基于区域划分的DBN分类及其在舰船目标识别中的应用*
2022-03-17石钊铭
石钊铭
(海装武汉局驻武汉地区第四军事代表室 武汉 430205)
1 引言
深度学习(Deep Learning)作为新兴智能技术方法,相对于传统的结构化舰船目标识别方法一般要经过特征提取,特征选择(属性约简)和分类识别三大步骤而言,大大简化了识别步骤,它具有可自主学习特征、可直接输入图像等优点,避免了特征提取的主观性,提高了识别精度,获得了良好的识别效果。例如Lü等将DBN模型用于遥感图像的分类处理中[1],Lü等设计了基于深度学习的层次分类模型[2],实验结果表明基于DBN模型的方法可以取得较好的分类效果。近几年,DBN模型作为深度学习的一个典型模型,其在手写数字识别[3]、图像处理[4]等领域得到了广泛应用。但DBN模型忽略了图像的局部结构[5],且其输入像素的邻域一般取实验值或经验值,缺乏理论分析,也没有考虑算法的时间复杂度。为此,本文提出了一种基于像素灰度级区域划分的图像局部空间灰度信息表征方法,丰富和完善了模型的输入变量信息,在此基础上,构建了基于局部区域划分的DBN目标分类模型,并结合仿真实验验证算法的时效性。
2 算法描述及分类识别模型
2.1 算法描述
本文算法流程如图1所示。针对基于局部空间灰度的输入像素,算法采用基于像素灰度级区域划分的思想进行处理;针对目标分类方法,算法采用DBN模型进行分类。算法在进行舰船目标分类识别时,采用“局部-整体”的计算原则,即首先在分组划分后的每块区域内进行一次处理,然后在目标整体空间内进行二次处理,理论分析表明,该算法降低了时间复杂度,提升了目标的识别速度。
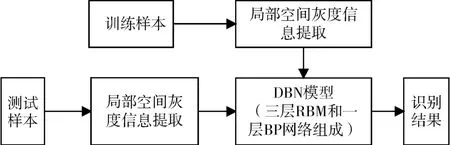
图1 算法流程图
2.2 基于像素灰度级划分的局部空间信息
借鉴文献[6]的像素非局部空间灰度信息:利用与图像像素具有相似邻域结构的像素来获取该像素的空间信息,这种空间信息称为像素的非局部空间灰度信息。显然,对于某像素,利用与其具有相似邻域结构的像素来获得它的空间信息要比仅仅利用其邻域像素更为准确。为此,本文提出了基于像素局部邻域结构信息,其与某像素的灰度信息一起构成一个二元组,作为DBN模型的输入项。为方便理解区域划分的思想,下面给出局部区域的概念。
给定一个数据区间R,假设共有d维,将第i维空间划分成ni个小区间段,且将这些小区间构成的区间记做 Ri,则区间 Ri被笛卡尔集划分成 n1×n2×…×nl个局部区域单元,则某个区间单元可以用其每小区间段在各维上的对应位置所组成的d维向量来唯一标识,如区间M可标识为,这里以二维空间为例进行说明,如图2所示。

图2 区域划分示意图
假设图像I(x,y)的图像灰度级为L,二维直方图Ω被划分成M组M×N个矩形区域,每组含有N(N=L/M)个像素灰度级,每个矩形区域含有N×N个像素点。在每个矩形区域内,对于每一个像素i,灰度为 fi。定义以其为中心,大小为Size×Size的搜索窗口wi,在该搜索窗口中,计算像素i的局部空间灰度,公式表示如下:
其中,λi表示权值,为归一化项,gj表示该搜索窗口内像素 j的灰度值。λi的计算公式如下:
基于上,某像素的局部空间灰度信息是搜索窗口内所有像素灰度值进行加权平均计算获得的,而权值的大小表达了某像素与搜索窗口内像素的邻域结构的相似程度,其值越大,表明其与邻域结构越相似。
针对二维直方图图像,其传统分组方法的时间复杂度一般为O(L)(L表示图像灰度级大小)。为降低算法的时间复杂度,下面给出基于像素灰度级的区域划分标准。假设参与计算的像素点个数为Num,则在区域划分的基础上,采用“局部-整体”的计算方式,Num的计算公式为
此外,对于搜索窗口大小Size的取值,一般设置为奇数,且Size<N。
2.3 DBN模型
参考文献[1],本文将三层RBM网络和一层BP网络组成的DBN模型作为分类识别部分的推理模型。其中,RBM网络示意图表示如下:

图3 RBM示意图
RBM模型所蕴含的能量函数表示为
由于本文所采用的可见层之间的神经元和隐含层之间的神经元没有连接,因此各个可见层和隐含层的节点的激活状态是条件独立的。因此,当给定隐含层节点的状态时,第i个可见层节点的激活概率表示为
上式中,σ()x亦为逻辑斯蒂函数。
同理可得,第 j个可见层节点的激活概率可表示为
参考上述给定公式,对最大对数似然函数求导,最后根据对比离散度[7]得到各个参数的更新规则:为训练数据集对应分布的数学期望值,
针对BP分类网络层,假设第i个节点的实际输出值为oi,数学期望输出值为di,则灵敏度δ的计算公式记做:
那么对于第k个隐含层,灵敏度δ的计算公式为
故对于模型第k个层的网络权值,可得:
DBN模型首先将输入像素二元组数据转换为一维数据,然后采用迭代的方式进行批训练,训练完毕后,通过BP网络向前传播计算得到样本所在的类别索引,最终得到输入数据与类标值的非线性映射关系,完成目标分类识别。
3 实验分析
实验对象为从谷歌地图中随机选取的航空遥感影像。实验数据同文献[8],如图所示。本次实验数据分为6个舰种,像素灰度级在0~255之间。在实验过程中,通过对舰船目标的源图像做灰度、尺寸缩放等处理得到大量的实验样本,每个舰种1000幅,共计6000幅。开发工具采用Matlab.2008,实验环境为Windows操作系统,具体配置为Intel(R)Pentium(R)4 CPU 3.00 GHz。

图4 目标图像切片数据
为验证该模型的识别性能,采用如下计算方式[9],公式如下:
其中,yic表示算法得出的计算结果,tic表示样本的真实结果,且在该算法中,做如下规定处理:若某样本Vi所属类别为 Lc,则tic=1;否则,tic=0,同理,对yic的规定处理亦如此。
为验证本模型的性能,将本文DBN模型的实验结果分别与K近邻算法(KNN)[10]、支持向量机算法(SVM)[11]、DBN模型[12]的实验结果进行比较。其中,本次DBN模型和文献[10]的DBN模型的实验参数设置为迭代次数为50,学习率ε=0.05,最小样本数量min-batch=100。
本文选做8组实验,8组实验分别记作组1、2、3、4、5、6、7和8,且每组实验的训练样本为从6类舰种中随机抽取的200、300、400、500、600、700、800、900数量的实验样本,其余的作为测试样本使用,本实验累计重复10次,并将每次实验的平均值作为每组实验的最终实验结果,实验数据如下表所示。
由上表不难看出:上述算法的平均识别率大致呈递增的方式增长,基于DBN模型的分类性能优于传统的结构化学习方法,而对于本文模型较DBN模型而言,其组6、7、8、9实验数据进一步表明,随着训练样本数量的逐步增多,其分类性能逐步趋于完善,其识别能力愈来愈高。

表1 实验数据(I)

表2 实验数据(II)
4 结语
针对舰船目标分类识别问题,研究提出了基于像素灰度级区域划分的图像局部空间灰度信息表征方法,该方法运用区域划分的分组思想计算像素灰度信息,降低了算法的时间复杂度,大大减少了算法的运算量;提出了基于区域划分的DBN分类模型,首先将元素的局部邻域结构信息与其灰度信息一起构成一个二元组作为该模型的输入项,然后采用由三层RBM网络和一层有监督的反向传播功能的BP网络所组成的DNB模型进行样本分类训练。通过对模型输入特征和样本初始化处理,提升了模型的分类性能。仿真实验表明,本研究对今后基于光学遥感图像的舰船目标识别方法的研究具有一定的理论意义及应用价值。