基于Solidworks的脚踏式货物升降机结构设计
2022-03-22宋健波陈奕豪
陈 璐,陈 博,宋健波,陈奕豪
(吉林建筑科技学院,长春 130114)
升降机是通过改变势能进行运输的大型机械设备,即通过动力机械拖动柔性件钢丝绳及货物进行上下运动完成运输过程。升降机是一种工程机械,其结构与技术应用均较为成熟。目前,国内外对升降机的研究均集中于数字控制与自动化技术研究,如远程遥控与自动控速,多绳拖拽用以提高升降机的工作效率,增加安全系数等[1-3]。
基于小型工程施工场所,充分考虑了缺乏电力设备的环境下,结合货物升降机结构与工作原理,设计了一种人力脚踏式的驱动方式,采用齿轮机构与螺纹连接的传动方式,实现货物上下运输与中途停止。简易的脚踏式货物升降机省工、省费用、安全,大大减轻了劳动强度,提升了施工进度。
1 脚踏式货物升降机的结构设计
设计的脚踏式货物升降机结构主要包括驱动机构、传动机构、制动机构与绕线机构。
1.1 驱动机构
升降机的动力系统是驱动机器的动力来源。传统的动力系统主要分为强制式、曳引式和直顶液压式三种。强制式动力系统主要采用电动葫芦或电动卷扬机进行强制驱动;曳引式主要采用曳引机驱动,利用钢丝绳曳引轮之间的摩擦驱动;直顶液压式主要通过液压动力源,把油压入油缸,使柱塞做直线运动,直接使升降机运动。
本项目设计的货物提升机完成了缺乏电力设备下的货物提升,驱动机构采用人力进行动力输出,即踏板结构,如图1所示。通过转动踏板,将踏板轴的动能传递到主轴上,实现货物的提升与下降。

图1 踏板驱动方式
1.2 传动机构
传动机构主要采用齿轮传动,如图2所示。主动轴即为踏板轴,当踏板转动时,主动轴随其转动,产生动力;主动轴上齿轮与从动轴上齿轮相啮合,运动从动轮传递到从动轮。从动轴上的齿轮与绕线机构的齿轮相啮合,控制金属绳的升高及降落。
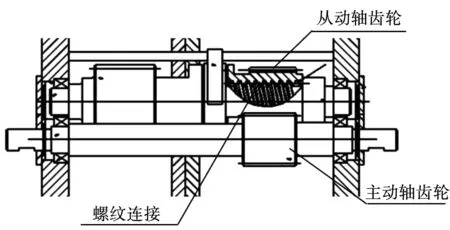
图2 传动机构
1.3 制动机构
在货物垂直运输中,上升与下降是相反的两个过程,必须能够随时使货物停止在空中,因此需要有制动机构。本项目的制动机构采用螺纹连接与棘轮共同作用,如图2所示。从动轴上齿轮与轴采用螺纹连接的方式,利用螺纹的自锁性,起到一定的制动作用。棘轮作为一种间歇运动机构,其独特的结构能够实现顺向转动,逆向停止。当转动踏板时,主动轴上的齿轮与从动轴上的齿轮啮合,从动轴上齿轮与轴之间采用的螺纹连接能够压紧棘轮带动从动轴转动,实现货物向上运动;当踏板停止转动时,棘轮机构中棘爪卡住棘轮,使其不能逆向转动,主轴停止转动,货物能够停在半空中;反向转动踏板时,主动轴齿轮反转,此时棘爪将棘轮松开,齿轮被挡圈挡住,带动从动轴反向转动,使货物向下运动。在传动机构与制动机构的共同作用下,使货物实现上升和下降,还能使货物在空中自锁,不会在重力的作用下快速降落。
2 基于Solidworks 软件的结构建模与仿真
2.1 Solidworks 软件
Solidworks是世界上第一个基于Windows开发的三维CAD系统,利用数值参数完成3D几何体建模过程,生产3D零件与装配体,再根据工程实际需要作出2D视图并完成尺寸标注,完成零件图与装配图。根据几何约束能够进行受力分析与运动分析,因此Solidworks软件广泛应用于机械设计、模具设计、结构优化设计、有限元分析、动漫设计等。
2.2 脚踏式货物升降机三维建模
根据设计与计算的各项几何参数与运动参数,利用Solidworks软件对脚踏式货物升降机进行三维建模,主要零部件如图3所示。
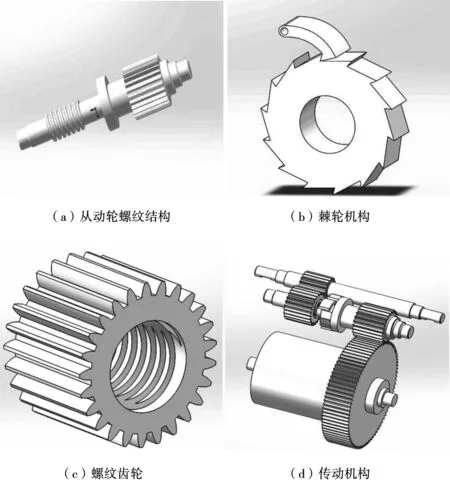
图3 主要结构设计
3 结语
本项目根据小型工地电力不足的情况,利用Solidworks软件设计了一款简易的脚踏式货物升降机。该设计的难点在于如何利用传动机构与制动机构实现物体的升降,抵抗重力停留在半空中。经过对样机的生产与实验,证明本设计安全可靠,成本低,具有一定的实际应用特点。后续研究将集中在如何增大重物的质量,完成更严谨的可靠性分析并解决润滑问题。
