靠泊船舶的多点离岸距离提取技术
2022-03-19李颖卢晓东陈晨
李颖, 卢晓东, 陈晨
(大连海事大学 航海学院,辽宁 大连 116026)
传统的船舶靠泊中,船舶靠泊分为自力靠泊、拖轮协助靠泊、智能靠泊3种方式。自力靠泊主要依靠船舶自身控制设备进行靠泊,仅适合在良好气象条件下的小型船舶;拖轮协助靠泊主要依靠船舶和拖轮的配合进行靠泊,是现在中大型船舶靠泊的主流方式;智能靠泊主要依靠对传入船岸距离信息的分析判断,对船舶和拖轮进行控制操纵,现在正处在探索实验阶段[1-3]。但无论哪种方式,船泊在靠泊阶段都必须精确地确定船岸距离信息。因为当船舶以低速接近码头时,舵效减弱,更易受风、流的影响,容易失速或靠泊角度过大,使平行靠泊执行起来更加复杂,要想避免船舶碰撞,船舶必须跟船岸距离信息尽可能接近平行靠泊,同时保持稳定缓慢的靠泊速度[4]。传统的船舶靠泊主要依靠引航员、船长的经验对船岸之间的距离信息进行估计,容易产生较大的偏差,而越来越大型化船舶在港口操纵的难度也逐渐增加,偏差所带来的危害也不断增加,随之而来的就是越来越高的靠泊事故率[5-6]。
港口的典型非接触式测距方法有激光测距、雷达测距、超声波测距等。雷达测距在恶劣、复杂的环境下,能进行近距离、高精度测量,但容易受电磁波干扰;超声波测距适用范围广、分辨率高、成本低、不受烟雾等因素的影响,但其测距作用距离较短[7-8]。激光测距具有高精度、高亮度、高效率、高更新率、高视觉可用性,还有单色性、方向性、相干性,且对云雾有一定穿透能力,抗干扰能力强[8-13],适合港口复杂的测量环境。
早期利用激光技术来进行船岸的测距,虽然检测精度较高,但是点式激光寻找目标困难,近年来,三维激光设备快速发展,一定程度解决了点式激光检测方法寻找目标难的问题,并能够提取船岸部分距离信息,但其获取的点云数据处理方法不具有普适性,所提取船岸距离信息不够全面,且需要大量的人工操作[14-15]。本文设计了基于激光三维点云对船舶多点离岸距离的信息提取模型。
1 船舶三维点云数据的获取
三维激光扫描技术是一种先进的全自动、高精度立体扫描技术,不受光照限制,利用激光测距原理,能够不接触被测物体,高速地获取测量对象表面密集的空间信息,快速生成复杂场景的三维点云模型[16],又被为“实景复制技术”。
近年来,脉冲式设备的点云获取速度达到5×104点/s以上,相位式设备的点云获取速度达到50×104点/s以上[17],徕卡公司生产的新一代超高速三维激光扫描系统的扫描速率达到了100×104点/s,能在短时间获取大量有效的点云数据。此外,以无人机为平台的轻小型设备迅速发展,Riegl公司研制的集成VUX的低空无人旋翼机扫描系统、测绘遥感信息工程国家重点实验室研制的低空无人直升机扫描系统Heli-Mapping的出现[18],能够在多角度对船舶进行数据的采集,一定程度上解决了单一视角、单一平台的观测范围有限的问题,能够提供物体更加全面、精确的三维点云信息[19]。对于船舶三维点云数据的获取,测量时要做仪器的检查,积极分析外部环境,规避影响因素,强化人员操作,实现仪器测量的专业性,减小测量误差[20]。如图1所示,将设备尽量安置在靠泊码头泊位岸基的中间边缘处,使得设备视角中心线位于靠泊船舶的船中位置,这样有利于最大化三维激光设备的视野范围,获取尽量多有效的船舶点云数据。

图1 系泊时的“育鲲轮”Fig.1 “YU KUN” at mooring
2 船舶多点离岸距离的信息提取
本文基于靠泊船舶的激光点云数据的特点,设计了一种靠泊船舶的多点离岸距离信息提取模型,该模型更新一帧的船岸距离信息的流程主要分为信息输入、点云预处理、距离信息提取、信息输出4个步骤。
2.1 船舶三维点云数据的预处理
2.1.1 点云数据的坐标转换
由于很多现实的条件限制,原始点云数据的视点并不是理想的视点,以三维激光设备视点为基准的原始数据坐标系需要进行坐标转化。如图2所示,首先将实际三维激光设备的坐标系遵循右手法则,分别绕z轴、y轴、x轴进行旋转α°、β°、γ°。即坐标系上的点云坐标遵循左手法则,分别绕z轴、y轴、x轴进行旋转α°、β°、γ°,然后将旋转后的坐标系延z轴负方向、x轴正方向、y轴正方向平移Δz、Δx、Δy,即坐标系上的点云坐标延z轴正方向、x轴正方向、y轴正方向平移Δz、-Δx、-Δy,使理想o与岸基线中点重合,理想xoy面与码头岸基平面重合,理想xoz面与码头岸基邻水侧面重合,理想yoz面与码头水域中线面重合,就此完成了点云数据从设备坐标系到理想坐标系的转换。实际坐标系的点preal(p=(px,py,pz))与理想坐标系的点pideal能够通过矩阵实现相互的旋转变换。
pideal与preal的转换关系为:
(1)
2.1.2 点云数据精简
随着三维激光设备不断地发展,最终获得点云数据量越来越多,存在着大量的冗余数据。例如岸基上的固定设施的点云数据,这些点云数据对于船舶多点离岸距离的获取会起到反作用。如图3所示,精简前有I个点云数据,其中有大量的冗余,通过设置泊位的空间范围(xb min,xb max)、(yb min,yb max)、(zb min,zb max),将I个点云数据精简为J个点云数据,减少占用了计算机内存,提高后续点云数据处理的速度增加数据提取的时效性。
(2)

图2 设备坐标系到理想坐标系的转换Fig.2 Transformation from the device coordinates to the ideal coordinates

图3 船舶点云数据精简前后结果Fig.3 Raw point cloud date and simplified point cloud data of the ship
2.2 船舶三维点云数据的处理及输出
2.2.1 点云数据的切割
船舶为减小航行阻力,船壳被设计成流线型,因此船壳上的点云数据连续性较好,不容易出现局部的点云数据缺失,但是船壳曲率大(艏舷等)处、近水面处,容易出现大片的点云缺失;主甲板上的上层建筑表面非流线型,且有玻璃等影响因素,点云数据容易局部缺失。为在尽可能小的点云处理范围内,获取尽可能全面的船舶多点离岸距离信息,理想的点云处理范围为主甲板下方的船壳附近的点云数据和船舯处的点云数据,但是不同吨位、类型的船舶主甲板的高度和船舯处位置并不是一个固定的值。为尽可能解决上述问题,本文在虚拟边缘法[21]的基础上,设计了船舶点云条状切割法,方法将靠泊船舶点云数据等分为若干区域,点云数量多的区域更可能包含更丰富船舶离岸距离信息,也就是更可能为理想的点云处理区域。
点云条状切割法(图4)步骤如下:
黍子对土壤和茬口要求不严,除严重盐碱地及低洼易涝地以外均可种植。在粘性土壤种黍子,由于土壤结构紧密,扎根困难,加之黍粒小,内含营养物质少,造成缺苗或死苗现象,但这种土壤保水保肥力强,对黍子后期生长有利。沙性土壤结构疏松,土温上升快,利于黍苗顶土,较适宜黍子生长,但后期易脱肥旱哀,要加强肥料供应。
1)设定理想点云数据处理数量的切割阈值r(r∈R+)、间距l(l∈R+)、子间隔系数c(c∈R+),确定初始点云切割区间[tl,th]。
2)船舶精简后的J个点云数据沿坐标轴方向按等间距l分为K份,各区域的点云数量为ak,选取点云数量为M的区域作为候选点云范围:
M=maxak,k=1,2,…,K
3)M

图4 船舶点云条状切割法的流程Fig.4 Flow chart of the strip-cutting method of point cloud data of the ship
2.2.2 点云数据的去噪
由于设备精度、操作者的经验、环境因素等带来的影响,点云数据中不可避免地会出现一些噪点,这些点夹杂在点云处理范围内,会让船长、引航员、智能靠泊系统对船舶的方位距离信息产生误判断,所以要对船舶点云数据去噪,将噪点剔除。其中弦高差法[22]、统计滤波法[23]、半径滤波法[24]对于点云有良好的去噪效果,而一个好的点云降噪算法应该是简洁的、高效的、有较强鲁棒性的,弦高差法在点云起始点为噪点情况下会将大量噪点保留,正常点云剔除;统计滤波法、半径滤波法则以机器学习的经典算法K近邻法为基础,统计滤波法计算每个点到附近的点的欧氏距离,半径滤波法计算每点附近的一定半径的球体内的点云数量,2种方法对每点计算开销较大。由于船壳是流线型的,相近的点云的py应该是渐变的,当出现框内py剧烈变化的点云时,大概率就是离群噪点,同时,离群噪点的数量远少于船舶点云的数量,根据以上离群噪点和船舶点云的特点设计了动态中点去噪法。
动态中点去噪法(图5)的步骤如下:
1)设定去噪组容量B,阈值系数f(f∈R+);
2)将点云范围内的点云数据按照pt(t=x,z)值进行升序排列,将数据分成N组,第N组所缺数据向前补齐;


s.t.n∈{1,2,…,N}
ε=fDa
2.2.3 点云数据的筛选
降噪后的靠泊船舶点云数据,邻近2点间隔可能只有厘米级,对船长、引航员、智能靠泊系统来说,点云数据仍不够直观,仍需要进一步的处理。采用等距离筛选法,能够大大减少数据的密度,使得船舶多点离岸信息点云能够在合适距离,减少信息重复阅读,加快船长、引航员、自动化靠泊系统对船岸方位距离的判断。
如图6所示,点云数据的等距离筛选步骤如下:
1)设定t(t=x,z)方向的等距离差Dt。
2)从降噪后点云按照pt进行降序排列,从tmax向坐标轴的负方向方向等距离取点。距离外的第一个点选取点,被选取点自动成为新距离起算点;没有新的距离起算点时,选取此时范围内的tmin点作为点云数据结束点。
3)筛选后的点云数据按t轴方向降序输出。
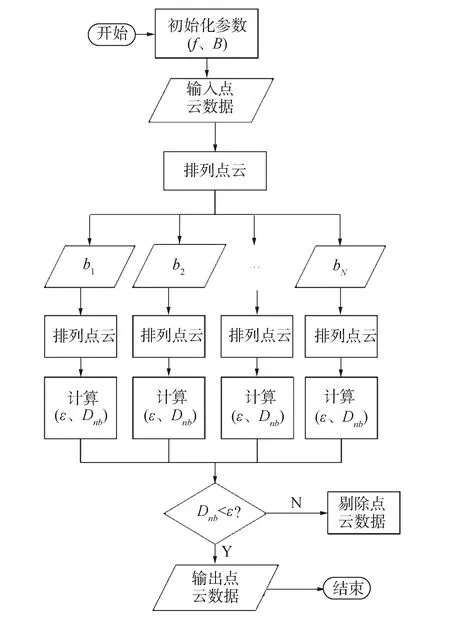
图5 动态中点去噪法的流程Fig.5 Flow chart of the dynamic mid-point denoising method
3 应用实例分析
为了验证本文提出的模型的有效性,采用对“海洋岛”号客滚船的靠泊点云数据进行实验验证。船舶点云数据经过预处理后,首先运用船舶点云条状切割法确定船舶点云处理范围,设置初始z轴切割间隔lz=1 m,子间隔系数cz=0.1,z轴点云切割阈值rz=500,初始x轴切割间隔lx=10 m,子间隔系数cx=0.1,x轴点云切割阈值rx=200,切割效果如图7所示,最终的点云处理范围避开了船舶点云缺失处,能够自动确定合适的船舶点云数据处理范围。
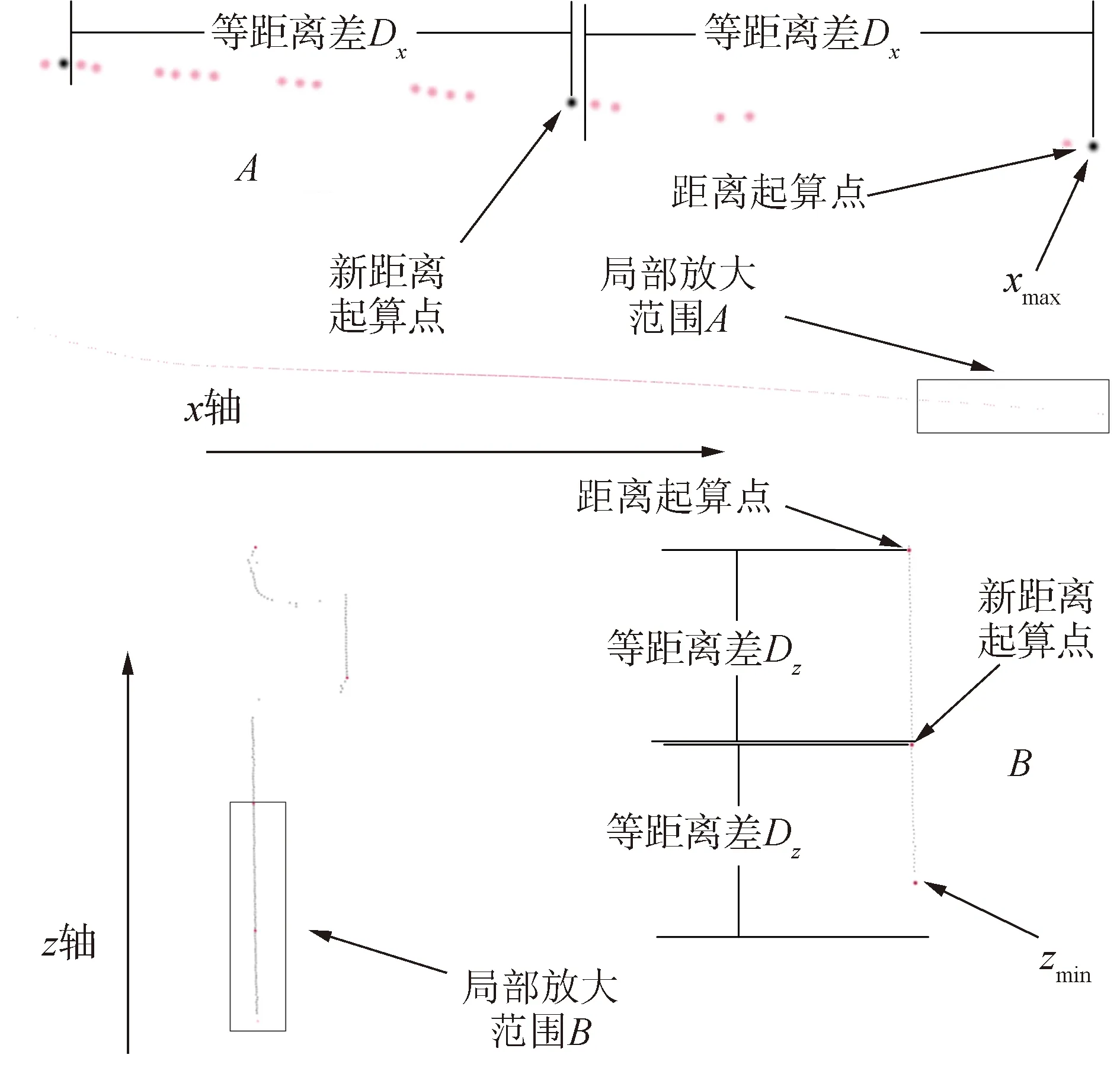
图6 点云数据的等距离筛选Fig.6 Isometric filtering method for point cloud data
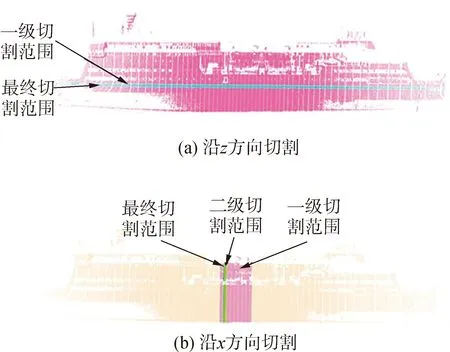
图7 船舶点云数据的切割过程Fig.7 The cutting process of ship point cloud data
然后通过动态中值去噪法剔除点云数据范围内的噪点,去噪组容量B=3,去噪阈值系数f=5,沿pz方向切割的点云数据未发现潜在噪点,沿px方向切割的点云数据的Dnb和去噪阈值ε的数值关系如图8所示,绝大部分的点的Dnb远小于去噪阈值ε,最终剔除了6个潜在噪点。
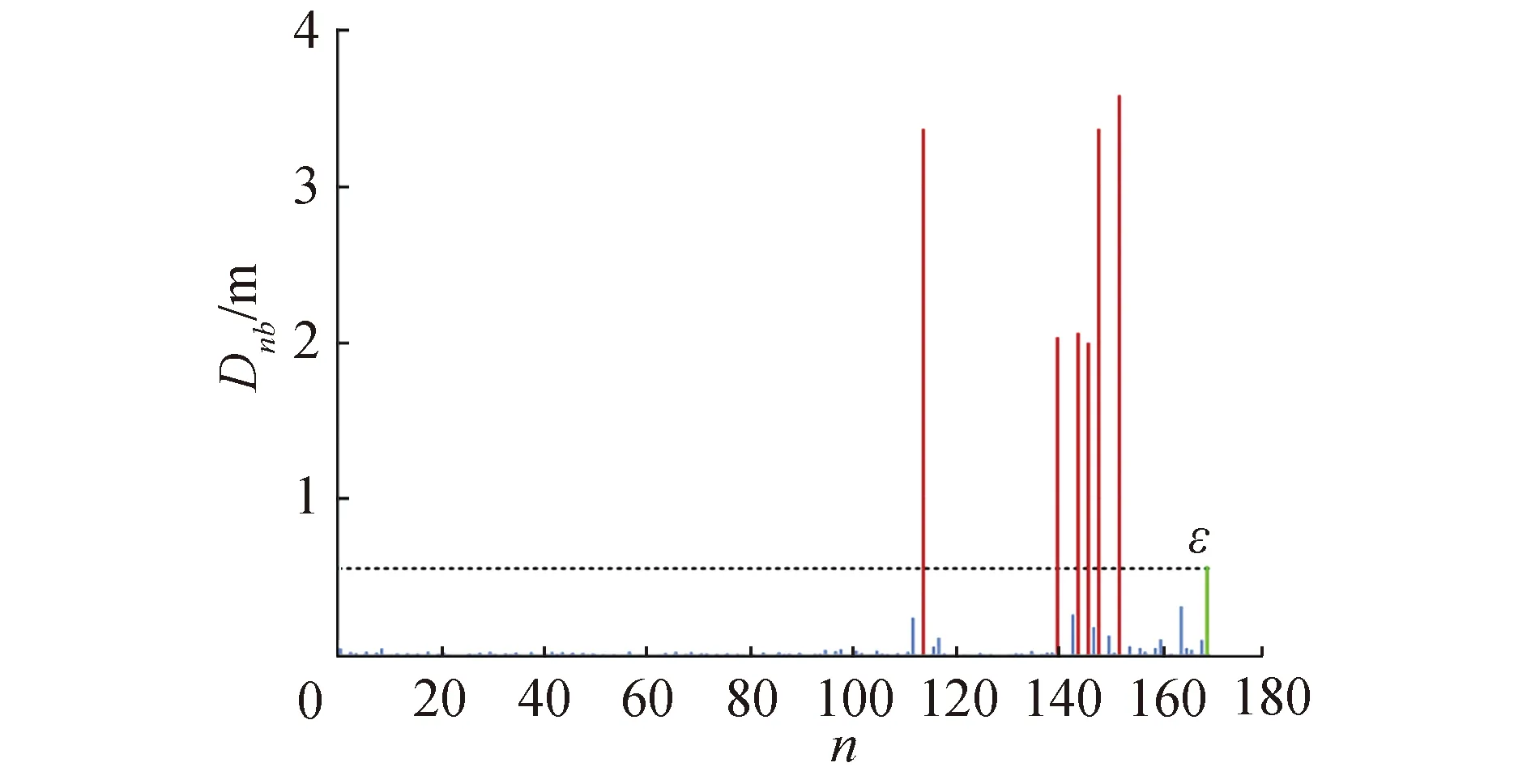
图8 Dnb与阈值ε的关系Fig.8 The relationship between Dnb and the threshold ε

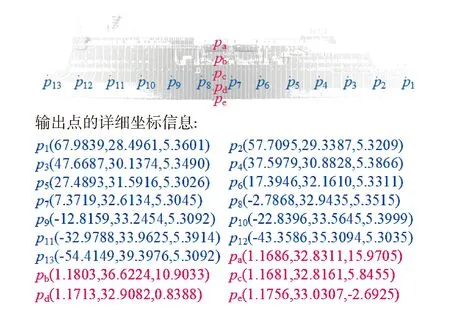
图9 输出点位置的可视化Fig.9 Visualization of output point positions
4 结论
1)本文建立了船舶多点离岸距离提取模型,将三维激光设备获取的靠泊船舶点云数据通过预处理、距离提取、信息输出等过程,最后提取出船舶多点离岸距离信息。
2)本文通过实验结果表明,模型能够比较全面、精确的提取船舶不同位置的距离信息,可视化后的距离信息能更好了解船舶相对于码头岸基的方位、姿态、位置等信息。
3)本文提取的多点离岸距离信息,能帮助对靠泊作业进行调整,使船舶更近似平行靠泊,靠泊位置更接近码头水域中部,留出靠泊船舶与码头岸基、岸基上的基础设施的安全距离余量,从而提高船舶靠泊的安全系数。
