采用最小熵准则的多传感器任务分配方法研究
2022-03-31杨华明石春燕班阳阳刘亚帅
杨华明,石春燕,班阳阳,刘亚帅
(中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
为了在现代信息战争中实现对目标的多角度快速发现和截获,现代舰艇均装配有集成警戒、跟踪、导航、识别等多个功能的多型多部雷达、光电、电子侦察等传感器设备[1-3];在复杂电磁环境、杂波环境[4]中,为了更好地应对高速高机动目标[5]、隐身目标[6]、无人机集群目标[7]等新型目标的威胁(如采用多方位、多批次、饱和式[8]等方式攻击),将舰艇雷达、光电、电子侦察等多部多型传感器设备有机组织、形成综合探测能力,已成为舰艇综合探测系统发展的一种趋势。
多传感器设备的高效组织、综合探测能力的形成要求对多型传感器设备进行统筹调度综合控制、对多传感器探测信息进行联合信息处理,才能形成统一的综合探测态势信息,其中任务综合管理及资源统筹调度是多传感器设备实现综合探测能力的关键技术之一。对传感器资源调度的颗粒度和控制的耦合度决定了综合探测资源的利用精细水平以及决策调度的灵活程度,这也是影响综合探测效能的重要因素。多传感器设备控制耦合度可分为4级:一级是基于传感器模式管理,即控制传感器的工作模式设置,并可针对部分任务进行低频度干预性管理,这些任务一般时敏性不强;二级是基于任务分配管理,即将一个任务完全交给一个设备承担,这种方式易于实现,但综合效能较低;三级是基于任务进程管理,即按探测任务时间进程实时计算相应探测设备的执行时隙和执行参数,并发送到相应探测设备,这种方式对任务管理实时性要求较高,实现起来有一定难度,但综合效能较高;四级是基于任务细粒度管理,即探测设备波形和参数控制,是强实时性深度控制,实现难度大,但效率高。
目前,基于任务分配管理一直是多传感器综合探测的主要手段,而基于任务进程管理、基于任务细粒度管理等方面的研究主要针对单一传感器任务分配问题,而对多传感器任务分配问题鲜有公开报道。由于多传感器之间在体制、性能、指标等方面存在较大差异,传统的基于任务进程管理、基于任务细粒度管理的单一传感器任务分配方法研究成果不能直接应用于多传感器任务分配。
本文基于最小熵的任务分配方法着重用于解决基于任务进程管理的多传感器任务分配问题,在分析任务管理及资源调度的功能和典型流程的基础上聚焦任务分配的内涵与限制因素,进而提出了基于最小熵的任务分配准则,并通过仿真验证了算法的有效性。
1 任务管理及资源调度的功能和典型流程分析
舰艇平台综合探测任务管理及资源调度的目标是以最低的资源开销、匹配的任务调度策略,最高质量地完成探测任务,实现各传感器能力的充分发挥,从而提高综合探测的效能。任务管理及资源调度是针对当前的任务集合,通过任务周期规划和分析实现优先级排序,按照优先级顺序生成和优化任务分配方案,完成任务下达和各传感器任务执行列表生成。任务管理及资源调度主要包括任务解析、全任务周期规划、单执行周期规划、传感器任务适宜度分析、任务优先级分析、单执行周期任务分配方案生成及优化、资源适宜性评估、综合效能评估、任务下达等,如图1所示,其中全任务周期规划、单执行周期规划及传感器适宜性分析等内容不是本文主要研究内容,不作赘述。
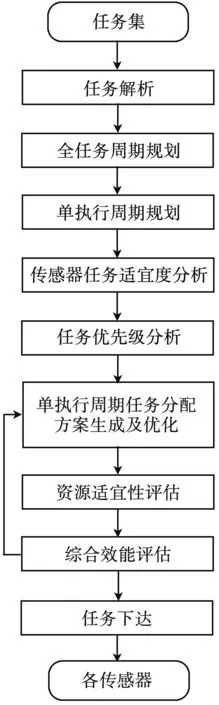
图1 任务管理及资源调度流程
2 任务分配的内涵和制约因素
任务分配就是在当前确定要完成的任务之后,按照一定原则将任务分配给参与综合探测的各相关传感器,并明确各个任务执行的参数要求,使整体任务执行效果、任务调度成功率、任务执行效果和期望的匹配度尽可能优化。由于各传感器设备在探测威力、覆盖范围(含遮挡)、探测精度以及抗干扰和反杂波能力等方面存在差异,首先要进行任务适宜度分析,将任务分配到可胜任的传感器,以保证任务完成的质量符合预期。在满足任务适宜度的基础上考虑任务匹配性,准则就是将有匹配要求的任务优先分配到匹配的探测设备执行。
舰艇平台是一个多任务系统,往往可能同时面对空、海、陆、潜多方面作战,因此警戒探测装备需要能够同时执行多种探测任务,满足多种不同应用和用户的信息需求。舰艇平台综合探测的任务管理及资源调度面临如下问题:
(1) 任务限制因素
每项任务都有其限制因素,一般包括任务执行时间、任务耗用资源[9]、任务质量要求等方面。
(2) 探测设备能力限制
探测设备的能力限制主要体现在覆盖范围、威力范围、跟踪能力、探测精度[10]、分辨力、多任务能力以及雷达调度控制能力等方面。
(3) 环境影响
环境因素主要有电磁环境、杂波环境[11]、能见度和电磁传输条件等,都影响探测设备对目标的探测能力。
(4) 目标影响因素
影响主动探测设备探测和跟踪能力的目标因素主要有目标等效散射面积[12]、目标运动速度、加速度、目标角速度等。
(5) 信息用户的匹配性要求
一般情况下,作战指挥决策设备、武器系统设备、本舰导航设备及其他有信息引导需求的设备、不同探测设备等输出的信息在误差分布特征方面、系统差与环境状态的对应关系方面、对不同运动目标的响应方面等存在一定差异。为满足武器系统等设备对精确信息保障的要求,需要探测设备与其保障设备具有一定的匹配性。
(6) 不同方向任务的差异化要求
在不同的探测方向上,目标的分布情况以及任务的分配情况各不相同,在调度时应考虑资源的可达性,并选择合适的准则。
(7) 饱和情况下的作战要求
任务饱和是指任务集合所需要的资源总量大于所有探测资源量总和。在任务饱和情况下,必须按一定准则选取执行任务,有些任务必须放弃。
在任务过饱和情况下,为提升总体效能,采用降额与优选相结合的任务分配处理方式。为充分发挥各探测设备的能力、最大限度完成任务,本文提出了采用最小熵的任务分配准则,在最大程度上保证任务调度成功率。
3 最小熵准则的任务分配模型构建
舰艇平台综合探测系统的任务分配优化原则是:
(1) 重要的任务优先,且保质量完成执行;
(2) 利用现有的传感器资源,尽可能多地执行任务;
(3) 在保证任务完成执行情况下尽量提高任务执行的质量;
(4) 充分发挥各传感器尤其是能力较差传感器的作用。为满足任务分配优化原则要求,最大限度地发挥各传感器设备资源,尽可能保证能力需求强的任务得到较好执行,能力较弱传感器优先执行低质量要求任务,本文提出了一种基于最小熵准则的任务分配模型,用于实现任务分配方案的生成和优化。
最小熵定义:每一条“知识”存在一个固定熵值,代表其本质的信息量,但在对“知识”未彻底掌握前,估量“知识”的过程会带入未知因素信息,造成估量的“知识”熵值是其固定熵值的上界,采用最小熵估计意味着降低“知识”熵值的上界,减少未知因素影响,逼近固有信息熵值。
本文提出的最小熵准则中的“知识”是希望任务资源消耗较少的任务优先分配到能力较弱的传感器执行,即追求资源质量能积P最小的准则,其中P是任务消耗资源与执行任务传感器能力值的乘积和。
假设舰船综合探测系统共有N部传感器,将n个任务分配到这N部传感器执行,则每个任务消耗的资源为
T=[T1,T2,…,Tn]
(1)
且每个任务对应的执行任务传感器能力值为

(2)
若使任务分配结果最优,则约束条件为
minP=T·G
(3)
式中,P为n个任务的资源质量能积;Tj为第j个任务消耗资源;Gj为第j个任务执行探测设备能力值。
资源质量能积P的物理意义是任务分配的匹配程度,即资源质量能积较小时,表示能力较弱的传感器优先分配执行资源消耗较少的任务,以保障能力较强的传感器尽可能执行资源消耗较大的任务。
任务消耗资源T的衡量指标是执行任务所需要的时间。任务消耗资源计算式如下:
(4)
式中,c为电磁波在空气中的传播速度;R为探测目标到传感器的距离;m为传感器完成目标探测任务所需要的探测周期数。
探测设备能力值G的主要衡量指标是最大探测距离和精度,其计算式为
G=aGr+bGs,a+b=1
(5)
式中,Gr为距离能力值;Gs为精度能力值;a和b为根据具体综合探测系统组成与任务使命确定的两个系数:当探测系统对距离能力要求较高时,设置系数a>b;当探测系统对精度能力要求较高时,设置系数a 距离能力值Gr和精度能力值Gs采用序位计分法计算能力值,即对综合探测系统所有的探测设备按单项指标大小进行排序,按序位确定该项指标的能力值大小,忽略其指标差距的影响。根据综合探测系统探测设备的组成确定序位积分的准则。等间隔计分是一种简洁的方式,适用于大部分情况。对于部分综合探测系统,存在两部设备绝对能力相近的情况,为增加相邻两探测设备调度的灵活性,需要降低其能力值的差距;或某探测设备绝对能力明显高于其他探测设备,留用执行困难任务,需要加大能力值差距,也可采用不等间隔的计分方式。能力值宜设定在(0, 1]区间,最低能力值不能为0。 另外,有些特殊的任务只有少量或单一探测设备能够胜任,则任务分配中不用进行能力值判断,通过适宜度判断即可,如专用识别探测任务等。 最小熵准则的任务分配流程如下: (1) 计算各探测设备的能力值,得出探测设备能力值从小到大的排序; (2) 按任务优先级顺序取出待分配任务; (3) 按资源质量能积最低优先准则,将任务分配到能力值最低的探测设备。 为了验证最小熵任务分配准则的有效性,本文根据最小熵任务分配准则需求,设定了传感器设备参数、跟踪类任务参数及应用场景,并在此基础上进行了100次的蒙特卡罗仿真试验,对比分析了本文最小熵算法与传统随机分配算法。 假定使用3部传感器即雷达1、2、3对目标进行综合探测,传感器的探测范围及精度参数如表1所示。 表1 3部传感器的相关参数 主要针对单方向饱和的跟踪任务执行情况进行分析,且设定的跟踪类任务分为粗跟、精跟、目指跟踪及火控跟踪4种。各类跟踪任务的精度要求如表2所示。设定粗跟任务采用3脉冲跟踪方式;精跟、目指跟踪和火控跟踪任务采用8脉冲跟踪。跟踪任务耗费的时间资源分为4档:30 km、60 km、120 km和210 km,对应的单个脉冲消耗的时间资源分别为200 μs、400 μs、800 μs和1 400 μs。 表2 4种任务的相关参数 在仿真中,仅考虑单方向45°扇区内饱和的跟踪任务执行情况。假定3部雷达都为旋转体制雷达,天线转速均为30 r/min,单方向45°扇区对应的时间资源为250 ms,且50%的时间资源用于跟踪任务,通过100次蒙特卡罗试验,采用任务调度成功率[13](Scheduling Success Ratio,SSR)、任务调度时间利用率(Time Utilization Ratio,TUR)及任务执行威胁率(Threat Ratio of Executed,TRE)3种评估指标[14-16]对3部雷达共视区内跟踪任务的完成情况和资源利用情况进行对比分析,其中SSR指成功调度的任务数量与请求调度的任务数量之比,调度成功率越高,算法性能越好;TUR指成功执行的所有跟踪任务所用时间与可用于执行跟踪任务的时间资源的比值,时间利用率越高,算法性能越佳;TRE指调度成功的任务所具有的目标威胁度总和与请求任务目标威胁度总和之比,执行威胁率越高,算法性能越好。 蒙特卡罗仿真实验结果如图2所示,其中图2(a)、(b)、(c)分别为最小熵准则分配算法与随机分配算法的调度成功率、时间利用率和任务执行威胁率对比。 图2 调度性能对比 可以看出,随着跟踪任务的增加,随机分配算法在目标数达到95批时任务已经开始丢失,执行威胁率也随之下降,但其资源利用率约为82%;本文采用的最小熵准则分配算法在目标数达到105批时任务才开始丢失,其资源利用率基本接近90%。虽然随着任务量的增加,两种算法的资源利用率最终都可以达到99%以上,但在任务数接近饱和过程中,本文算法执行威胁率大于随机分配算法的执行威胁率。 与随机分配算法相比,在可用时间资源相同且保证执行威胁率为100%的情况下,本文算法能够成功执行的跟踪任务数更多;在执行威胁率由100%下降到90%的过程中,本文算法的时间利用率和任务调度成功率都更高,所以本文算法的抗饱和任务能力更强。 针对舰艇综合探测系统中多个传感器任务分配问题,首先分析了任务管理及资源调度流程中的任务分配内涵和制约因素,在此基础上采用最小熵准则设计了一种系统任务分配方法;通过仿真试验与基于随机分配准则的任务分配方法进行对比,验证了基于最小熵准则的系统任务分配方法的有效性。与基于随机分配准则的算法相比,基于最小熵准则的任务分配方法可以充分利用时间资源,实现更多任务的成功调度,且抗饱和任务能力更强,可以为后续的实际工程应用提供重要参考。4 仿真分析



5 结束语
