自动泊车系统测试场景的提取与转换方法研究
2022-03-23张胜根杨良义邢春鸿黄俊富
张胜根,张 强,杨良义,邢春鸿,黄俊富
(1.汽车噪声振动和安全技术国家重点实验室, 重庆 401122;2.中国汽车工程研究院股份有限公司, 重庆 401122)
近年来,国内外搭载自动泊车系统的车型大量涌现,但经有关机构测试发现,已量产车型的自动泊车系统对国内泊车环境的适应性普遍较差[1-3]。这是因为大部分自动泊车系统的开发流程中缺少能代表中国典型车位特征的测试场景。国外虽然已发布了部分泊车辅助系统的标准法规[4-6],但这些标准法规中的测试场景是基于国外泊车环境而制定。与国内典型车位相比,国外泊车环境大部分仅包含平行车位与垂直车位,不仅缺乏斜向车位和地下停车场常见的方柱垂直车位,场景丰富度有限,而且标线车位的尺寸与国内车位也有差异。因而,国外标准法规中的泊车场景不适用于国内典型车位场景的自动泊车系统。为了提升国内自动泊车系统的性能,贯彻落实国家的制造强国战略[7],为汽车企业及零部件生产机构提供适应国内泊车环境的自动泊车系统测试场景具有重要意义。
现有的智能网联汽车测试方法可归纳为2类:基于功能的测试方法和基于场景的测试方法[8]。基于功能的测试方法单一地考核智能汽车的感知、决策、规划、执行等功能;基于场景的测试方法利用实际测试场景考核智能汽车外在的综合性能表现[9]。国内外学者对自动泊车系统的研究大部分是从产品开发的角度进行[10-11]。从测试角度进行的研究成果有限[12-13]。在自动泊车系统产品开发中,大部分产品开发机构采用基于功能的测试方法,产品对使用环境的适应性及冗余度有限。
Wachenfeld等[14]提出智能汽车测试场景的构建方法,主要通过描述场景特征的形式构建不同的测试场景。蒙昊蓝等[15]借鉴ALFUS思想,提出基于自主泊车系统测试用例构建框架的自主泊车系统测试体系。马煜森[16]对影响自动泊车系统的因素进行分析,设计了包含车位环境要素的测试场景要素库。闫晓雷[17]通过实地调研与问卷调查,探讨了适合自动泊车系统的测试场景。上述学者研究了基于场景的测试方法,但采取的测试场景大部分是通过描述场景特征的方法来构建的[14-19],不能有效代表国内典型泊车环境。为了客观反映国内泊车环境,需要对现实中海量的真实场景进行适当分类和提取,选取出最具代表性的典型场景。
本文中参考基于场景的测试方法思路,使用机器视觉手段从真实泊车环境中采集泊车场景数据,聚类提取出典型车位的类型及其特征参数,对其进行统计分析,转换成能够代表国内典型泊车环境的自动泊车系统测试场景。
1 基于机器视觉的泊车场景数据采集
1.1 场景数据采集方案
为了获取代表国内典型泊车环境的自动泊车系统测试场景,基于机器视觉(simultaneous localization and mapping,SLAM)算法对国内泊车位信息进行采集,采用K-Means算法对采集到的车位信息进行聚类分析,得到场景特征参数。
采集系统采用3摄像头方案。3路高清相机分别位于车辆前、左、右、后方采集泊车位信息,记录前、左、右视场信息。通过OBD口读取车辆速度等数据,支持在线标记和离线回放。场景采集设备示意图如图1所示。
基于专家经验选取国内不同省份典型城市的停车场,采集泊车环境数据。采集方案配置信息如表1所示。
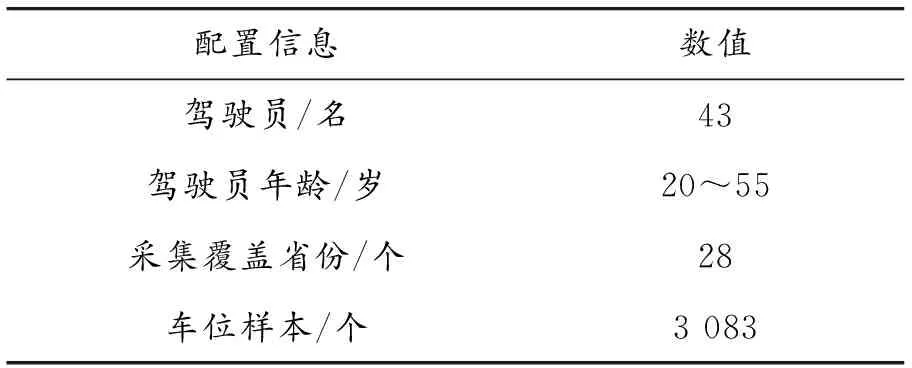
表1 采集方案配置
使用上述采集设备及配置,采用如图2所示的机器视觉场景数据采集流程对泊车场景数据进行采集和提取。

图2 场景数据采集流程框图
1.2 场景数据提取与聚类
对于泊车位信息的提取,采用智能提取算法加人工修正的方式进行,自动提取过程中应遵循4个准则。场景提取准则如表2所示。
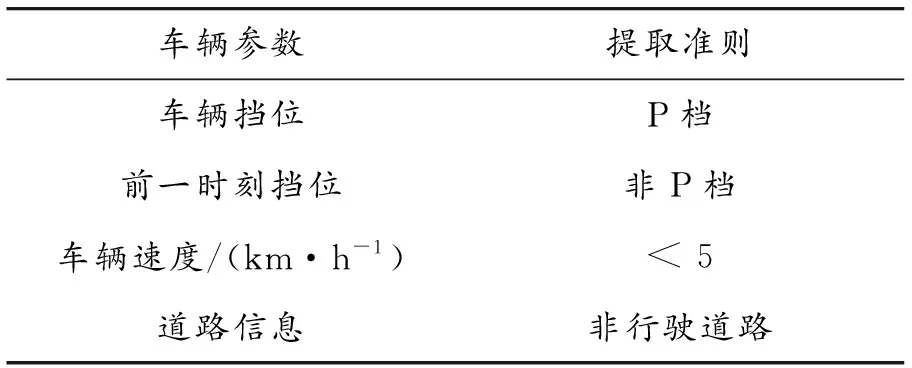
表2 场景提取准则
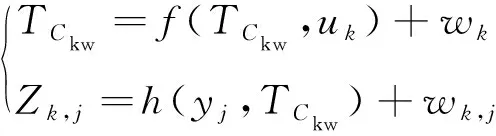
基于视觉SLAM算法提取相机识别到的车位图像及周边障碍物信息。视觉SLAM是使用摄像头来获取周围环境信息,利用图像信息来恢复相机位姿和周围环境的技术。在 SLAM 问题中,状态通常包含相机位姿、路标点三维坐标等[20]。SLAM 问题可总结为一个包含运动方程和观测方程的模型,在方程中位姿采用变换矩阵来描述,观测方程由相机成像模型给出。
SLAM的观测方程和运动方程为
(1)
其中:TCkw为观测位置;uk为像素坐标系中对应的坐标;wk为成像坐标系中对应的坐标;yj为世界坐标系中的观测点;Zk,j为路标yj对应的像素坐标;wk,j为观测点路标yj在世界坐标系中的坐标。
在本文中,基于视觉SLAM进行泊车场景参数提取的流程如图3所示。
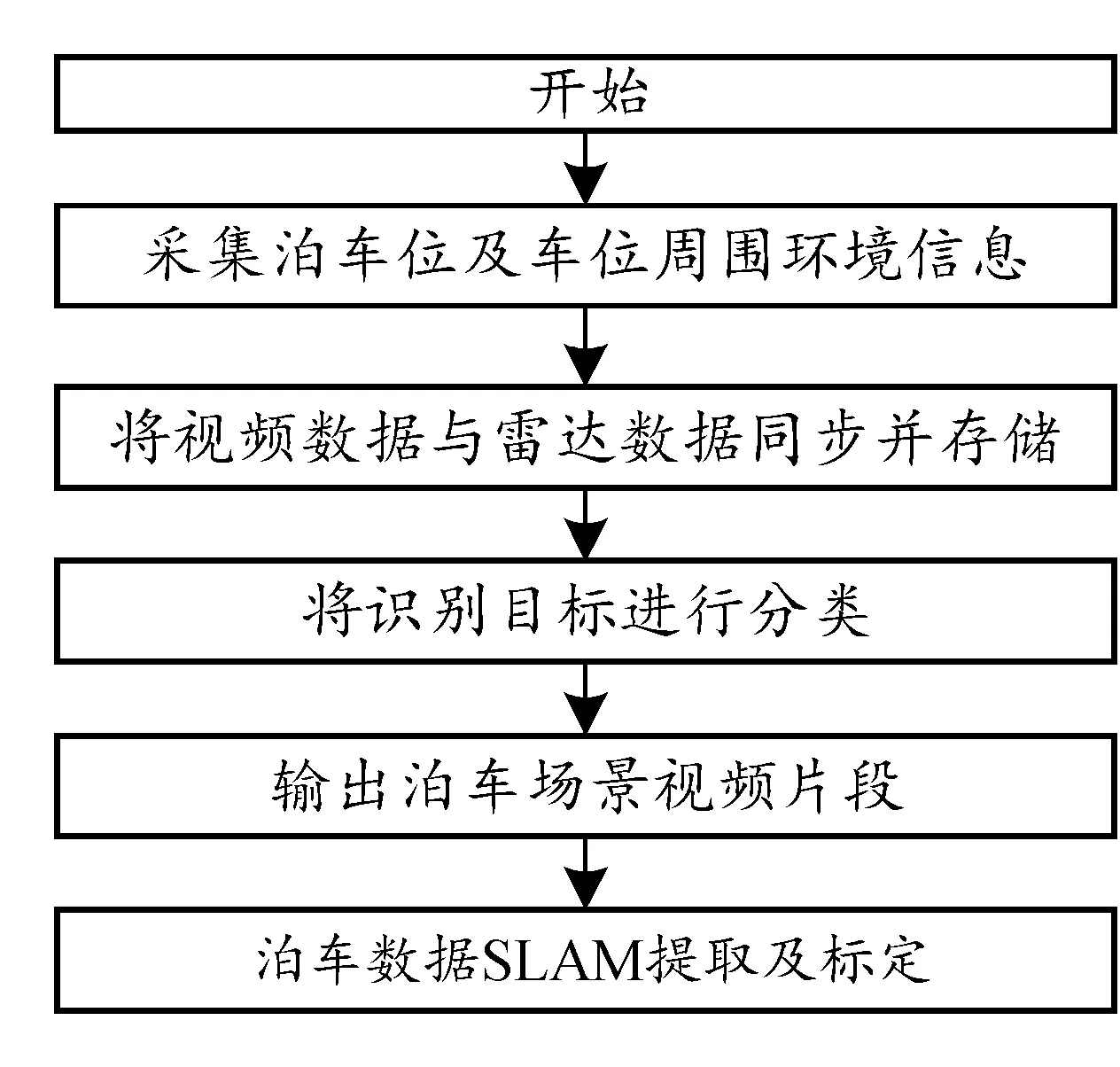
图3 数据场景采集流程框图
泊车位长度的计算方法表示为:
(2)
其中:n为车位像素点的个数;Δyi为第i个车位像素点对应的y方向的长度;Δxi为第i个车位像素点对应的x方向的长度。
通过对摄像头参数进行标定,反向解算出车辆所处泊位平面中泊车位的真实物理尺寸。 提取的参数涵盖自车信息、泊车位环境信息和泊车位信息共计68个小类,信息庞大且繁杂。由于泊车参数的维度较高,故维度之间解耦分析较为困难。为了得到典型车位的特征参数,需要对这些信息做进一步处理,将68类参数采用K-Means算法进行聚类降维。
对于分类问题,通常不会提供x与y的映射关系。这种使用机器自动找出其中规律并进行分类的问题称为聚类。K-Means算法是一种无监督学习算法,也是基于划分的聚类算法,它能够自动地将相同元素分为紧密关系的子集或簇[21]。
空间中数据对象与聚类中心间的欧式距离[22]为:
(3)
其中:x为数据对象;Ci为第1个聚类中心;m为数据对象的维度;xj、Cij为x和Ci的第j个属性值。
整个数据集的误差平方和SSE表示为:
(4)
其中:SSE值的大小表示聚类结果的好坏;k为簇的个数。
本文中研究的泊车特征参数聚类,当k值为15时,SSE的值最低(SSE=70),故认为将68类特征参数聚类降维为15类要素时最为合适,这15类要素对泊车位信息影响最大,15类泊车位信息要素如表3所示。
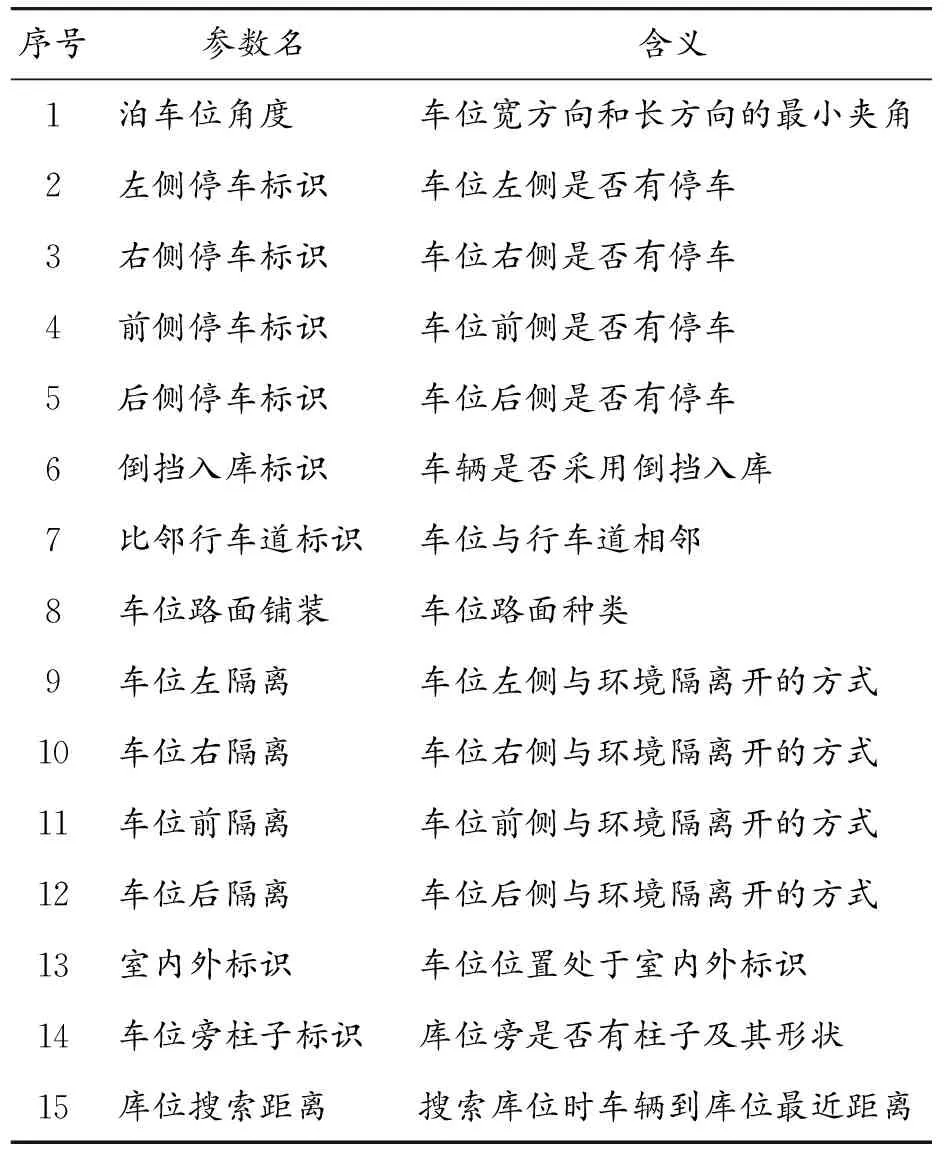
表3 对泊车位信息影响最大的15类要素
2 场景分析与转换
根据聚类降维后抓取的对泊车位信息影响最大的要素进行统计学分析。统计车位形状的比例,得到表4所示的统计结果。
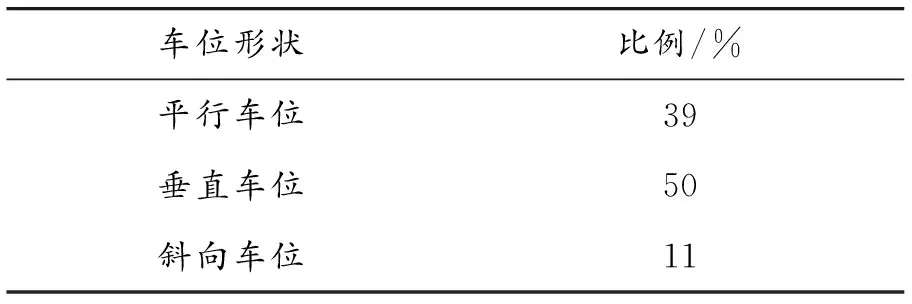
表4 车位形状统计结果
在将相关信息转换为自动泊车系统测试场景时应包含平行车位、垂直车位2种矩形车位和斜向车位,共3种形状的车位。应用测试场景进行测试评价时,对于3种车位形状的场景,其权重与统计得到的比例一致,为4∶5∶1。
对于平行车位与斜向车位,根据车位两侧是否有边界车辆,其形式分为车位两侧有车的双边界平行车位与车位两侧无车的标线平行车位。对于垂直车位,存在车位两侧有车、车位一侧有车而另一侧有方柱(常见于地下车库)、车位两侧无车的情形。
由上述对泊车位场景的分析,得到7种车位形式。对3种车位类型的7种车位形式进行统计,得到如表5所示的结果。
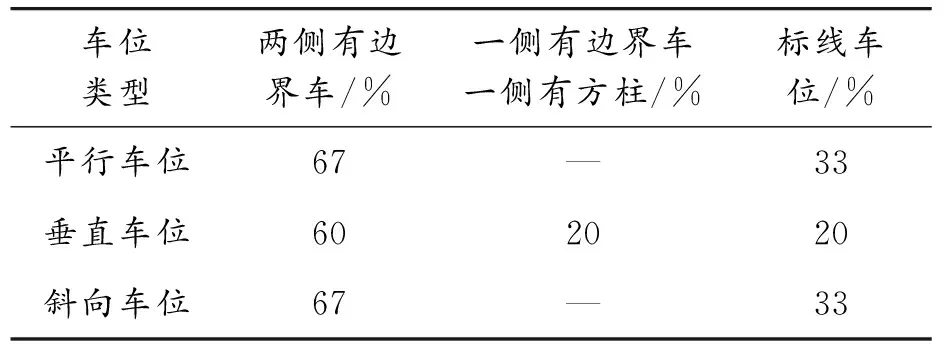
表5 不同车位形式的比例
由表5可知,在转换测试场景时,测试场景应包含平行、垂直、斜向车位3类形状,7种不同车位形式。
进一步分析表5发现,平行车位中,两侧有边界车辆的双边界平行车位与标线车位的比例约为2∶1;双边界垂直车位、方柱垂直车位、标线垂直车位的比例约为3∶1∶1;双边界斜向车位与标线斜向车位的比例约为2∶1。
在转换测试场景时,需遵循各种车位形式的比例,结合3种形状的车位比例对各个场景及其所占权重进行设置。不同车位场景所占权重见表6。
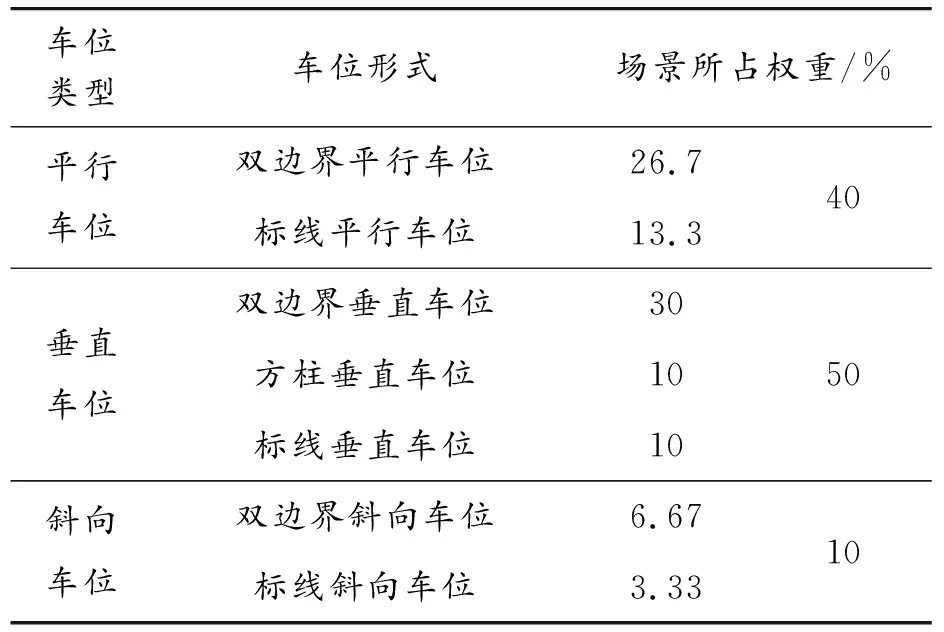
表6 不同车位场景所占权重
通过上述转换得到了测试场景中的车位类型及形式。下面进一步分析各个车位形式的特征参数。
对表3中9~12号要素(即车位四周的隔离方式)进行统计学分析发现,车位周围的隔离方式主要有11类元素。平行泊车位四周隔离方式的统计结果如图4所示。
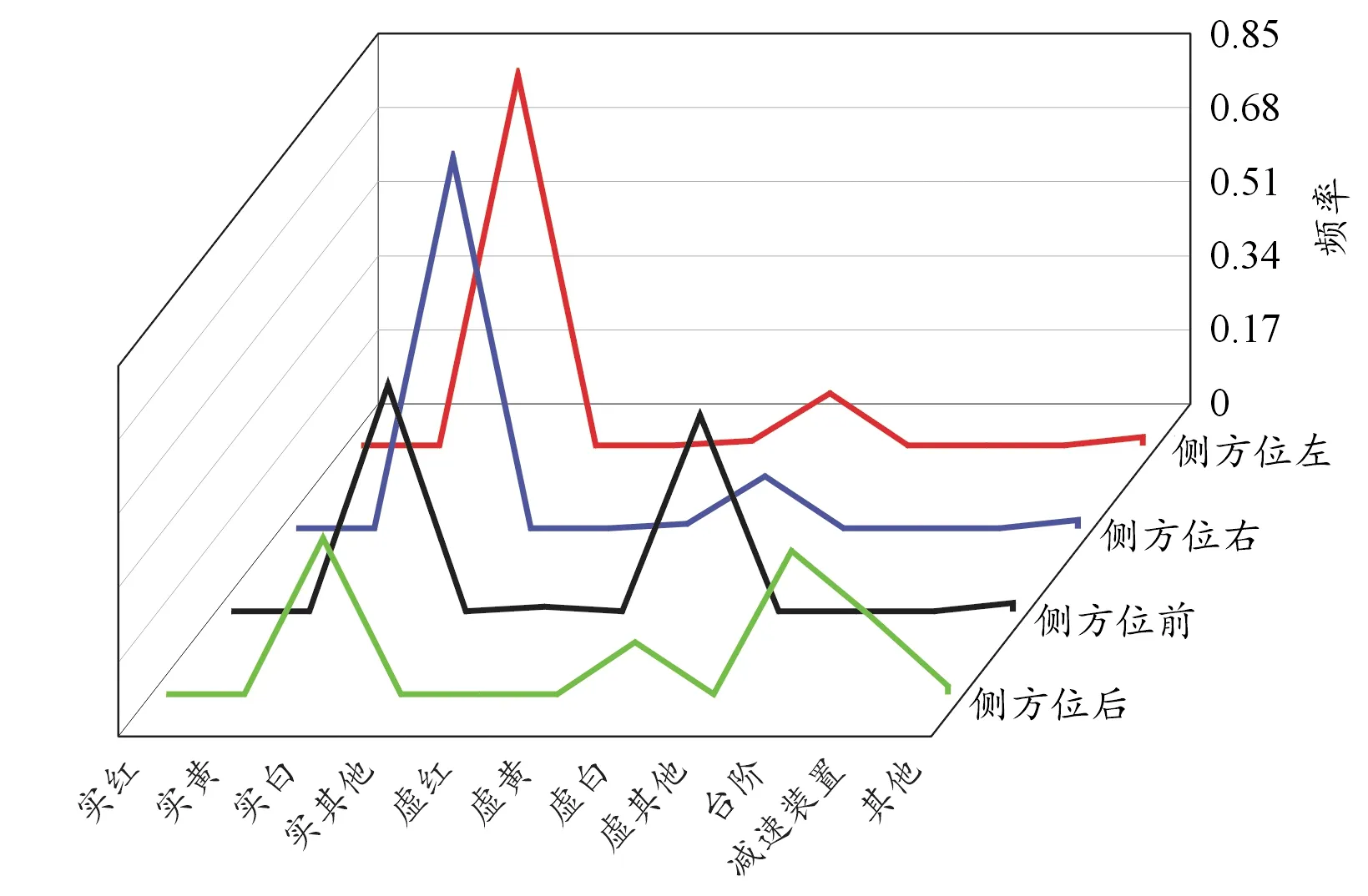
图4 平行泊车位四周隔离方式统计结果
采用同样的方法对垂直车位与斜向车位分别进行统计可知,左右隔离方式和前隔离方式的占比由高到低依次为:白色实线、白色虚线、黄色实线、其他。后隔离方式的占比由高到低依次为:减速装置、白色实线、台阶、其他。
根据以上统计结果转换到实际测试场景中,各个标线车位的隔离方式如表7所示。其中,路沿石隔离指平行车位靠近马路一侧由路沿石构成的隔离方式。
对采集的车位场景的车位特征参数做进一步分析,统计标线车位的尺寸参数,得到标线平行车位、标线垂直车位、标线斜向车位的尺寸概率分布。对各个车位尺寸参数及其概率使用高斯拟合。垂直车位的车位尺寸概率分布见图5。

表7 标线车位的隔离方式

图5 垂直车位的车位尺寸概率分布
使用同样的方法对标线平行车位和标线斜向车位的尺寸分布进行概率统计与高斯拟合,得到的标线车位尺寸统计结果如表8所示。
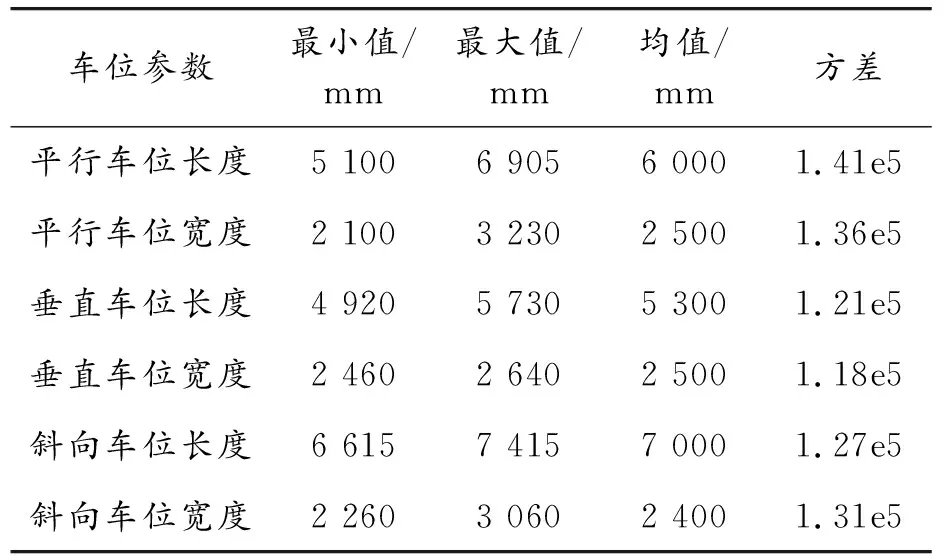
表8 标线车位的尺寸统计结果
使用同一辆采集车辆对有边界车位的车位尺寸进行采集后,统计得到边界车位的尺寸统计结果,见表9。
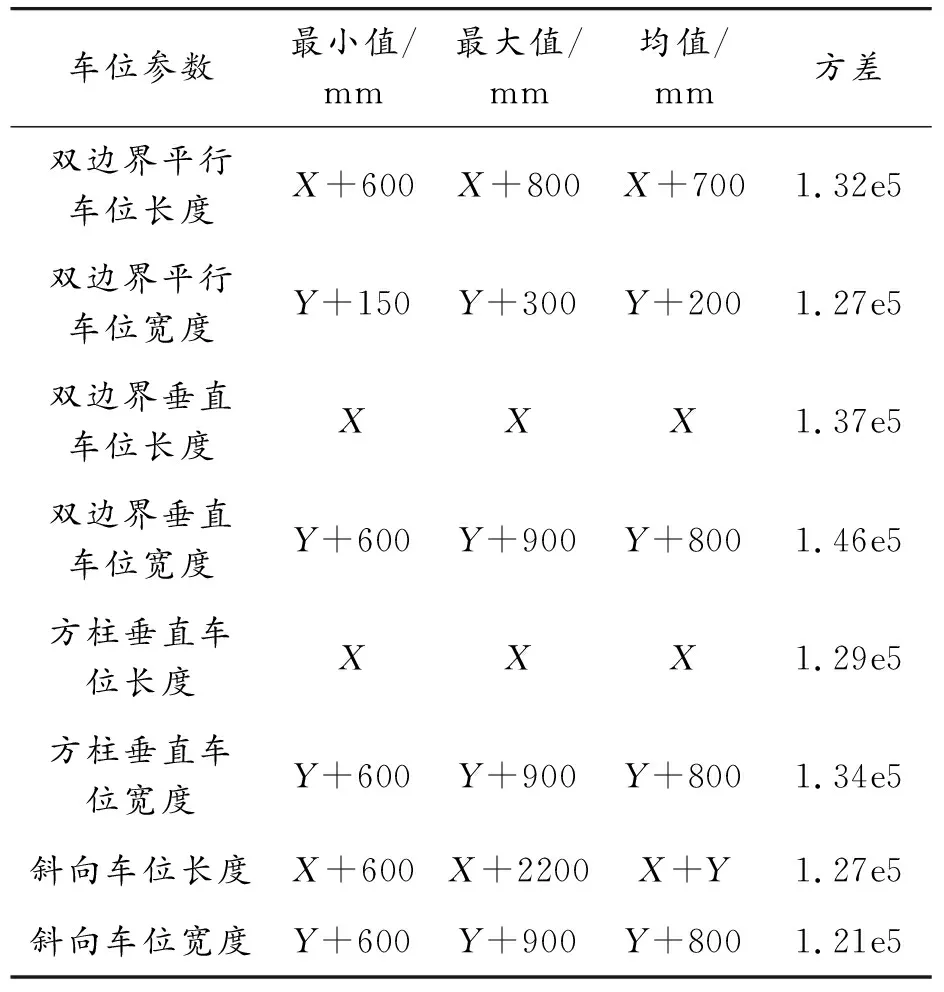
表9 边界车位的尺寸统计结果
根据车位特征参数分析,遵循场景所占比例,转换得到自动泊车系统测试场景及参数(表10)。
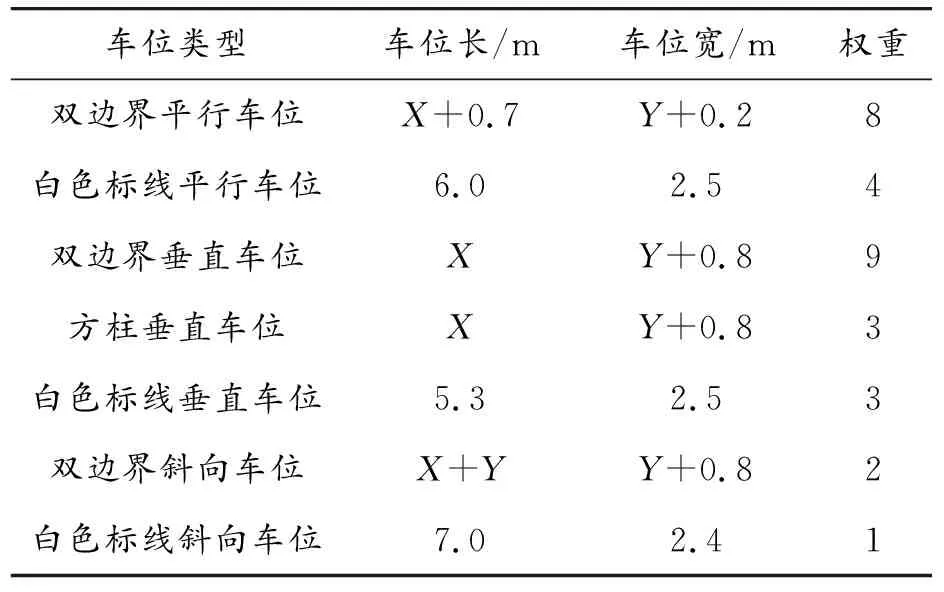
表10 自动泊车系统测试场景及参数
3 测试场景对比分析与实车测试验证
对国内外已有的部分标准法规中的测试场景(见表11)进行对比分析可知,与国内外已有标准相比,本文研究转换的测试场景更加丰富,包含了国内常见的地下车库方柱车位、双边界斜向车位、白色标线斜向车位。而国外标准法规中缺少这3种国内常见的车位类型。
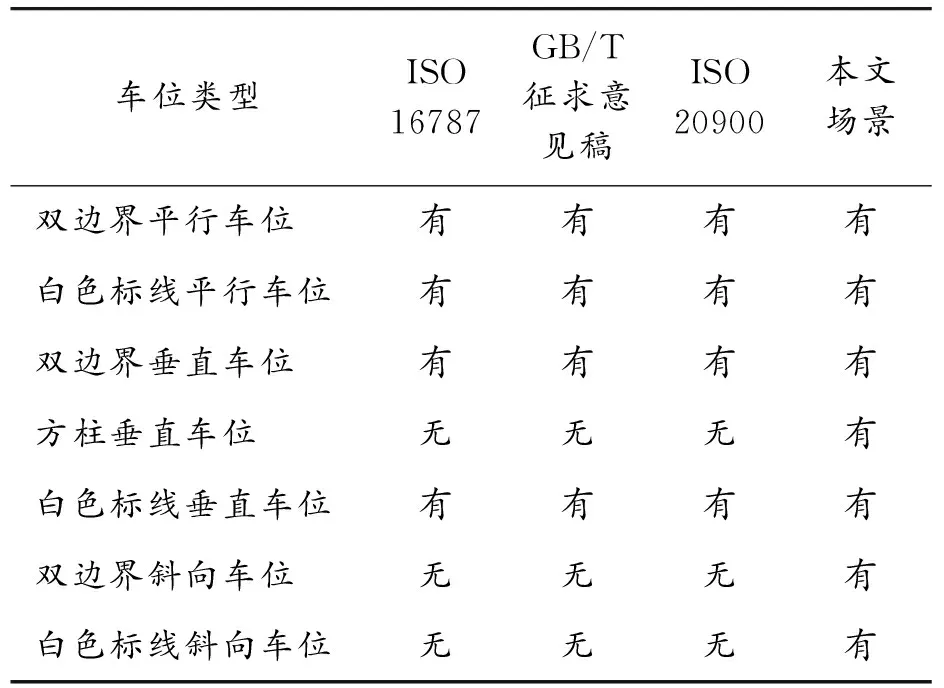
表11 不同标准中自动泊车系统测试场景分析
为了进一步验证自动泊车系统测试场景能客观反映不同车型的自动泊车产品性能,选取4款国内外已上市、搭载自动泊车系统的车型进行测试。4款车型涵盖了自主国产车型与合资车型。车型信息见表12。试验条件见表13。图6所示为测试设备实物图。图7为试验场景图。
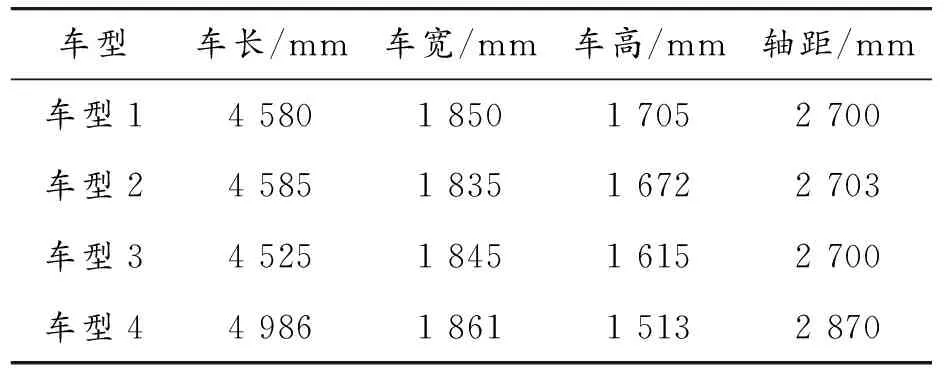
表12 车型信息
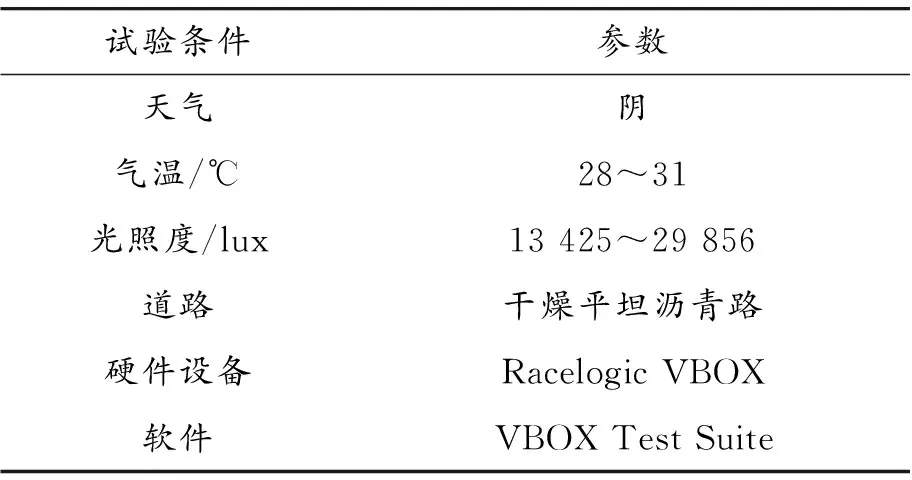
表13 试验条件

图6 试验设备实物图
测试车与目标车位的搜索车位横向间距为(1.2±0.2) m,车位搜索速度为(10±2) km/h。
记录试验数据,并对试验结果进行分析。根据转换的测试场景权重,对应分配各个场景的评价总分。根据2020版i-VISTA智能泊车辅助评价规程[23]中各泊车分项评分指标对4款车型进行打分。
采用本文测试场景对4款车进行的测试结果如图8所示。由图8可知,针对同一款车型,7种场景的得分差异较大;针对同一场景,如双边界平行车位,4款车型的得分差异也较大。4款车型在不同场景下的得分统计见表14。
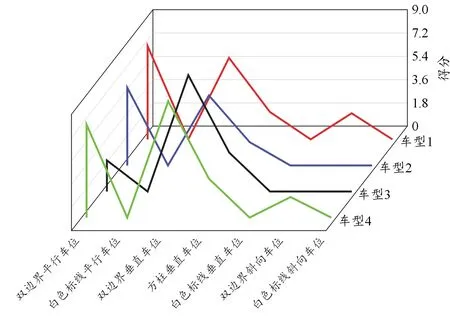
图8 本文场景测试结果

表14 试验得分结果统计
由图8和表14可知,4款车型的总体得分不高,不同车型针对不同的场景得分有较大差异,表明本文中的测试场景对不同车型的自动泊车系统有较大的区分度。
采用已发布标准法规中的测试场景对4款车进行测试并打分。采用ISO 16787中的测试场景进行测试,测试结果见图9。

图9 ISO16787场景测试结果
由图9可知,针对同一款车型,标准中具有的2种场景的得分差异较小,均接近满分;针对同一场景,如双边界平行车位,4款车型的得分差异也较小。分别采用GB/T 征求意见稿、ISO 20900中的测试场景进行测试,使用同样的评价标准对4款车型进行评价,得到的结论与ISO 16787的结论相似。以上已发布的标准法规中的测试场景对不同车型的自动泊车性能区分度较小,不能反映自动泊车产品对不同泊车场景的适应性。
根据场景测试结果进一步分析4款车型的性能表现。4款车型中得分较高的车位场景为双边界平行车位与双边界垂直车位;对于标线车位,4款车型均不得分,表明随机选取的4款车型均不能有效识别白色标线车位。由于泊车方案采用的是单一超声波雷达方案,为了更好地适应国内典型泊车位,建议采用超声波雷达+摄像头的融合方案。对比平行车位、垂直车位、斜向车位发现,4款车中仅有2款车能识别并泊入双边界斜向车位。该结果表明,对于有边界车位,斜向车位得分低,有将近一半的车型不能识别斜向边界车位,不能适应国内的典型泊车位,故建议加强对斜向车位的识别能力。
上述实车测试结果表明,所设计的自动泊车系统测试场景与已有标准法规中的测试场景相比,能更客观地反映泊车系统对典型泊车场景的识别能力与泊车能力,区分不同自动泊车系统产品的性能优劣。
4 结论
提出了基于机器视觉的国内泊车位场景采集方案及提取方法,对提取的泊车场景要素进行聚类降维分析,得到典型泊车位的类型和特征参数。对这些特征参数进行统计学分析,按照所占比例转换得到可用于试验的测试场景。基于测试场景进行实车测试验证。结果表明,所提出的测试场景与现有标准法规中的场景相比,细节更加丰富,能更全面地检验自动泊车系统的性能,为消费者购车、自动泊车产品的性能提升提供参考。
由于实车试验车型的样本数量有限,下一步将进行更多车型的测试,以充分验证所提出的测试场景的合理性,解决国内典型泊车环境中现有车型自动泊车时存在的短板问题,为企业产品性能提升提供参考。
