基于横向稳定的减速变道轨迹与跟踪控制
2022-03-21徐佳晨祖炳锋周建伟董振鹏
徐佳晨, 祖炳锋, 周建伟, 董振鹏
(1.天津大学 内燃机研究所,天津 300072;2.天津大学 机械工程学院,天津 300072;3.天津特瑞捷动力科技有限公司,天津 300072)
0 引言
车道变换是自动驾驶车辆行驶过程中常见的工况,是一种重要的车辆避撞方式。研究表明,若前方道路遇到突发状况,转向避撞能比单独制动减少40%的碰撞概率[1]。同时在换道过程中,保证换道的稳定性至关重要,在换道轨迹规划中必须对横向加速度进行限制[2]。在换道轨迹跟踪过程中涉及到车辆的横向和纵向控制,由于车辆的非线性与时变特性,有关如何在保证横向稳定性的前提下,实现对规划轨迹准确跟踪的研究越来越受国内外研究学者的关注。
换道轨迹规划算法可分为图搜索、随机采样、动态优化和几何曲线等[3],其中几何曲线中的多项式曲线具有曲率连续且平滑、长度短和容易由边界条件确定表达式等优点[4]而被广泛应用。Zhang等[5]运用3次多项式规划轨迹,在成本函数中考虑了横向加速度的大小和换道时间,通过对交通状态的预测对轨迹进行动态再规划。Taehyun Shim等[6]为了规避障碍物,设计了基于6次多项式的运动轨迹规划器,通过参数优化确定无碰撞轨迹。杨博等[7]同样基于6次多项式,加入避撞和防侧倾条件,通过求解防侧倾评价函数确定轨迹。潘勇等[8]针对前车运动状态,建立基于车车协同不同交通工况下的车辆纵向避障系统的安全距离模型,并搭建仿真平台,并证明了有效性。然而上述研究中的变道轨迹均是在纵向速度不变的设定下进行,在实际工况下,为了在较短的距离内规避障碍物,同时保障横向的稳定性,大多情况下需要进行减速变道。
轨迹跟踪的方法一般有比例-积分-微分(Proportional-Integral-Derivative, PID)控制、模糊控制、滑模控制、模型预测控制(Model Predictive Control, MPC)等。对横纵向进行综合控制是近年来国内外的研究学者关注焦点。Chulho Choi等[9]通过非线性模型预测控制,以横纵向速度比率确定参考轨迹,输出前轮转角和需求加速度来进行轨迹跟踪。Alexander Katriniok等[10]将跟踪问题分解为速度跟踪和路径跟踪,通过车辆动力学模型并添加轮胎横纵向受力约束,实现了横纵向的协同运动。谢辉等[11]在横纵向上均采用模型预测控制,纵向控制器为横向控制器提供速度预测序列,实现了对变速过弯轨迹的跟踪。严明月等[12]运用多目标模糊逻辑决策来确定转向与制动控制器的功能分配系数,实现了转向与避撞协同的避撞控制。杨刚等提出了两车协同自动换道控制策略,根据车辆周围的运动信息,设计了车辆协同换道轨迹规划模型[13]。
针对某些工况下在固定距离内要实现变道的实际需求,本研究提出了一种在保证横向稳定性的前提下,利用多项式规划运动轨迹,并通过横纵向综合控制实现减速变道的方法。通过求解多项式,得到满足横向稳定性限制的纵向减速度,来确定横纵向运动轨迹。在纵向控制上,通过对制动缸压力的PI控制实现纵向速度的跟踪;横向控制上,根据模型预测控制输出前轮转角。通过仿真,对理论换道时间与实际换道时间转换系数进行了标定,得出其变化规律。通过对具体工况进行仿真模拟以验证该方法的可行性。
1 换道轨迹规划
车辆变道过程如图1所示,在固定坐标系下,以本车道方向为纵向,表示为X方向;以换道至相邻车道方向为横向,表示为Y方向。在车辆坐标系下车身的前向与侧向分别表示为x方向和y方向。本研究假设:(1)由于换道至相邻车道过程中车辆横摆角一般不超过10°,车辆沿车身侧向加速度(ay)与沿车道横向加速度(aY)差别小于2%,近似认为二者相等。(2)汽车在换道之前沿直线行驶,则初始的横向位移、横向速度以及横向加速度都为0。(3)相邻车道没有其他车干扰换道。(4)为保证安全,到达相应的纵向距离时,已完成横向换道。

图1 车辆变道示意图Fig.1 Schematic diagram of vehicle lane changing
在换道横纵向位移确定的情况下,对满足换道横向稳定性和转向机构极限约束下的横纵向速度进行规划,即横向换道所需时间和相应的纵向减速度。不同交通状况对驾驶员换道时间影响显著,其中交通情况主要影响汽车行驶速度[14]。
本研究横向位移取一个标准车道的宽度,即3.75 m。利用5次多项式表示横向位移:
Y(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5,
(1)
约束条件为:
(2)
(3)
横向稳定性的评价标准主要包括横向载荷转移率、侧倾角以及横向加速度等[15],相较于其它两种方法,横向加速度更加方便、直观,取横向加速度为评价指标。相关研究给出了维持稳定性的横向加速度限制标准[16-17],横向加速度要小于3~4 m/s2,为保证横向稳定性,取允许的横向加速度绝对值的最大值为3 m/s2。横向加速度表达式为:
(4)
对aY求最值得到:
(5)
(6)
则最小换道时间tfmin为:
(7)
对于多项式轨迹,位移由加速度进行二次积分得到,在换道初期,虽然横向加速度增长梯度较大,0.1 s内便超过1 m/s2,但是位移增长较为平缓,在换道轨迹跟踪开始时前轮转角不大,加之车辆惯性等物理因素的影响,使得实际加速度落后于理论计算值,而之后为了在换道时间内跟踪上期望轨迹,加速度峰值会增大。如图2所示,初始车速为100 km/h,以tfmin为换道时间进行匀速换道,虽然能够跟踪上期望轨迹,但是加速度峰值超过稳定值,且波动较大,易造成车辆失稳。中高速工况下,需增大换道时间,减小加速度峰值。
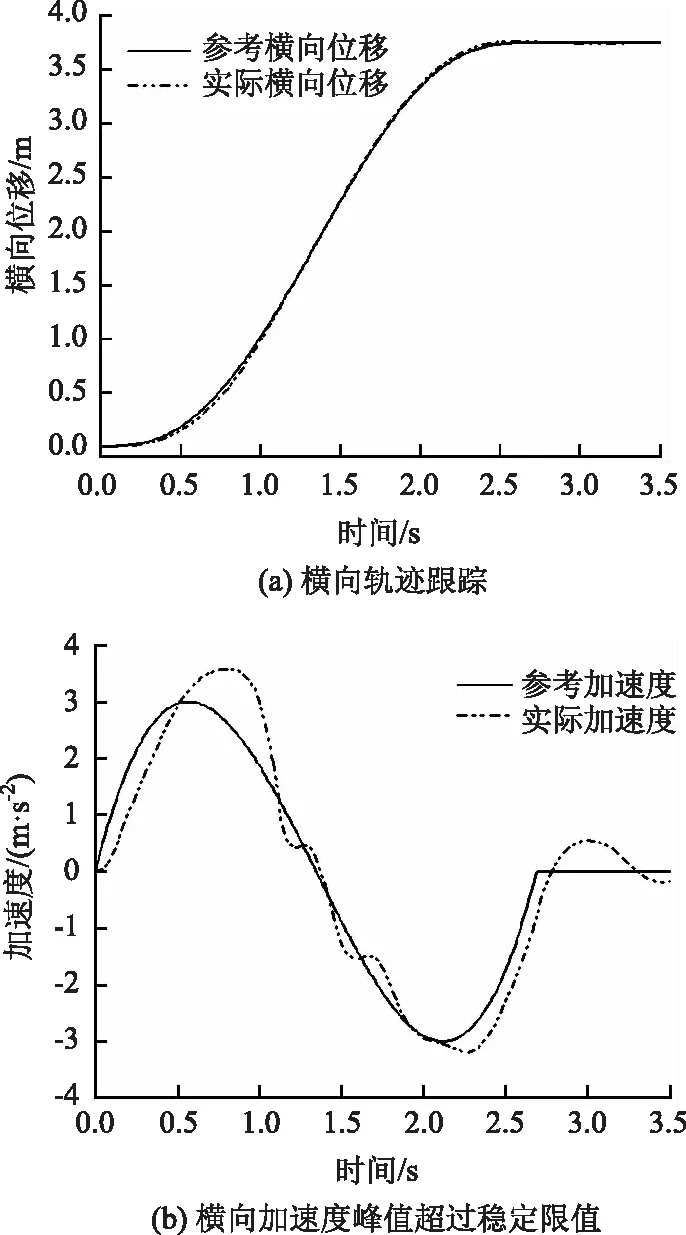
图2 tfmin时间内纵向100 km/h匀速变道Fig.2 Longitudinal uniform lane changing at 100 km/h within tfmin
低速工况下,参考式(18),在纵向速度较小时,要跟踪上横向速度,需要较大的前轮转角变化率,可能会超出车辆的机械限制,同样需要增大换道时间以使横向速度变化较为平缓。
故设置换道时间系数kf与车辆的实际最小换道时间关系为:
tmin=kftfmin,
(8)
式中,tmin为实际所需换道时间。kf具体数值由3.1节标定得到。
同时,tmin也是纵向运动D的最短时间。设纵向减速度为aX,由运动方程:
(9)
式中v0为车辆纵向初速度。求解出纵向需求减速度,若aX≥0,说明不需减速换道即可满足横向稳定性要求。若aX<0,则制动系统需提供制动力进行减速变道,本研究对减速变道的横纵向控制进行研究。
2 横纵向综合控制
本研究采取横纵向分层控制的方法,分别对车辆的制动和转向进行控制,原理如图3所示。将车辆需要换道的横纵向距离D,b以及初速度v0输入基于横向稳定性的轨迹规划器,通过查找Map图确定换道所需时间,进而确定纵向减速度需求aX dex和横向参考状态量γref,将aX dex输入纵向减速PI控制器,由动力学计算出的制动压力基础上,根据期望速度vdex与实际速度vreal的误差做PI调节,以稳定跟随车辆期望速度。横向MPC控制器根据实际状态量γreal与γref之间的误差控制前轮转角δ,以实现横向的轨迹跟踪。

图3 横纵向综合控制原理图Fig.3 Schematic diagram of horizontal and longitudinal integrated control
2.1 纵向控制
根据车辆纵向动力学公式,可得到车辆需求制动力矩:
FB=m|a|-Froll-Faero-Fgrade,
(10)
式中,m为整车质量;Froll,Faero,Fgrade分别为车辆滚动阻力、空气阻力和道路坡度阻力。在不考虑坡度的情况下,车辆滚动阻力为:
Froll=mgf,
(11)
式中f为滚动阻力系数。空气阻力为:
(12)
式中,ρ为空气密度,一般取1.225 8 kg/m3;Af为车辆的迎风面积;Cd为空气阻力系数;ur为相对速度,无风时为车辆速度。由制动力可以得到需求的制动压强:
(13)
式中,pb为主缸的制动压强;r为车轮的有效半径;j为制动力矩到主缸压强的转换系数,大小由车辆的制动系统决定。
纵向制动系统的目标是跟踪期望速度,车辆的制动涉及制动器的响应延迟、减速度逐渐减小到目标值等动态过程,且换道过程中沿车道的纵向速度与沿车身的前向速度存在一定差别,仅由pb难以稳定跟随目标速度,增加速度误差PI控制进行反馈校正。
verror=vref-vreal,
(14)
式中,vref,vreal,verror分别为车辆沿纵向的期望速度、实际速度与速度误差。离散形式的PI公式为:
(15)
式中,Δp为压强变化量;Kp与Ki分别为比例和积分系数。则最终的主缸压强p为:
p=pb+Δp。
(16)
2.2 横向控制
图4为前轮转向车辆单轨模型示意图,C为质心位置,在地面固定坐标系XOY下,车辆运动学方程为:
(17)

图4 车辆运动学模型Fig.4 Vehicle kinematics model

(18)
系统可视控制量为δ,状态量为γ(Y,φ)的控制系统,其一般形式为:

(19)
利用一阶泰勒展开式得到误差的线性表达式:
(20)
其简写形式为:

(21)

对于参考量,Yr由式(3)给出,φr为:
(22)
由匀减速运动公式得到:
(23)
将其带入式(22)得到:
(24)
联立(18),(24)可求得δr。由于实际前轮转角通过优化问题得到,对δr的准确性依赖不大,在前轮转角较小时,减小控制量的权重,将δr设为0也可得到精确的前轮转角值,减少了对δr的复杂求解。
由前向欧拉算法对式(21)进行离散化处理:

(25)
式中,T为采样时间;k为步长。
设定优化函数为:
(26)
δmin≤δ(k+i|t)≤δmax
Δδmin≤Δδ(k+i|t)≤Δδmax。
(27)
求解算法可参考文献[12],将求得的第1个控制增量Δδ(t)作用于系统,得到控制量δ(t):
δ(t)=δ(t-1)+Δδ(t)。
(28)
3 仿真标定与验证
采用Simulink与CarSim联合仿真平台对kf值进行标定以及验证横纵向控制算法的可行性,图3中的车辆模型由CarSim仿真,CarSim模型输出的横纵向速度与加速度等均已考虑了滑移、侧偏等因素等影响,减少了中高速下利用动力学求解真实值的过程,使得控制器中的运动学模型可以对中高速工况进行控制。轨迹规划、纵向减速PI控制、横向MPC控制由Matlab/Simulink完成。仿真车型为CS B-Class,Hatchback,相关参数见表1。

表1 车辆模型参数Tab.1 Vehicle model parameters
对于模型预测控制器,相关参数设置:采样时间T取0.01 s,预测步长取60,控制步长取30,松弛因子取10,权重Q,R,ρ分别取100,1,10前轮转角约束为[-25°, 25°],前轮转向最大角速度约为27.4°/s[15],则前轮转角增量约束为[-0.274°, 0.274°]。
3.1 kf的标定
横纵向的合力要在路面所能提供的附着力范围之内,即满足摩擦圆约束[15],道路坡度为0时:
(29)
车辆减速运动时,阻力的存在减小了轮胎的需求制动力,式中ad为阻力引起的车辆加速度的绝对值;μ为路面附着系数,在良好附着性路面;μ一般取0.8;k为限制轮胎摩擦力饱和的比例系数,一般k≤1,本研究取0.8。则满足横向最大加速度限制(aY_limit=3)的纵向减速度最大值约为5.5 m/s2。
对车辆初速度40~120 km/h,每隔10 km/h 采样,每个采样车速下,减速度区间为0~5.5 m/s2,每隔0.5 m/s2进行采样,对kf值进行标定。在满足轨迹精确跟随(换道完成时的横向位移误差小于0.1 m)与横向稳定性(|aY|的最大值与aY_limit之差小于aY_limit的2%)的前提下,记录最小kf值与相应的纵向换道距离,图5列出了部分车速下的kf值曲线。从图中可以看出,以初速度80 km/h 为界,速度更高或更低均会使kf升高。在侧偏角较小时,车辆侧向加速度与车身前向速度、前轮转角的关系为[8]:
(30)
联合式(17),随纵向车速的增高,u值也会增加,前轮转角的误差对横向加速度的影响增大,较小的波动就能引起横向加速度的剧烈变化,因而要增加换道时间,增强换道稳定性。而对于中低速工况,为跟踪上轨迹,需要较大的前轮转角变化率,可能会超过前轮角速度的极限,此时横向稳定性不再是限制条件,增加换道时间,是为了满足前轮角速度限制。
随着减速度的增大,由式(24)和图6,相同换道时间,减速度越大,纵向距离越短,换道横摆角增大,高速工况下导致横向加速度第一个峰值增大,中低速下超过前轮角速度限制,为能够稳定完成换道,各车速下的kf值均会上升。
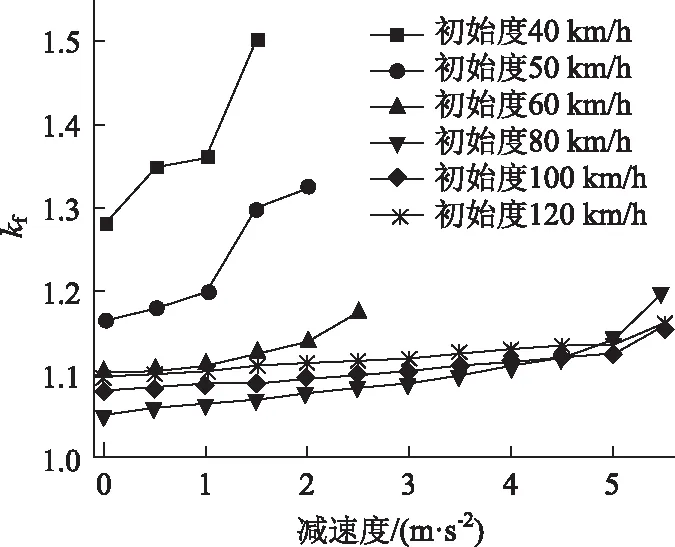
图5 各车速与减速度下的kf曲线Fig.5 kf curves at each speed and deceleration
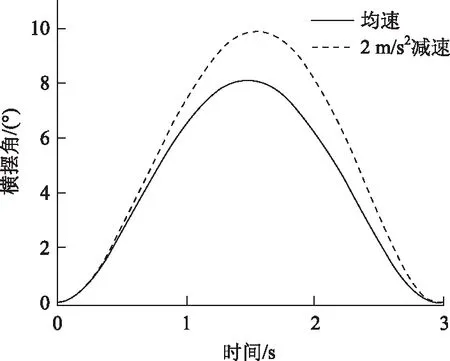
图6 初速度为60 km/h相同换道时间的横摆角Fig.6 Yaw angles in same lane changing time at 60 km/h initial speed
从图5可以看出,车速在80~120 km/h,kf与减速度有较好的线性关系,在40~60 km/h,受转向角速度限制等因素影响,kf增长幅度较大。初速度为40 ,50 ,60 km/h标定得到的减速度最大值分别为1.5 ,2 ,2.5 m/s2,减速度继续增大,kf则需要更大的增长量,计算得到的纵向距离反而会增大,因此未计入。
图7给出了在满足横向稳定性下的各车速匀速换道以及最小换道距离,可分为3个区域,匀速换道距离曲线及其以上区域为A区,即不需要减速便可实现稳定换道;匀速换道与最小换道距离曲线之间的B区为减速换道窗口区,即需要减速才能实现稳定换道。最小距离曲线之下的C区不能实现稳定换道。对于减速窗口区,低速时,匀速换道与最小距离换道相差较小,初速度为40 km/h时,二者的差距为5.6 m,若以避撞为意图,低速下单独制动比减速换道效果更好[18]。中高速下的减速换道窗口区则较大且均匀,80~120 km/h的匀速换道与最小距离换道之差的平均值为20.6 m,能够在较大范围内实现稳定的减速换道。将不同车速与距离下的kf值制作成Map图,实际应用时,根据车速及纵向距离插值得到kf。
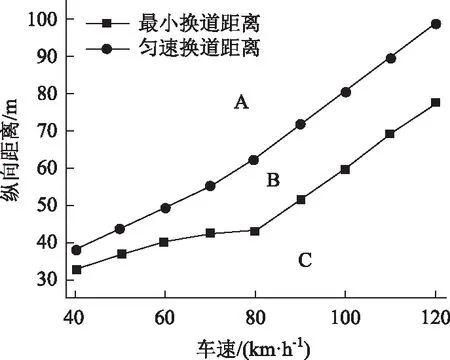
图7 各车速下适合减速换道的纵向距离区间Fig.7 Longitudinal distance interval suitable for deceleration and lane changing at each speed
3.2 车速与距离的仿真验证
对初始车速在100 km/h,换道纵向距离为70 m进行模拟仿真,此时需要减速才能完成稳定换道,通过插值得到kf值为1.103,相应的换道时间为2.96 s,需求的纵向减速度为2.8 m/s2,仿真结果如图8所示,跟踪误差均为参考值减实际值。在纵向上,受制动执行机构及车辆运动惯性的影响,减速度逐步增长至2.8 m/s2,期望速度与实际速度产生误差,基于速度误差的 PI调节起作用,制动压强增加,使得实际纵向速度快速跟踪上期望速度,在0.9 s 后纵向速度实现稳定跟随,换道过程中纵向位移误差绝对值不超过0.16 m。横向位移误差在[-0.02, 0.025] m 之间,换道完成时的误差值为-0.038 m,最大横向加速度为3.03 m/s2,与最大许用加速度的误差为1%,满足横向稳定性要求。横摆角的跟踪误差在[-0.9°, 0.5°]之间。在2.96 s时,纵向的换道完成精度为99.95%,横向换道的完成精度为99.67%。

图8 减速换道仿真结果Fig.8 Simulation result of deceleration and lane changing
4 结论
本研究提出了一种确定减速换道轨迹及横纵向综合控制方法,以横向加速度为横向稳定性评价标准,确定了在固定换道距离下的横纵向位移轨迹并通过纵向PI控制器和横向MPC控制器来跟踪轨迹,主要结论如下:
(1)由多项式轨迹求解的理论加速度与实际加速度存在误差,应增加理论计算的换道时间以保持横向稳定性和满足车辆转向角速度限制。
(2)对于车辆的曲线运动,以时间为关联,对横纵向进行分别控制,能起到精准的控制效果。
(3)在保持横向稳定性的前提下,中高速工况的减速换道窗口比低速工况大,减速换道在中高速工况下具有更大的避撞能力。
