数据链辅助北斗的连续导航定位技术*
2022-03-16杜晓华王春锋张昭坤
杜晓华,王春锋,张昭坤
(1.西安航天天绘数据技术有限公司,陕西 西安 710100;2.中国人民解放军94922 部队,浙江 金华 321000)
0 引言
20 世纪80 年代开始,美国海军太空与海战司令部、全球定位系统(Global Positioning System,GPS)计划联合办公室等机构均支持了大量GPS 与Link 16 数据链的融合研究。研究资料表明,Link 16 与GPS 的结合显著提升了数据链导航系统的稳定性[1-2]。其中,Link 16 对GPS 的辅助很重要的一项工作就是支持GPS 卫星观测不足时的定位。当GPS 星座被干扰时,每个节点可能不能收到至少4颗卫星的观测数据,但当Link 16 的相对测距网络正常工作时,则具备直接确定全网络绝对位置的可能。
北斗三号是全球覆盖的卫星导航系统,已经具备面向全球的导航能力。在无干扰场景中,北斗三号基于4 星观测可提供良好的几何定位,但在战区干扰场景中,低仰角卫星可能被拒止,具有点波束战区功率增强或高仰角高载噪比卫星可能仍能提供有效的伪距观测数据。在此类极端场景下,测量卫星数量少于4 颗,单个数据链节点无法完成北斗三号导航定位与时间同步。而数据链网络具备相对测距和校时能力,数据链各节点间进行测距值广播交换时,采用特定的滤波算法,可以实现网络节点的相对定位[3-5],但无法获取绝对位置参考。借鉴全球卫星导航系统和惯性导航系统(Global Navigation Satellite System/Inertial Navigation System,GNSS/INS)紧组合原理[6-12],当北斗和数据链均无法完成绝对定位时,组合二者的观测量[13-14],可实现基于非完整观测的北斗三号+数据链组合定位,提升在强导航对抗环境中的绝对位置获取能力。
本文对数据链相对测距和时间同步功能辅助北斗导航定位的融合技术进行研究,分析3 星+3 数据链节点、3 星+2 数据链节点的绝对定位原理,并通过仿真对比3 星+3 数据链节点、3 星+2 数据链节点与4 星+1 数据链节点的精度因子(Dilution of Precision,DOP)值。该研究对干扰环境观测卫星数量不足条件下的大型武器平台绝对导航定位有重要意义。
1 数据链辅助北斗的导航定位技术
1.1 北斗3 星观测+数据链2 节点绝对定位
一种基于两个数据链节点的最低限度观测如图1 所示。

图1 北斗3 星+数据链2 节点绝对定位
两个节点A、B分别收到3 颗卫星形成的有效观测,均无法完成北斗卫星独立定位。形成的伪距观测方程为:

式中:ρAi、ρBi为节点A、B与卫星i之间的伪距;Pi为卫星i在地心地固坐标系(Earth-Centered,Earth-Fixed,ECEF)坐标中的位置矢量;PA、PB为待求解的节点A、B位置矢量;c为光速;ΔtA、ΔtB为节点A、B的北斗钟差;εAi、εBi为节点A、B的伪距观测误差。当数据链进入精同步时,两个节点间利用往返校时(Round-Trip Time,RTT)原理可实现相对测距和校时。
数据链节点距离相对星地距离较小,当仅可获得3 星观测时,大概率两节点得到的是相同的3 星观测。数据链节点经过RTT 可获得相对距离与钟差的测量值,当数据链与北斗接收机时间完全同步时,数据链测量的钟差即为两节点北斗钟差,其计算方式为:

式中:ρAB为测量的节点A、B之间的距离;εAB为A、B之间伪距的观测误差;δt为节点A、B的北斗钟差,εtAB为时间观测误差。
联立方程组(1)和(2),可得:
采用类似导航解算的迭代法[15]求解方程组(3),可获得两节点的位置和钟差估计值。
下面参照导航定位中的DOP分析方法,对3星+数据链2 节点定位精度进行分析。在真实定位位置附近进行误差展开,假定两节点定位和钟差解算误差矢量为:

对于可获得观测值的3 颗星,节点A、B的单位视线矢量记为eAi,eBi,注意由于两节点距离相对星地距离较小,同一颗星到节点A、B的视线矢量接近平行,因此在计算过程中需要保留足够精度。A、B两节点的单位视线矢量记为eAB,当存在特定解算误差时,产生的8 个观测值误差为:

式中:矩阵H代表定位场景中的所有几何构型因子,是满秩矩阵。当观测误差已知时,定位解算误差为:

定位解算误差的方差阵为:

式中:σρ2为观测误差的方差阵,一般可认为8 个未知数观测为独立分布,因此σρ2是对角方阵。参照GNSS 的DOP 分析方法,可以定义位置精度衰减因子(Position Dilution of Precision,PDOP)和几何精度衰减因子(Geometric Dilution of Precision,GDOP):
式中:Dii为方差阵的第i个对角元素。与传统GNSS 的4 星定位相比,图1 中的数据链节点B可以拓展为一颗卫星,对A进行定位。实际作战场景中,节点A和B的水平高度接近,相对卫星视线矢量构成较大的角度差,有利于改善DOP值。
1.2 北斗3 星观测+数据链3 节点绝对定位
当数据链节点数量增加至3 后,可同理构建观测方程。假定3 节点分别可观测3 颗卫星,如图2所示,实际场景中3 节点观测的3 颗星可能重合。

图2 北斗3 星+数据链3 节点绝对定位
3 个节点A、B、C分别收到3 颗卫星形成的有效观测,均无法完成北斗独立定位。形成的伪距观测方差为:

式中:ρAi、ρBi、ρCi为节点A、B、C与卫星i之间的伪距;Pi为卫星i在ECEF 坐标中的位置矢量;PA、PB、PC为待求解的定位矢量;c为光速;ΔtA、ΔtB、ΔtC为3 个节点的北斗钟差;εi为节点A、B、C的伪距观测误差。
当数据链进入精同步时,3 个节点间利用RTT原理可实现相对测距和校时。假定每个节点的数据链与北斗卫星已实现同源,则数据链可实现如下变量的测量:
式中:ρAB为节点A、B的距离;ρBC为节点B、C的距离;ρCA为节点A、C的距离;εAB、εBC、εCA分别为A、B、C两两之间伪距的观测误差;δtAB为节点A、B的测量钟差;δtBC为节点B、C的测量钟差;εtAB、εtBC为时间观测误差。
结合上述两组方程,理论上即可唯一求解3 节点的真实位置。B和C节点的钟差可由它们相对A节点的钟差导出,不属于独立方程,因此不再列出。由于上述方程为非线性方程组,需采用迭代方法求解。
同理分析在稳定点附近的误差传播方程为:

由式(14)可知,3 星3 节点共可获得15 个观测量,其中第14 和15 行关于钟差变量是冗余的,实际可提供14 个独立的误差观测方程,未知变量为12 个,因此3 节点3 星观测为超定非线性方程组。同理可定义3 节点的定位DOP值为:

式中:Dii为(HTH)-1的第i个对角元素。
2 仿真分析
为仿真少于4 颗星的定位,假定在实际场景中,只有仰角最高的3 颗星可正常接收,分析一周回访时间内的PDOP值。A数据链节点纬度、经度和高程为(北纬50°,东经90°,0),B节点在P节点东北天坐标系中的坐标为(100 km,100 km,1 km),C节点在A节点东北天坐标系中的坐标为(-100 km,100 km,-1 km)。为便于比对,仿真仰角最高的4 颗星对节点P定位时的DOP值。4星+单节点、3 星+2 节点、3 星+3 节点的仿真结果如图3、图4 及图5 所示。
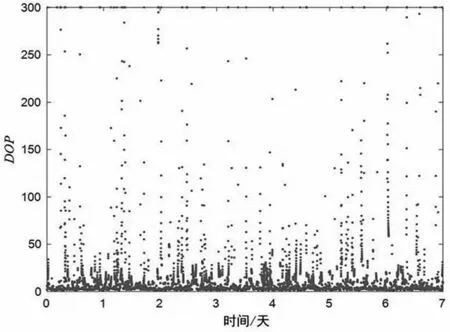
图3 4 星+单数据链节点定位的PDOP

图4 3 星+2 数据链节点定位的PDOP
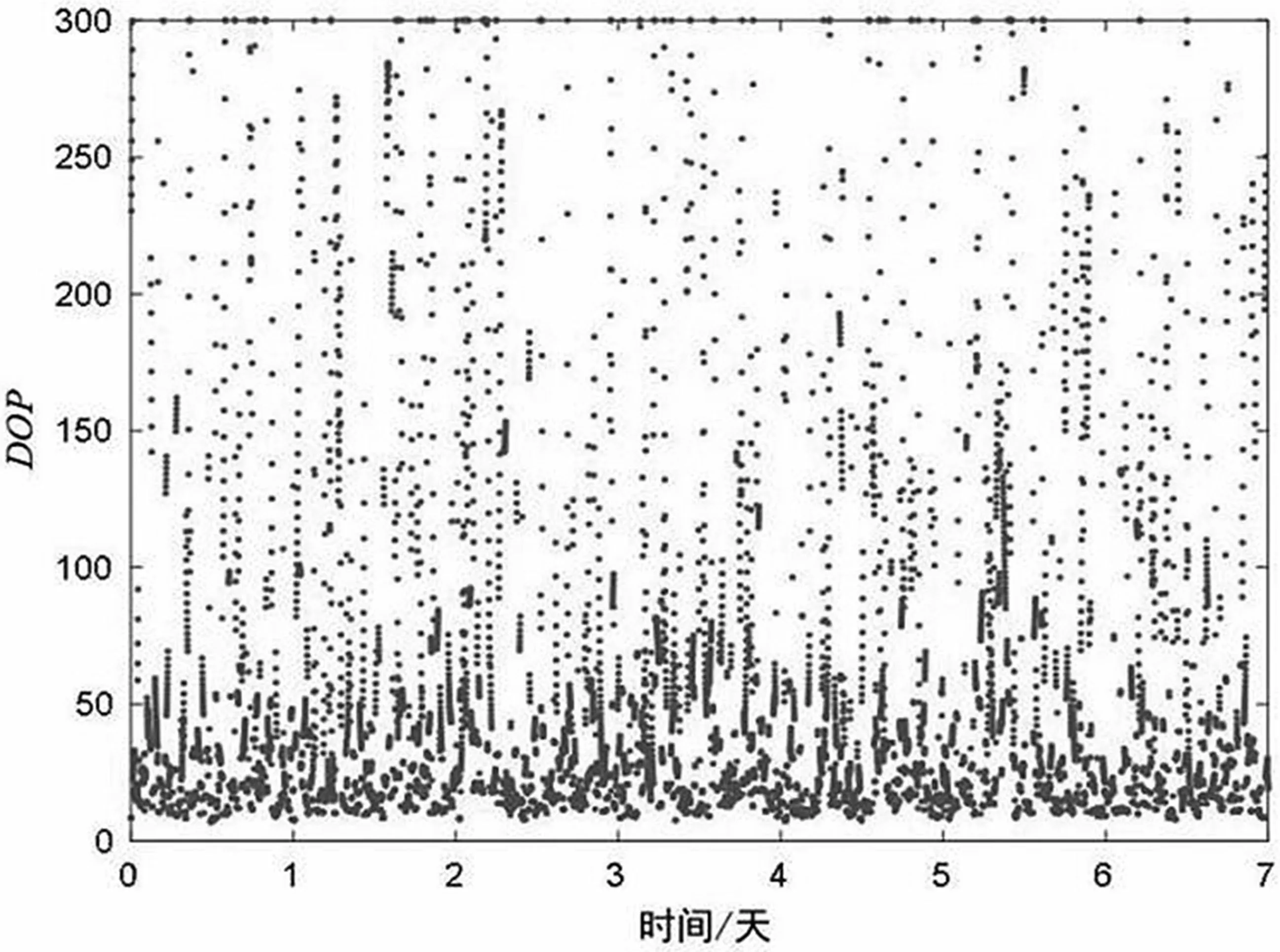
图5 3 星+3 数据链节点定位的PDOP
可以看出,该场景下PDOP值相比传统多星GNSS 定位出现了显著恶化,这是由于仿真中始终只选取仰角最高的4 颗星,当4 颗高仰角卫星较为聚集时,一样会出现DOP值的严重恶化。
为评估可用性,对PDOP值的累计概率分布进行分析,图6 表示PDOP小于横轴取值的概率,可以看出由于卫星数量从4 颗减少到3 颗,PDOP值分布整体恶化。
从图6 可以看出,3 节点相对2 节点的PDOP有少量改善。以北斗三号典型PDOP<4 时定位误差小于10 m 分析,3 星3 节点时,PDOP恶化至100,对应定位误差恶化至250 m 的概率在90%。

图6 累计PDOP 概率比较
3 结语
本文采用数据链与北斗卫星组合导航技术以保证战时干扰环境下的连续导航定位能力。当不使用本文提出的组合定位时,数据链和北斗导航系统各自都无法在3 星观测条件下得到绝对定位结果,均只能得到相对定位结果,这对需要绝对定位的远程目标打击等来说是非常不利的。仿真结果表明,本文方法的定位精度虽然有所恶化,但对于战略打击武器,以及海上大型舰船等典型全球导航平台而言是比较有意义的。本文给出了北斗卫星观测条件不足的情况下由数据链辅助来实现绝对定位的方法,后续还需针对如何提高数据链和北斗卫星组合导航定位精度,以及高动态情况下如何保证定位精度进行研究。
