行时间),闸次A移泊时间tAn和闸次B移泊时间tBn+4均是已知量或标准数值。因此,根据累计大数据统计,将该时间差取平均值作为闸次识别和匹配的条件参数,前一闸次累加ΔT标准数值即可计算后一闸次进闸开始时间。计算过程中MAX取最大时刻,即船舶最晚停泊完毕时刻。正常运行情况下,当前一闸次进闸时刻通过船闸控制系统感知得到后,通过累加ΔT标准数值,计算后一闸次准备进闸船舶的进闸开始时间,以此为依据,在前一闸次确定进闸时刻开始,其后一闸次可根据模型时序复合计算得到,从而识别完整闸次流程,并给出导航墙待闸船舶进闸调度智能预前提示和最佳发航时机建议。
4 实例验证
(1) 以三峡船闸为代表的连续多级船闸运行场景具有空间范围固定和过程相似度高的特征,决定了运行过程信息收集和过程衔接、干预行为对人工的强烈依赖性,运行过程信息是连续且有方向性的数据,即时间序列,针对其时序性特征利用时序数据挖掘的方法并借鉴工业数据采集技术,得到了连续多级船闸运行过程信息采集方案,可实现船闸运行信息的提取。
(2) 基于对运行过程数据时空特征分析,建立多级船闸船舶过闸过程时序复合运算模型,实现了船舶闸次自动识别判断,并提出适应多级船闸排队分解过程信息特征的船闸运行过程命名方法,确立了多级船闸运行过程信息数字化实现方案,得到了以时间标签为标识的船舶所在闸次编号与船闸控制系统运行数据的关联融合。利用运行过程时序数据,提取运行过程周期性规律,为闸次自动识别提供依据,三峡五级船闸运行过程实例验证了该方法的可行性。
(3) 通过与船舶航行过程信息匹配,探讨了船舶航行与船闸运行过程信息匹配问题,有助于实现船闸运行与船舶航行过程协同性和同步性。
参考文献:
[1] 陈晓关.提高三峡船闸通航能力的研究[D].武汉:武汉理工大学,2006.
[2] 刘敬贤,文元桥.基于船舶行为特征的港口航道通过能力仿真[J].大连海事大学学报,2009,35(2):31-37.
[3] 钟登华,王飞,吴斌平,等.从数字大坝到智慧大坝[J].水力发电学报,2015,34(10):1-13.
[4] 柯姜岑.基于元胞自动机的水运枢纽运输组织研究[D].武汉:武汉理工大学,2012.
[5] 陈明辉,盛黎.苏北运河船闸智能排档调度研究及运用[J].中国水运,2016,16(4):75-77.
[6] 高萍.数字三峡与船舶过闸的应用研究[D].大连:大连海事大学,2008.
[7] 赵阳,王国伟.智能化集中控制在智慧船闸建设中的应用探索[J].中国水运(下半月),2016,16(2):10-13.
[8] 徐振.船舶智能过闸系统的设计与研究[D].南京:南京林业大学,2014.
[9] SHI S,ZHANG D,SU Y,et al.A fuzzy-based decision-making model for improving the carrying capacity of ship locks:a Three Gorges dam case[J].Journal of Marine Science & Engineering,2019,7(244):1-21.
[10] 丁益,程细德,冯小检,等.提高三峡船闸运行效率的船舶过闸方式研究[J].人民长江,2015,46(4):63-66.
[11] 杨全林,李涵钊,陈鹏.三峡船闸运行调度人机集成设计方案研究[J].人民长江,2021,52(1):114-121.
[12] 李文璟,曾祥健,李梦,等.基于对称KL距离的用户行为时序聚类方法[J].电子与信息学报,2018,40(10):84-91.
[13] 黄旭,王伟恒,吴双,等 基于用电大数据的台户关系识别方法研究[J].供用电,2019,41(10):28-353.
[14] 徐任超,阎威武,王国良,等.基于周期性建模的时间序列预测方法及电价预测研究[J].自动化学报,2019(3):1-9.
[15] 朱坚.基于时序数据层次聚类方法的工业过程监控操作规则挖掘[D].北京:北京化工大学,2019.
(编辑:胡旭东)