AMB转子系统动力学分析与控制研究
2022-03-23李山,卿豪,杨奕,李耀
李 山,卿 豪,杨 奕,李 耀
(1.重庆理工大学, 重庆 400054;2.重庆市能源互联网工程技术研究中心, 重庆 400054)
AMB作为一种新型的使用电磁力提供承载力的高性能轴承,与传统轴承相比具有无接触摩擦、无油污、寿命长等优点。无接触的优点使得它在高速电机中得到广泛应用。此外,它在船舶、航空发动机涡轮泵、定位系统、飞轮储能系统、航天器集成电源等方面也有广泛的应用[1-3]。AMB系统主要由电磁执行器、转子、位移传感器、控制单元和功率放大器构成,磁悬浮轴承组成及基本控制回路见图1。由位移传感器检测转子实时位移信号反馈至控制器中,产生的电流信号通过功放形成相应的线圈电流作用于磁轴承线圈,进而在磁铁铁心中产生磁场,得到所需的电磁力[4]。
关于AMB控制系统的一般研究方法是建立数学模型,确定控制算法,研究控制策略。由于精确的数学模型能更好地体现磁轴承特性,早期数学模型一般采用经典线性化模型。随着更高的控制精度要求和多元化的应用场景需求,研究者建立了不同的数学模型。姜豪等[5]对运动平台上的磁轴承-转子系统进行了动力学建模,考虑大幅运动等非线性因素,通过实验验证了模型的可行性。何海婷等[6]研究了基于BP神经网络的飞轮储能系统的非线性模型,更为准确地描述了AMB非线性特性,但其复杂的非线性模型为后续控制带来了艰巨挑战。
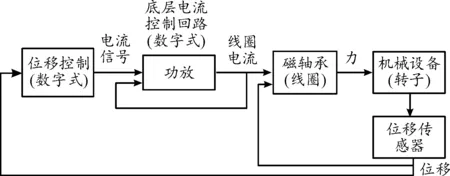
图1 磁悬浮轴承组成及基本控制回路结构框图
PID作为AMB中最常见的控制算法,因设计的物理概念清晰而具有高度实用性,很多学者对PID改进算法进行了研究。不完全微分PID算法[7]中,由于滤波器的加入使得其能有效抵抗噪音干扰。姜豪等[8]基于扩展卡尔曼滤波提出了改进PID算法,有效解决了信号噪声对控制精度的影响问题。郝建胜等[9]提出了基于BP神经网络的PID算法,其适应能力和动态效果较不完全微分PID算法均有改善。
值得注意的是,AMB系统本身并不属于单纯的控制学问题,而是涉及转子动力学、机械学、测试技术等多学科技术。线圈电流在磁场建立的过程中不能突变,需要一定的建立时间,克服转子重力的瞬间,须建立较大磁场,但传统PID控制下的采样速度与磁场建立速度不匹配,且磁轴承的气隙极小,很可能造成超调问题。对于磁轴承这一特殊对象,超调意味着转子过冲,过冲的最严重后果是转子被上端线圈吸死,线圈电流保持极大值,造成控制电路发热甚至烧毁硬件。轻微的过冲会造成转子碰壁,碰壁后便引入不确定力作用影响,造成转子的不规律振动,对转子控制有较大影响。此过程一般发生于转子静态悬浮阶段,需减缓转子在第一次起浮时的过冲碰壁现象,不引入外界不确定力的作用,以更好地实现稳定悬浮。
为减缓转子在第一次起浮时存在的过冲碰壁情况,减缓过冲主要有2种方式:① 对于上端轴承线圈的电流,适时控制减缓其上升速度;② 对于下端线圈及时介入,产生反作用力限制过冲速度。上端电流的减缓和下端线圈的介入均需要一定预判条件,不能盲目施加,这一研究涉及转子动力学分析。AMB系统虽然呈现复杂的非线性特性,但在机械结构固定的前提下,转子在这一非线性环境中的运动学遵循相同的规律。基于以上分析,提出一种基于动力学分析的AMB系统控制策略。对转子进行理论动力学分析,为保证动力学分析的正确性,将实测与理论动力学做对比分析实验;将修正后的动力学理论分析应用于控制研究理论推导,通过仿真和实验验证控制理论的可行性。
1 模型解析
磁轴承-转子系统的部分结构如图2所示,A、B为两端的径向磁轴承。假设转子质量分布均匀,C点为AMB转子的几何中心或者质心,以此建立相关坐标系[10]。着重研究径向4自由度,轴向运动可视为与径向完全解耦(线性讨论范围),能独立进行处理,故轴向轴承及相关元件被省略。
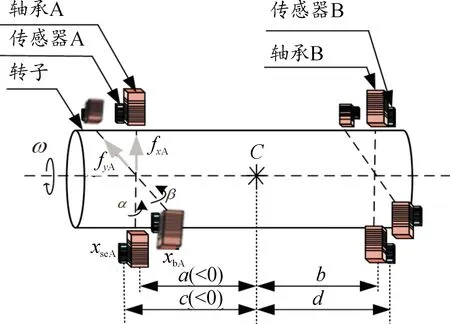
图2 磁悬浮轴承-转子系统结构示意图
以八极式主动磁悬浮轴承(active radial magnetic bearing,ARMB)为研究对象,表1为其基本结构参数。图3为隔开极式八极主动磁轴承实验样机结构示意图,四对极分开的磁极结构有利于减少磁极间的漏磁,方便控制。一对极定转子的磁路等效模型示意图如图4所示,其磁极极化顺序为N-S-S-N。
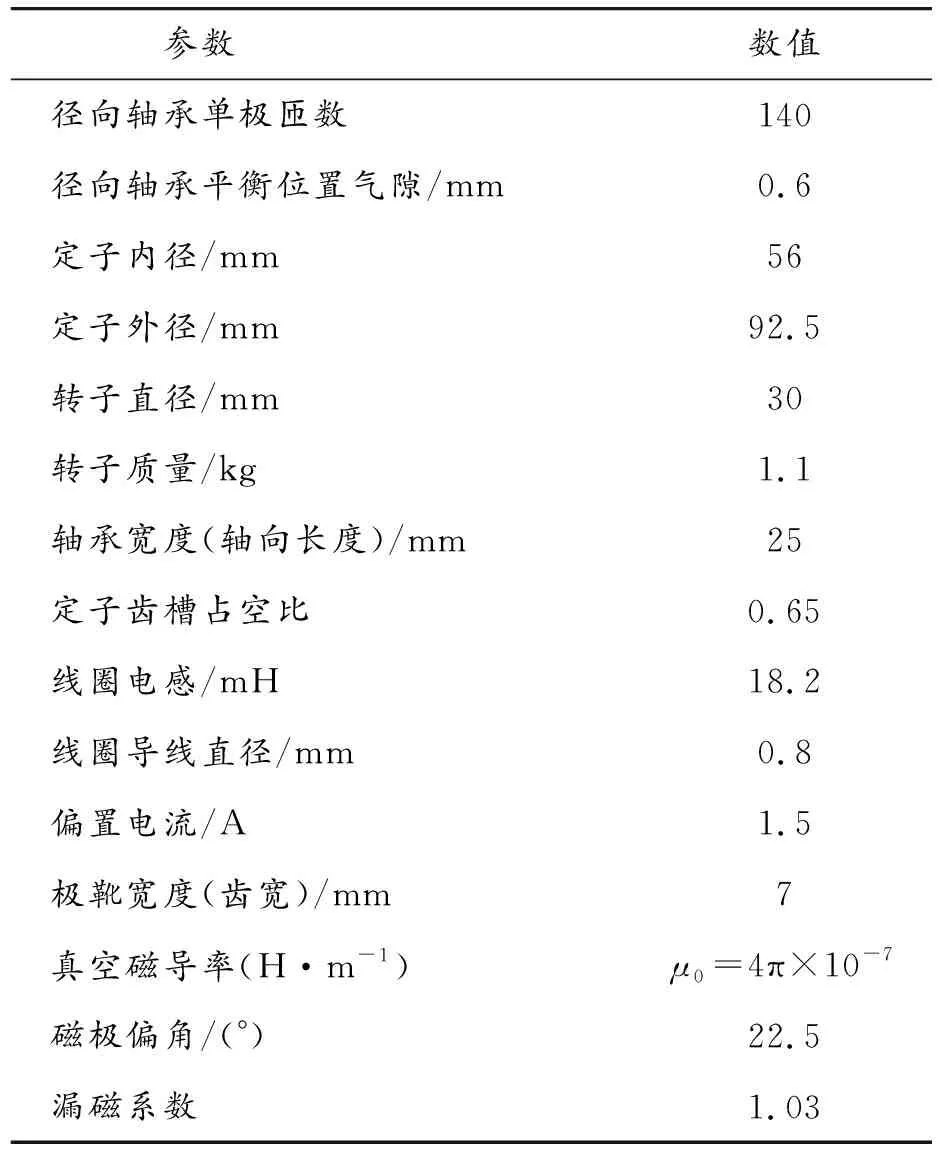
表1 ARMB基本结构参数
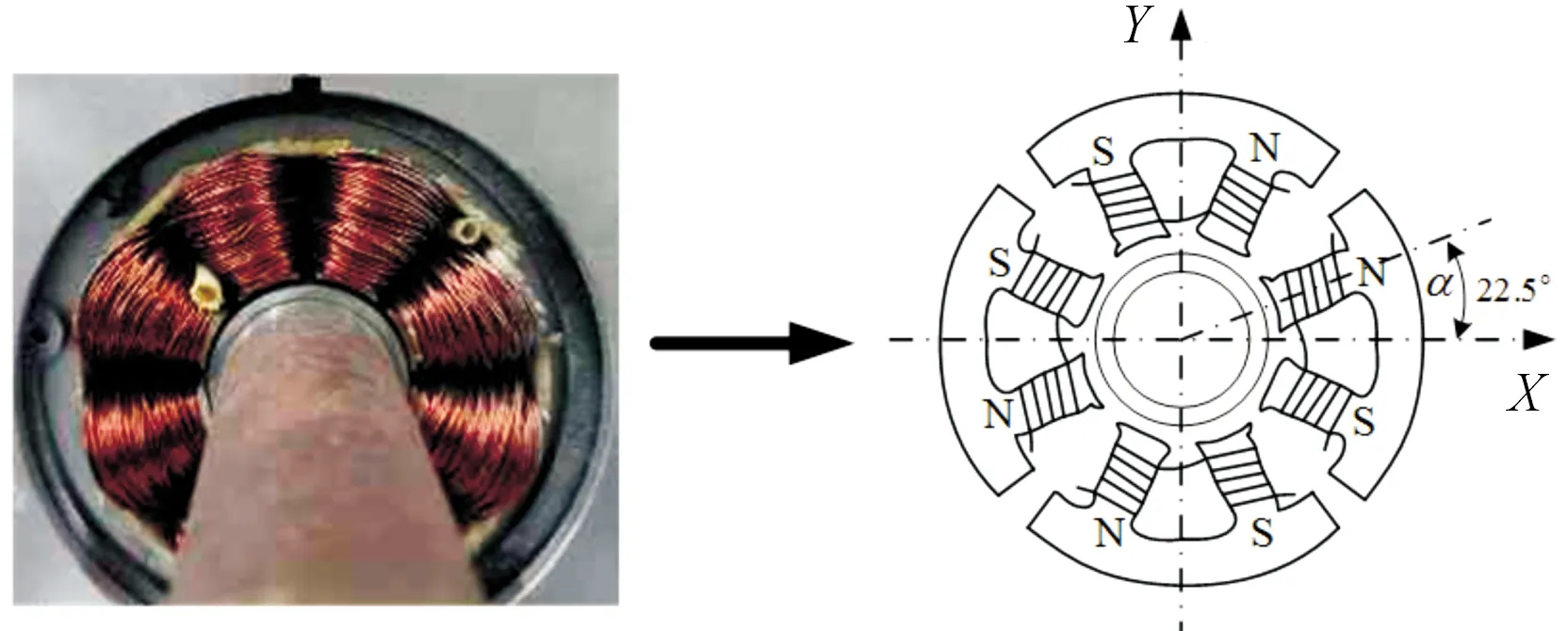
图3 隔开极式八极主动磁轴承实验样机机构示意图
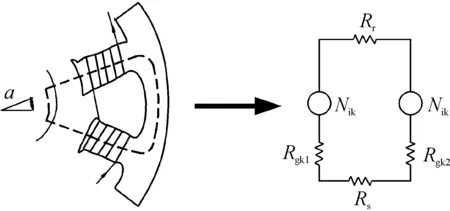
图4 一对极定转子的磁路等效模型示意图
忽略铁心磁阻,考虑漏磁影响,根据等效磁路可得到
(1)
式中:ik为第k个磁极上的绕组电流;Rs、Rr为定子、转子磁阻;N为线圈匝数;σ为漏磁系数。
从转子12点钟位置按顺时针方向排列,第2个磁极所对气隙磁阻为Rgk1,其余气隙磁阻按照顺时针排序方式分别为Rgk2,Rgk3,…,Rgk8。
气隙磁阻计算式为
(2)
式中:lg为定子磁极对应的气隙长度。
气隙磁密计算式为
(3)
式中:As为定子径向面积;S为定子内径;lef为铁心有效长度;β为定子齿槽占空比;np为定子极数。
定子径向面积计算式为
(4)
式中:d为轴承内径;b为轴承宽度。
基于场能理论,径向磁铁的力fx与线圈电流i平方成正比关系,与位移平方成反比关系,呈现非线性特性。但在某些工作点附近,作用力可以线性化:
fx(x,i)=kii-ksx
(5)
(6)
式中:μ0为真空磁导率;N为磁轴承单极匝数;i1为磁轴承偏置电流;α为磁极偏角。
根据表1的径向磁悬浮轴承相关参数,计算得到
f=24.46i-61.16x
(7)
不同电流下,转子所受电磁力f与其距离位移传感器的距离x的关系曲线如图5所示。当电流i一定时,转子距位移传感器的距离x与电磁力f成反比。即转子距离传感器/线圈越近,受到的电磁力越大。
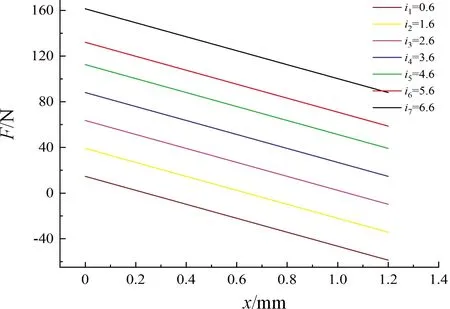
图5 不同电流下f-x关系曲线
2 主动径向磁轴承运动学分析
2.1 磁轴承转子受力分析
磁轴承转子在静态悬浮过程中不考虑外界扰动力影响,故转子作用力为自身重力和电磁力。上文对轴承电磁力进行了初步分析,下面对其做进一步分析。
PWM调制方式下,由于功放电路设计原因,本文方法中占空比D与电流呈反相关。通过实测得占空比与电流关系曲线(图6),通过拟合得到二者的关系表达式:
i=-0.007 6D+5.205 6
(8)
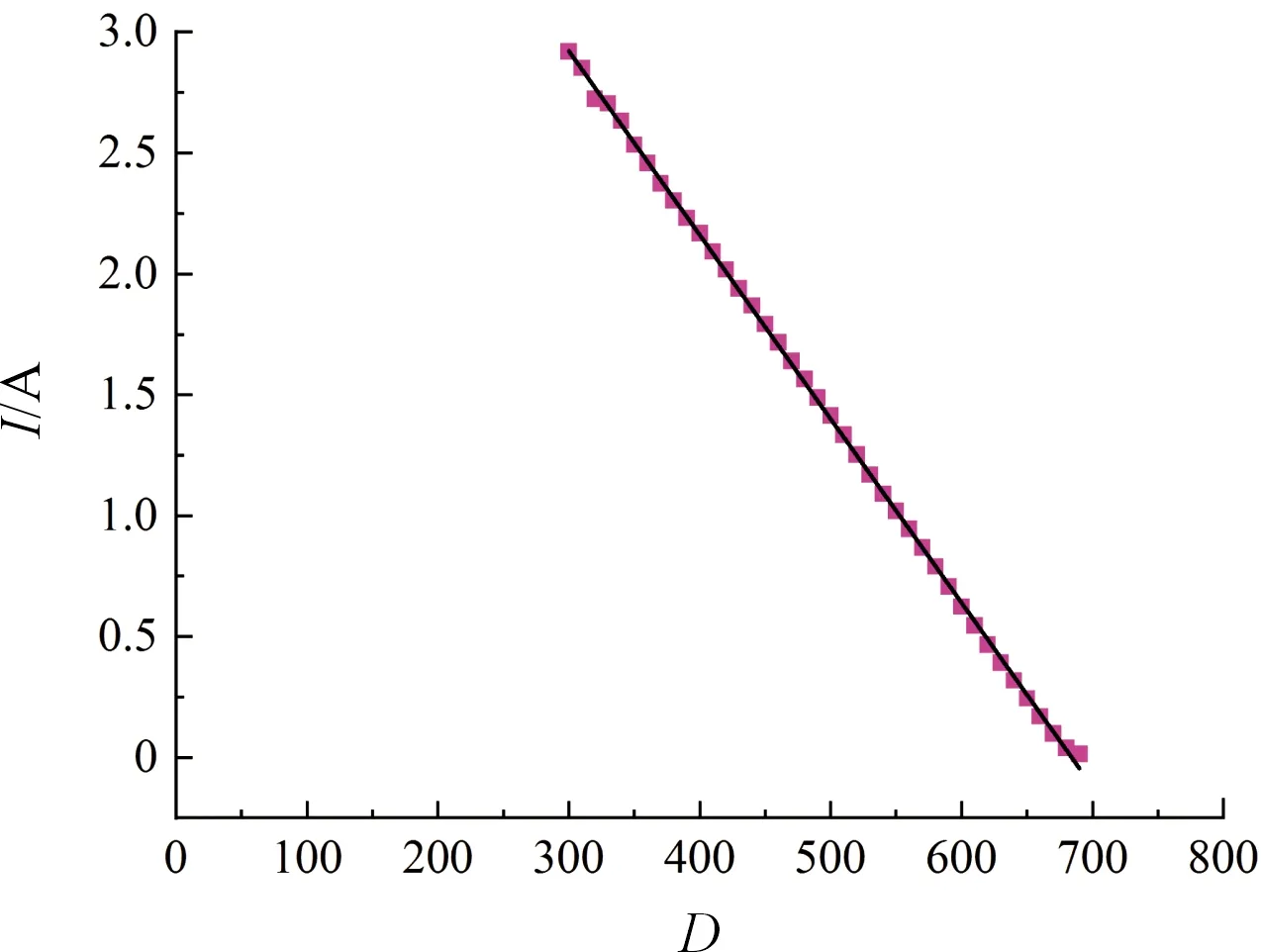
图6 D-i关系曲线
将式(8)代入式(7),得电磁力与上端位移传感器以及占空比关系表达式:
f(x,D)=127.33-61.16x-0.186D
(9)
已知占空比D的取值范围为0~800,位移x的取值范围为0~1.2 mm,得到如图7的三维图。S1轴表示转子上端与上端位移传感器距离x(单位mm),D轴表示占空比,F轴表示电磁力f(单位N)。
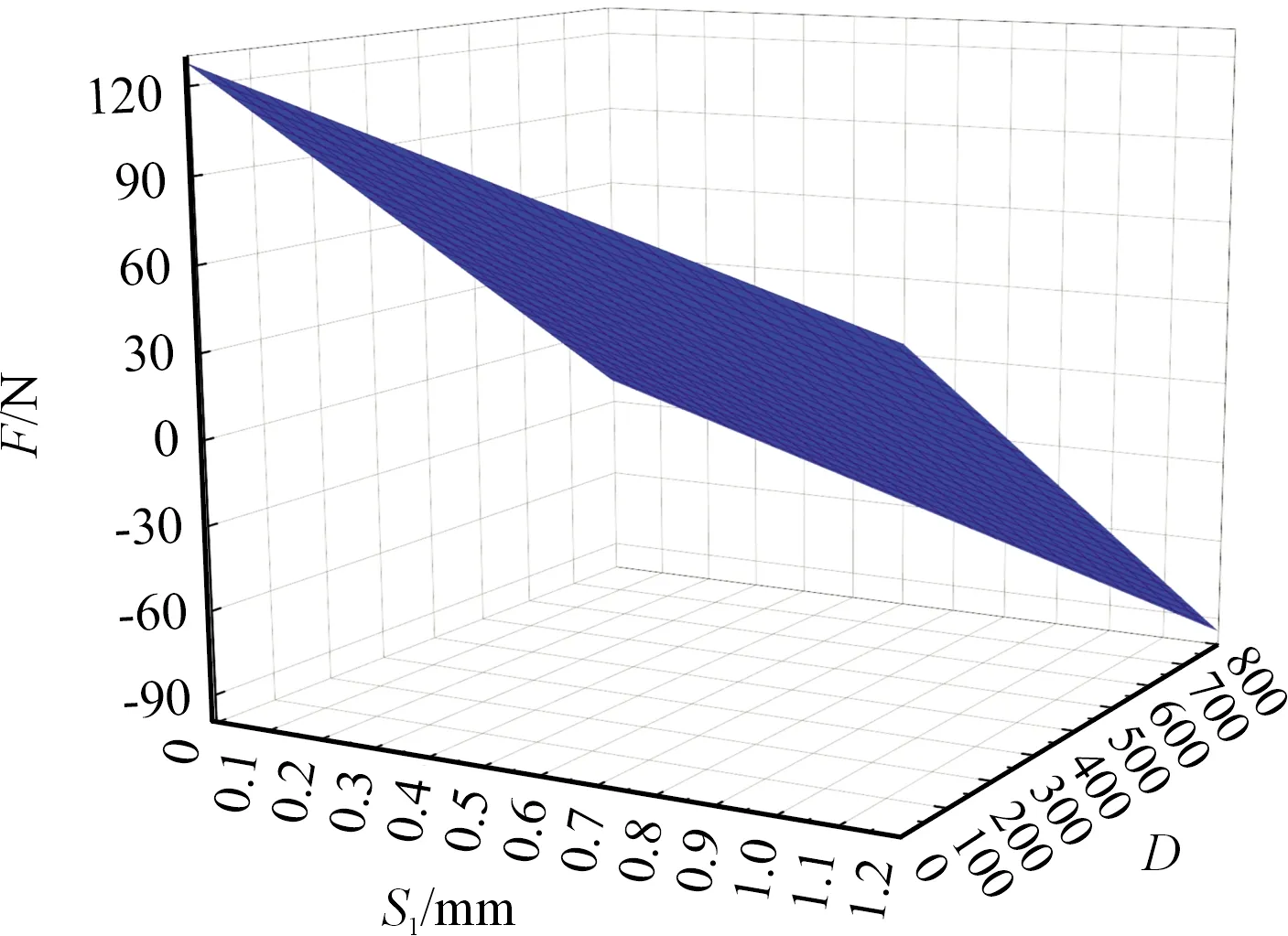
图7 f-i-D关系图
2.2 磁轴承转子动力学分析
在磁轴承的初步动力学分析过程中不考虑复杂的控制,对上端轴承线圈通入固定电流(即固定占空比D)。在磁力的作用下转子被吸到顶端,安装在转子四周的位移传感器将实时数据通过串口输出到PC端。为更直观地描绘转子运动轨迹,将传感器示数转换成转子轴心坐标。
如图8所示,R1为转子实际运动空间圆圆心;R2为转子径向截面圆心,半径为15 mm;s1、s3分别为上端和左端位移传感器示数。
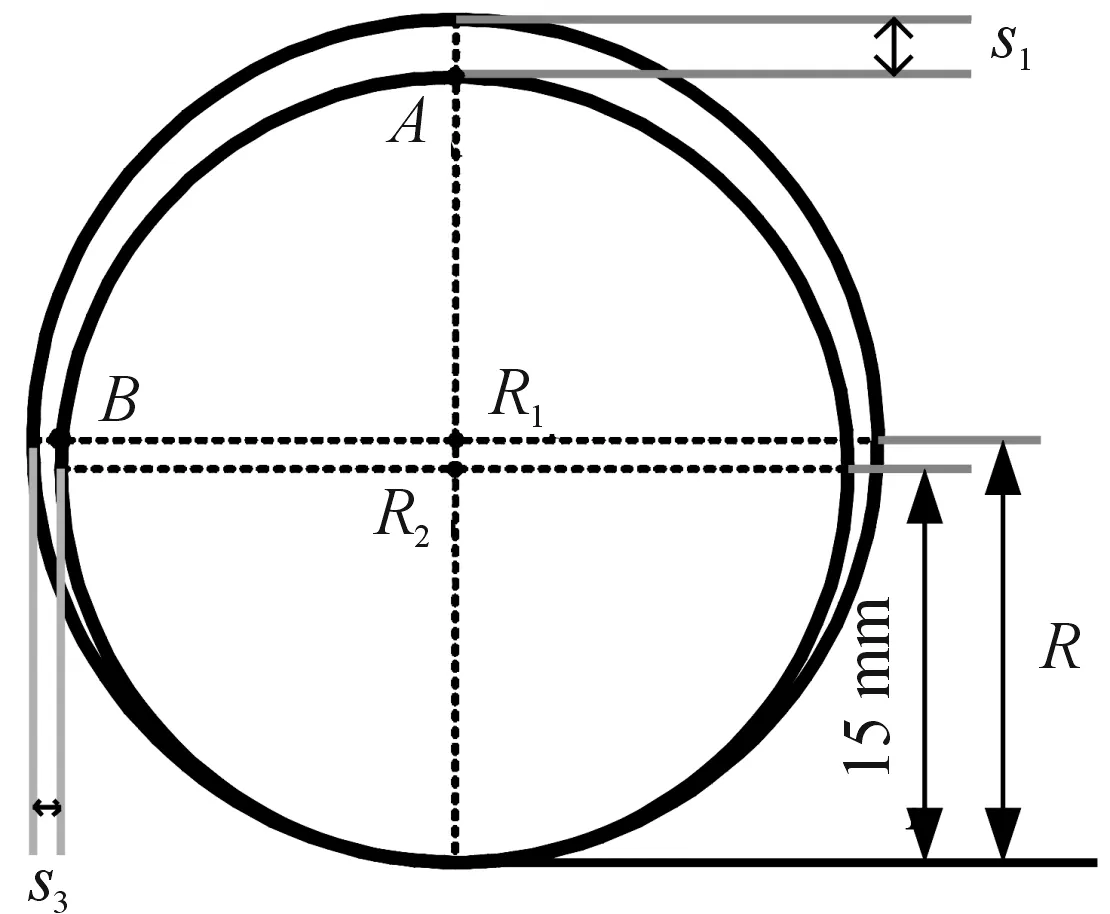
图8 转子轴心推算模型示意图
为测得基于传感器示数下空间圆的半径,进行多次吸合实验,筛选后取平均值,选取传感器示数下气隙为1.17 mm(尺寸气隙为1.2 mm),空间圆的半径R为15.59 mm。建立以空间圆圆心为原点、气隙长度为直径的圆形坐标系,忽略转子质量分布不均衡问题,将转子等效为其轴心的点。
下面推导转子轴心坐标。令点A和B的坐标分别为(0,y1)、(x2,0),其中y1=15.59-s1/100,x2=s3/100-15.59。
转子轴心坐标(x0,y0)可由表达式(10)推导。
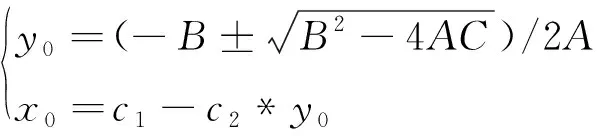
(10)
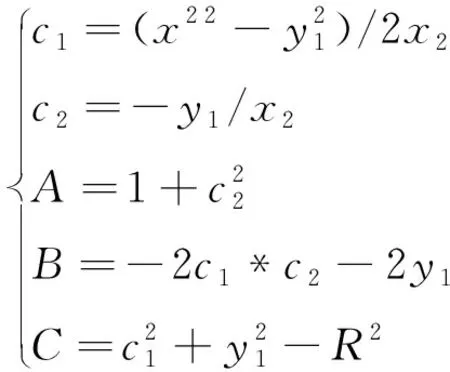
(11)
根据吸合实验数据,通过位移传感器数据计算出轴心坐标,并绘制不同占空比下转子被吸到顶端的轴心轨迹图,见图9。当占空比D大于245时,磁轴承上端线圈无法克服转子自身较大的惯性力,故保持静止状态。
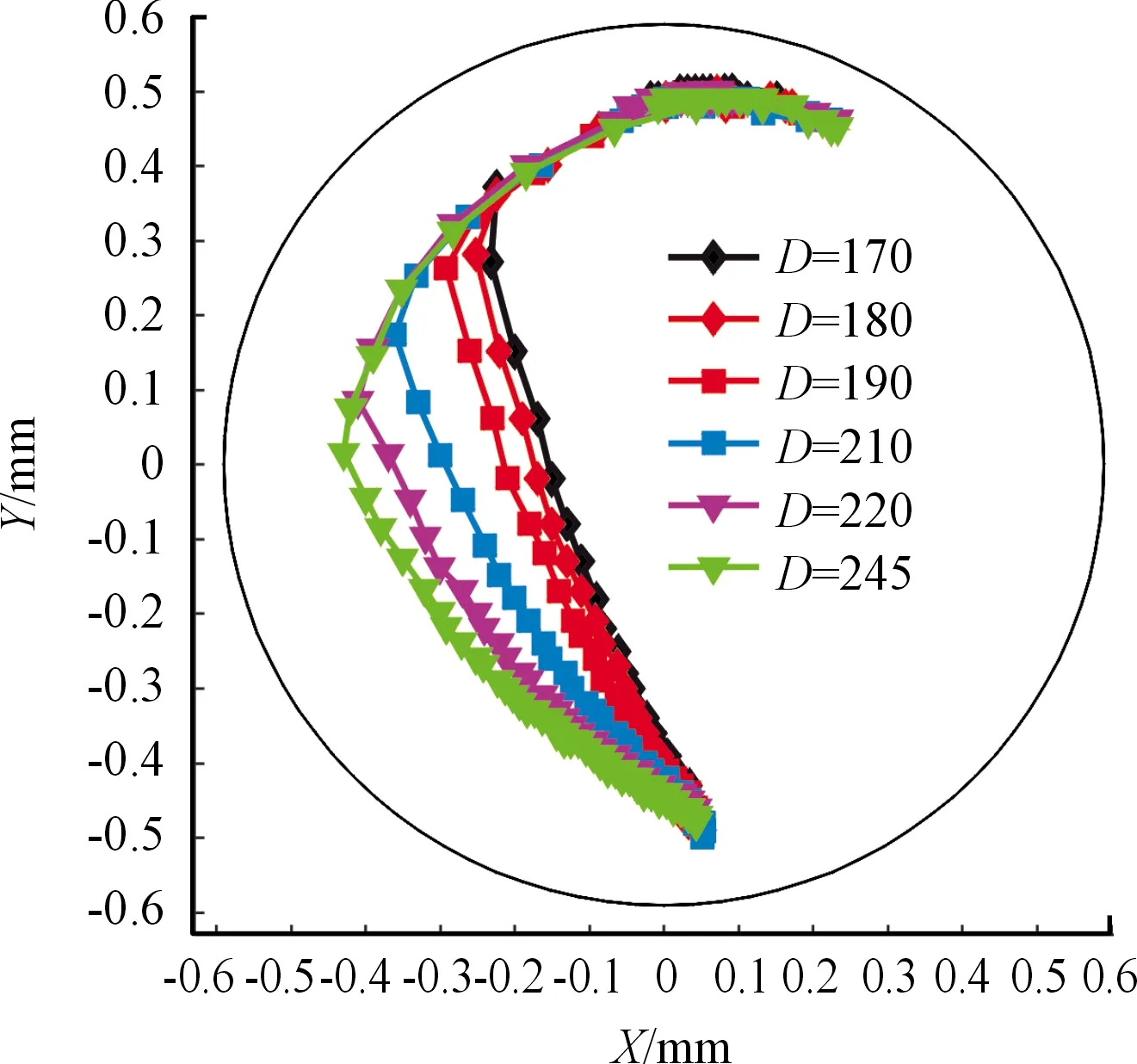
图9 轴承上端给力轨迹
已知AD芯片单通道采样时间为0.1 ms,对前后端8个通道进行采样需0.8 ms。此外,PWM频率为10 kHz,故进行一次PID调节的时间设置为1 ms。从而得知,PC端输入数据时间间隔为1 ms。据此,对采集的数据进行计算分析得到转子实际运动相关量,包括加速度a、速度v、位移s。D=170时的吸合实验转子加速度曲线见图10。
从图10可以看出,转子加速度在达到32 m/s2后急剧下降并反向,此过程是由转子碰壁造成的。由于碰壁后转子受力情况无法分析,故后续分析时均不考虑碰壁后数据情况。
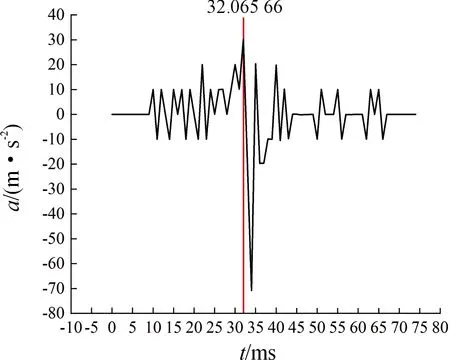
图10 D=170时实测加速度曲线
理论动力学推导以时间间隔1 ms、占空比170为前提。轴承的电磁力虽产生于气隙与转子边缘之间,应以转子上端最远处为推导点,但转子轴心在竖直方向的运动情况与转子上端相同,故可将转子的运动分析看做是在转子轴心处、受力按实际受力分析的过程。
将D=170代入式(9),得到:
f(x,170)=95.4-61.16x
(12)
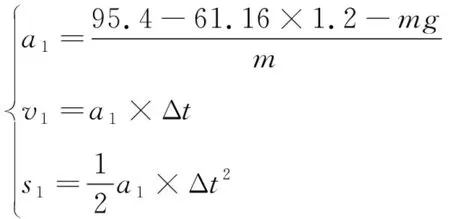
假设在1 ms内转子的加速度不变,间隔时间为Δt,转子质量为m;0 ms时,转子运动量为a0,v0、s0均为0,0~1 ms内转子运动量为a1,v1,s1并以此类推,则0~1 ms内,由牛顿第二定律可知
(13)
此过程中,转子并未运动,上端位传数据为1.2 mm,则有:
(14)
(n-1)~nms内:

(15)
对式(15)进行迭代运算,得到轴承在定占空比D=170时,转子加速度的理论推导数据。通过散点数据拟合得到图11中的理论曲线,同时将实测曲线碰壁后以及未克服惯性力前的数据舍弃,与理论数据同次拟合,得到图11中的实测曲线。转子速度与位移的理论与实测对比曲线分别见图12、13。
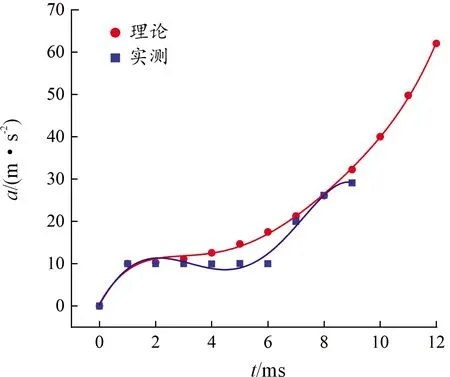
图11 加速度曲线
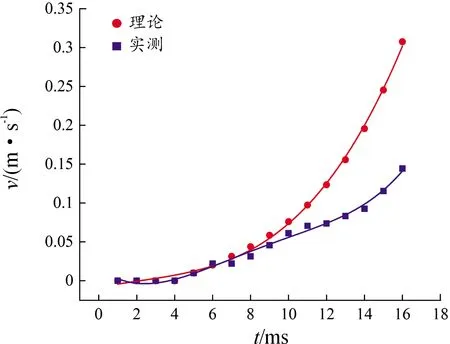
图12 速度曲线
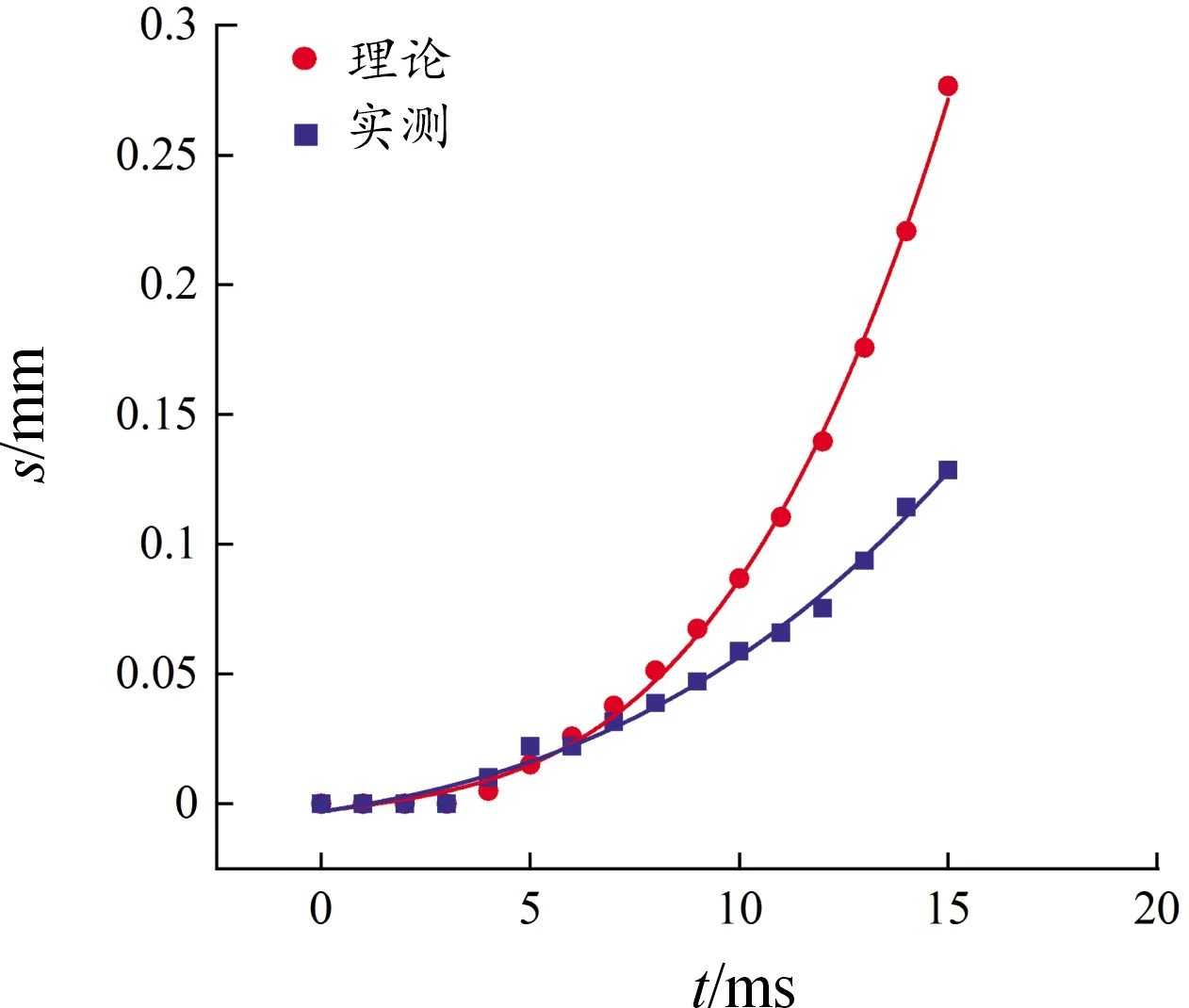
图13 位移曲线
可以看出,理论与实测曲线趋势一致,但存在一定偏差,这一方面是实测运动量数据未考虑水平运动分量的影响;另一方面,从轴承上端给力轨迹可以看出,上端轴承作用时,轴心轨迹曲线偏左,可能是由于磁场分布导致两极电磁力的合力偏左,使得轴承受到的电磁力并非在竖直方向上。如图14,理想状态下,上端两极电磁力fa、fb产生的合力为F1,处于竖直方向,但由于加工等问题,两极电磁力实际为fc、fd,产生的电磁合力为F2,与理论电磁力F1之间存在电磁力偏移角Δα。
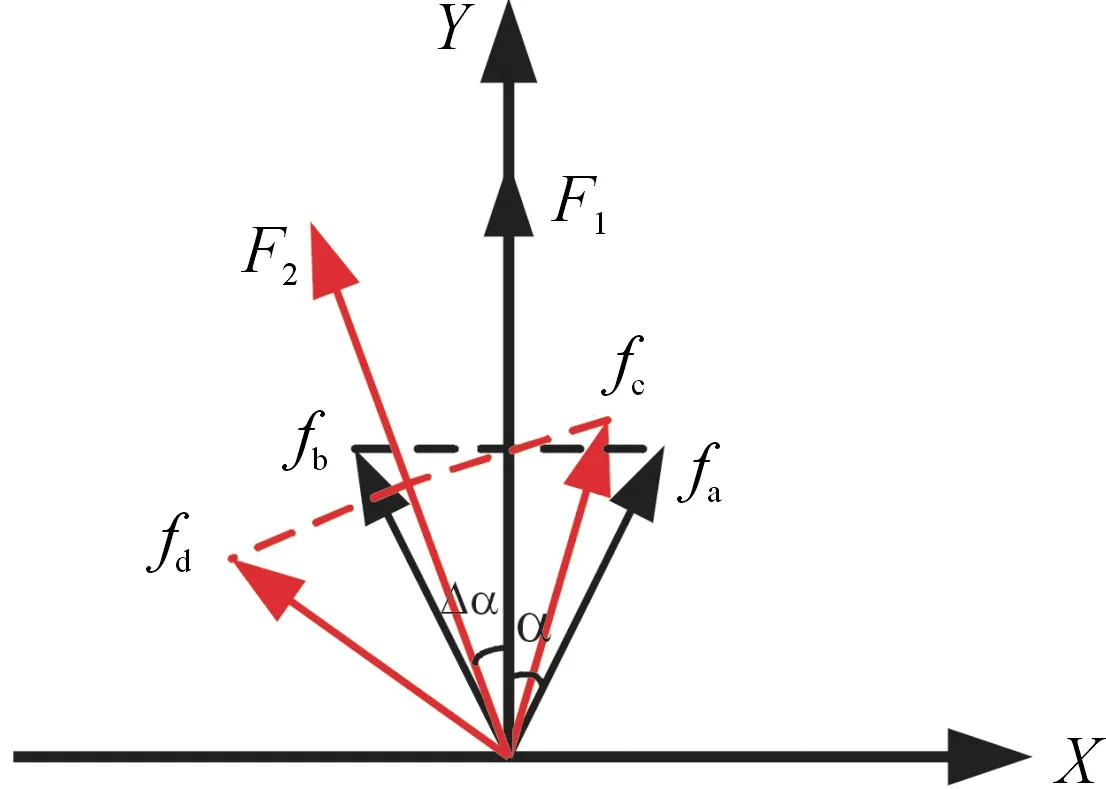
图14 电磁力偏移示意图
从图14可知,F2在竖直方向的分量为F2cos(Δα),水平方向的分量为F2sin(Δα)。
对于水平方向,轴承仅受F2sin(Δα)作用,水平加速度为
(16)
在静止状态下,根据实测曲线取15个控制周期(即15 ms),可得到轴承在水平方向的位移为sx=2.25sinΔα。从图8可知,轴承在水平方向可移动的最大距离应小于0.6 mm,故2.25sinΔα<0.6,从而Δα<15°。
对于竖直方向,轴承受到F2cos(Δα)和重力共同作用,竖直方向加速度为
(17)
静止状态下,ay=20cosΔα-11。根据图11的实测加速度曲线可知,竖直方向上由于惯性力的作用,ay应达到10 m/s2左右才能克服轴承的较大惯性力,故Δα≈0。综上,Δα值取0°~15°。
取Δα=0°,Δα=8°,Δα=15°,对理论运动量曲线进行修正,同时将水平方向运动分量合成至实测运动曲线中对实测曲线进行修正。修正后的运动量曲线如图15~17所示。
从修正曲线可以看出,当Δα=8°时,理论与实测运动曲线更趋近。
通过以上动力学分析发现:研究证明了理论动力学分析的正确性,可将其运用至后续控制理论推导;分析理论推导与实际动力学分析存在偏差的原因,对理论动力学进行修正,使其具有更贴近实际的推导价值。
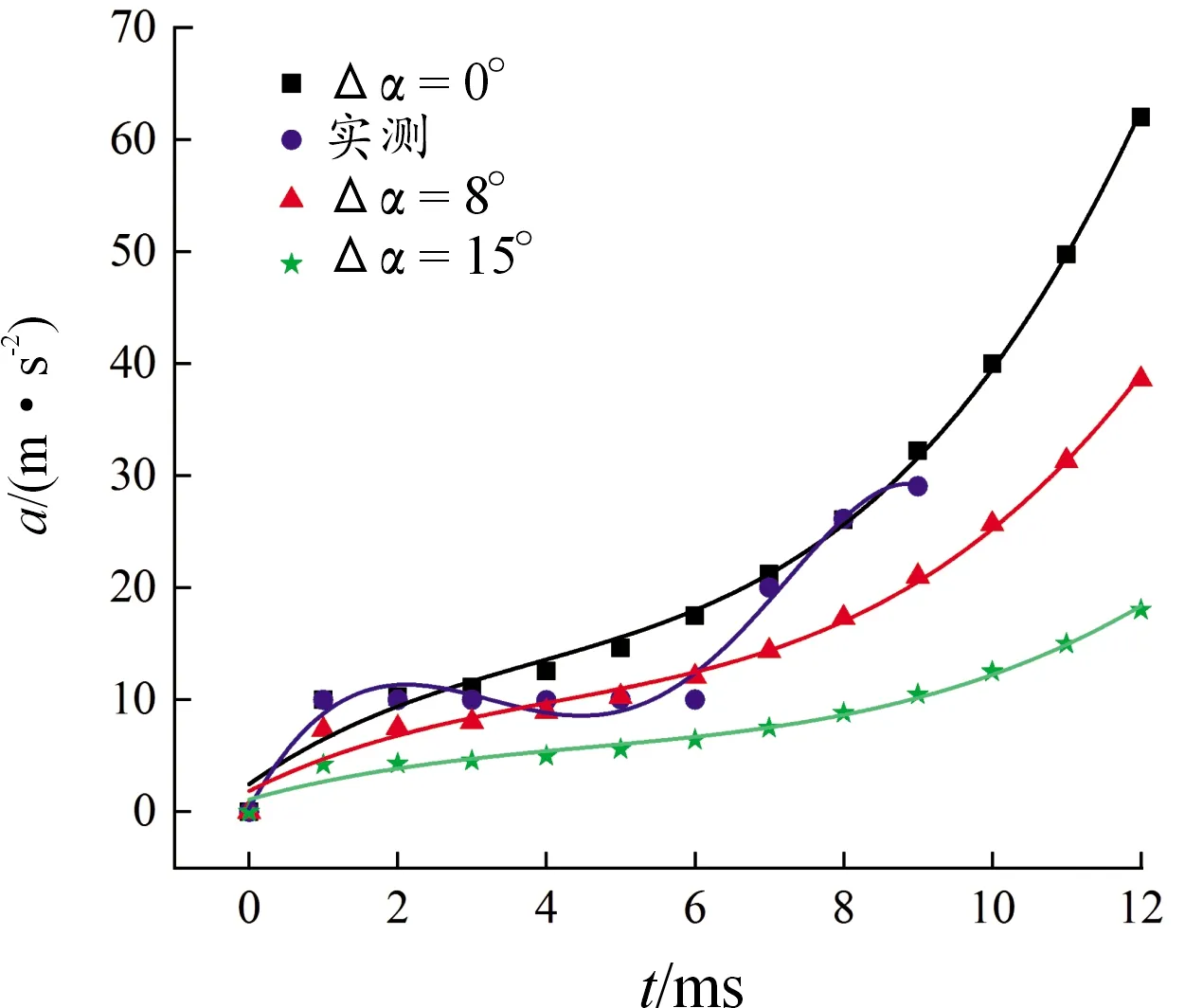
图15 加速度修正曲线
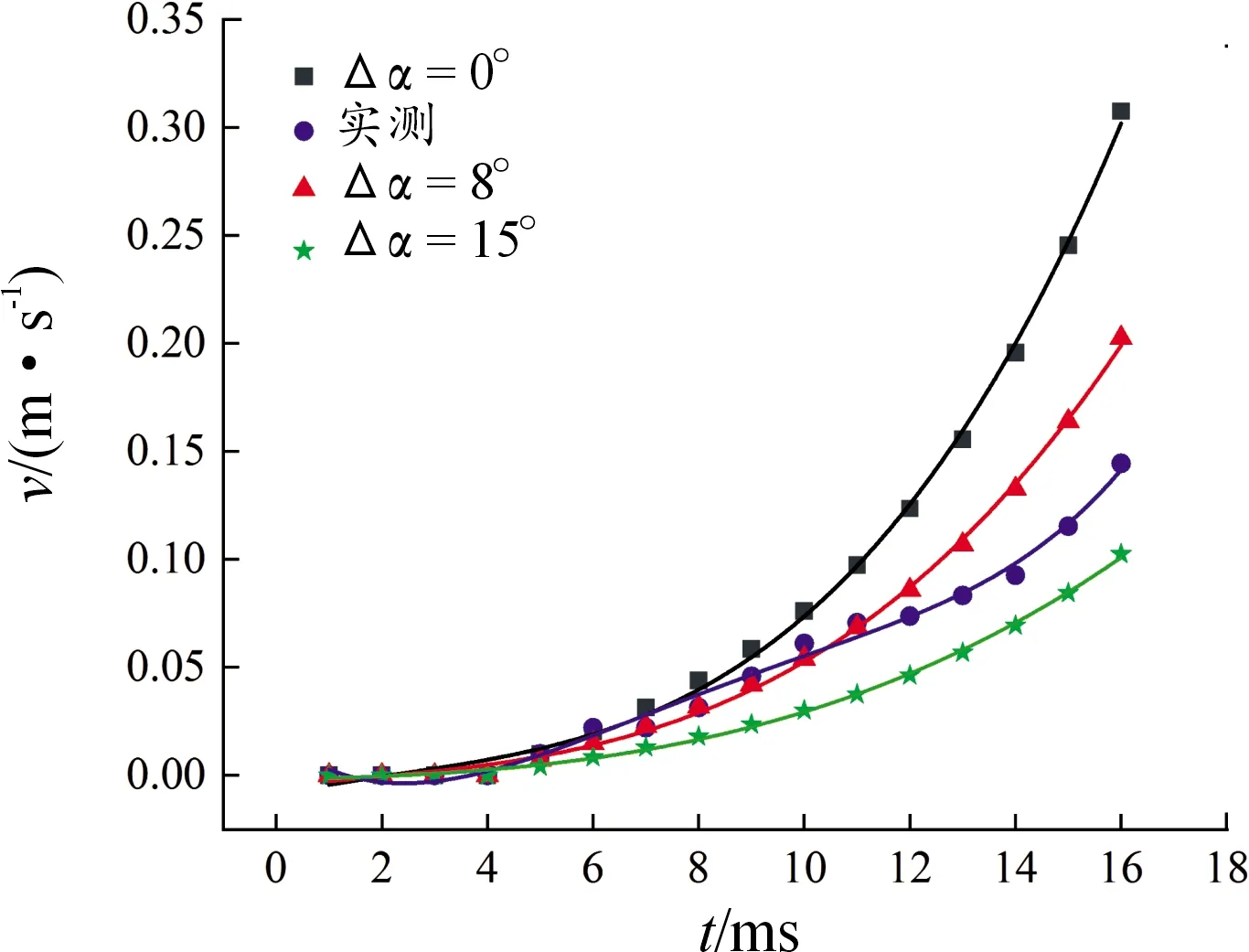
图16 速度修正曲线
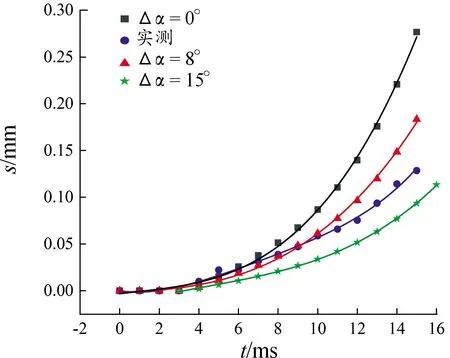
图17 位移修正曲线
3 控制策略分析
3.1 PWM调制下电流的建立
对转子实测数据做进一步分析,发现在上端线圈作用时,转子克服惯性需要的时间随着占空比D的增加而增加。不妨如此考虑,当转子质量一定时,其惯性力也为定值,要克服此较大惯性力,上端线圈电流所建立的磁场应为同一值,即上端线圈的电流需达到某一定值。为表现线圈电流建立过程,绘制PWM调制下的电流建立曲线,见图18。
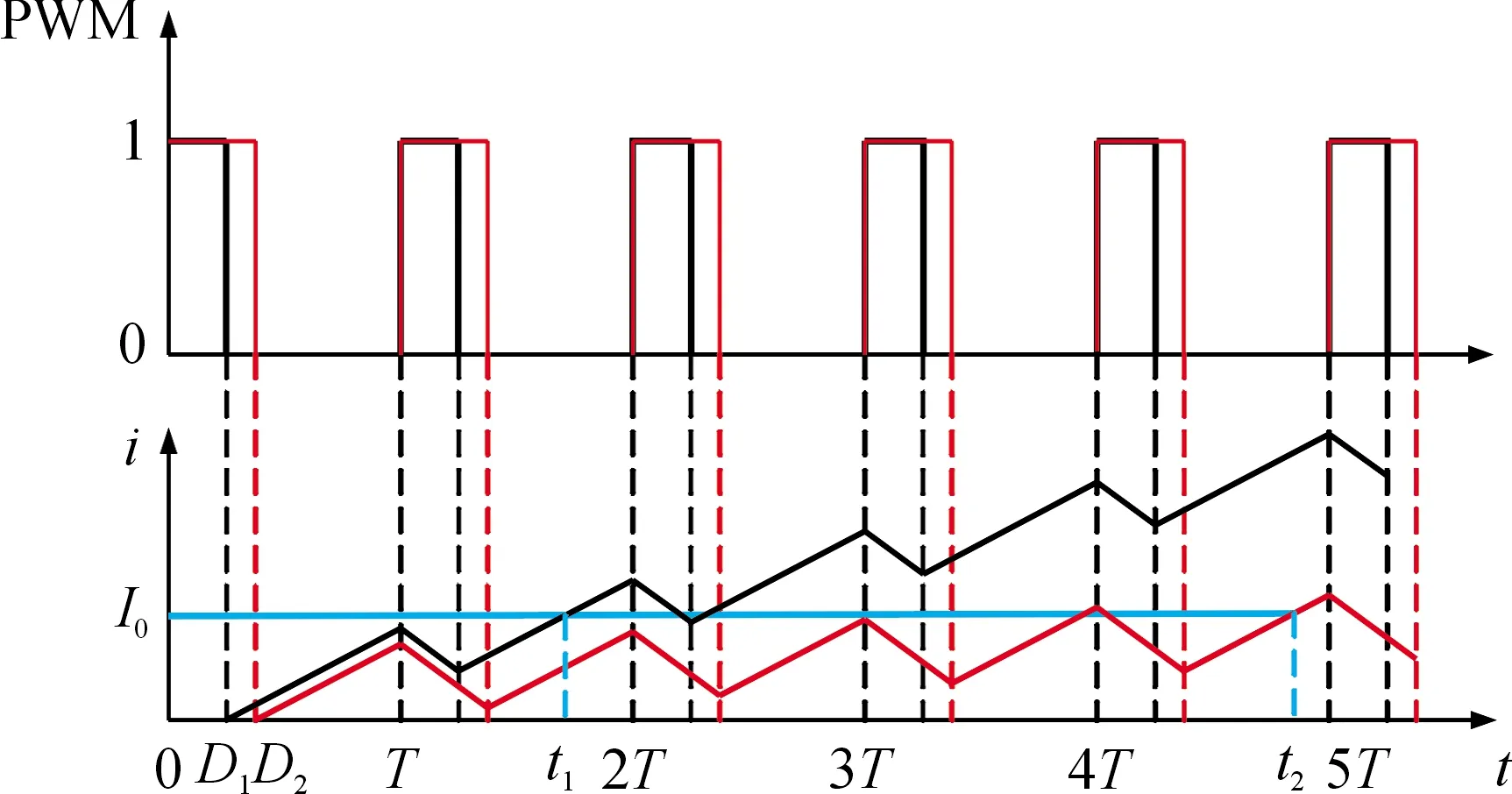
图18 PWM调制线圈电流建立过程
从图18可以看出,线圈电流建立过程不仅与占空比有关系,与线圈电流上升和下降斜率也有很大关系。假设克服惯性力的线圈电流为I0,由于硬件设计关系,线圈电流在Toff阶段建立,D1占空比下,在时间t1可建立I0,而D2占空比下要在t2时刻才能建立相同电流。过大的占空比会导致电流下降为0或负值,导致更长的周期也无法克服转子惯性力,这也是实际测量中经常遇到的问题。
线圈电流上升斜率由式(18)决定:
(18)
式中:udc是直流母线电压,udc=5 V;L为线圈电感;R为包括线圈电阻、电流采样电阻在内的线圈等效电阻。线圈电阻R的计算式为:
(19)
式中:ρ为铜电阻率,取0.017 2 Ω/m;L为导线长度;S为线圈直径。导线长度可由式(20)估算。
(20)
式中:D1为线圈内径;D2为线圈外径。从磁轴承设计机构看,线圈外径可用定子外径减去定子内径、再减去极靴宽度代替,线圈内径即极靴宽度,得到线圈长度估算值为8 026.8 mm,从而得到线圈电阻为0.275 Ω。与并联的大值采样电阻相比,R值可忽略不计。于是放大器允许的电流最大变化率为:
(21)
由于功放采用的是双极式T型结构,故线圈电流的下降斜率与上升斜率相同。
3.2 控制过程分析
磁轴承静态稳定悬浮控制过程中,避免转子碰壁需减缓其过冲情况。减缓过冲主要采用2种控制策略:① 对于上端线圈,适时减缓电流上升速度,引入微分参数。但微分参数引入过早会影响电流前期建立的快速性,引入过晚会导致减缓过冲效果不明显;② 仅靠减缓上端电流和转子自身重力作用来减缓过冲,效果并不明显,需要下端线圈的介入,并与上端线圈配合作用。下端线圈介入过早可能导致转子无法起浮,介入过晚则不能起到减缓过冲效果。
根据动力学分析可知,控制过程中,首先克服转子自身的较大惯性力,其次是向上的加速过程,这2个阶段均由上端线圈单独作用,为减缓转子过冲需介入下端线圈使转子进入减速过程。
上端线圈引入微分参数条件与下端线圈介入条件的限制为:① 上下线圈共同作用后使得转子轴心到达中心点的速度十分接近0;② 上端作用下转子位移与下端作用下转子位移的和小于0.6 mm。磁轴承转子实际控制过程中,占空比D是时刻变化的,控制电流无法得知。但占空比存在变化范围,可根据此范围和限制条件确定上端线圈引入微分参数的条件以及下端线圈介入的条件。上端线圈作用时间最小模式为:上端线圈直通,即上端线圈最大出力,下端线圈最小出力(能有效减速的力)。上端线圈作用时间最大模式为:上端线圈较小出力(能克服转子惯性力),下端线圈直通。
最小模式下,下端较小出力且能有效减速的占空比通过推算值为470。图19(a)为最小模式下转子的速度曲线。上端线圈作用3个周期到达最小位移作用点0.18 mm后,介入下端线圈作用8个周期,可使转子速度在接近悬浮中心时降到0附近,此时总位移为0.558 30 mm,小于0.6 mm,如图19(b)所示。
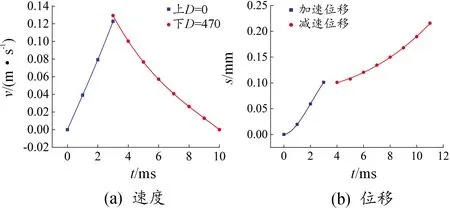
图19 上D=0,下D=470时转子速度位移曲线
同理,最大模式下,推算上端能克服惯性力的最大占空比为225。图20(a)为转子速度曲线。上端线圈作用17个周期到达最大位移作用点0.35 mm后,介入下端线圈作用3个周期,位移曲线速度和位移均满足要求,图20(b)为位移曲线。
综上,对于变化的占空比,下端线圈在最小模式位移作用点后介入并在最大模式位移作用点之前介入,即下端线圈介入作用点范围为0.18~0.35 mm,此范围内均能满足限制条件,可有效减缓转子过冲。最佳介入点需要通过仿真实验进一步比较后确定。磁轴承转子系统控制策略流程如图21所示。将0.18~0.35 mm作用点范围作为判断是否引入上端微分参数和下端线圈介入的条件。
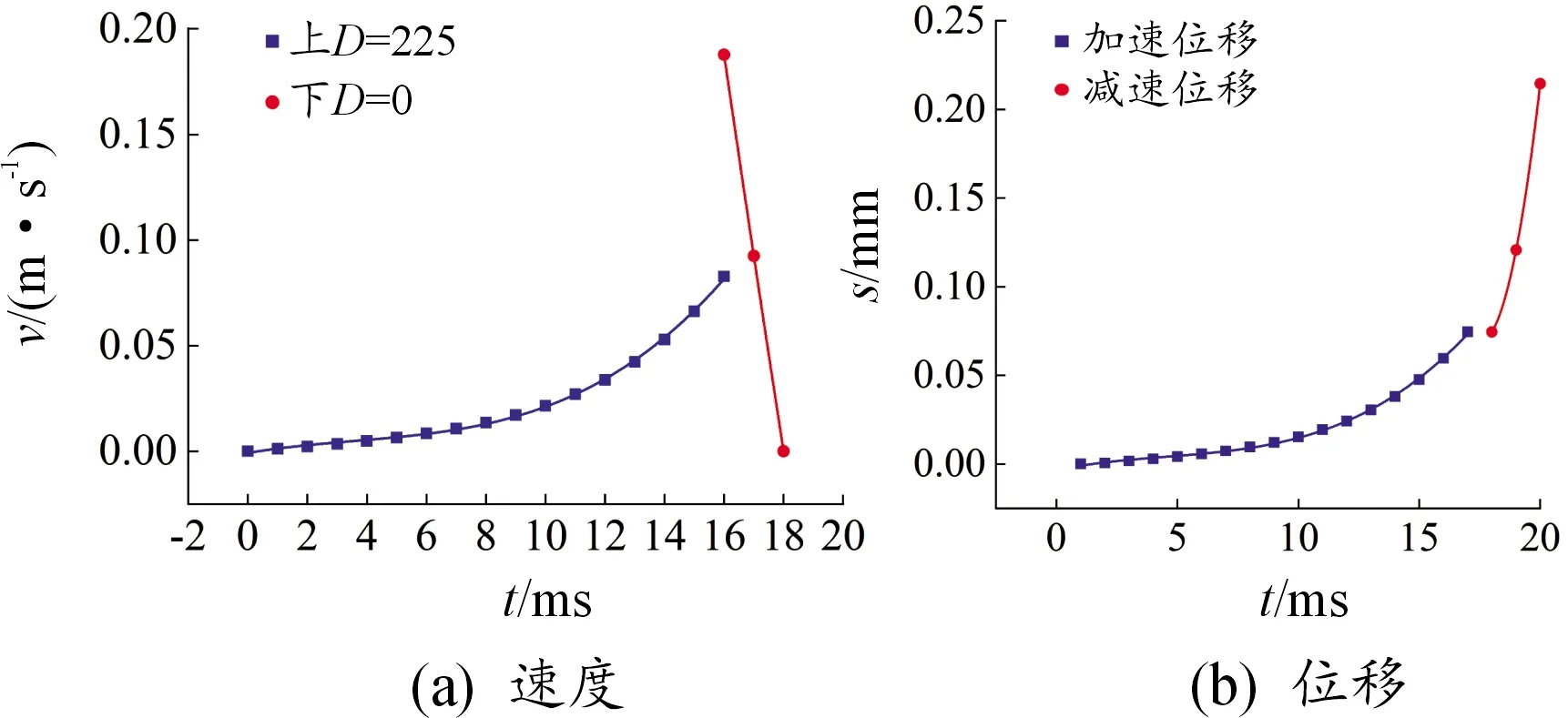
图20 上D=225,下D=0时转子速度位移曲线
4 系统仿真分析
基于Simulink环境,对磁悬浮轴承系统进行建模仿真(图22)。
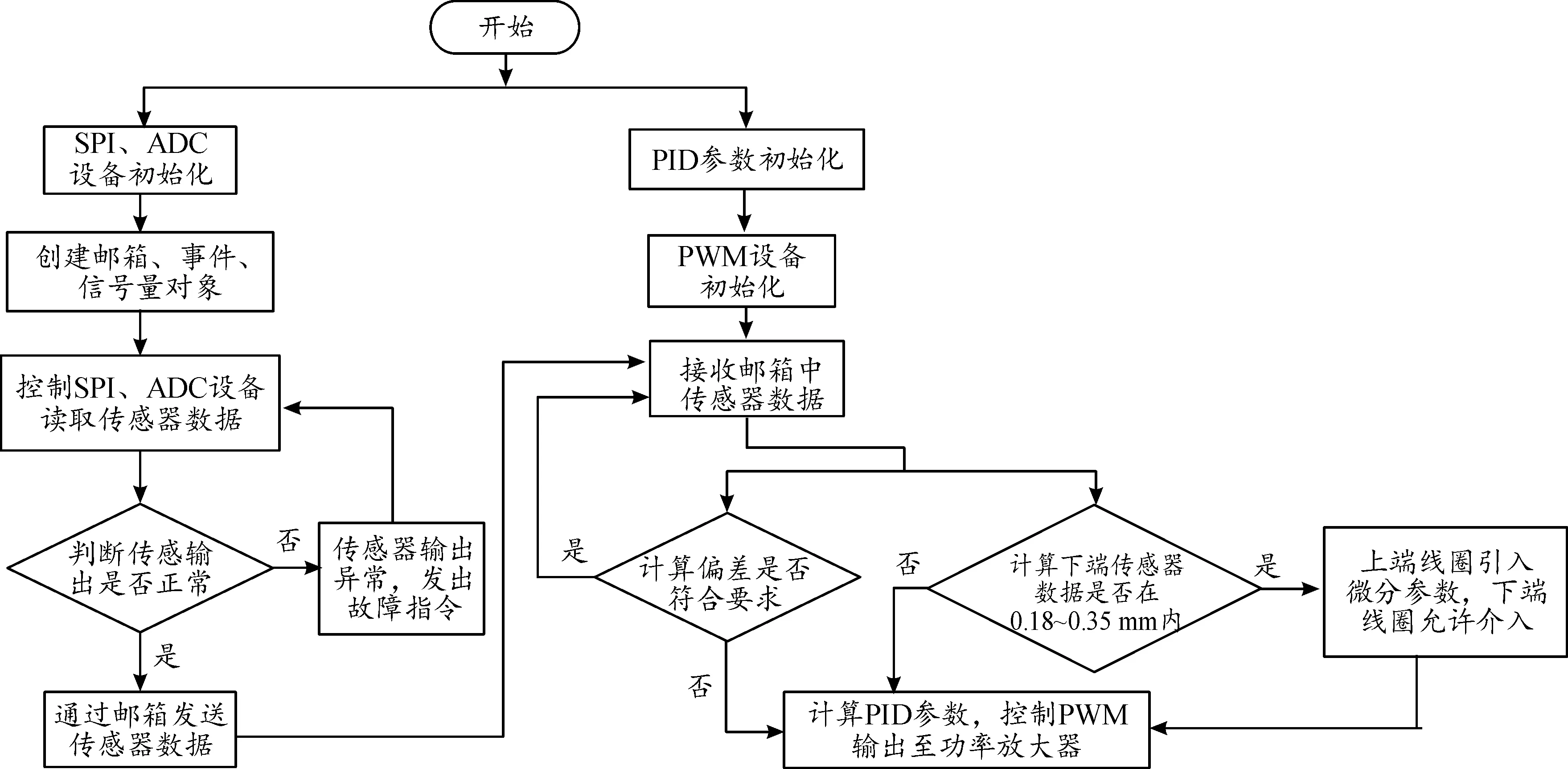
图21 磁轴承转子系统控制策略流程框图
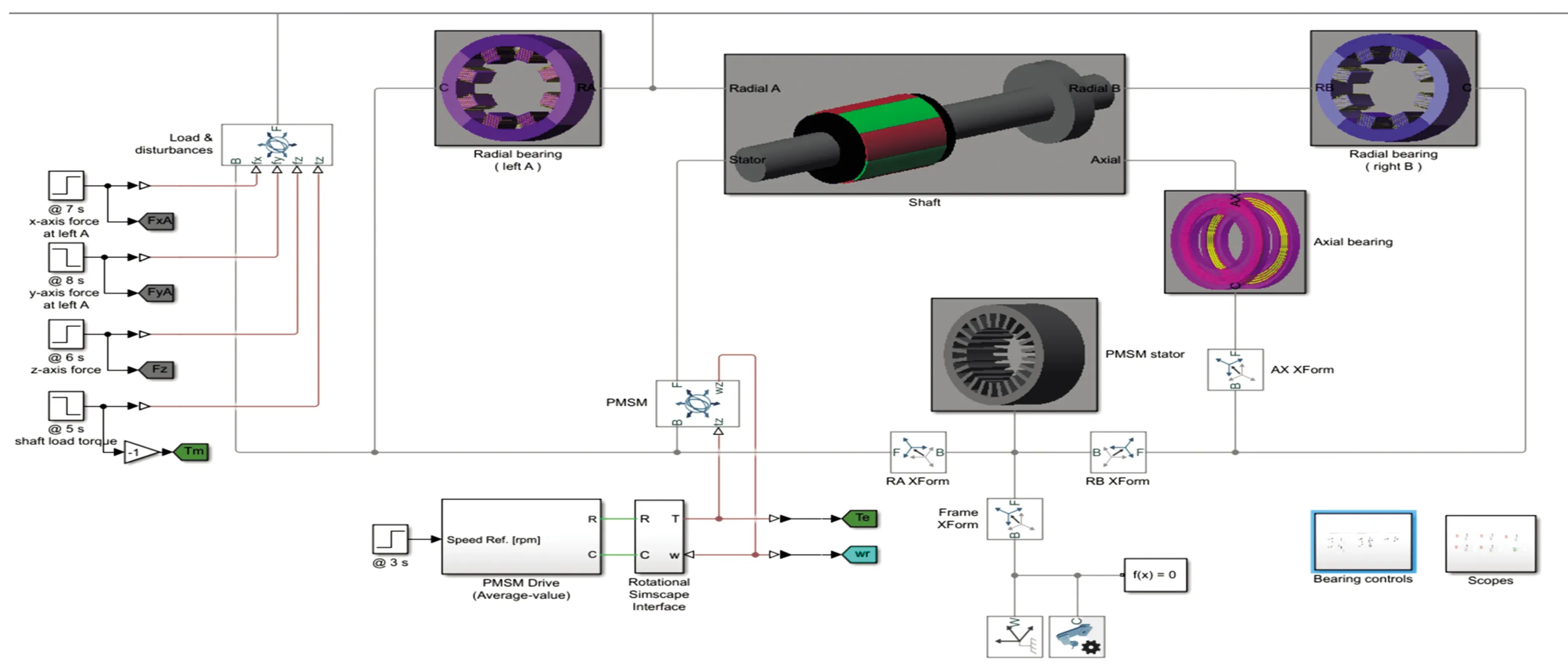
图22 磁轴承仿真模型示意图
图23、24分别为磁轴承上端、下端控制电流波形,图25为上下气隙波形。经理论推导,上端线圈作用周期为(3~17)T(T为1 ms)后介入下端线圈以及引入微分参数。但该部分控制周期未考虑转子克服惯性力前的电流积累阶段。
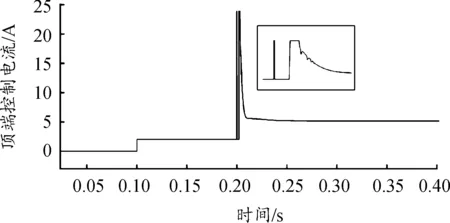
图23 磁轴承顶端控制电流仿真结果
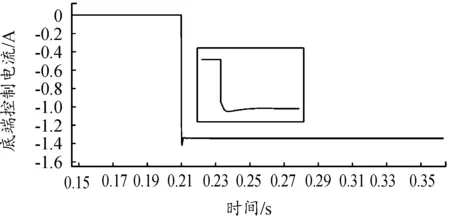
图24 磁轴承底端控制电流仿真结果
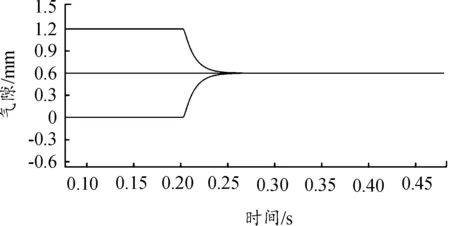
图25 磁轴承上下气隙仿真结果
从图23可以看出,0.1 s时上端线圈开始作用;结合图25可以看出,转子位移并未发生变化,一直作用到0.2 s时,控制电流急剧增加,为克服瞬时惯性力,转子开始运动,此后上端线圈作用,转子运动0.01 s左右(即10个作用周期,此控制周期在3~17T内),0.21 s时下端线圈开始作用,见图24。从图25可以看出,介入下端线圈后转子气隙变化变缓,0.24 s时到达平衡气隙处后稳定悬浮。
从仿真结果来看,上端作用10个周期后,即在0.26 mm作用点时介入下端线圈和上端微分参数可实现转子良好的静态悬浮。
5 实验样机验证
图26为磁轴承实验系统的样机及实验平台实物图。磁轴承实验系统主要由磁悬浮轴承、控制单元、位移传感器、电源、上位机等组成,电源供电为24 V。
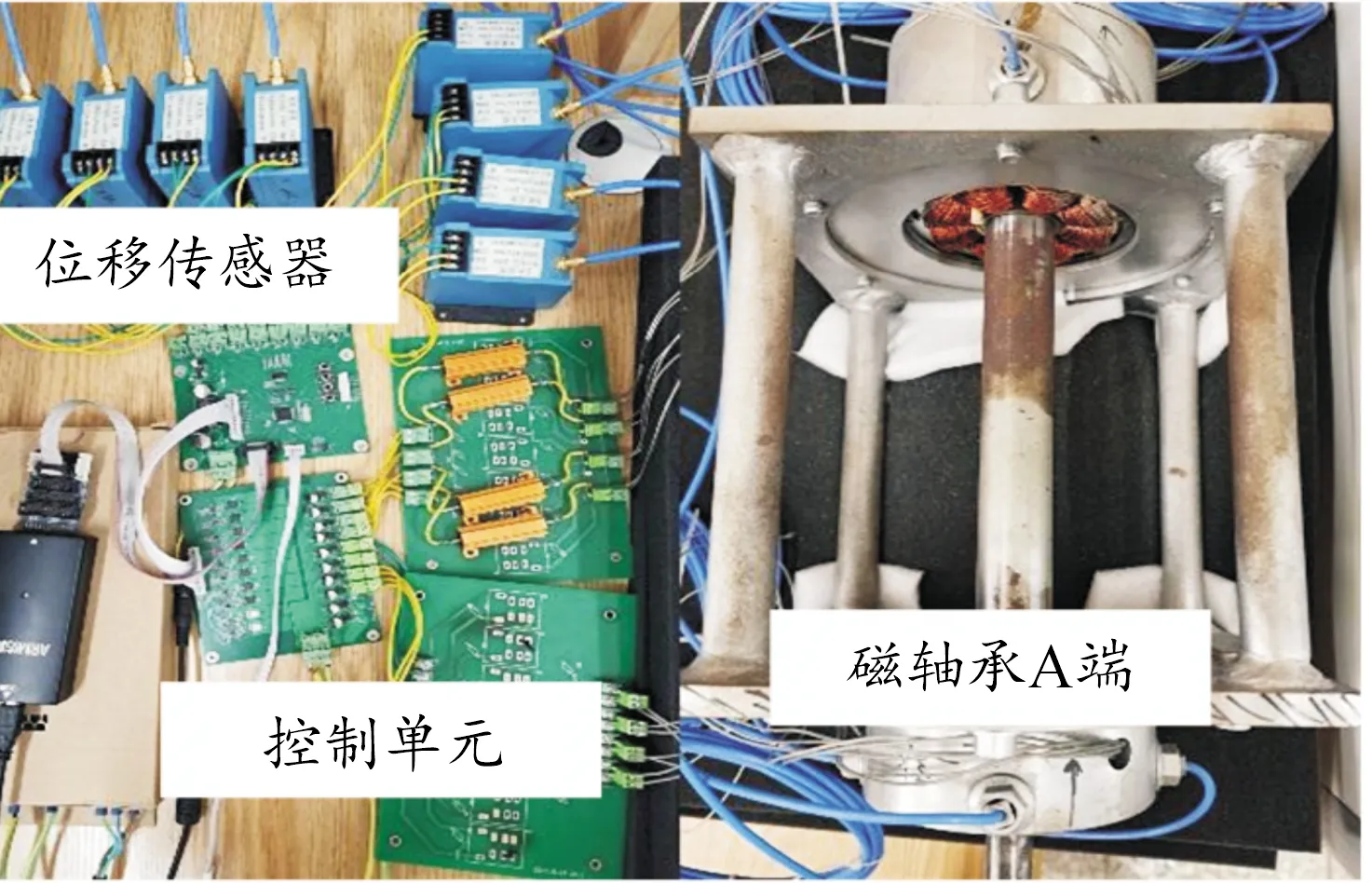
图26 样机及实验平台实物图
5.1 不完全微分PID控制
为对比不完全微分PID控制与介入作用点控制的差别,首先进行不完全微分PID控制实验。为更直观地表现转子的运动轨迹,应用2.2节转子轴心轨迹推导,绘制转子轴心轨迹图。图27分别为比例参数P、积分参数I、微分参数D、不完全微分参数D2下的调节轨迹。
从图27中可以看出,基于不完全微分PID控制时存在转子过冲碰壁情况,随着各参数的不断整定,转子碰壁情况逐渐改善,特别是引入不完全微分参数D2=60时,转子基本实现悬浮状态,进一步表明微分参数有利于减缓过冲碰壁现象。
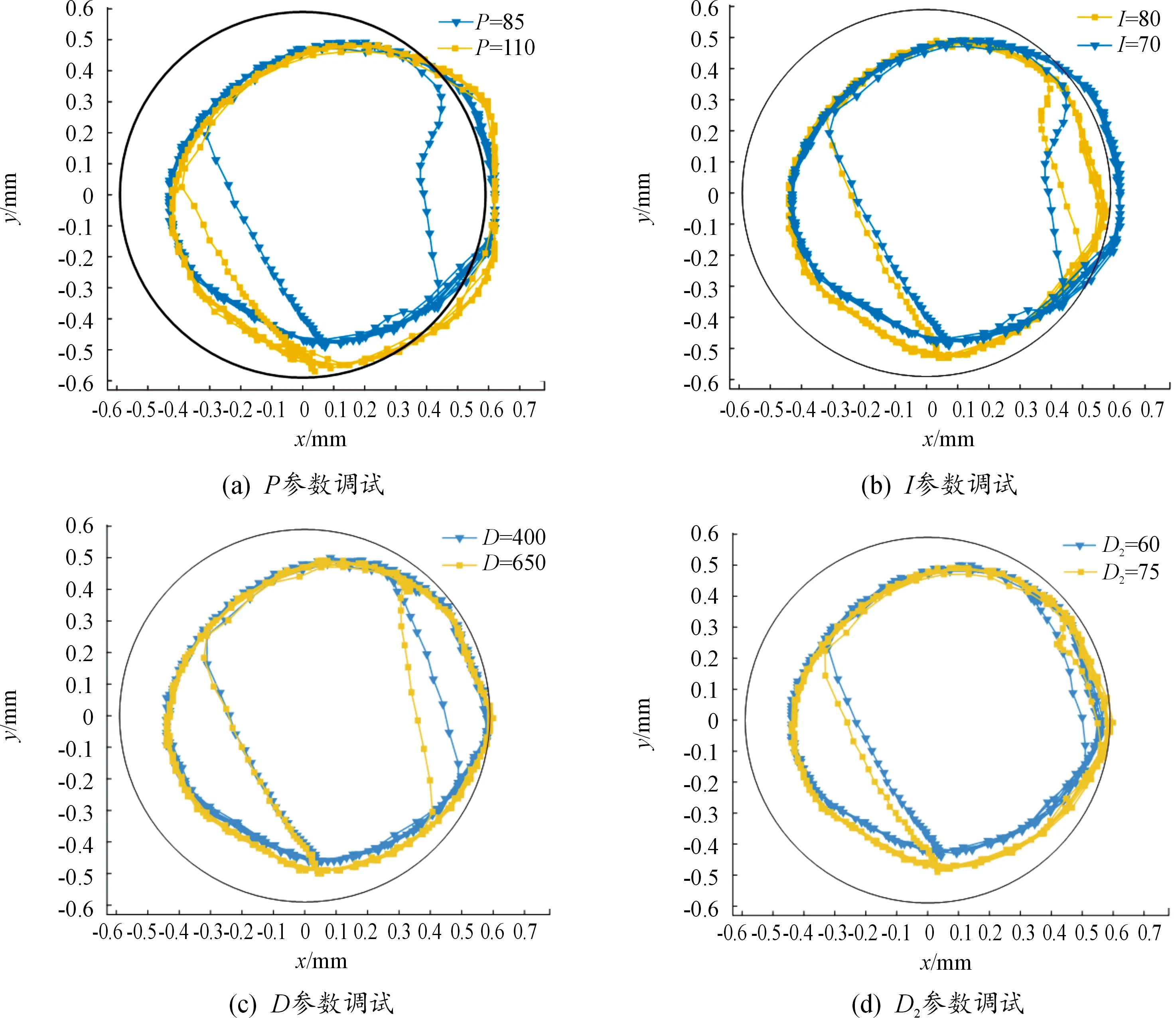
图27 参数调试轨迹图
5.2 作用点控制实验
引入不完全微分的PID控制虽能实现转子的基本悬浮,但稳定效果较差。通过动力学分析可知,下端线圈和上端微分参数引入的作用点范围为0.18~0.35 mm,仿真实验表明取0.26 mm时悬浮效果较好,故样机实验时取0.18、0.26、0.35 mm作用点做对比分析。如图28所示,(a)、(b)分别为以距离中心点以下0.35 mm和0.18 mm处为作用点的轨迹图,可以看出,相较于纯不完全微分PID,转子的悬浮效果得到了明显改善,0.24 mm作用点的改善效果更好,如图28(c)所示。绘制其三维轨迹图如图29所示。

图28 不同作用点转子平面轨迹图
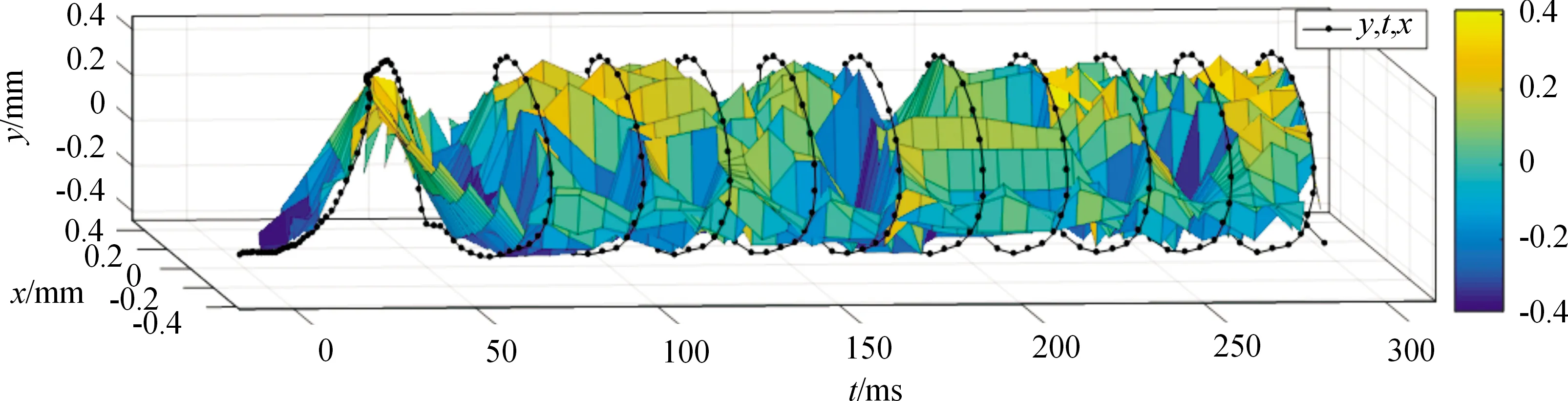
图29 作用点为0.35时三维轨迹图
图30为0.18、0.35、0.24 mm作用点下,轴心在竖直方向的坐标定量分析对比。可以明显看出,0.24 mm作用点的悬浮效果最好。图31为不完全微分PID控制下P=110、0.24 mm作用点的定量分析对比图,可发现引入作用点控制后,悬浮效果显著提高。另外,转子未悬浮状态与悬浮状态的实物图如图32所示。
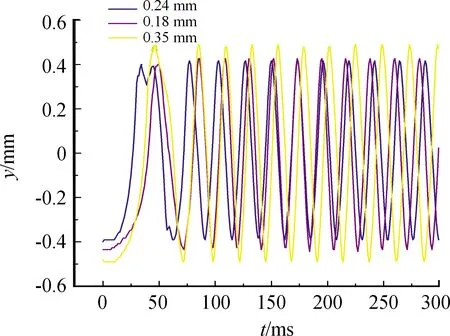
图30 3种作用点下转子轴心纵坐标曲线
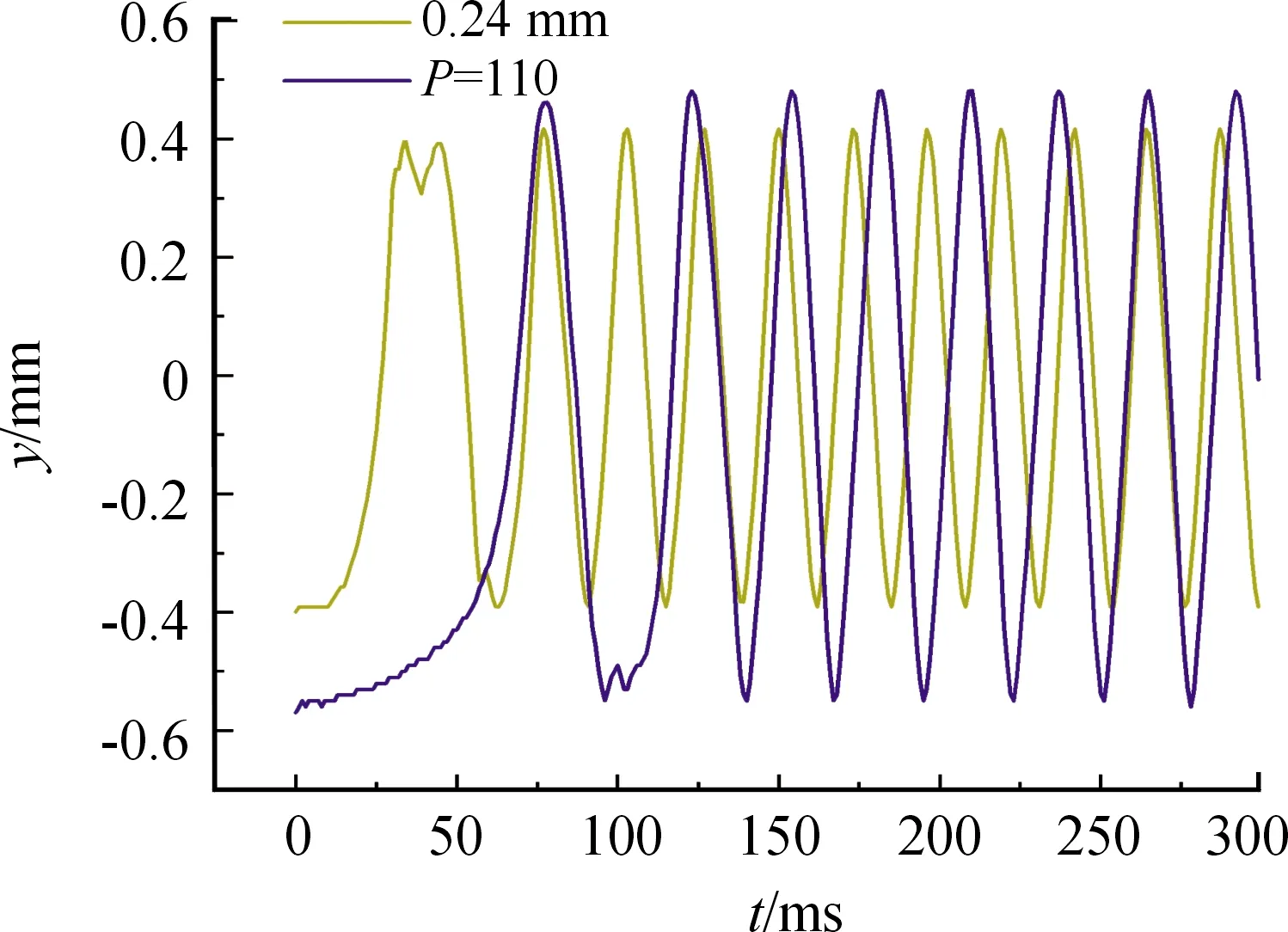
图31 P=110与0.24 mm作用点转子轴心纵坐标曲线
图32 磁轴承转子实物图
6 结论
1) 线性化的磁轴承数学模型下,修正后的转子理论运动过程与转子实际运动过程基本一致,验证了理论推导的正确性。
2) 基于限制条件,推导出上端线圈引入微分参数及下端线圈介入的作用范围为0.18~0.35 mm。
3) 作用点在0.26 mm处时,转子实现了良好的静态悬浮;样机实验时,作用点在0.24 mm处的悬浮精度高于0.18 mm和0.35 mm作用点处。较传统不完全微分PID控制,新控制策略具有优势,进一步提高了悬浮精度。
