基于改进SRCKF的固定单站无源定位算法
2022-03-21相飞华王杰贵
相飞华,王杰贵
(国防科技大学电子对抗学院,安徽 合肥 230037)
0 引言
无源定位系统因具有隐蔽性强、探测距离远、适用范围广等特点在电子对抗领域备受关注,而单站无源定位更是以其独特的优点引人注目[1-2]。长期以来,如何提高定位系统的精确性和实时性一直是研究的热点和难点。单站无源定位系统是典型的强非线性系统,因此非线性滤波问题成为单站无源定位技术研究的焦点之一。
常见的非线性估计算法有扩展卡尔曼滤波(extended Kalman filter, EKF)[3]及其衍生算法、无迹卡尔曼滤波(unscented Kalman filter, UKF)[4]等,但这些算法精度有限且都存在一定缺陷,对强非线性系统的滤波表现出明显的不适应性。近年来,容积卡尔曼滤波(cubature Kalman filter, CKF)[5-6]得到广泛应用,其采用球面径向容积规则,估计精度可达3阶,但滤波过程中存在矩阵求逆和分解运算,稳定性不易保证。平方根容积卡尔曼滤波(square-root cubature Kalman filter, SRCKF)通过正交三角分解(QR分解)引入协方差矩阵的平方根进行递推运算,保持了更新过程协方差矩阵的对称性和非负定性,滤波精度和稳定性更高。针对固定单站无源定位模型状态方程线性和观测方程非线性的特点,利用容积点进行加权近似会带来状态预测误差;在时间更新环节对SRCKF算法进行线性简化[7-8],避免了加权近似误差,数值精度和运算效率得到提高。
现有技术条件下,单站无源定位系统的参数测量精度有限[9],导致滤波跟踪效果不够理想。有研究分别将迭代思想运用到EKF、UKF和CKF算法中[10-12],充分利用量测信息,结果表明对于不同的滤波器,迭代运算都在一定程度上改善了滤波跟踪的效果。因此,本文在线性简化SRCKF算法基础上,引入迭代思想,进一步优化,形成了迭代简化改进的SRCKF算法。
1 改进的SRCKF算法
1.1 SRCKF算法
在CKF算法中,利用Cholesky分解代替QR分解,在递推滤波运算中引入协方差矩阵的平方根,就形成了SRCKF算法。SRCKF算法流程如下。由状态维数计算容积点和权值:
(1)
式(1)中,[1]=[I,-I],m=2n。
1)时间更新
(2)
(3)
(4)
(5)
(6)
式(6)中,Tria(·)表示矩阵QR分解。
(7)
(8)
2) 量测更新
(9)
Zi,k+1|k=hk+1(Xi,k+1|k)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
1.2 线性简化
考虑状态方程为线性时,对时间更新环节简化,通过状态转移矩阵直接求取状态变量和协方差矩阵一步预测值,避免求容积点误差,同时减少计算。
1) 状态向量的一步预测简化
(20)
2)协方差矩阵的一步预测简化
根据QR分解的定义可将式(6)写为:
(21)

(22)
(23)
将式(7)、式(8)代入式(23),有:
(24)
根据式(3)、式(4)和式(21),将式(24)写为:
(25)
根据式(1)可知:
(26)
再结合式(22),式(25)可表示为:
(27)
观察式(20)、式(27)可以发现,这两步与卡尔曼滤波算法的一步预测状态相同。
1.3 迭代算法
在卡尔曼滤波算法中,前一时刻状态和当前量测被用来修正当前状态的预测值,因此前一时刻状态的估计精度对以后时刻状态的精确性和稳定性有很大影响。在上节基础上引入迭代理论,形成迭代简化改进的SRCKF算法,核心思想是在前向滤波消除大量噪声的前提下,对量测更新过程进行迭代运算,充分利用最新量测信息,提高滤波估计精确度和稳定度。
2 基于改进SRCKF的固定单站无源定位算法
2.1 固定单站无源定位
目标辐射源做匀速直线运动时,固定单站无源定位二维平面几何关系图如图1。设固定单观测站在原点位置,目标辐射源的位置记为T(x,y),在k时刻,其相对于观测站O的径向距离为rk,方位角为βk。

图1 固定单站无源定位几何关系图Fig.1 Geometric relationship of fixed single station passive location system

Xk+1=FXk+GWk
(28)
观测方程可表示为:
Zk=h(Xk)+Vk
(29)
式(29)中,h(·)是状态向量到观测量的非线性变换函数,Vk表示量测噪声,是均值为零的高斯白噪声,其协方差矩阵为Rk。
(30)
2.2 算法流程
基于改进SRCKF的固定单站无源定位算法流程如下所示。
1)时间更新
(31)
2)量测更新

①计算量测一步预测
(32)
②计算新息协方差阵的平方根
(33)
(34)
③计算互协方差阵
(35)
(36)
④计算增益矩阵
(37)
⑤计算状态向量更新
(38)
⑥计算误差协方差阵平方根更新
(39)

3 仿真与分析
为检验改进算法的性能,进行仿真实验,并与文献[7]和文献[12]算法进行比较。采用相对距离误差(relative range error, RRE)描述算法性能,定义式为:
(40)
仿真条件设置:固定单观测站位于原点O处,目标辐射源做匀速直线运动,初始位置为(120,90) km,飞行速度为(-300,100) m/s,加速度扰动噪声为0.1 m/s2。辐射源信号载频为10 GHz,观测周期T=1 s,观测时长为200 s。设初始状态估计相对误差为20%,对观测量方位角、角速度和多普勒频率变化率,分别给定两组高低不同的测量精度:
进行100次Monte-Carlo实验,定位跟踪结束时刻RRE<5%,视本次实验收敛,否则发散。定位精度为滤波结束时RRE的统计平均值,且已剔除滤波发散次数。实验结果如图2、图3和表1所示。

图2 高观测精度条件下各算法性能比较Fig.2 Performance comparison of algorithms under high observation accuracy

图3 低观测精度条件下各算法性能比较Fig.3 Performance comparison of algorithms under low observation accuracy

表1 不同测量精度稳定性与计算效率比较Tab.1 Comparison of stability and calculation efficiency under different measurement accuracy
图2和图3显示了高低两种测量精度下三种算法的RRE曲线。测量精度较高时,三种算法收敛曲线都较为理想;测量精度较低时,各算法滤波精度也随之降低,收敛速度变慢。综合来看本文算法的定位精度最高,收敛速度最快。应注意,图中曲线是已剔除滤波发散实验的统计结果。由表1知,在低测量精度条件下,文献[7]算法和文献[12]算法收敛次数明显低于本文算法。
在测量精度较高时,三种算法均表现良好,收敛次数保持在较高水平;观测精度降低时,各算法的收敛次数都有所减少。容易看出,在不同测量精度条件下,本文法稳定性要优于文献[7]和文献[12]算法。计算效率方面,文献[7]算法单次递推时间最短,效率最高,本文算法次之,而文献[12]算法效率最低。究其原因,文献[7]算法对SRCKF进行时间更新的简化降低了运算开销;本文算法与文献[12]算法均引入了迭代算法,使得计算量增加,递推时间变长;与文献[12]算法相比,本文算法采取了与文献[7]算法相同的简化策略,在一定程度上建简化了计算,运算效率有所提升。
综上,本文算法在不同观测精度条件下的计算稳定度、定位精度表现优秀,收敛速度优于文献[12]算法,接近文献[7]算法。在实际定位中,参数测量精度较差而对定位精度的要求又较高,在满足实时性的条件下,增加计算量以提升滤波性能值得考虑。
此外,为了考察本文算法对初始状态估计误差的鲁棒性,将其与CKF算法、SRCKF算法进行比较。在观测精度2)条件下,初始状态估计相对误差从0到100%等间隔取11组值,分别做100次Monte-Carlo实验,滤波结束时RRE的统计平均值如图4所示。
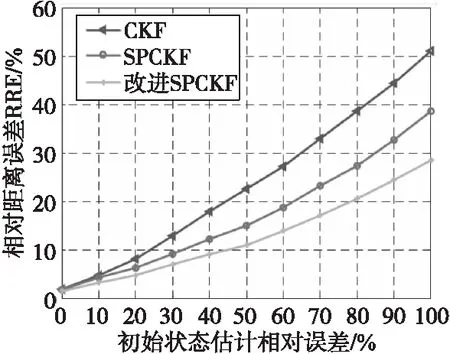
图4 各算法鲁棒性比较Fig.4 Comparison of Rbustness of algorithms
可以看出,随着初始状态相对估计误差逐渐增大,三种算法定位精度均逐渐降低。CKF算法对初始值相对误差最为敏感,定位误差上升最快;SRCKF算法次之;而本文算法定位误差上升最慢,对初始值估计相对误差变化最不敏感,表明了其良好的鲁棒性。在实际跟踪定位中,更注重单次滤波的稳定性,因此本文算法表现更好。
4 结论
本文提出基于改进SRCKF的固定单站无源定位算法,该算法在时间更新环节进行线性简化,避免求解容积点,改善了实时性和稳定性;同时引入迭代理论,充分利用最新测量信息,保证滤波数值稳定性,提高了定位跟踪的精度。本文算法在固定单站无源定位系统的工程化方面具有实践意义,同时也可应用到其他非线性滤波领域。
