一种灰度不均匀模型在公路病害自动检测中的应用
2022-03-21高永博李斌斌
高永博, 李斌斌
(1.甘肃省交通科学研究院集团有限公司, 甘肃 兰州 730030;2.甘肃省道路材料工程实验室, 甘肃 兰州 730030)
0 引言
近年, 随着我国公路事业的快速发展, 公路网建设已趋于饱和, 公路事业亦趋向养护维修。以前, 对于道路检测多采取人工检测的方法, 但由于其具有耗时耗力、危险系数大、检测成本高等缺点, 不能快速地对收集的数据做相关性能评价, 故已不能成为主流的道路病害检测方法[1-4]。随着高分辨率影像和高清图像处理技术的发展, 基于视频图像的道路病害智能化、自动化识别技术研究已势在必行[5-8]。Medina等[9]提出了一种红外图像增强算法, 其主要原理是将图像的灰度值映射到直方图当中, 然后采用削波直方图均衡化, 对其大直方图中的小直方图进行切割, 实现红外图像的增强;虽然该方法能较好的与原始图像形成对比, 但是没有考虑灰度不均匀性在图像中的存在。顾振飞等[10]提出了一种基于区域显著性识别的图像增强方法, 该方法首先依据图像各区域的亮度和纹理提取图像内容, 然后依据图像内容, 采用暗通道先验的方法得到图像透视图, 在此基础上, 利用导向全变分模型对区域显著的图像部分进行图像增强;该方法由于没有考虑图像灰度不均匀性, 使增强后图像的对比度下降。Abhisek等[11-13]对道路病害图像进行识别时, 使用反向传播神经网络(BP)算法实现了道路病害的归类划分, 其较高的精度满足道路检测规程的需要, 但由于未考虑特殊天气对智能检测数据的影响, 其算法还需优化。郭钰璐等[14-16]提出一种结合边缘信息的对比度增强算法, 该方法首先利用滤波将图像分解为基础图像和细节图像, 其中基础图像利用对比度限制直方图的方法均衡, 细节图像利用Gamma 变换增强信息, 然后融合处理后的两幅图片, 接着利用自适应直方图均衡和拉普拉斯锐化滤波对原始图像进行灰度不均匀处理, 最后将融合后的图片和处理后的灰度均匀图片进行线性加权并融合, 以重建出最终的红外图像;该方法可以较好的提高原始图像的对比度, 但对较小的目标该方法处理效果不佳。
基于上述研究基础, 本论述提出了一种针对采集图像灰度不均匀性的处理方法。该方法原理是将一张采集的路面灰度图像划分为非均匀背景光照、道路病害及高频噪声三个组成部分, 然后通过双线性插值和曲面拟合的方法在三部分中将道路病害从中提取出来的方法。
1 灰度不均匀校正算法
1.1 加法模型
以路面灰度图像为目标函数, 以非均匀光照背景、道路病害及高频噪声为变量因子得下列公式:
式中,T(p)指一张灰度不均匀的道路病害识别图像;Th(p)指道路识别病害图像中的不均匀光照背景;Tb(p)指道路识别病害图像中的病害;Tg(p)指道路识别病害图像中的干扰因素, 如路面杂物、减速带、凸起标志等。
1.2 乘法模型
式中,A(p)指光照的不均匀程度函数;T'(p)指灰度均匀的道路病害识别图像。
式中,T'N(p)指一张标准均匀光照图像在非均匀成像系统下的成像;N指一张标准均匀光照图像均匀光照后在各位置处的灰度级常数。
综上可知, 系统中所得的图像可以通过不匀均函数A(p)进行校正。
所以, 由公式(3)与公式(4)可以推导出:
1.3 灰度不均匀型模型
在实际现场采集数据过程中发现, 当采用加法模型时, 要从Th(p)和Tg(p)中提取出病害信息Tb(p)时很困难;当采用乘法模型时, 主要关键点是得到不均匀函数A(p), 但由于A(p)在随检测车的移动过程中摄像机焦距的改变而改变, 故用前期确定好的A(p)来校正所有病害图像是不实际的。理想的状态是从一副病害图像中分离出Tb(p)和A(p)。将组成路面的物质视为是均匀一致的, 故其亮度场也能视为是均匀一致的, 则可做以下假设:
在t0时点, 道路检测车采集到没有病害的路面图像T0;在t1时点, 道路检测车采集到了含病害的图像T1, 假设t1-t0差值很小, 通过对T1与T0两幅图像配对后, 可近似求得背景灰度均匀的病害ΔT=T1-T0, 当进行分割图像时, ΔT中各个分割部分可以视为都是均匀一致的。
由假设可知, 在很短的时间内,T1与T0采集的两幅图像中肯定会有重叠的部分, 即得公式(6):
式中,M(x,y)为T1与T0的重叠背景像素, 且φ不能为空集。
根据二次曲面拟合及插值法得到重叠部分像素M(x,y)的灰度值, 即:
故由上述假设可知:
或由公式(5)可知:
式中,T1(x,y) 为T1中(x,y)的图像像素灰度值,T'1(x,y)为T1校正后(x,y)的图像像素灰度值;T'0(x,y)为T0中图像像素(x,y)的灰度值。
2 求重叠交集φ
假定:光照不均匀在采集的病害图像中表现是明显的, 但将一张图像分割成若干张小图像, 可视为若干张小图像上的灰度是均匀的;图像背景或者病害在分割的小图像上至少有一处均匀或者近似均匀[17-18]。
实施步骤:
(1)首先对采集的原图像进行分割, 设原图像的大小是256*256 的像素, 将其以8*8 像素分割, 将每块视为一个背景块, 共得到32*32块。块的大小一般依据原图像的大小和能承受的局部图像均匀性的大小程度确定。对较小的图像分割要稍微小些, 大的图像可适当调整其大小。
(2)将分割后得到的每块归纳到φ中, 这样就可得到T1的背景子集φ。由于采集的病害图像中含有沥青、病害及石子(沥青路面)或者水泥、病害及石子(水泥路面), 其中沥青或者水泥是分布占比最大的, 且两者的灰度值均处于中间位置, 故选取沥青或者水泥像素M(x,y)作为背景像素。最后去掉分割后25%亮度偏大和25%亮度偏低的小图像, 取剩余的50%的分割图像为最终的重叠交集φ。
3 双线性插值
考虑到实际过程中图像上的灰度变化呈现的是一种渐变过程, 故在处理灰度不均匀时本论述采用相对平滑的函数, 通过拟合将重叠交集φ溯源到初始采集图中。因此本论述选用了能使图像表面连续, 实际效果良好的双线性插值法进行溯源求解。
已知Q11(x1,y1)、Q12(x1,y2)、Q21(x2,y1)、Q22(x2,y2)4点的值, 首先对其在x方向进行线性插值, 得到下列双线性方程:
然后在y方向进行线性插值, 得到下列公式:
由于图像双线性插值只会用相邻的4个点, 设相邻的4 个点为:f(Q11)=f(0,0) ,f(Q21)=f(0,1) ,f(Q12)=f(1,0),f(Q22)=f(1,1);则可得式(13)。
4 实验验证
本论述的初始图像集是通过多功能检测车采集得到的, 如图1所示, 多功能检测车由高清黑白面阵相机、线结构光激光器、高清3D工业相机、GNSS定位系统及嵌入式工业板卡计算机等核心元器件组成。由于每幅图上各部分的灰度值都不一样, 为了提取病害目标, 取得重叠交集φ, 去掉25%灰度值偏大和25%灰度值偏小的图像, 取剩余的50%的分割图像为最终的重叠交集φ。最后在MATLAB中采用双线性插值法溯源得到拟合路面的背景及病害目标。

图1 多功能检测车

图2 路面病害采集相机
为了验证灰度不均匀模型的可行性和适用性, 选取了G312 线古浪金三角至丰乐段路面工程进行路面自动化病害检测。G312线是甘肃交通运输的大动脉, 同时承担着青兰国家高速公路、福银国家高速公路和连霍国家高速公路的辅道和集散功能。其中G312 线古浪金三角至丰乐段公路改造工程是交通运输部确定的“十二五”国省干线改造的15条重点建设项目之一, 是连接兰州、永登、天祝、武威、永昌、金昌、山丹、张掖及新疆的重要路段。G312线古浪金三角至丰乐段路面工程路线起点位于武威市古浪县城金三角, 途经双塔、黄羊镇、谢河镇、武南镇、高坝镇、武威市、和平镇、永丰镇, 终点位于武威市丰乐镇与金昌市交界处, 路线全长97.948 km。
通过对G312 线古浪金三角至丰乐段路面工程进行路面自动化病害检测的过程中发现, 该线路部分路段存有纵向裂缝、横向裂缝、龟裂等沥青路面病害现象, 通过多功能智能检测车的病害图像采集, 利用灰度不均匀模型进行优化, 通过对比分析可以发现初始采集的病害图片在灰度不均匀模型的加持优化下, 有效消除了由于道路两旁树荫、标志牌及照相机曝光程度不同造成的图像灰度不均匀情况, 且对提高病害图像饱和度和清晰度有较好的应用成效。
图像处理的初始时期, 通过多功能智能检测车采集到的初始病害图像, 如图3所示。由图3可以清晰地发现, 图像由于道路旁其他物质存在的干扰导致采集的图片左边部分阴暗, 右边部分图像过于明亮, 这种情形会导致在后期通过病害识别软件处理病害时将灰度不均匀病害图像中间分割线识别成竖向裂缝, 致使病害识别软件在识别该图像时就会出现一条横向裂缝, 一条竖向裂缝, 导致路面病害增加, 影响数据结果, 最终导致错误的研判。

图3 初始病害图像
因此, 优化病害图像灰度不均匀性是非常必要的, 故按照前文的模型设计要求, 首先对初始病害图像的背景进行除噪, 得到只有病害的图像, 如图4所示。

图4 去除背景噪声后的病害图像
然后通过去除图像中25%灰度值偏大和25%灰度值偏小的图像, 取剩余的50%的分割图像为最终的重叠交集φ, 然后将取得的灰度均匀重叠集提高其饱和度, 使其清晰显示, 得到如图5所示图像。
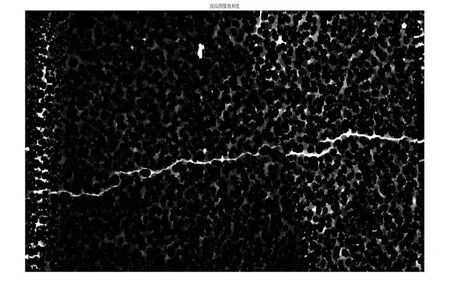
图5 增强重叠交集φ 饱和度的病害图像
最后采用双线性插值法溯源得到消除灰度不均匀现象拟合路面的背景及病害目标, 如图6所示。
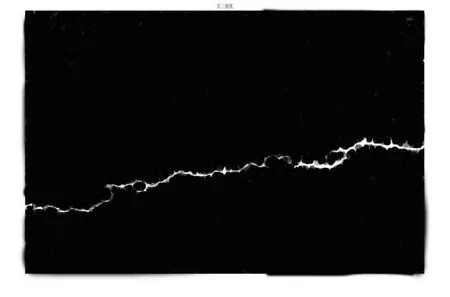
图6 利用双线性插值回归后的病害图像
5 结论
由图3 可知, 本论述中所采集的图片均由高清3D工业相机拍摄而成, 但由于其位置在车顶且倒置, 再者因为所采用的高清3D 工业相机需要在病害采集过程中不断的人为手动进行补光操作, 导致采集的图片呈现灰度不均匀现象, 故提出一种针对采集图像灰度不均匀性的处理方法。通过对病害图像去背景降噪, 然后求取灰度均匀部分的重叠交集φ取得灰度均匀集, 将取得的均匀集提高其饱和度, 使其清晰显示, 然后采用双线性插值法溯源得到拟合路面的背景及病害目标。试验验证显示, 本论述的算法应用对矫正病害图像灰度不均匀及提高图像饱和度和清晰度有较好的应用成效。
