柔性超级电容器在水下微型仿生鱼上的应用研究*
2022-03-17魏霄冉王鹏真苏琪彬韦定江张克伟
魏霄冉 王鹏真 苏琪彬 韦定江 张克伟
(1.中国人民解放军国防科技大学军事基础教育学院 长沙 410073)(2.青岛大学材料科学与工程学院 青岛 266017)(3.海军大连舰艇学院 大连 116018)
1 引言
仿生鱼是一种典型的水下移动机器人,目前在国内外广泛应用于水质监测、海洋自然灾害预防等民用领域,此外,其隐蔽性与灵活性使得其在军事领域也具有重要价值[1]。目前仿生鱼在军事方面应用较少,原因在于仿生鱼的推进运动方式尚不成熟,其动力推进系统无法满足货运、侦察、打击一体化的要求,只能通过扩大仿生鱼体积来平衡作战需求,这势必会影响仿生鱼的机动性与隐蔽性。因此,为提升仿生鱼动力系统循环效率从而提高的续航能力,且保留其体积小、灵活性高的特点,本文提出一种具有优异电化学性能,并且柔性高的纤维电极材料,将其应用于微型仿生鱼的电力系统,可提升仿生鱼的续航能力,满足仿生鱼在军用反蛙人作战与区域侦察拒止等方面的需求。
受限于外形大小,微型仿生机器鱼应选择小体积、轻质量、功率密度高的动力源,来实现高静音特性、高可靠性、高灵活性。目前已经应用在仿生鱼上的两种推进系统中,传统燃油机推进系统多适用于具有长航程、长航时作战的需求的中大型无人艇,但由于其排放恶化、噪声大[2]不适用于微型仿生鱼。相较之下,电力推进方式具有高体积功率密度,节能无污染的优势。电推进系统所搭载的能源需要具有高能量转换效率、低排放的特点。与传统蓄电池相比,超级电容器作为一种功能性储能设备,具有快速可重复充电的优势。电极材料很大程度上影响并决定了电容器的整体性能。电极材料的充放电过程中包含一些具有不同的弛豫时间(τ)的弛豫子过程或者说是基决速步骤(Element Rate Determining Sub-processes,ERDSPs),这些子过程对应着的动力学机制,决定了电容器的最终性能[3]。本文在之前的研究基础上提出了基于电容器能源推进的微型仿生鱼电力系统。在排水量不变的情况下,通过柔性纤维电极材料可提升电容器的动力学性能、通过闭式循环可提升仿生鱼的供电效率,从而实现微型仿生鱼作战性能的提高。
电极材料作为超级电容器的核心组成部分之一,其性能直接决定了器件的整体性能。电极材料主要分为双电层碳基材料和赝电容材料[4]。碳基材料是一种优秀的活性材料,但由于其比电容低、可选择性低,因此相比于赝电容材料目前应用较少。本文详细介绍一种新型海藻多糖/墨水/聚呲咯复合纤维(AF@Ink@PPy)赝电容电极材料,能量密度高、发展潜力大。海藻纤维的溶胀保证了表面墨水和聚吡咯的有效生长,通过法拉第反应引入了额外的赝电容,有利于电子/离子快速转移,实现对赝电容材料聚吡咯的高效利用,从而改善了电荷输运。研究结果表明,该纤维电极在1 mA/cm2和0.1 mA cm-1电流密度下,比电容可达417.5mF cm-2和32.1 mF cm-1,表现出优异的电化学性能,并且具有良好的柔韧性。这是目前最先进的纤维形状的超级电容器材料之一,利用该电极材料高能量密度、低成本、可再生的特性,得到了具有多航程、灵活性高的微型仿生鱼;也推动了柔性储能装置在无人装备领域的应用。
2 水下微型仿生鱼概述
2.1 微型仿生鱼的国内外研究现状
民用方面,2021年下半年,某型仿蝠鲼柔体潜水器完成了深海海试,某型仿狮子鱼软体机器鱼实现了在马里亚纳海沟的使用,目前国内外广泛应用于养殖鱼捕捞、油船监测、生物观察和资源探索等领域。近些年,仿生鱼逐步向仿生软体机器鱼等方向发展。
军用方面,仿生鱼可结合侧线感知系统、水下通信组网、群体仿生等多种先进技术,实现水下集群作战。此外,仿生鱼游动时可较好地还原水体环境,噪音低,机动性高,能满足军事隐蔽的作战需求,世界各国都将其作为未来重点研发军事装备之一。
目前国外仿生鱼研究已经较为成熟,不仅推进系统可以满足基本需求,传感器配置也较为先进,国内对仿生鱼的研究处于起步阶段,相较于发达国家仍有差距,仍需大量研究。一方面是继续推进动力系统和外形设计的升级,确保在装载特种作战设备后仍能保持较高的机动性和隐蔽性;另一方面是对侦察与打击设备进行微型化改造,构建集成化搭载平台,配合蛙人及岸基(舰载)平台进行特种作战。综上,仿生鱼在未来数十年的特种作战中将致力于实现察打一体、兼顾蛙人伴随等多样化任务,遂具备初步的半自主作战能力。
2.2 柔性超级电容器在仿生鱼电力推进系统上的设计需求分析
2.2.1 柔性电容器模块的设计需求
超级电容器因其充放电速度快、电容量大、绿色环保等特点逐渐在能源领域占有一席之地。纤维状柔性超级电容器不仅具有超级电容器的优势,同时还具备一定程度的变形能力。相比起压缩传统的锂电池体积,采用柔性电容器作为供能模块,机械性能更强,有利于微型仿生鱼快速游动的同时也保证了电能输出的稳定,更适合作为微小灵活的微型仿生鱼的动力源。
2.2.2 电力推进系统的结构介绍
微型仿生鱼电力推进系统[5]组成如图1所示,主要由柔性电容器模块、管理模块、DC/DC变换器模块和电机驱动模块组成。具体模块设计如下:
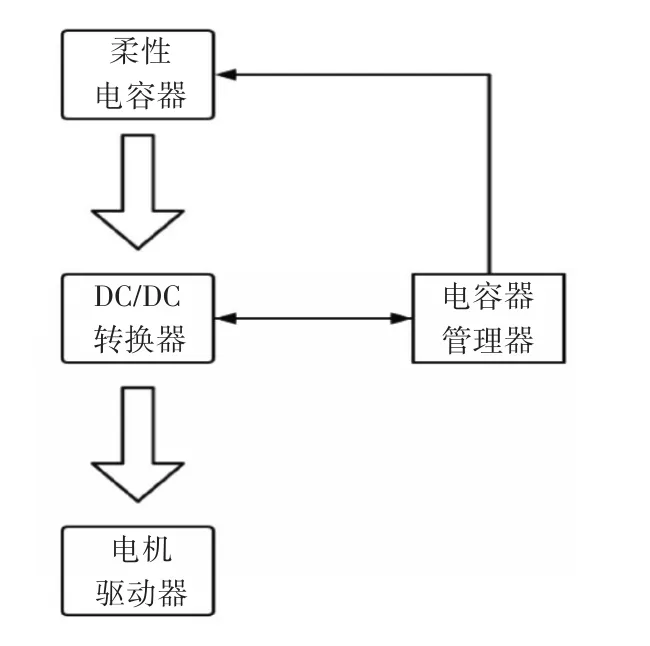
图1 微型仿生鱼电力推进系统组成图
本文提出的微型仿生鱼采用BCF推进模型,依靠尾部摆动前进,具体结构如图2。采用非隔离型开关DC/DC升降压变换器,选择峰值电流型PWM控制模式,如图3和图4所示。
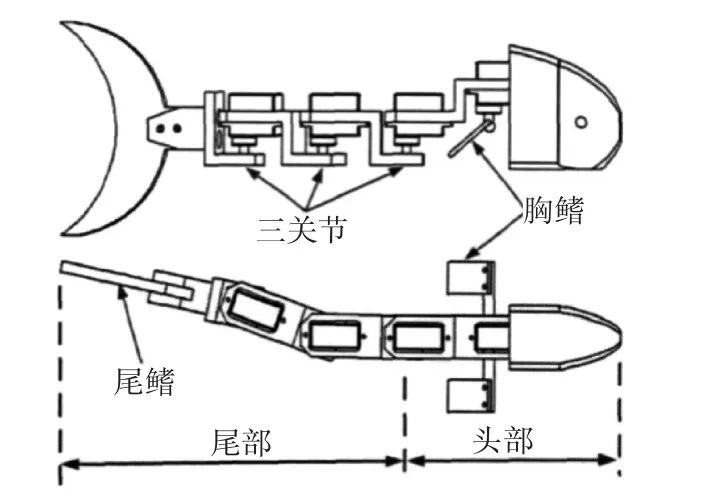
图2 仿生鱼简单结构图[6]
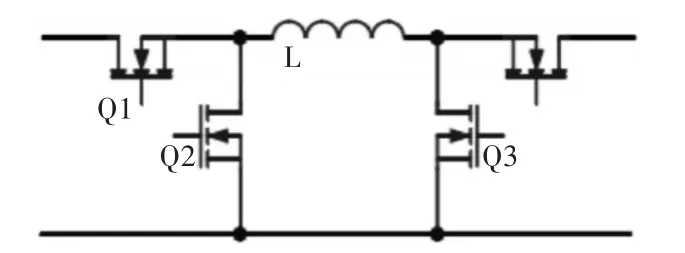
图3 DC/DC变换器结构图[7]
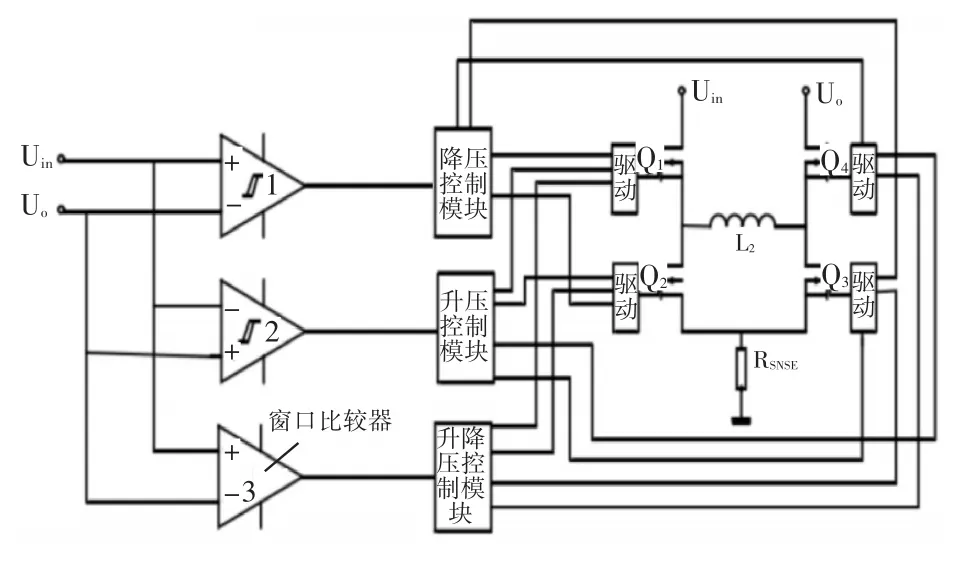
图4 峰值电流模式控制电路
仿生鱼头部的胸鳍由一个电机控制,尾部以三关节串联式电动舵机相连,第一个关节与胸鳍电机相连。工作时,柔性电容器产生的电能传入DC/DC变换器,根据不同的电流情况自如选择升降压工作模式进行稳压,转化为安全电源之后,经电机输出轴传输驱动电机,各舵机内部的基准电路接收到PWM信号后产生周期性转动,尾部与胸鳍同时产生推力,推动仿生鱼向前游动。管理系统则通过对电压、电流和温度的实时监测,估算电容器剩余电量,均衡管理充放电,使电容器保持在最佳工作状态,提高电动效率。
3 柔性超级电容器的性能研究
柔性超级电容器本身具有拉伸、扭转、弯曲甚至折叠的功能[8],满足了仿生鱼灵活、微小、高速的设计需求。因此,研究出兼具机械柔性和化学稳定性的电容并成功应用于水下无人系统是需要突破的瓶颈,也是未来无人装备领域的发展趋势。
与传统电容器、离子电池相比,柔性超级电容器具有结构可变形、循环寿命长、更长的充放电速率等优势。在当下的研究中尽管解决了柔性超电容器发展的诸多问题,但仍存在有待改进的技术。一是超级电容器的拉伸性能需要提高,找到提高电极材料和基底结合力的方式,从而提高循环稳定性[9]。二是各种电极材料均具有优缺点,决定超级电容器电荷储能性能的最关键因素是电极材料的特性,因此需要研究多个材料制备掺杂的方式,提高装备发展潜力。三是需要将超级电容器与其他电力推进元件结合,更好地发挥其优势、拓宽应用市场。因此,若要实现纤维电极优化,同时提升电容器的拉伸性能,需要从材料方面入手。可采用具有高比面积和高导电率的碳材料电极此外,也可通过赝电容电极材料,包括过渡金属氧化物(如RuO2、MnO2)、导电聚合物(如聚吡咯)等,沉积在碳纤维或金属支架上。
本文提出以导电聚吡咯为主的集成纤维作为超级电容器的电极材料。它具有高理论电容、高电子和离子电导率以及环境稳定性[10~11]的优点。通过化学聚合制备的PPy粉末由于其形态特征,不能直接在FSCs中直接组装成纤维电极。通常情况下,必须将PPy与纤维衬底结合,以提高其机械稳定性,同时保证足够的电导率和电化学性能。此外,采用墨水中的碳材料提供的柔性和骨架结构、快速的电子传输路径以及其网状结构的缓冲作用,允许材料在一定范围内的体积膨胀效益,从而提高了材料的循环稳定性。
制备柔性纤维电极时,使用湿纺丝法和聚合工艺结合,对材料的纳米结构尺寸和形貌的有效调控。纤维电极材料所制备的超级电容器兼具柔性与机械稳定性。在王鹏真[12]等针对该类型超级电容器所做的研究结果显示,采用海洋多糖海藻酸纤维构造电极,以海洋多糖为基础的藻酸盐膨胀保证了藻酸盐/PEDOT:PSS表面生长极薄的PPy层,有利于快速电子/离子转移和高效利用假电容PPy。同时,相关实验表明,该电容器可进行拉伸、扭转、甚至折叠等功能,并且在不同的弯曲角度下(0°~180°),电容器的电学性能改变均较小,证明其具有高韧性及高柔性的同时,也能保持较为良好的机械稳定性。
3.1 实验部分
3.1.1 纤维电极制备
配制3%的海藻酸钠溶液,使用针头25 G,注射速率0.5 mL·min-1的微量注射泵,将纺丝液注入质量分数为4.5%CaCl2凝固浴中,得到的海藻纤维(AF)经拉伸、洗涤、干燥(60℃下干燥8 h)备用。得到的海藻纤维在墨水中浸泡过夜,然后取出并在60℃下干燥,以获得AF@Ink纤维基底。将AF@Ink纤维分别在0.5M、1M和1.5M吡咯溶液中浸泡1h,使其表面溶胀并充分吸收吡咯单体。将0.5M Fe-Cl3·6H2O溶液添加到浸泡有AF@Ink的溶液中原位聚合。聚合反应在0℃~5℃的冰水浴中60min,得到黑色AF@Ink@PPy复合纤维经拉伸、洗涤、干燥(60℃下干燥8h)备用。
3.1.2 材料物性表征
采用扫描电子显微镜(SEM)对样品的形貌进行表征;同步热分析(TG-DSC)样品的热稳定性和组分、用Nicolet iso50仪器(Thermo Fisher)测定样品的红外光谱。
3.1.3 性能测试
单根纤维电极在三电极体系中的电化学性能。以铂电极为辅助电极,标准Ag/AgCl电极为参比电极,制备所得样品为工作电极,在1 M H2SO4水溶液中进行电化学测试。工作电极为长度1.0 cm的纤维样品,电压窗口设置为0~0.8 V。室温下,在电化学工作站(CHI-760E)中进行电化学测量。
1)比电容计算
根据GCD和CV曲线,电极的比电容(CA)由以下等式计算:
式中,A(cm2),I(A),ΔV(V),Δt(s)和CA(mF cm-2)分别是从GCD曲线获得的单个电极的面积、放电电流、电压、放电时间和面积比电容。
3.2 结果与讨论
图5(a)~(b)是纯海藻纤维在不同倍数下的扫描电镜照片。从图中可以看出纯海藻纤维具有清晰的条纹和沟壑的形貌,有利于吡咯单体的吸附。图5(d)~(f)可以出,处理过后的AF@Ink@PPy表面明显吸附了颗粒状物质吡咯单体,大小不一,但分布均匀。

图5 (a)-(c):不同倍数下海藻纤维的SEM图;(d)-(f):不同倍数下AF@Ink@PPy的SEM图
图6为AF@Ink@PPy的TG-DSC图,显示TG曲线缓慢下降后在200℃快速下降,推测由水分损失转变为海藻酸盐的热分解,430℃后趋于平缓。该现象归因为PPy结构分解,随着上述反应DSC曲线105℃以前急速上升,不断吸热,之后随着反应不断放热。

图6 AF@Ink@PPy的TG-DSC图谱
如图7(a)所示展示的AF@Ink@PPy电极在5mV s-1~200mV s-1不同扫描速率下的CV曲线均近似为矩形,表明其具有快速充放电性能。图7b是AF@Ink@PPy在不同面电流密度下的GCD曲线,可以看出其具有优异的比电容,在3 mA cm-2电流密度下具有最长的充放电时间,并且曲线具有良好对称性,说明效率相当,复合材料具有优良的电化学反应可逆性,与图7(a)相对应,进一步反映了电子转移快和电容性好的特点。图7(c)显示了AF@Ink@PPy在不同长度电流密度下的比电容。AF@Ink@PPy纤维在扫描速率为0.1mA cm-1时,比表面积为32.1mF cm-1。电化学阻抗谱(EIS)分析表明,AF@Ink@PPy的半圆半径在高频区域较小,表明电荷转移电阻较低。在低频时,AF@Ink@PPy的垂直线更大,说明离子扩散阻抗小,离子迁移动力学强,具有显著的电化学性能,表现出良好的电导率和快速的离子迁移速率(图7(d))。

图7 AF@Ink@PPy采用三电极体系测试其电化学性能
如图8(a)~(c)是不同浓度吡络溶液下样品充放电曲线,可以直观地看到不同浓度溶液下制备的电极恒电流充放电性能有差异。在电流密度为3 mA cm-2下1 M吡络溶液具有最佳充放电性能。该条件下和0.5M吡络溶液相比,充电时间增加了20s,放电时间增加了25s;与1.5 M相比,充电时间增加了17s,放电时间增加了10s,各样品具有良好对称性,电化学反应可逆性较好。图8(d)可以明显看出1 M样品曲线相比于其他浓度样品具有更大的CV曲线面积,即具有更高的比电容,上下曲线比较对称,说明电极反应的可逆性并无较大变化,与充放电曲线相对应。图8(e)为三种样品在同一电流密度下GCD曲线,可以更为直观看出1 M浓度下,放电时间远远高于0.5 M和1.5 M的样品,具有更高的比电容。几乎对称的GCD曲线表明充放电时具有优良的库伦效率和电化学性能。图8f可以更直观看出1 M样品的电化学性能要优于其他样品性能,充放电时间分别提升了3倍~6倍,0.5 M,1 M和1.5样品在3 mA cm-2的面积比电容分别为103.5 mF cm-2,199.1 mF cm-2和 24.8 mF cm-2。可能是由于随着刚开始吡络单体增加,性能随着其而提升,但是,当吡咯浓度达到1.5 M时,纤维电极面积比电容逐渐减小,可能是因为较厚的聚吡咯层阻碍了导电墨水与聚吡咯的协同作用,电阻增大,反应面积减小,性能随之降低。
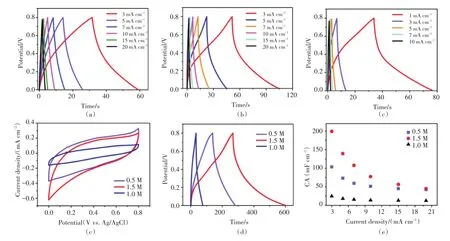
图8 (a-c)为0.5 M,1 M和1.5 M吡咯溶液时不同样品的GCD曲线;(d)为不同样品的循环伏安曲线;(e)为不同样品GCD曲线;(f)为不同样品的比电容
4 结语
电力不足、续航能力短是水下微型仿生鱼在发展过程中面临的巨大挑战。在本文中,我们测试了了一种柔性的、超高容量的光纤电极的电化学性能并最大限度地提高并利用性能对称光纤超级电容的能量密度,并论证将其应用于微型仿生鱼电力系统中的可能性。然而,虽然柔性超级电容器具有高灵活性、循环寿命长、质轻等优点,但由于其能量密度低于电池,因此在实际应用领域仍有较大限制。当前,国内外均针对提升柔性超电容的电化学性能进行研究,也取得了一定进展。在未来,需要从以下几个方面重点切入。1)需要继续探索强化其电化学性能和力学性能的方法,实现高储能和高柔性。2)提升纤维电极的能量密度,拓展应用场景和应用寿命。3)完善纤维超电容电极的制造工艺,实现大面积超电容的使用。因此,优化纤维电极性能且兼提升制造工艺,将是未来将超电容投入水下无人系统使用的关键方向,相关研究将为无人装备领域发展提供科学的指导。
