无人机辅助通信中基于用户轨迹的无线资源和航迹优化
2022-03-31郎磊王荆宁王一赵子涛
郎磊,王荆宁,王一,赵子涛
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.通信网信息传输与分发技术国家重点实验室,河北 石家庄 050081)
0 引言
目前,通信网络的建立和实现主要依靠地面基站或其他固定通信设备,其灵活性受到了很大的限制,为了解决这一问题,无人机(UAV,unmanned aerial vehicle)辅助的无线通信作为一种新型的通信方式越来越受到人们的关注[1]。与地面固定基础通信设施相比,UAV 辅助通信网络具有许多优点,比如,UAV 在大部分时间里能够提供视距(LOS,line of sight)链路链接,通常具有更高的信道增益;UAV的高机动性和灵活性使其能够快速部署在需要建立通信的场景,同时降低了通信的成本[2-3]。为了充分发挥UAV 的潜力,UAV 辅助通信网络中资源分配和路径优化的研究至关重要。
现有的UAV 辅助通信研究主要分为三类,第一类是将UAV 作为地面节点通信中的移动中继。文献[4]提出通过合理设计UAV 的航迹,可以有效提高基于中继的UAV 通信网络的通信效率;文献[5]研究了UAV 辅助移动中继系统的资源分配和航迹优化问题,结果表明利用UAV 飞行过程中的信道变化来优化通信资源分配可以获得显著的吞吐量增益,显示了UAV辅助移动中继在未来无线通信系统中的巨大潜力。第二类是考虑无线传感器网络场景或者UAV 辅助移动边缘计算(MEC,mobile edge computing)场景,利用UAV 高机动性来辅助无线传感器的数据采集或辅助移动边缘计算的任务卸载[6-7]。文献[8]通过联合优化航迹、任务数据和功率分配来最小化能量消耗,着重于设计一种能量高效的资源分配和计算任务卸载方法。第三类是将UAV 作为移动基站为地面用户提供通信服务[9-10],UAV 的高机动性和灵活性可以快速建立通信连接并且显著提高数据传输效率。文献[11]发现利用UAV 的机动性所带来的可控信道变化可以获得显著的吞吐量增益,证明了在UAV 辅助通信系统中进行功率分配和轨迹优化的可行性;文献[12]通过确定蜂窝网络中UAV 的数量和用户通信调度并优化UAV 的位置,来保证所有用户通信服务的公平性。
目前,大部分的研究都是建立在地面用户位置固定的情况下,而现实场景中地面用户往往是移动的,对于移动用户来说,通过动态地获取瞬时信道状态信息比较困难,而且实时获取信道也会使系统开销过大,但当用户的移动路径可以预测时,可以利用预测的用户路径提前获取具有前瞻性的统计信道状态信息,这样可以有效降低信道获取的复杂度。文献[13]提出了一种基于动态规划的多用户多输入多输出(MIMO,multi-input multi-output)系统功率分配与用户调度联合算法,但只考虑了用户选择的动态调度方案,并没有考虑多个移动用户的场景;文献[14]提出了一种利用航线信息提前获取大尺度信道状态信息来提高通信中能量效率的海上通信方案,结果表明利用用户的航线信息可以有效降低系统功耗,但没有考虑可移动基站的灵活机动性能够带来的系统性能提升。因此,本文针对UAV作为移动基站为地面用户提供通信服务的场景,考虑地面用户的移动路径可以预测的情况下,研究UAV辅助移动用户通信的资源分配和航迹优化问题。
本文主要的研究工作如下。
1)针对UAV 辅助移动用户通信的下行无线传输系统,提出了一种基于用户轨迹的UAV 辅助通信系统资源分配和航迹优化方法。以最大化用户的最小平均速率为目标,建立了一个联合优化UAV通信带宽分配和飞行航迹优化的问题。该问题是一个非凸优化问题,要优化的变量之间存在非线性耦合,很难直接求得最优解。
2)通过引入辅助变量和分离变量交替优化的方法,将原问题分解为2 个可以求解的近似凸优化子问题,并利用连续凸逼近(SCA,successive convex approximation)方法对2 个子问题交替迭代优化,得到原非凸问题一个近似次优解,同时介绍了本文交替优化算法的步骤。
3)仿真结果表明,本文所提方法能够有效提高用户的平均数据吞吐量,在保证所有用户的通信质量的前提下,提高了UAV 辅助通信的效率。
1 系统模型
针对UAV和移动用户组成的下行无线传输网络,将一架UAV 作为移动基站为N个运动轨迹已知的用户提供数据传输服务,系统模型如图1 所示。在UAV辅助通信的时间内,所有用户在每一时刻都要与UAV进行通信,为了消除用户与用户之间的信号干扰并简化系统模型,UAV 与用户之间采用频分多址(FDMA,frequency division multiple access)技术进行数据传输。
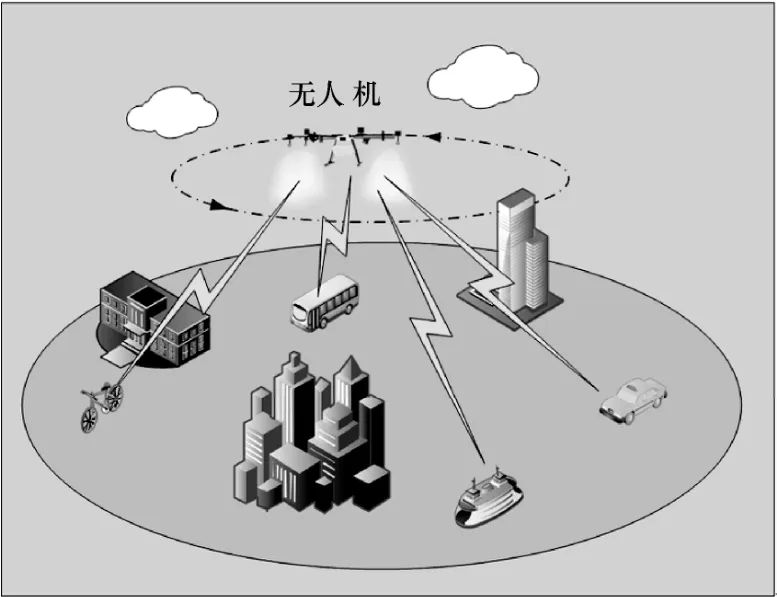
图1 系统模型
由于UAV 与用户都是移动的,为了便于描述UAV和用户的位置,将总服务时间T划分为M个时隙,每个时隙的长度为,假设时隙的长度足够小,在每个时隙中UAV和用户的位置保持不变。UAV 在飞行过程中的高度固定为H,因此在每个时隙内UAV 位置可以用qm=[xm,ym],∀m∈{1,2,…,M}来表示,第n个用户的位置可以用来表示。此外,UAV 在执行任务时,起飞和着陆一般固定在指定位置,因此UAV的起始位置分别表示为q0=[x0,y0]和qF=[xF,yF]。考虑到UAV 一般存在着最高飞行速度的限制,假设最高飞行速度为V,因此对UAV在服务时间内的位置有以下约束
UAV 在一定高度与用户之间进行通信时,大部分时间都存在视距传输路径,因此采用自由空间路径损耗模型。由于UAV 的高度固定为H,在接下来的分析中只需要考虑UAV和用户的平面坐标位置即可,因此,在第m个时隙中UAV 与第n个用户的信道增益gn,m可以表示为

其中,β0是在参考距离d=1 m 处的信道功率增益。
假设UAV 给每个用户分配的发送功率为固定值p,总带宽为BT,每个飞行时隙内用户接收到的速率可以通过UAV 给用户分配的带宽来调节控制,用Bn,m表示UAV 在第m个时隙分配给第n个用户的带宽,所以第n个用户的平均可达速率为

其中,σ2为噪声功率谱密度。为了保证所有用户与UAV 之间通信的公平性,通过优化UAV 的飞行航迹和带宽分配,最大化用户的最小平均吞吐量,联合优化的问题可以表示为
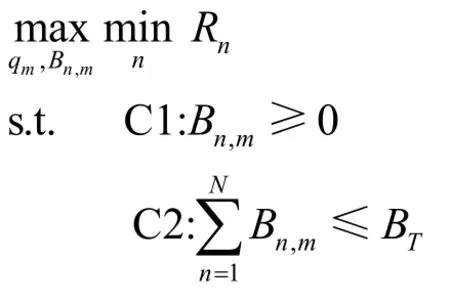
约束C1和C2 是带宽预算限制,约束C3~C5是UAV 最高飞行速度限制。由于式(4)的目标函数和约束都是非凸的,因此优化问题是一个非凸优化问题,一般来说,没有一个标准的凸优化方法能有效解决这个问题。接下来,将该优化问题分解成2 个子问题分别求解,并介绍一种两层交替迭代算法来求解该问题的一个近似次优解。
2 基于用户轨迹的UAV 辅助通信系统资源分配和航迹优化方法
由于联合优化UAV 飞行航迹和带宽分配问题的目标函数是非凸的,为了将目标函数转化为凸函数方便进一步优化求解,通过引入辅助变量S来表示用户的最小平均吞吐量,式(4)可以重新表示为

式(5)仍然是非凸优化问题,需要优化的变量(Bn,m和qm)之间存在非线性耦合。但是,当UAV的飞行航迹已知时,可以通过式(2)计算得到UAV与用户之间的信道增益,此时,优化用户UAV 的带宽Bn,m可以得到Rn的一个下界。基于此,提出一种两层交替迭代优化方法分别优化变量Bn,m和qm,具体步骤为给定qm,求解出最优的Bn,m,再根据求解出的Bn,m更新最优的qm,不断交替循环优化,直到目标函数收敛。因此,首先,将原问题分解成2 个子问题(给定航迹的带宽优化和给定带宽的航迹优化)分别求解;然后,提出交替优化算法求解原问题。
2.1 子问题1:给定航迹的带宽优化
当UAV 航迹给定时,式(5)可以重写为
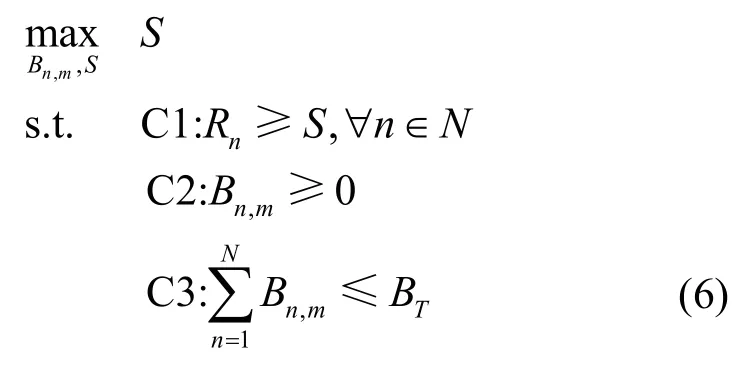
式(6)是一个凸优化问题,可以通过凸优化工具CVX 来求解。
2.2 子问题2:给定带宽的航迹优化
当UAV 的带宽分配确定后,可以通过求解以下子问题来确定UAV 的航迹
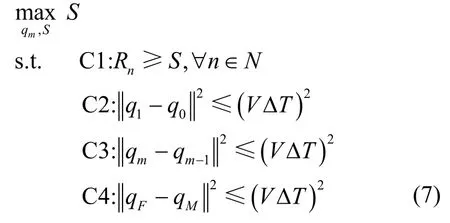
约束C1 是非凸的,为了求解该问题,使用连续凸逼近方法[15]来处理该非凸约束,利用约束C1 的一个近似下界代替约束C1,松弛约束条件,并对该近似下界进行迭代计算逼近原来的非凸约束。
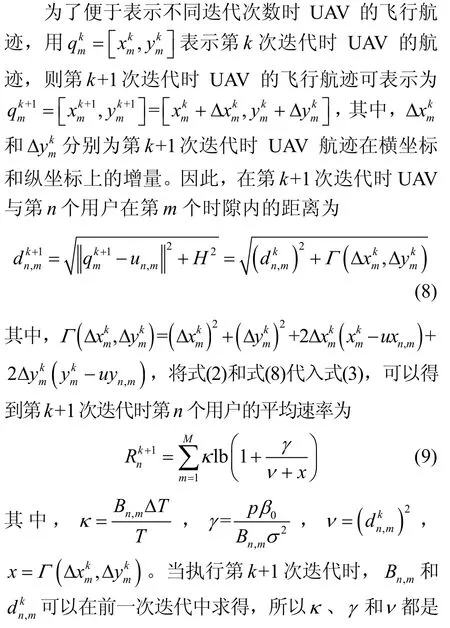
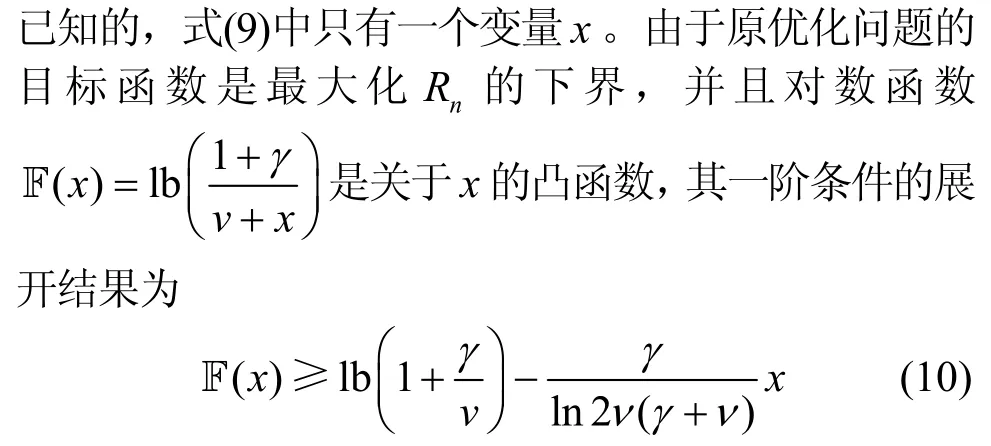
根据式(10),可以推导出

当给定第k次迭代时UAV 航迹的结果时,可以通过求解以下优化问题来得到第k+1次迭代时的最优UAV 航迹
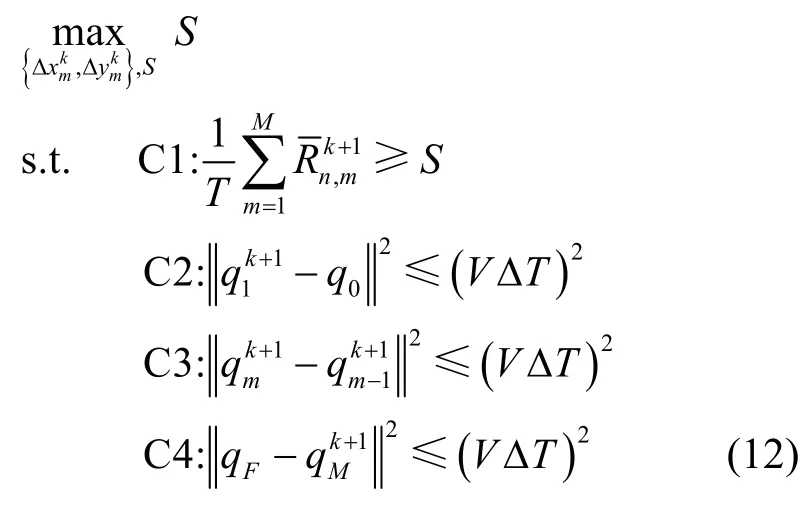
式(12)是一个凸优化问题,可以通过凸优化工具CVX 等来求解最优解。由于优化的变量是每次迭代中坐标位置的增量,因此可以使用连续凸逼近方法得到一系列非递减的值来不断逼近原目标函数的真正下界,并且保证了目标函数在迭代过程中的收敛性,从而得到优化问题的一个近似次优解。
2.3 交替优化算法设计及其复杂度分析
由于原优化问题是一个联合优化UAV 带宽分配和飞行航迹的非凸优化问题,很难找到全局最优解。为了找到该优化问题的一个次优解,通过将式(4)分解成2 个子问题来交替优化求解,获取原问题的一个近似次优解,其核心思想是先给定UAV 的初始航迹q0,根据式(6)优化UAV 的带宽分配Bn,m,再根据更新后的带宽Bn,m,使用连续凸逼近方法优化UAV 航迹qm,即求解式(12)得到UAV 航迹在横坐标和纵坐标上的增量,通过增量更新航迹,然后不断交替迭代,直至目标函数收敛,得到一个近似次优解,算法1 详细描述了该算法的实现过程。通过所提的交替优化算法得到一个复杂度可以接受的近似次优解,由于该算法中目标函数的下界是通过求解一系列非递减的值来不断逼近得到的,并不能保证全局最优性。
算法1交替优化算法
初始化UAV 航迹q0和迭代次数k=i=0
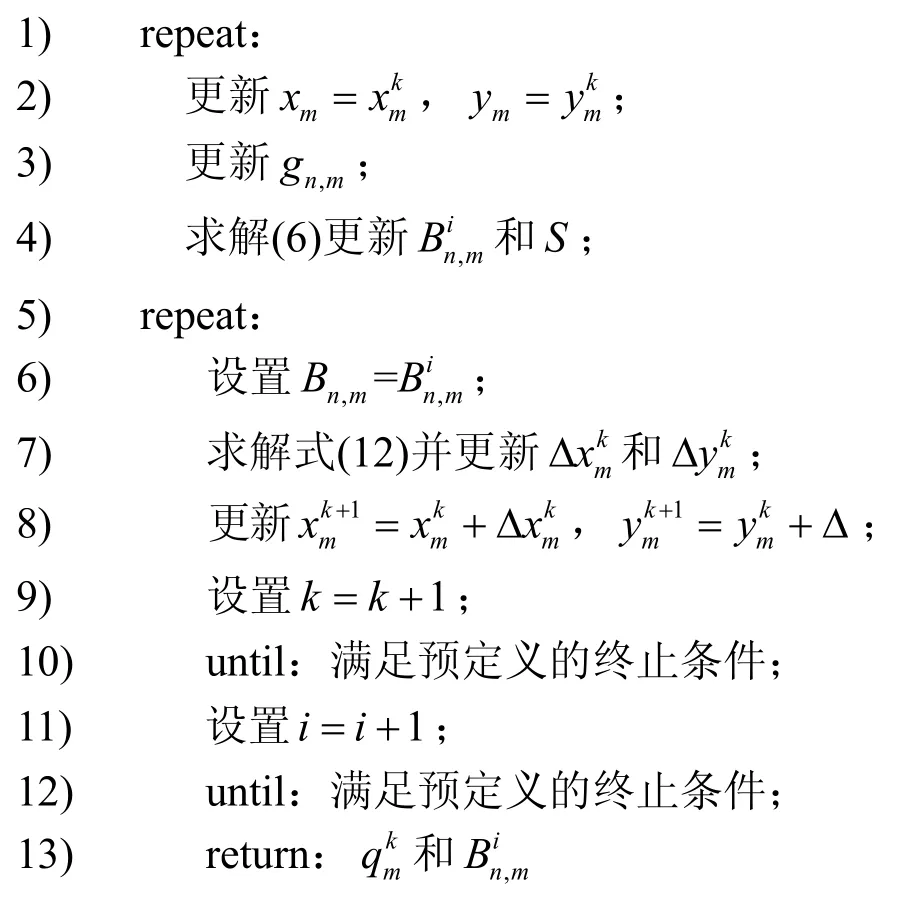
通过算法1 可以得到一个飞行时隙中UAV 的优化坐标和带宽分配,对总飞行时间T中的M个时隙进行分别优化,就可以得到UAV 的航迹优化结果。由算法1 的具体过程可以看出,该算法的关键在于交替优化带宽和无人机的航迹,每次迭代中算法的复杂度主要集中在步骤4)和步骤7),需要求解2 个凸优化问题。根据文献[16],利用内点法求解步骤4)和步骤7)的计算复杂度分别为O((MN)3)和O((2M)3),其中M为无人机总飞行时间划分的时隙数,N为无人机服务的用户数。
3 仿真分析
为了验证本文方法的有效性,通过MATLAB 软件仿真来分析和评估算法1。假设系统在一片半径为500 m 的圆形区域上,有3 个沿着已知轨迹运动的用户,如图2 所示。其中,用户1和用户3 的初始坐标均位于位置3(250,67),分别向位置1(1 000,500)和位置2(250,933)做匀速直线运动;用户2 从位置2出发,向位置1 做匀速直线运动。UAV 与用户通信的总服务时间T=50 s,划分为50 个单位长度为1 s的时隙,由一架UAV 为这3 个移动用户提供通信服务。UAV 的飞行高度H固定为100 m,与每个用户通信的发送功率P=5 W,可用于分配的总带宽BT=5MHz,其余相关的无线信道参数设置如下:在参考距离d=1 m 处的信道增益β0=-5 0dB,噪声功率谱密度σ2=-174 dBm/Hz。
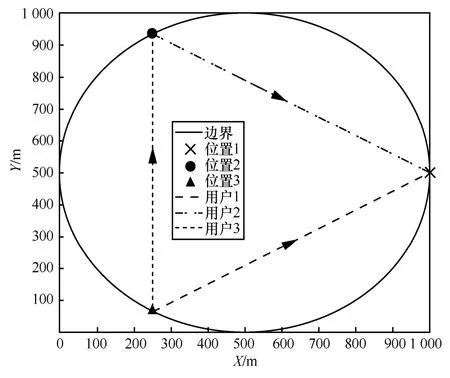
图2 用户运动轨迹
仿真验证了本文所提方法中UAV 航迹优化的有效性。图3~图5 分别为UAV 在不同情况下飞行航迹优化的结果,考虑了UAV 不同的起点和终点以及不同的最高飞行速度限制的3 种情况。情况1 下的UAV 最优航迹如图3 所示,UAV 的起点和终点都设置为(500,500);情况2 下的UAV 最优航迹如图4 所示,UAV 的起点和终点都为位置3(250,67);情况3下的UAV 最优航迹如图5 所示,UAV 的起点为位置3(250,67),终点为位置2(250,933)。从图3~图5可以看出,尽管UAV 起点和终点的位置不同,但是这3 种情况下的UAV 最优航迹都尽可能地靠近用户的运动轨迹,缩短与各用户之间的距离,这表明优化后的航迹使UAV 与用户之间的距离更近,让UAV 与用户之间通信的大尺度信道状态信息更好,从而提高用户的平均吞吐量。此外,当UAV的最高飞行速度分别设置为25 m/s、30 m/s、35 m/s和40 m/s 时,最优的飞行航迹也有所不同,随着最高飞行速度的增加,UAV 在服务时间内飞行的距离和飞行航迹的复杂度也随之增加,这表明UAV 的飞行速度越快,飞行航迹可以优化的空间也就越大,航迹优化的效果也越好。
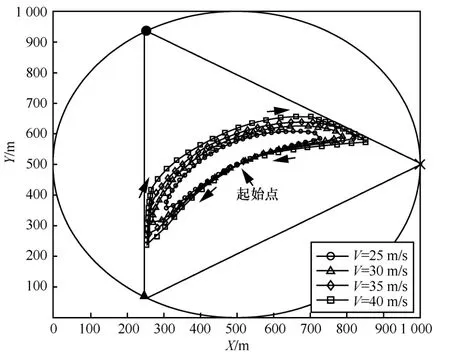
图3 情况1 下的UAV 最优航迹
图4 情况2 下的UAV 最优航迹
图5 情况3 下的UAV 最优航迹
图6~图8 给出了不同情况下UAV 分配给3 个用户的带宽。结合图3~图5 的UAV 最优航迹可以看出,用户之间的带宽分配取决于UAV 与用户之间的距离,当用户距离UAV 较远时,UAV 会多分配一些带宽给该用户来提高其平均吞吐量。当多个用户与UAV 之间的距离都差不多时,UAV 倾向于让这些用户平均共享带宽。这表明,优化后的UAV带宽分配尽可能满足了每一个用户对通信质量的需求,由于优化问题的目标函数是最大化用户最小平均吞吐量,为了提高信道状态信息较差的用户的平均吞吐量,UAV 会多分配带宽给这些用户来提高其通信质量,保证了通信的公平性。
图6 情况1 下的UAV 带宽分配
图7 情况2 下的UAV 带宽分配
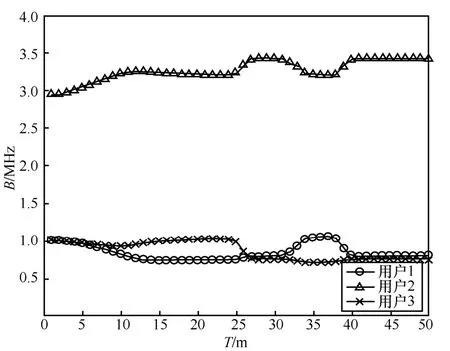
图8 情况3 下的UAV 带宽分配
图9 给出了3 种情况下用户平均速率随UAV 最高飞行速度变化的情况,其中V=0时表示UAV 在起点位置固定不动与用户通信的平均速率。从图9 可以看出,当飞行速度提高时,UAV 可以在有限的时间里更快地接近位置较偏远的用户,更高效地到达与所有用户通信的最佳位置,从而提高用户的平均速率。
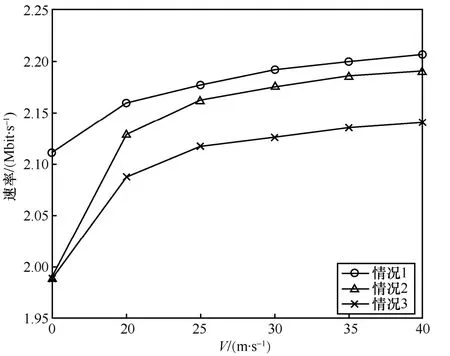
图9 用户平均速率随UAV 速度的变化
为了评估本文所提方法的收敛性,对不同情况下交替迭代优化方法的收敛次数进行了比较,如图10 所示。从图10 可以看出,3 种情况分别在第6 次、第7 次和第9 次迭代后达到了收敛条件,说明本文所提方法具有收敛性,进一步验证了本文所提方法的有效性。
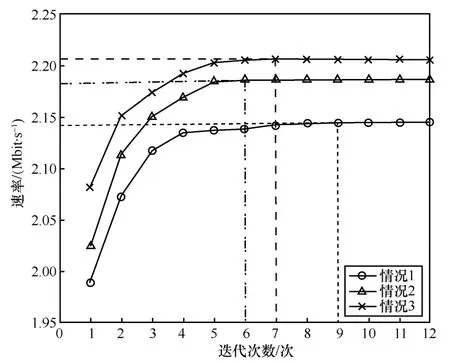
图10 所提方法收敛性的验证
最后,对本文所提方法的性能进行了评估。由于现有文献[17]中UAV 的航迹优化通常是在带宽平均分配的基础上进行的,因此图11 对比了本文所提方法与2 种常见的带宽分配优化方法的最小用户速率。第一种方法是优化UAV 的航迹,根据服务的用户数来平均分配带宽;第二种方法是优化带宽,但UAV 始终以固定航迹飞行来为用户提供服务;第三种方法是本文所提的联合优化UAV 航迹和各个用户之间的带宽分配。从图11 可以看出,相比于平均分配带宽以及UAV 固定航迹飞行,本文所提方法可以显著提升最小用户速率,保证多个用户之间通信的公平性。综上所述,本文所提方法对提高用户的通信质量有很大帮助。
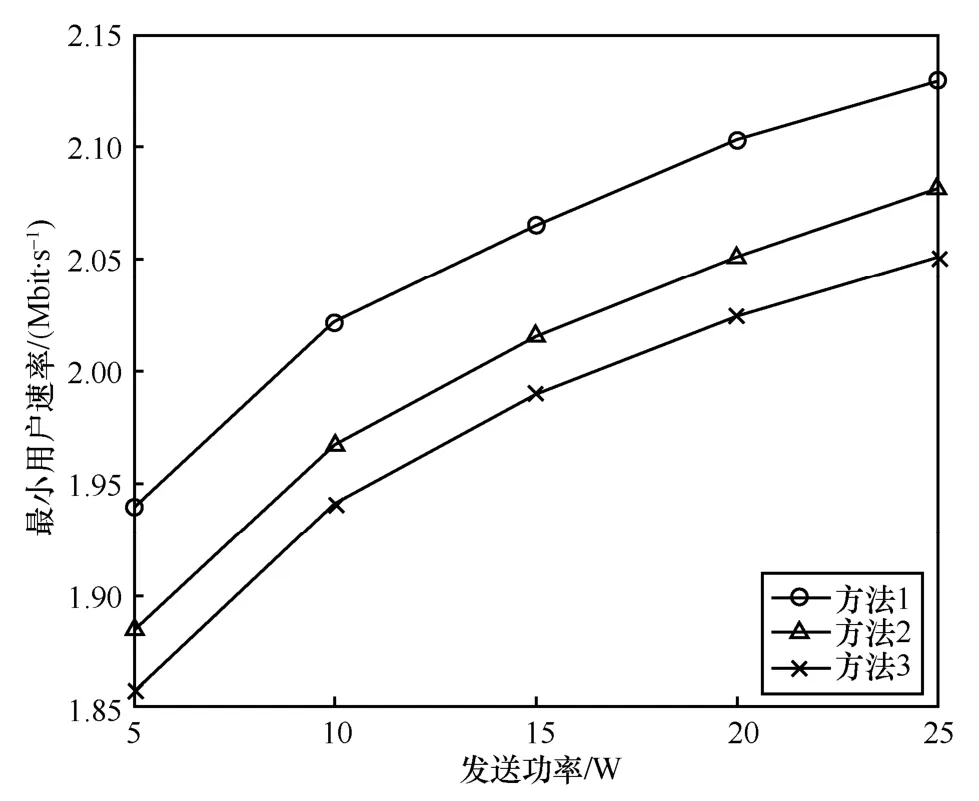
图11 3种分配优化方法下的最小用户速率
4 结束语
本文对基于用户轨迹的UAV 辅助通信系统资源分配和航迹优化方法进行了研究。以最大化用户的最小平均速率为目标,建立了一个联合优化UAV通信带宽分配和飞行航迹优化的问题。通过引入辅助变量和分离变量交替优化的方法,将原优化问题分解为2 个可以求解的近似凸优化子问题,并利用连续凸逼近方法对2 个子问题进行交替迭代优化,得到原非凸问题一个近似次优解。仿真结果表明,所提方法能够有效提高用户的平均数据吞吐量,在保证所有用户的通信质量的前提下,提高了UAV辅助通信的效率。
