基于UWB-CMI方法的电力变压器绕组径向变形检测研究
2022-03-17宋云东苑经纬韩洪刚王冠宇
宋云东,苑经纬,韩洪刚,王冠宇,郭 铁,刘 旸
(国网辽宁省电力有限公司 电力科学研究院,辽宁 沈阳 110006)
电力变压器在输电或短路过程中产生的机械力可能会导致变压器绕组故障,发生径向变形或轴向位移。径向变形会使变压器绕组表面突起,而轴向位移则会使绕组向上或向下移动。变压器绕组故障将会造成变压器及其它设备的损坏,影响电力系统稳定运行,因此,电力系统变压器绕组的在线监测[1]和故障评估显得尤为重要。
目前,国内外学者对绕组机械故障检测方法进行了大量研究。文献[2-4]将散射参数法用于绕组位移的诊断;文献[4]计算了散射参数,并将其大小和相位存储在数据库中,然后采用k最近邻(k-Nearest Neighbor,KNN)分类算法和决策树分类算法分别进行故障诊断,展示了KNN相对于决策树分类算法的优越性。变压器故障检测的另一种常用方法是传递函数法[5-7]。在文献[7]中,为了检测变压器绕组中的异常情况,计算了传递函数,并通过基于向量空间的透视图改善了透明度不足的问题。在文献[8]中,通过变压器特性阻抗的变化来检测绕组中的不同缺陷。还有许多其他检测变压器绕组故障的方法,如低压脉冲法、短路阻抗法[9]和超宽带(Ultra wide band,UWB)传感器法[10-12]等。
本文提出了一种基于超宽带和微波共焦成像(Ultra wide band and confocal microwave imaging,UWB-CMI)方法的波束形成新方法来检测变压器绕组径向变形,利用天线发射UWB短脉冲,接收器接收来自变压器绕组的后向散射响应并计算后向散射能量分布,再采用微波共焦成像(Confocal microwave imaging,CMI)方法获得绕组的2D图像,来确定电力变压器绕组径向变形的大小和位置。将这种方法用于不同位置径向变形的变压器模型进行试验验证,试验结果证明,这种方法对检测和确定径向变形位置的有效性。
1 UWB-CMI方法检测绕组变形原理
CMI方法广泛用于乳腺组织中的肿瘤检测[13-15],因为正常乳腺组织和恶性组织在微波频率下的介电特性有显著区别,与组织的其他部分相比,肿瘤表现为散射体,反射入射脉冲的强度更高。本文利用这一技术检测变压器绕组的变形。变压器绕组中的各种变形将导致变压器中绕组的形状不同,因此变形前后接收到的信号会导致不同的衍射和散射强度。因此,这种方法能够检测2D图像中的变形。本文所提出的方法可以在线检测变压器绕组的主要机械故障。
为了收集变压器绕组的更多信息,收发机天线在线性路径中移动,并且在多个点处重复发射和接收过程。在每个位置,天线发射UWB脉冲,接收器接收来自变压器绕组的后向散射响应,并计算后向散射能量分布,再利用CMI方法重建绕组的图像。在合成图像中,绕组显示为圆形。如果发生径向变形,绕组将在合成图像中显示为一个突起。因此,可以通过检查绕组的UWB图像来检测径向变形。此外,由于图像中突起的位置与绕组上的位置匹配,因此可以检测径向变形的位置。
2 UWB雷达成像
在UWB成像中,通常有3种不同的方式来测距,分别为单边双向测距[16]、双边双向测距[17]和多边双向测距[18,19]。本文采用双边双向测距方式,因为这种方式更适合设置和参数配置。
UWB雷达成像数据测量过程如图1所示。收发器用于产生短脉冲并通过天线传播。传播的短脉冲击中目标后,会提供目标脉冲响应信息。
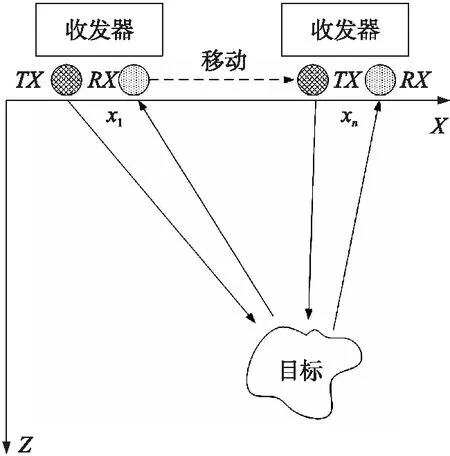
图1 UWB雷达成像数据测量过程
如果使用宽波束天线[20],可以从X轴上的宽范围点“看到”目标。通过在X轴上滑动天线,可以收集来自目标的更多信息。在沿X轴的预先设定的测量点上重复测量响应过程。
在数据配准过程中,相邻测量点之间的距离(测量点步长)是恒定的。为了提高图像的分辨率,应选择尽可能宽的测量点范围。
在某一点测量的反射响应称为扫描。所有扫描的集合形成一个2D信号,它是时间和测量位置的函数。进一步处理以形成目标的2D图像[21]。
UWB成像可以使用不同种类的脉冲和调制进行。本文采用正弦载波调制的高斯脉冲,如图2所示。

图2 发射UWB脉冲
在采用CMI方法之前,应对接收到的信号进行预处理,以去除并非源自变压器绕组的后向散射信号,并补偿信号振幅的传播损耗[11]。
天线处接收到的信号包括直接视线信号、变压器加噪声的响应以及多径反射产生的干扰信号,这些信号的接收时间晚于变压器绕组反射信号。
图3为某次扫描的结果由3个部分组成,第一部分是接收器接收到的入射脉冲,称为串扰;第二部分是目标反射,这是所需的目标信号;第三部分由墙壁和桌子等物体的反射组成,称为环境光。
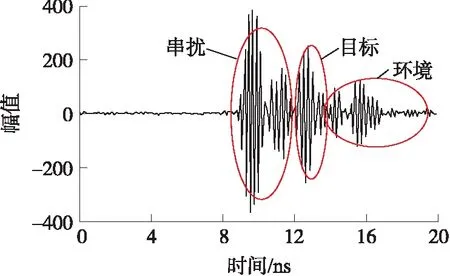
图3 样本扫描结果的不同部分
在移除串扰和环境部分之前,必须估计扫描的时间零点,即UWB脉冲的传输瞬间。因此,首先,串扰信号的时间延迟TTXRX为TX和RX之间的距离除以波速。如果串扰信号在τct处达到峰值,则时间零点(τ0)计算如下
τ0=τct-TTXRX
(1)
如图3所示,由于变压器距离两个天线足够远,因此接收信号的目标信号(变压器反射)是可分离的。因此,可以采用时间窗方法来移除非目标信号。
时间窗为
(2)
式中:TPulse是持续发射脉冲的时间,N是窗口长度。选择窗口长度,以便消除环境信号。在消除接收信号的非目标信号之后,对于相干处理,加窗信号延迟若干样本,并与来自期望焦点(位置r0处的点)的返回对齐。这种时间延迟可通过发射器和接收器位置以及焦点位置计算,如式(3)所示
(3)
最后,需要考虑传播衰减的影响。由于目标是金属的,反射足够强,因此衰减不大;因此,对于图像形成,信号振幅被归一化处理。
3 CMI算法
延迟-求和(Delay and sum,DAS)可控波束定位法是一种CMI算法,已广泛应用于医疗应用[14,15,17]。算法的第一步是预处理。在聚焦过程中,焦点在成像平面中从一个位置变化到另一个位置,形成各种空间光束[22-24]。
在每个位置,将时移信号的所有值平方后相干相加,然后对求和进行积分,如公式(4)所示[13]

(4)
式中:I(r0)是焦点r0的强度,y(r0)是接收器处的预处理信号,ni(r0)是为对准计算的时间延迟。指数i表示第i个测量点,M表示测量点数量。L是应用带宽,即设置中使用的入射脉冲带宽。
为了保留绕组各点的图像细节,去掉等式(4)中的平方,如式(5)所示
(5)
当变压器在加窗接收信号中的响应相干时,信号的大多数I(r0)样本是正的。响应越不连贯,I(r0)样本中的负样本就越多。因此,当r0接近变压器位置时,这些对齐的信号将变得更加相干,并且I(r0)会产生更大的正值。相反,对于远离变压器位置的点,公式(5)会得到更大的负值。因此,忽略这些负值(替换为零),I(r0)矩阵结果就显示为2D RGB图像[24]。
这种算法可概括如下:
①确定所有接收信号的时间零点;
②设计一个具有适当长度的时间窗口,用于将目标信号与接收信号分离。
③信号相对于每个焦点进行时间对齐,以便进行相干处理。
④为补偿损失,校准加窗和时间对齐信号y(r0)。
⑤对步骤④中的信号求和进行积分,以计算每个焦点的强度。
⑥将所得矩阵的负值替换为零,然后将I(r0)矩阵描述为2D RGB图像。
4 试验结果分析与讨论
为了实现UWB成像过程,使用了文献[12]中的设置和绕组模型,如图4所示。

图4 用于测试算法的绕组模型
图5为实验装置俯视图。绕组模型为一个圆形,其表面有一个矩形凸起,表示径向变形。天线移动方向标记为X轴,波传播方向标记为Z轴。径向变形的尺寸表示为Rdif和Ddif。天线位于绕组模型的左侧。因此,大多数入射波都会击中变压器绕组左侧部分,故大多数反射波都来自绕组左侧部分。因此,绕组模型的此部分将在结果图像中高亮显示。

图5 实验装置俯视图
为了评估所提方法的有效性,设计了4次不同的试验。在第一次试验中,绕组完好无损,没有径向变形。对于图5中的观测者,在第二次、第三次和第四次试验中,变压器盘的右侧、左侧和中心分别产生一定尺寸的径向变形。
这四个试验表征了实际变压器绕组中不同位置的径向变形。模型试验的参数配置如下:测量步长,即相邻测量点之间的距离,选择小于UWB中心频率波长的一半(本文中为31 mm);测量点的数量根据测量跨度(设置为1 200 mm)确定。径向变形的大小为Ddif=40 cm,Rdif=20 cm。
对于每个试验,采用CMI方法进行测量扫描、预处理和波束形成等步骤。10个对准信号样本的积分步长L通过实验进行适当调整。然后以彩色图比例绘制2D图像函数(I(r0)),以获得模型的2D图像。在彩色图比例图中,像素的颜色表示这种像素处图像函数的大小。冷色表示低值,暖色表示高值。
图6(a)为绕组模型没有径向变形(试验1)的合成图像。在此图像和后续DAS图像中,模型显示为多个红色圆弧。多弧是由UWB的脉冲形式引起的。正弦载波的每个周期都可能在图像函数中产生一个峰值,从而导致仅由一个表面反射引起的多个峰值。在图6(b)中,将DAS图像放大以便于观察。如图所示,圆弧具有相当均匀的图案,没有不对称的热点。这种形式的弧表示绕组完好无损,没有径向变形。
图6(c)~6(e)分别为绕组模型试验2、试验3和试验4的DAS图像,即相对于图5中的观测者,绕组的右侧、左侧和中心分别发生了变形。在试验1(图6(c))中,由于右侧绕组位移,热点位于变压器右侧。在图6(d)中,左侧绕组位移,热点位于绕组左侧,在图6(e)中,绕组位移导致圆弧中心的圆弧形状变形。图像右侧的图例描述了与每种颜色对应的光谱值大小。

图6 模型的DAS图像
在每个DAS图形中,变形的正确位置由白色矩形标记。从图中可以看出,波束形成算法能够检测并确定变压器绕组中的径向变形位置。
将CMI算法结果与文献[12]的基尔霍夫算法结果进行比较,可以发现,CMI算法都具有高分辨率,图像清晰,且都能准确判断变压器绕组的变形大小和位置信息,通过比较绕组位移前后获得的图像,可以检测到绕组变形位置,但算法获得最终图像需要更长的时间,而基尔霍夫算法速度快,在较少的时间内就能得到最终结果。但对于实现过程,CMI算法更简单,也更直观。
5 结束语
为了能快速准确诊断绕组变形故障,提出了一种基于UWB-CMI方法的变压器绕组径向变形检测与定位新方法,设计了测试装置,包括变压器绕组模型和UWB收发器,利用天线发射UWB短脉冲,接收器接收来自变压器绕组的后向散射响应并计算后向散射能量分布,再采用CMI方法获得绕组的2D图像,来确定电力变压器绕组径向变形的大小和位置。为了验证所提出方法的有效性,对4种不同位置的变压器径向变形模型进行了试验,试验结果表明,利用变压器模型的二维图像,可以检测变压器径向变形的发生、尺寸和位置。与基尔霍夫方法相比,两种方法都能对电力变压器绕组变形大小和位置实现有效检测。虽然CMI方法运行时间较长,但CMI算法简单易懂,也更直观。
