基于模型预测的中置轴汽车列车横摆控制研究
2022-03-17施锦玮王洪亮皮大伟王显会
施锦玮,王洪亮,皮大伟,王显会,章 俊
(南京理工大学 机械工程学院,江苏 南京 210094)
随着全挂车被明令禁上高速而逐步退出历史舞台,中置轴挂车的发展迎来新的契机,并已于货运交通行业得到广泛应用。
中置轴汽车列车是组合式车辆,区别于传统的单列车辆,其多自由度结构一定程度上使得车辆的运动状态更为复杂,这类列车在某些工况下行驶过程中易出现“折叠”、“摆振”等失稳现象[1]。当前国内对组合式车辆的横摆稳定控制研究从使用结构参数的优化逐步转变为主动安全控制技术,其中单列车辆因其相对简单的构造已配备大量各类先进的主动控制技术来实现车辆的稳态控制。组合式汽车列车的横摆稳定性控制研究更多是单一地针对牵引车或者挂车,且组合式汽车列车的研究成果更多集中于半挂汽车列车。文献[2]提出基于广义预测的差速制动来实现汽车横摆稳定性的控制;文献[3]提出了包含横摆力偶矩决策及横摆力偶矩分配的双层控制器有效提高了车辆的横摆稳定性;文献[4]设计了基于稳态横摆角速度控制为目标的直接横摆力偶矩控制策略有效地改善了半挂汽车列车的行驶稳定性。
组合式车辆的研究视线也逐步从半挂车转移至中置轴挂车,大量的研究表明中置轴汽车列车的横摆稳定性控制可借鉴半挂车汽车列车来展开研究。本文针对组合式汽车列车的构成及运动特性对前后车均施加主动控制,采用分层控制思想设计了直接横摆力偶矩决策层和制动力分配层,即以差动制动力[5,6]为执行力来实现整车的横摆稳定性[7]控制,并在Simulink-Trucksim联合仿真平台对控制策略的效果进行验证。
1 模型建立及验证
为分析中置轴挂车转向制动时的横摆稳定性,本文对研究对象进行动力学建模,主要分为中置轴挂车整车模型及刷子轮胎模型两个方面。首先基于研究对象做出合理的假设从而一定程度上简化模型的搭建,再通过对车辆的横向运动和纵向运动的分析进行理论公式推导,继而建立中置轴挂车的Simulink动力学仿真模型,最后利用成熟的车辆开发软件TruckSim对上述的基于Simulink搭建的车辆模型进行校核,以确保后续控制器设计的准确性和可靠性。
1.1 整车模型
组合式汽车列车车与单车相比,其行驶过程中的横摆运动更为复杂[8]。一方面由牵引装置连接而成汽车列车的稳定性必然会受到挂车运动的干扰。其次,仅凭驾驶员基于牵引车当前的运动状态无法预判挂车的运动,从而无法做出正确的操作指令[9]。
本文依据汽车动力学理论对中置轴汽车列车模型作如下简化:忽略前后车辆的俯仰运动和侧倾运动,同时不计空气阻力的影响,并假定车辆运动过程中铰接处垂向载荷变动轻微,得到如图1所示中置轴汽车列车四自由度车辆运动模型。
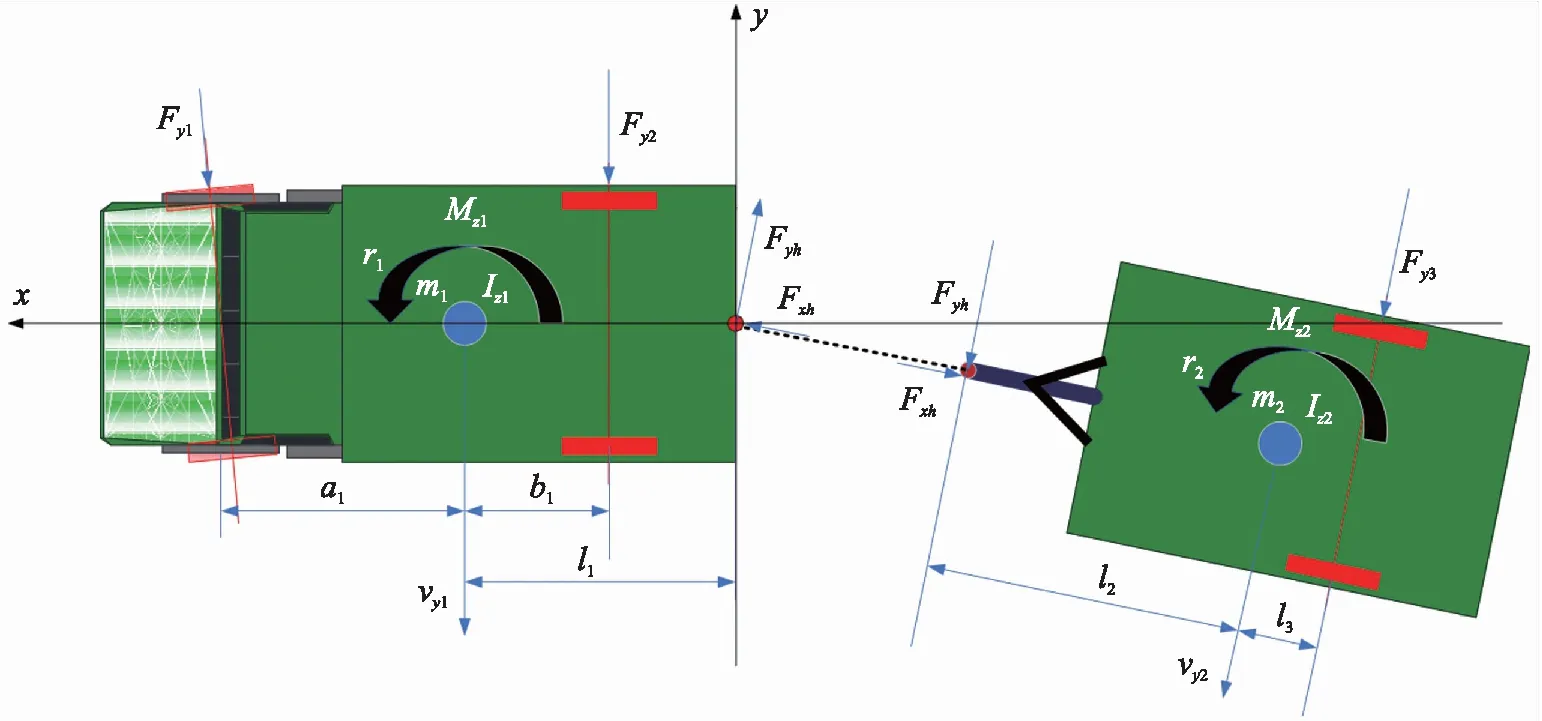
图1 车辆运动模型
在四自由度运动模型的基础上,再假定牵引车的纵向速度u1为正。中置轴汽车列车在常规的高速行驶过程中的转向角和铰接角一般不会发生剧烈震荡,故而四自由度中置轴汽车列车运动模型可以假定为线性运动[10]。
牵引车侧向力平衡线性方程如下
(1)
牵引车力矩平衡线性方程如下
(2)
中置轴挂车侧向力平衡线性方程如下
(3)
中置轴挂车力矩平衡线性方程如下
(4)
牵引车与中置轴挂车之间的运动关系
u2=u1cosγ≈u1
(5)
vy2=-l2r2-u1sinγ+vy1cosγ-l1r1
(6)
(7)

1.2 轮胎模型
本文采用刷子轮胎模型,该模型对轮胎侧偏力的计算是关于侧偏刚度C、法向载荷Fz、路面摩擦系数φ以及由轮胎横、纵向力之间的耦合因子η的函数[11],刷子轮胎模型的侧偏力方程如下
(8)
式(11)中αmax为轮胎的饱和侧偏角,此时轮胎侧偏力最大,定义为
(9)
式(11)、(12)中η为车辆运动过程中轮胎纵向力及侧偏力之间的耦合关系,定义如下
(10)
式(13)中Fx为轮胎纵向力,将φFz作为刷子轮胎模型的可调参数,通过改变φFz从而得出近似耦合的轮胎力关系。
由Simulink所搭建的刷子轮胎模型在某路况下进行仿真拟合,拟合侧偏力与侧偏角的关系如图2所示。

图2 侧偏力与侧偏角拟合关系
车辆在良好路况行驶且载重恒定的前提下,胎面产生的侧偏角较小,由图2可知侧偏角与侧偏力之间一定程度上呈现一次线性关系,故轮胎模型的侧偏力方程(8)简化如下
(11)
对图示车辆模型再作如下假设:车辆行驶过程中每一轴两侧轮胎的侧偏角大致相等,这样在一定程度上降低了相关计算的复杂度[12],图示车辆每一轴的侧偏角αi计算如下
(12)
(13)
(14)
由侧偏角可计算当前车辆每轴的侧偏力Fyi
(15)
(16)
(17)
联立式(1)、(2)、(6)、(7)再将以上Fyi带入可得
(18)
联立式(2)、(3)、(6)、(7)再将Fyi带入可得

(19)
联立式(3)、(4)、(6)、(7)再将Fyi带入可得
(20)
由式(18)、(19)、(20)及铰接角及其角速度的关系可列出该车辆模型的状态空间方程式,如下
(21)
式中:M为可逆的4*4矩阵,故式(24)可写作如下
(22)
其中w0为系统扰动量,具体如下
w0=B2δ1
(23)
由式(25)可知A=M-1A0为系统的状态矩阵,B=M-1B0为系统的输入矩阵,C为系统的输出矩阵,以上矩阵分别如下所示
1.3 模型验证
基于车辆运动学公式的推导在Simulink中搭建中置轴汽车列车模型,与TruckSim模型在给定路面条件下进行比较观测量的响应情况,仿真行驶工况与车辆具体参数见表1。

表1 仿真行驶工况与车辆具体参数
本文对观测量的选取是基于上述状态方程而确定的。横摆角速度是传统的单车横摆稳定性重要的评价指标之一,其次对于本文研究的中置轴汽车列车这类组合式车辆,考虑到前后车铰接点处存在相互影响,并且该点作为研究前后车运动状态耦合的关键,故本文选择牵引车的横摆角速度及前后车的铰接角作为评价指标[13-15],在设定仿真路径的基础上,对标TruckSim对进行模型验证,可得模型仿真验证结果如图3所示。

图3 模型仿真验证图
从Simulink以及TruckSim模型输出的对比验证结果来看,TruckSim模型相较于Simulink模型仍存在局部环节响应迟滞的现象,但各图对应曲线的走势基本相符,误差值较小,且在合理范围之内。
上述验证结果表明本文用于Simulink建模的理论公式及状态方程基本是正确的,同样也保证了后续的控制器设计计算的可靠性。
2 模型预测控制器设计
MPC原则上是一个处理被控对象的优化问题,即在有限的时间步长内预测并解决动态离散的模型以最大程度达到预期指标的问题,因此MPC提供了一种实现有效约束的控制方法。本文的车辆横摆稳定控制框架采用双层控制结构,上层为横摆力偶矩决策层,下层为制动力分配层。上层的动态控制是由MPC控制器[16-18]基于参考模型解算出期望的横摆力偶矩[19],下层控制器依据制动力分配策略将上层解算的横摆力偶矩换算至各个车轮的制动力,从而实现对整车横摆稳定性的控制。本文的横摆稳定性控制策略结构如图4所示。

图4 控制策略结构图
2.1 MPC控制算法
本文基于面向转向工况的车辆制动横摆稳定性控制而建立预测模型及在规定的时间步长结合目标函数以及约束条件来实现优化控制。
首先是将上述车辆的状态空间方程式在任一时刻工作点[x,Mz]处泰勒展开后与原式做差,再将其离散化可建立如下预测模型
x(k+1)=Akx(k)+BkMz(k)
(24)
式中:Ak=E+TA,Bk=TB,T为采样时间。
对式(24)作如下设定
(25)
于是可得新的预测模型
(26)
其次是提出对上述车辆预测模型的约束条件。其中横摆力偶矩作为受控对象实质上是路面附着条件对地面制动力的限制,由式(10)可得纵向力的约束边界。
牵引车的纵向力约束边界方程定义如下
(27)
故牵引车横摆力偶矩约束边界为
(28)
同上,中置轴挂车的横摆力偶矩约束边界方程如下
(29)

组合式车辆中牵引车稳态时的横摆角速度受路面附着条件[21]限制如下
(30)
式中:Ks1为组合式车辆的前车稳定性因数[14],表示如下
Ks1=K-ΔK
(31)
式(31)中K为单独的牵引车自身的稳定性因数,ΔK为因中置轴挂车铰接影响而产生的稳定性变动因数,然而期望的牵引车横摆角速度为不论是否带有挂车,驾驶员都能感受到一致的响应。
中置轴汽车列车参考横摆角速度为r1ref,具体如下
(32)
同理,组合式车辆稳态时前后理想的铰接角速度如下
(33)
此处r2ref与r1ref在相位移上存在一段时间差-t,因为转向过程开始阶段由牵引车先转向,经铰接处再作用至挂车存在相应的延时,且该延时在TruckSim车辆模型中可估测,故而对上式积分可得中置轴汽车列车参考铰接角γref。
本文利用上述的预测模型及约束条件来提出最优化准则,使系统在将来时刻的输出值尽量接近期望值,目标函数如下
(34)
上式中,把控制量增量当作目标函数的状态量对控制量增量进行约束,有效地解决了控制量跳变剧烈时候的不稳定问题。其中Np为预测时域,Nc为控制时域,ρε为松弛因子。
2.2 制动力分配控制策略
在满足上述给定横摆力偶矩的条件下,对不同的车轮施加对应制动力产生的直接影响是各个车轮车速的变化,再由车速变化引起路径轨迹的偏离问题,所以对车轮进行制动力的分配很有必要。
针对上述问题拟定如下制动力分配策略。由当前车辆的运动状态根据式(15)、(16)、(17)可求解出各车轮实时的侧偏力Fyi,再结合各轮垂向载荷在附着极限下的φFzi,由如图5所示的轮胎力矢量分解法可知各轮胎剩余可供分配的纵向力极限Fixs,再根据同内侧前后两轮的Fixs的比值对控制量增量-MZ进行分配,尽可能防止制动力达到轮胎力的剩余极限;对于同外侧前后车轮不采取制动。仿真路况中各轮胎纵向力的剩余极限Fixs如图6所示。

图5 轮胎力矢量分解
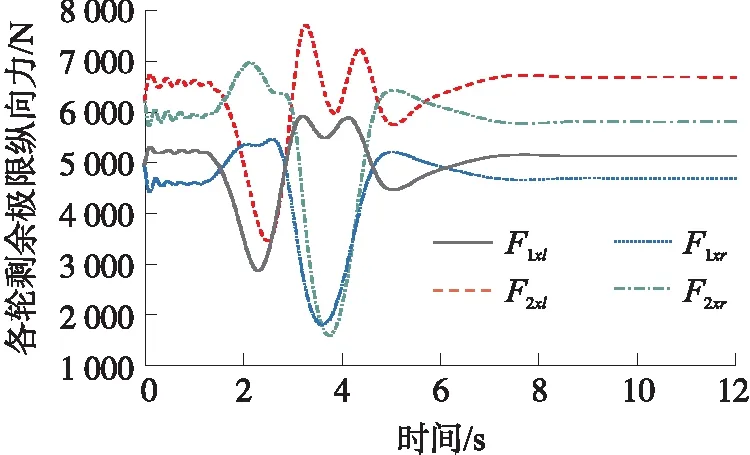
图6 轮胎纵向力的剩余极限
3 仿真验证
基于图3(a)参考路径来展开TruckSim-Simulink联合仿真,以牵引车横摆角速度、前后车辆铰接角为主要研究指标,分析车辆在该工况下实施差速制动对横摆稳定性的控制效果,仿真结果如图7所示。
仿真结果表明,在MPC控制下施加差速制动后一定程度上降低了牵引车的横摆角速度的幅值,且能够较好地跟随期望横摆角速度,相较于未施加控制时车辆的横摆角速度响应,在t=3.2 s时,横摆角速度的幅值降低得最为明显,约为33%,同样铰接角的幅值有所减小,对期望铰接角的跟随效果也有了一定程度的提升,其中在t=4.3 s时,铰接角相较于无控制时减少了25%,波动趋于平缓,这对于提升车辆转向制动时的横摆稳定性具有显著意义。此外车辆运动过程中存在的轨迹偏移问题在这里也得到了很好的解决,实际行驶路径的横向位移较未施加控制时的行驶路径偏移量有所减少,与参考路径之间的偏差的绝对值基本稳定在0.2 m以内,车辆行驶路径与预定轨迹基本一致,表明了本文所提出的制动力分配控制策略的合理性。
4 结束语
本文首先基于理论的公式推导建立了Simulink车辆动力学模型,再通过TruckSim来验证此前模型的准确性,同时保证了下文车辆状态方程及控制器设计计算的可靠性。本文以预定路径及附着条件、初始车速为输入,以牵引车横摆角速度、前后车之间铰接角为观测及优化目标,以横摆力偶矩为控制对象,提出了以轮胎纵向力剩余极限来分配横摆力偶矩的控制策略,并设计了中置轴汽车列车MPC控制器。基于以上研究,仿真验证的结果表明,本文所建立的MPC控制器对于提高车辆的横摆稳定性具有显著意义。下一步可以考虑尝试更换基于滑移率的横摆力偶矩分配的优化方案来产生更优的控制效果。
