复杂激光点云数据中路面自动化提取技术
2022-03-17陈天珩张福俭
陈天珩,于 斌,马 羊,张福俭
(1.东南大学 交通学院,江苏 南京 211189;2.中交雄安投资有限公司,河北 保定 071000)
由车载激光雷达所生成的点云数据可以较为精确地反映道路三维环境。它的工作原理是用激光发射器向目标发射激光信号,并接收目标反射回来的激光信号,可以得到目标点的相关信息,并结合激光发射器的位置、高度、激光发射方向和激光扫描角度,可以准确计算出目标点的坐标,并获得点的反射强度等相关信息。通过从采集的高精度点云数据中提取不同的道路信息可以实现道路基础设施的数字化,也可以帮助构建高精度地图以及用于无人驾驶[1,2]。但由于激光雷达所获得的数据量十分庞大,不能直接获得所需的道路信息,因此需要先对其进行处理,区分出路面点与非路面点,并进一步提取相关道路要素。
Guan[3]提出了一种基于斜率与高程判断道路边界的路面提取方法,在对数据分层之后,根据斜率与高程筛选出可能是道路边界的点。续东等[4]结合道路空间特征和测量距离进行道路边界的识别,方莉娜等[5]使用主动轮廓模型算法识别道路边界,但是这些方法在识别道路边界时需要一定的先验知识。Guo等[6]将扫描角也用于判断路面点的指标之一,不过,并非所有的点云数据集中都含有扫描角这一数据。也有不少学者将聚类[7,8]与马尔可夫随机场[9]的方法用于路面点的提取中,不过这对点云降噪的要求较高。
区域生长的方法直接利用路面点的特性,也是一种较为热门的方法[10,11]。Li等[12]提出了一种基于邻域数、曲率和高程的初始种子点选择方法,并以种子点和邻域点的连线与种子点切平面的夹角为区域生长条件进行路面点提取。在使用区域生长算法对路面进行分割时,由于道路环境的复杂性,区域有可能会被过度分割,并且区域生长的方法可能会受到由于中央分隔带或行驶车辆遮挡导致部分路面点缺失的影响。
近几年神经网络[13-15]也逐渐被用于点云数据提取中。Engelmann等[16]研究了如何结合包括邻域信息在内的空间背景环境,从而改进用于三维语义分割的神经网络体系结构。Balado等[17]借助神经网络学习并选择可以对点进行分类的相关特征,从而完成语义分割,识别出点属于哪个元素。神经网络的方法需要有大量标定好的样本用于机器学习,对所拥有的标定好的样本数量要求较高。
本文提出了一种点云数据中路面点的识别方法,首先基于最近行车轨迹数据点进行道路剖面的划分,使用K维数据空间分割树(K-dimensional tree,KD-Tree)搜索出每个点的最近行车轨迹点。并根据它们的编号进行剖面的划分。然后采用点到行车轨迹的距离、高程、两个连续点的距离这三项指标,通过它们的阈值进行路面点的判定与提取。本方法所用到的数据包括点的坐标以及行车轨迹数据,是通用点云数据集中都含有的数据。
1 道路边界点的提取
1.1 道路剖面的划分
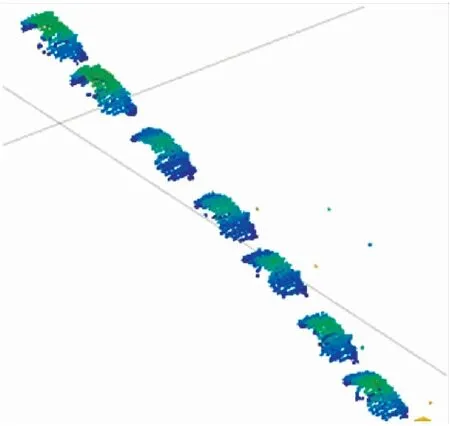
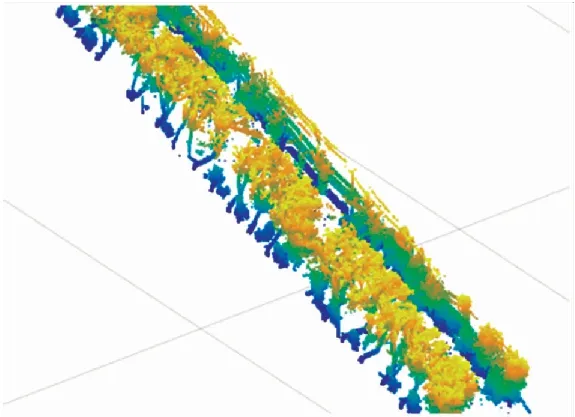
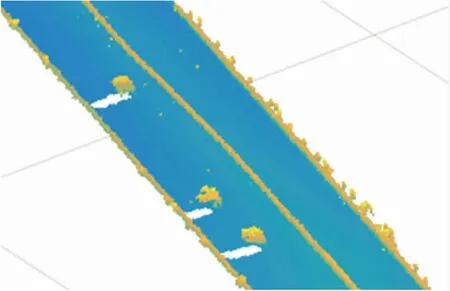
在提取路面点时,在某些情况下,例如,行车轨迹与路线方向存在偏差、所在路段纵坡较大时,可能需要设置动态的阈值。因此,需要先将其划分为若干个剖面,从而便于根据剖面设置动态阈值。本文采用的是基于最近行车轨迹点的剖面划分方法,使用KD-Tree从行车轨迹数据点中搜索出点云数据中每个点的最近行车轨迹数据点,所有最近行车轨迹点相同的点云作为同一个剖面上的点,之后再根据具体需要按照最近行车轨迹点的编号进行剖面的划分。本次采用的数据集1共483个行车轨迹数据点,8 508 372个点云数据。初始点云数据见图1,最近行车轨迹数据点编号为20~70的点云数据见图2。

图1 初始点云数据图

图2 最近行车轨迹数据点编号为20~70的点云数据
1.2 道路边界点的提取
在横断面方向上,从行车轨迹点开始向两边延伸,在路面范围内点的相关特性不会发生大的变化,当到达道路边界的时候,点的相关特征会有明显改变。这些点的特征中,高程的变化最为显著,因此可以依据高程的变化进行道路边界点的提取。图3为道路可行驶区域示意图。

图3 道路可行驶区域示意图
在根据高程变化进行道路边界点提取时,可能会受到中央分隔带以及路面行驶车辆点的影响。依据高程变化点到行车轨迹点的距离以及道路边界点的连续性特征可以进一步判断该高程变化点是否是边界点。图4为提取的道路边界点。

图4 道路边界点
2 路面点的提取
2.1 路面点提取指标
2.1.1 点到行车轨迹的距离
点到行车轨迹的距离可以用来判断点在横断面方向上的位置,从而确定路面范围。若行车轨迹为曲线,可以通过采用KD-Tree从行车轨迹数据中搜索出距离目标点最近的行车轨迹点以及对应的最短距离,作为点到行车轨迹的距离di。若行车轨迹为直线,则可直接将行车轨迹投影至XY平面并拟合为直线AX+BY+C=0,点到行车轨迹的距离即为点到该直线的距离。
(1)
本文中的坐标皆为大地坐标系,直接使用点云数据中的坐标数据。di的值保留正负号用来判断点在行车轨迹的哪一测。正号表示点在行车轨迹的右侧,负号表示点的行车轨迹的左侧。
2.1.2 两个连续点的距离
两个连续点的距离可以反映的是激光扫描点的密集程度,这和激光扫描仪与被扫描物体的距离以及入射角有关。两个连续点的距离Li越小,激光扫描点的密集程度越密。
(2)
2.1.3 高程
高程包括扫描点的高程Zi以及两个连续点的高程差▽hi,在路面可行驶区域的范围内,在到达边界处的高程突变之前,两个连续点的高程差是很小的。
▽hi=Zi+1-Zi
(3)
2.2 路面点提取方法
本文提出的方法思路如下。首先,根据点到行车轨迹的距离从行车轨迹点开始向两边延伸,直到延伸至道路边界为止,从而初步确定路面范围。接下来,由于路面点的部分特征具有相似性,因此再引入高程与两个连续点的距离这两个指标,从行车轨迹点向两侧延伸至边界的过程中,发生高程凸起或是两个连续点的距离、高程差发生明显变化的点则不属于路面点。
根据2.1节中提出的3个指标进行路面点的提取,若这些指标满足以下4个条件,则将其视为路面点
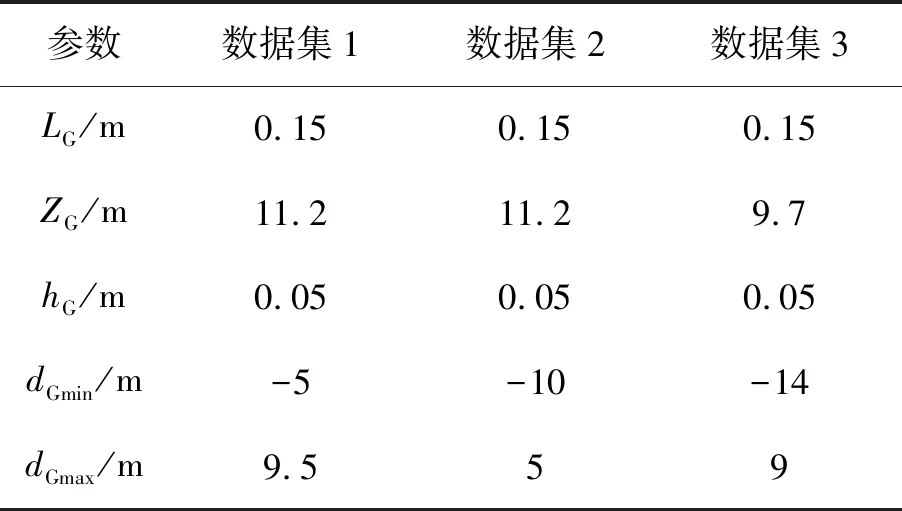
dGmin (4) Zi (5) ▽hi (6) Li (7) 式中:dGmin、dGmax、ZG、hG和LG为各指标的阈值。 dGmin和dGmax的取值由之前提取的道路边界点至行车轨迹点的距离决定,从而实现从行车轨迹开始向两侧延伸直至道路边界的搜索过程。ZG由每个剖面的行车轨迹高程决定,其值在每个剖面行车轨迹高程的基础上略微取大一些作为保守值。对于路面点而言,两个连续点的高程差与距离不会发生大的变化,通过人工选择一些相邻的路面点发现,两个连续路面点的高程差一般小于0.02m,两个连续路面点的距离一般小于0.12 m,hG和LG的取值在此基础上再略微取大一些作为保守值。本文采用数据集1的阈值取值,见表1。 表1 数据集1阈值取值 在路面点的上方,可能还会有路面上行驶车辆的点;在道路边界附近,还会有路边行道树的点。在从行车轨迹点向两侧边界延伸的过程中,在到达边界之前发生高程凸起的地方即为有行驶车辆的地方;在到达边界附近后高程明显变高的即为路边行道树点。因此,根据每个剖面的高程变化并结合点到行车轨迹的距离可以实现路面行驶车辆点以及路边行道树点的提取。提取结果见图5和图6。 图5 路面行驶车辆点 图6 路边行道树点 最终提取出的路面点及其它道路要素点见图7。 图7 算法提取结果 当激光雷达扫描道路周边环境时,部分路面点可能会被路面上的其它行驶车辆遮挡导致无法被激光所捕捉到。如图8所示,路面点缺失原因主要包括中央分隔带,路面行驶车辆以及路边行道树的遮挡。 其中,如图8(a)所示,图中可以看到存在一个“断层”区域。该“断层”区域的路面点由于中央分隔带的遮挡没有被激光扫描到,而图中却能看到该“断层”区域的行驶车辆,这是由于行驶车辆的高度一般大于中央分隔带的高度,行驶车辆的大部分表面可以被激光扫描到,因此出现了图8(a)中“断层”区域没有路面点,却有行驶车辆点的情况。 图8 路面点缺失原因 导致路面点缺失最多的原因是中央分隔带的遮挡,行驶车辆遮挡与行道树遮挡导致的路面点缺失相对较少。 如图9所示,中央分隔带遮挡住的区域大小与θ角有关,θ角与激光发射器高度,中央分隔带高度以及两者间的水平距离有关。 图9 中央分隔带遮挡示意图 (8) 激光发射器越高,中央分隔带越低,两者间的水平距离越小,则θ角越大,中央分隔带遮挡住的区域越小。不同道路之间的中央分隔带高度相差不会特别大,激光发射器一般位于车顶,其高度也不会相差很大,所以激光发射器与中央分隔带之间的水平距离是影响路面点缺失数量的主要因素。因此,为减少由于中央分隔带遮挡导致的部分路面点缺失,载有激光雷达的车辆应尽量靠近中央分隔带行驶。若实际条件不允许靠近中央分隔带行驶,实际路面点的缺失较大,那么载有激光雷达车辆可分别在中央分隔带的两侧行驶一次,从而补充一开始被遮挡住的那一侧的路面点。 本文共采用3个南京市城市道路的数据集加以验证。前文已经展示了数据集1的提取结果,接下来使用数据集2和3加以验证。数据集2共7 813 293个点云数据点,721个行车轨迹点;数据集3共6 609 614个数据点,557个行车轨迹点。 其中,由于道路宽度、高程和行车轨迹位置等因素的不同,相关参数阈值的取值也有所不同,需要作一些调整。由于本文采用的数据集行车轨迹与路线方向基本一致,因此每个数据集的dGmin与dGmax设为定值即可,若行车轨迹与路线方向不一致,那么dGmin与dGmax需要设为动态的阈值,由每个剖面上的边界点至其最近行车轨迹点的距离决定。相关参数的取值见表2。 表2 3个数据集的参数阈值取值 数据集2和数据集3的提取结果见图10和11。 图10 数据集2提取结果 图11 数据集3提取结果 由于数据集2和3中载有激光雷达车辆行驶位置与中央分隔带较近,因此不存在数据集1提取结果中的“断层区域”,只有部分因为车辆遮挡而没有被激光扫描到的区域。结果表明3个数据集都有较好的提取效果。 (1)本文提出了一种基于最近行车轨迹点的道路剖面划分方法,使用KD-Tree搜索出每个点的最近行车轨迹点并根据它们的编号来将整个路段划分为若干个剖面。 (2)本方法提出了两个连续点的距离、高程和点到行车轨迹的距离这三项指标,并通过它们的阈值进行路面点的提取。主要思路是以行车轨迹数据为依托,每个剖面从该剖面上的行车轨迹数据点开始向两侧延伸,直到延伸至道路边界为止,从而初步确定路面范围,再依据高程与两个连续点的距离这两个指标,从行车轨迹点向两侧延伸至边界的过程中,满足其阈值条件的即为路面点。 (3)点云数据集中由于中央分隔带,路面行驶车辆以及路边行道树的遮挡可能会存在部分路面点的缺失,其中中央分隔带的影响最大。可以通过适当抬高激光发射器高度,使载有激光雷达车辆靠近中央分隔带行驶等措施减少被遮挡住的路面区域。 (4)本文采用3个南京市城市道路的数据集作算法的验证,经过算法适用性检验,最终得到了较好的提取结果。
2.3 其它道路要素点提取方法

3 点云数据缺失及应对方案
3.1 点云数据缺失原因

3.2 应对方案

4 算法适用性检验

5 结束语
