CAN智能节点下拖拉机动力换挡变速器控制系统研究
2022-03-23鲁力群倪慧亭尹永芳
王 毅,鲁力群,孙 萌,倪慧亭,尹永芳
(山东理工大学 交通与车辆工程学院, 山东 淄博 255049)
目前,CAN(controller area network)总线技术已从汽车领域扩展到农机领域,在国外,CAN总线技术已广泛应用于拖拉机整车通信,技术较为成熟。而我国拖拉机目前还没有采用CAN总线通信技术,中国农业大学、南京农业大学等研究单位对拖拉机CAN总线协议的应用层进行了相关理论研究,但对于网络分布式控制及网络管理等方面研究还较为缺乏,基于CAN总线的拖拉机控制系统还没有形成市场化产品[1-4]。
CAN总线控制系统有2种拓扑结构:集散式控制和分布式控制。目前,总线控制的拖拉机普遍采用整车控制器(vehicle control unit,VCU)对各个控制对象进行集散式控制,以集中的监视和操作达到掌握全局的目的;在分布式控制系统中,多个智能节点连接到CAN总线上,实现各控制系统的信息共享。变速器控制单元(transmission control unit,TCU)是CAN总线网络上的重要节点,对TCU智能节点的研究可以提高和改善动力换挡拖拉机控制系统的特性,因此,开展对拖拉机通信网络和TCU智能节点的研究,对提高动力换挡拖拉机控制系统的可靠性具有重要意义。设计了整车双CAN通信网络拓扑结构,针对动力换挡变速器智能节点进行了电路和输入信号设计,并对其电液系统进行了仿真分析和研究。
1 CAN节点
美国汽车工程学会(SAE)将车内通信网络分为4种类型:A类适合低速环境(<10 kbps),用于提高方便性的应用,如车窗、车门、车灯等设备的控制;B类适合中速环境(10~25 kbps),用于一般信息传递,如车内空调和加热单元控制;C类适合高速环境(125 kbps~1 Mbps),用于实时控制,如动力系统控制;D类适合速度大于1 Mbps的环境,用于多媒体应用和X-by-wire应用等[5]。电控单元之间的通信可以根据通信带宽和通信速度的要求选择不同的通信网络,低速CAN总线和高速CAN总线分别属于B类和C类总线,在汽车领域应用广泛,总线控制技术同样适用于拖拉机等农机,New Holland、Ford等公司已有成熟的产品[6]。
1.1 整车网络结构设计
本文设计了一种双CAN总线网络,采用了并列式和层次式并存的混合通信网络拓扑结构[7-8](图1),低速CAN总线可靠性高,网络速度要求低,用于连接灯光、仪表、远程控制模块和精准作业控制模块等节点;高速CAN总线连接驱动系统、传动系统、电液提升系统、转向系统和制动系统等;2条CAN总线通过VCU(网关)实现整车资源共享并进行数据交换。VCU是整车管理系统的核心,对各种信息进行分析处理并发出指令,协调拖拉机各控制单元及电气设备的工作。双CAN总线网络可以实现拖拉机信息的分层控制,降低总线冲突,协调通信配置,解决拖拉机因线束繁多造成的电气复杂和检修困难等问题[9-11]。
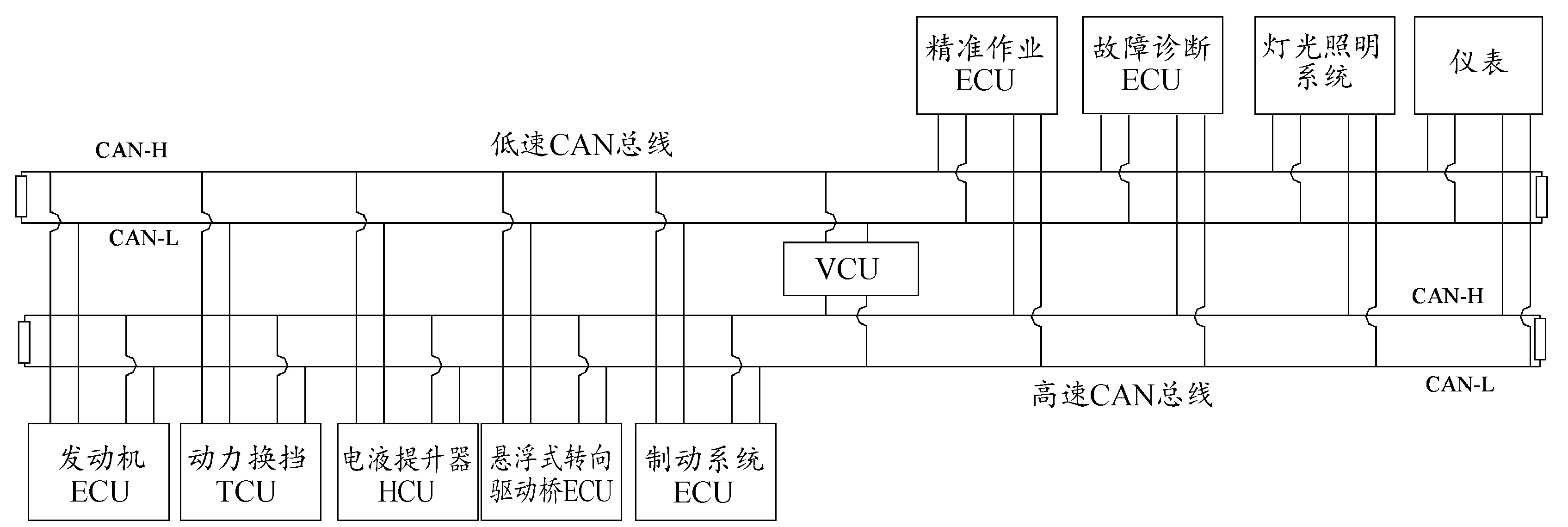
图1 拖拉机整车双CAN通信网络拓扑结构示意图
1.2 节点方案设计
拖拉机整车通信网络是由许多分布在高速、低速总线上的CAN智能节点组成,网关连接2条总线形成一个局域网。图2是VCU与高速CAN总线和低速CAN总线的连接示意图,整车控制器作为网关,处理来自其他智能节点的信息并发出控制信号,通常由MCU、CAN控制器和CAN收发器(驱动器)、光电隔离电路等组成。
1.3 节点电路设计
CAN智能节点MCU选择Freescale的MC9S08DZ60芯片,收发器采用TJA1040,MC9S08DZ60芯片包括集成的CAN控制器、SCI、SPI和TPMx等接口,CAN智能节点电路原理图如图3所示。

图2 整车控制器VCU与总线连接示意图
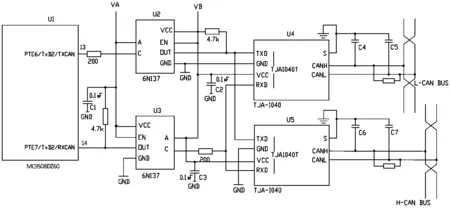
图3 CAN智能节点电路原理图
CAN智能节点电路主要由3部分组成,带CAN控制模块的MC9S08DZ60控制芯片、2个6N137光电隔离电路和2个CAN收发器芯片TJA1040,MC9S08DZ60主要负责内部CAN控制模块的初始化,CAN报文的产生、传输及报错等;CAN控制器和CAN收发器之间增加由6N137构成的光电隔离电路,提高系统的抗干扰能力;TJA1040收发器作为CAN控制模块与CAN总线之间的中继单元,可以驱动CAN总线,使报文在总线上传输,采用2个TJA1040驱动器,可以增强总线容错能力[12],一个节点可以接受2条总线上传来的不同信息,同时一个节点的信息发送到2条总线,实现信息传输备份,从而保证任何一条总线出故障时仍能正常通信。
2 动力换挡电磁阀及其电液控制
2.1 换挡电磁阀原理及其电液控制系统
换挡电磁阀(电液比例换向阀)是离合器调压系统中的核心元件,通过调节控制输入的PWM信号,实现对压力的连续调节,控制离合器的接合与分离,实现对油压的连续控制,其结构如图4所示,调节螺钉决定了预设压力,线圈通电产生磁场,吸引衔铁靠近,球阀左移,压力油向离合器油路充油,电流大小决定了磁场的强弱,决定了进油口打开的程度。
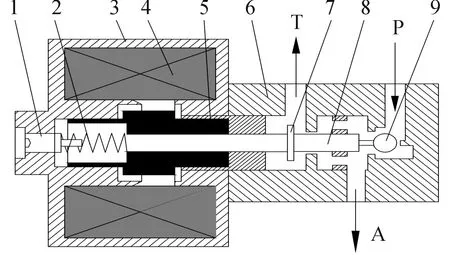
1.调节螺钉; 2.调整弹簧; 3.阀套; 4.线圈; 5.衔铁; 6.阀体; 7.阀挡板; 8.阀芯; 9.进油球阀
拖拉机动力换挡变速器电液控制技术的核心是利用适当的阀来实现对油压的精准控制,上层是控制策略。图5为动力换挡变速器电液控制系统原理图,动力换挡电磁阀采用电液比例换向阀,接同一压力源P1,合适的控制策略以及调速阀和蓄能器的合理设置,可以形成合适的换挡点,以减小液压冲击和防止动力中断。
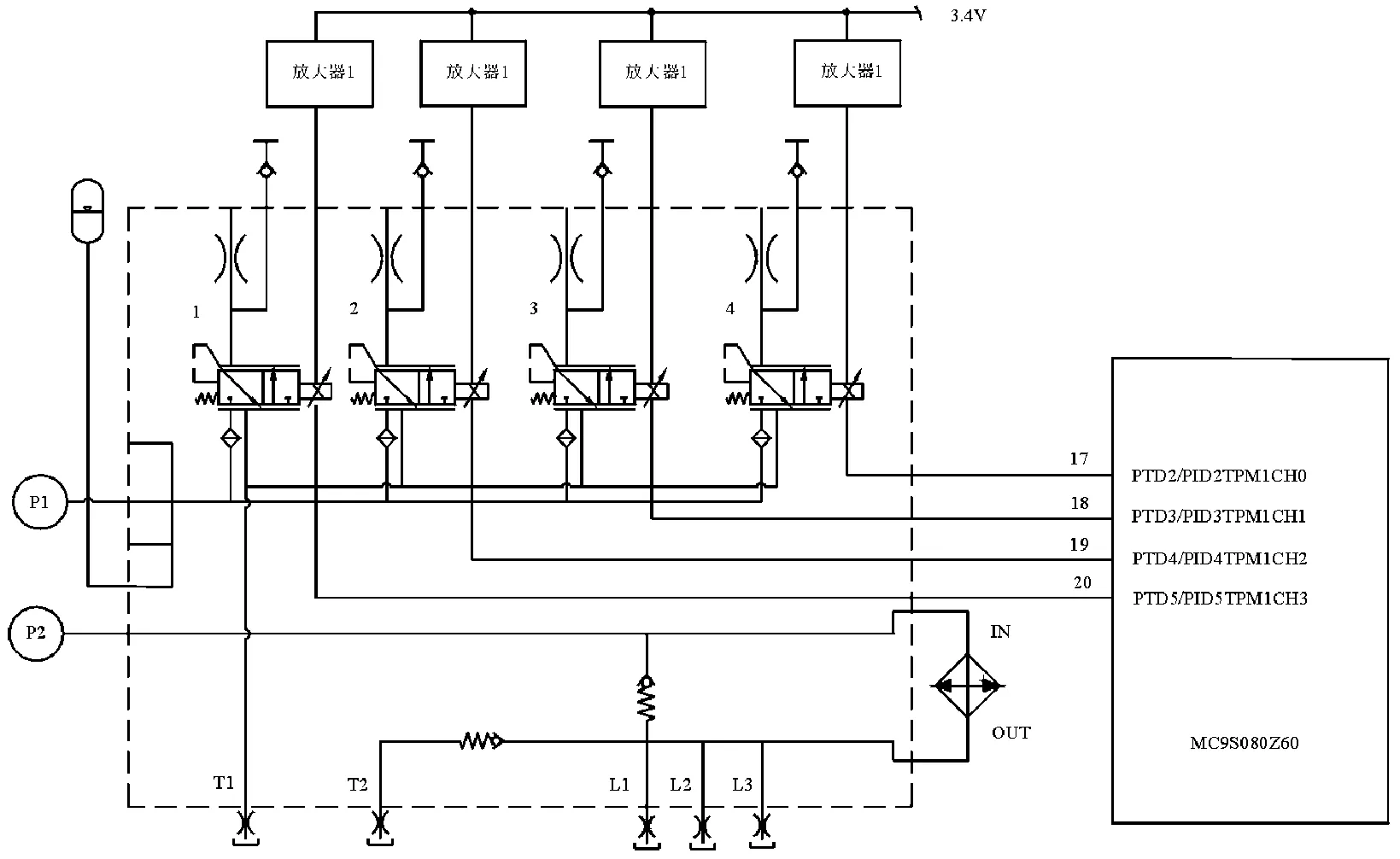
图5 动力换挡变速器电液控制系统原理图
2.2 控制策略
输入信号的形式决定了换挡离合器的油压特性,图6所示为理想的换挡离合器油压特性曲线,以L挡换M挡为例,在t0时刻发出换挡信号时,离合器电磁阀迅速打开到一定程度,在t1时刻达到压力pcp,此压力可推动活塞开始接触摩擦片,压力继续增加,接合离合器开始传递转矩,分离离合器由接合处于滑磨阶段,t2时刻,分离离合器完全分离,接合离合器油压继续升高至pcf,达到系统压力pms。
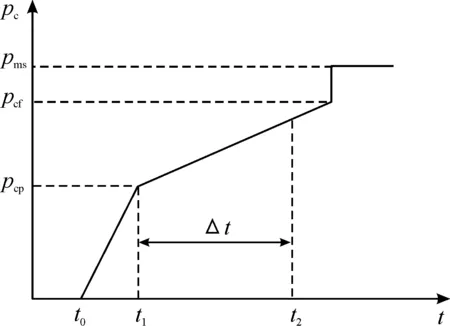
图6 换挡离合器油压特性曲线
根据理想的换挡离合器油压接合特性建立了换挡电磁阀分段函数输入信号(图7),把离合器油缸活塞位移作为反馈信号,建立闭环控制系统,然后对系统进行仿真。
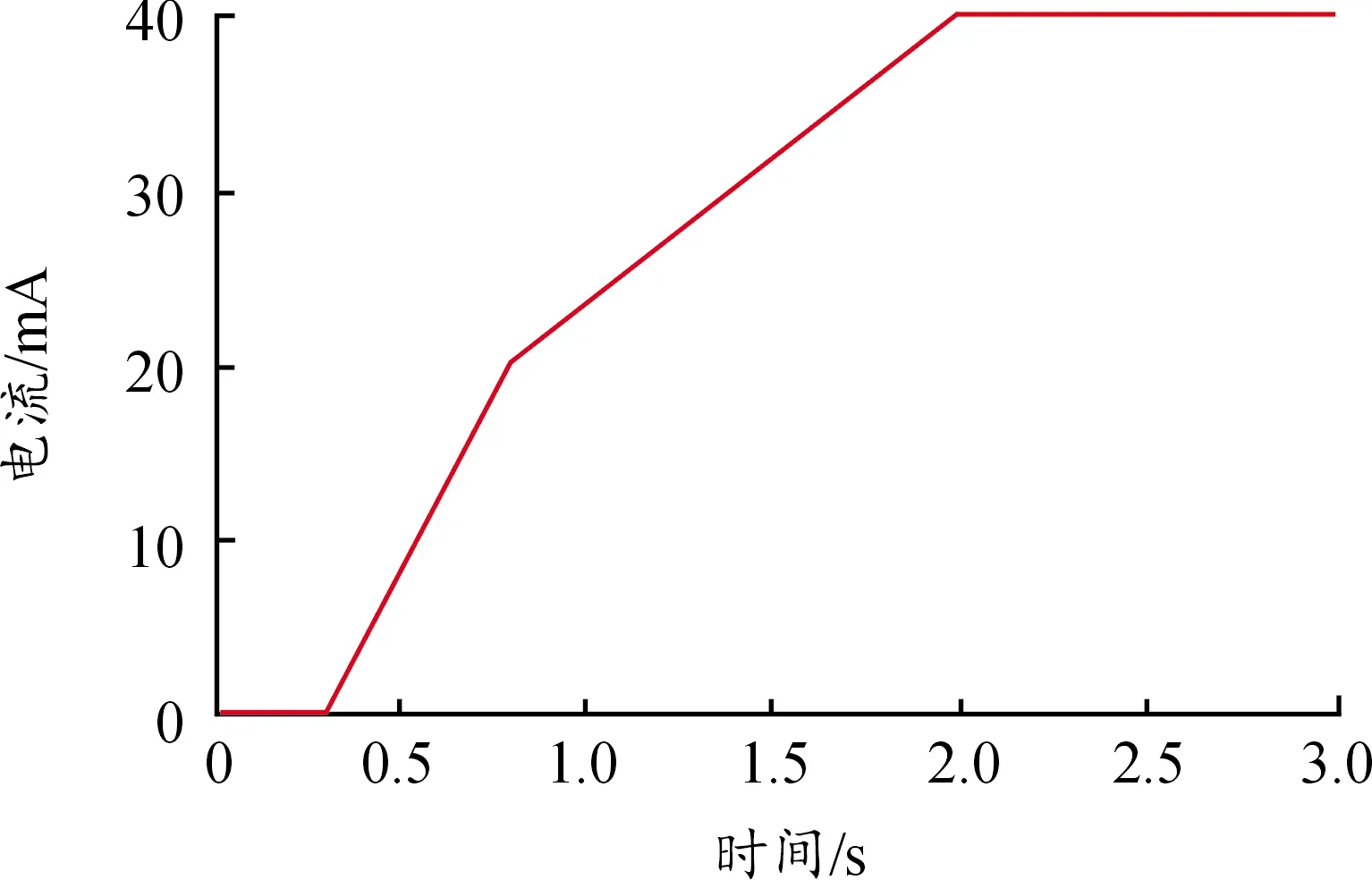
图7 换挡电磁阀输入信号曲线
变速器控制系统TCU会根据输入信号(车速、牵引力、滑移率等)按一定的控制策略确定合适的换挡时刻,控制策略有传统控制和现代智能控制,现代智能控制又包括模糊换挡控制、神经网络换挡控制、专家系统等。
3 建模与仿真分析
3.1 模型的建立
AMESim(advanced modeling environment for simulation of engineering system)是一个多学科领域仿真平台,可进行机电液复杂控制系统的仿真分析[13-14]。根据动力换挡变速器电液控制原理图,在AMESim中建立其模型(图8),包括4组动力换挡电磁阀和湿式离合器,此模型检验换挡电磁阀开关特性、湿式离合器的响应特性和换挡过程压力响应特性。
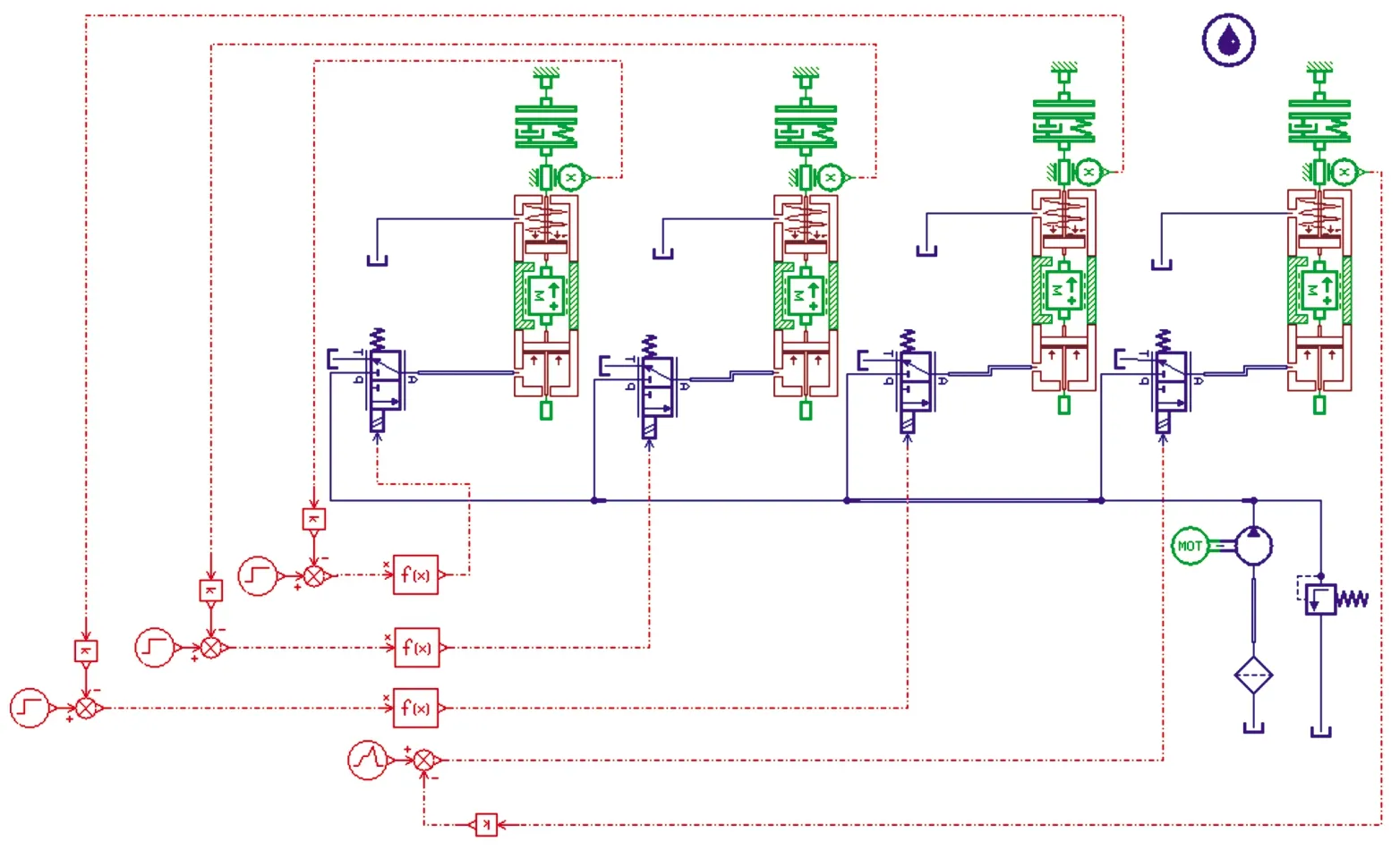
图8 动力换挡变速器电液控制AMESim模型示意图
为了进一步实现离合器柔顺换挡,稳定进入离合器的流量,在换挡电磁阀与离合器油缸之间增加调速阀,以其中的一组离合器为例,建立了AMESim模型(图9),2个模型在仿真时假设液压油为理想油液,不考虑管道阻力和液压缸的死区特性,并忽略系统泄漏和发热[15]。
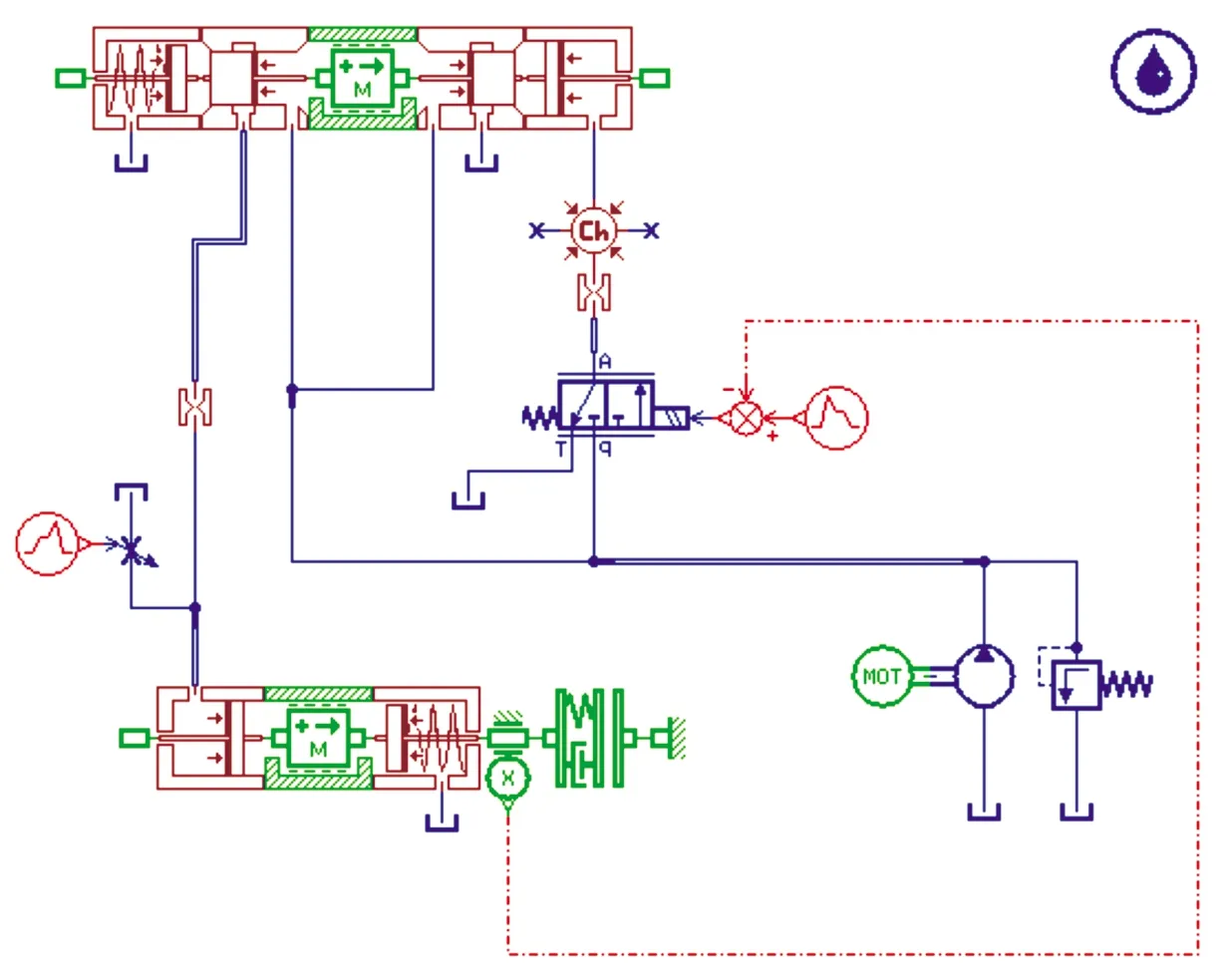
图9 动力换挡湿式离合器AMESim模型示意图
3.2 仿真结果分析
评价换挡品质的指标通常有液压冲击度、滑磨功、输出轴转矩等,良好的换挡品质要求换挡迅速、平稳、无冲击,且对动力传递影响小,尽量使动力不中断[16]。冲击度表示车辆纵向加速度对时间的导数,其大小主要受离合器油缸内油压变化曲线的影响,离合器摩擦片之间的总间隙为5~8 mm[17],活塞推动离合器片移动,因此,活塞行程的变化能反映离合器接合和分离过程。
已有大量文献对换挡过程的影响因素进行了分析和仿真,如系统主油压、电磁力、节流孔直径、阀芯质量等因素对离合器油压特性的影响,得出了各参数最佳数值范围,对提高换挡品质有很大的帮助[19-22]。本文不考虑调速阀、离合器等部件的结构参数变化,研究换挡重叠时间对换挡离合器液压冲击的影响。
对系统模型仿真了一次换挡过程,对离合器油缸活塞位移进行考察,仿真结果如图10(a),其中实线表示离合器1油缸活塞的位移,虚线表示离合器2 油缸活塞的位移,在0.3 s时收到换挡信号,活塞在压力油的作用下开始发出动作,换挡电磁阀在0.4 s时开始泄油,即离合器2开始分离,泄油时间持续1.0 s,而离合器1在2.0 s时完全结合,因此,换挡重叠时间为1.0 s。
液压冲击即换挡过程引起的系统压力波动,可以将离合器1和2的压力叠加视为系统压力波动,将重叠时间设为0.3 s,分别仿真0.3、0.4、0.5 s开始泄压的压力冲击,用AMEplot加载每次仿真的液压冲击曲线(图10(b)),离合器2油缸在0.3 s开始泄压,液压冲击达2.48 MPa,离合器2油缸在0.5 s开始泄压,液压冲击降到1.09 MPa,此情况下,车辆动力不会中断,但有一定的降低,而在0.4 s开始泄压,压力波动为0.63 MPa,既没有过大的压力冲击,又不会影响车辆的动力性能。
上一步的仿真确定了离合器2油缸的最佳泄压时刻为0.4 s,进一步考察换挡重叠时间不同产生的液压冲击。仿真了离合器2油缸在0.4 s开始泄压,泄压时间为0.2、0.3、0.4和0.5 s的液压冲击情况(图10(c)),换挡重叠时间为0.4 s时,压力波动最小为0.48 MPa。通过以上仿真得出,系统的换挡过程离合器2油缸在0.4 s开始泄压,泄压时间持续0.4 s,系统的压力冲击达到最小。

图10 换挡过程仿真分析曲线
4 结论
1) 文中设计的双CAN总线的优势在于:可以实现拖拉机信息的分层控制、降低总线冲突、实现总线容错能力等,是未来拖拉机通信网络的发展方向之一。
2) 硬件电路特点是在CAN控制器和CAN收发器之间增加由6N137构成的光电隔离电路,减少电磁干扰,采用2个TJA1040驱动器可以增强总线容错能力,一个节点可以接受2条总线传来的不同信息,同时一个节点的信息发送到2条总线,实现信息备份,从而保证任何一条总线出现故障时仍能正常通信。
3) 设计了换挡电磁阀输入信号,仿真表明:离合器油压特性曲线接近理想状况。对换挡重叠时间进行仿真,结果显示离合器泄油时刻为0.4 s且换挡重叠时间为0.4 s时,系统受到的液压冲击最小为0.48 MPa,对车辆动力性能影响很小。
仿真结果可以为拖拉机智能换挡控制策略的建立提供参考,不足之处在于只从液压冲击对换挡品质进行了评价,由于离合器接合过程存在滑磨损失,产生的热量会导致摩擦片温度升高、表面磨损等问题,进一步的换挡品质研究可以采用离合器摩擦片滑磨功及温度等影响因素进行评价。