基于网络RTK 的无人测量船在填海工程中的应用
2022-03-12于友帅喻焕章
于友帅,喻焕章
(中交广州航道局有限公司,广东 广州 510290)
0 引言
随着GNSS 技术的不断发展和完善,实时动态定位技术(RTK)以定位速度快、精度高的特点广泛应用于各种测量中,而连续运行参考站系统(CORS)则将RTK 技术与互联网技术相结合,通过无线通信网络将差分数据实时发送给用户。随着科技的发展,近些年来,以无人载具为载体,搭载多种测量仪器的智能化测量系统越来越受到人们的关注,而无人测量船系统就是一种将无人船船体、GNSS 定位设备、水深测量设备相结合的智能化水深测量系统。
本文通过介绍Ocean α SL40 全自动无人测量船系统在香港国际机场第三跑道填海工程(简称香港三跑工程)中利用香港卫星定位参考站网获取网络RTK 差分信号进行无验潮水深测量的应用情况,展现了基于网络RTK 的无人测量船系统水深测量的高精度性及在特殊水域环境下良好的适应性,为城市填海工程水深测量方法提供了更加丰富的选择。
1 工程特点及难点
香港三跑工程是一个超大型的填海造地工程,成陆面积达650 万m2。本项目采取非浚挖式回填施工工艺,为确保海床的稳定性,回填施工设有严格的分层限制。回填施工主要分为砂垫层(原始海床以上2 m)、砂垫层~-1 mPD(香港高程基准面)、-1~+2.5 mPD、+2.5 mPD~设计标高4 个阶段。在完成第二阶段砂垫层~-1 mPD 的回填施工后,施工区内大部分水域低潮时的平均水深已接近1 m,由于回填施工质量控制存在一定的不确定性,施工区内可能存在极浅点。若采取传统的水深测量方法,该回填阶段的水深测量工作必须趁潮进行。由于本项目所处海域潮汐为不规则半日潮,高高潮在时间分布上存在夏秋季多出现在昼间,春冬季多出现在夜间的特点,测量工作的组织存在一定的不确定性。在项目的施工过程中,由于工程设计要求和施工组织安排等原因,施工区内会形成一些半封闭、封闭水域。此类水域无传统测量船只的进出通道,为测量工作的实施增加了一定难度。
2 基于网络RTK 的无人测量船系统的工作原理
鉴于上述工程特点及难点,加之香港地区已有成熟的、免费对用户开放的香港卫星定位参考站网系统,采用基于网络RTK 的Ocean α SL40无人测量船系统进行相关水域水深测量工作。
RTK 无验潮水深测量模式的科学性和准确性已经得到业界的充分认证和认可[1-2]。常规的RTK无验潮水深测量模式多是通过在已知点上架设基准站,通过无线电通讯来获取RTK 改正信号,存在信号覆盖范围小,定位误差随距离增加而增大的不足。而CORS 系统可以通过获取用户位置,自动选择最佳的一组固定参考站,整体改正GPS误差,将高精度的差分信号发送给用户,无需用户自己架设参考站,极大提高了作业效率。通过与CORS 系统结合,使Ocean α SL40 无人测量船系统的测量作业更加精确、高效。
2.1 系统组成
Ocean α SL40 无人测量船系统由无人测量船和岸基控制两大子系统组成,每个子系统又由若干模块组成。
无人测量船子系统由避障模块、导航定位模块、测深模块和船体模块4 个模块组成;岸基控制子系统由终端模块、无线基站模块和遥控器模块3 个模块组成。每个模块都拥有不同的功能,具体情况如图1、图2 所示。

图1 Ocean α SL40 无人测量船的系统组成Fig.1 System composition of Ocean α SL40 unmanned survey boat
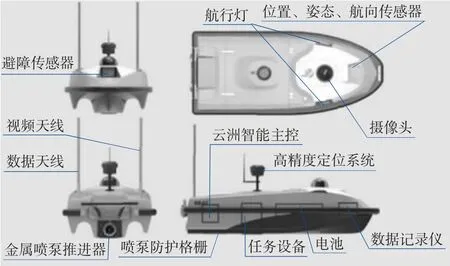
图2 无人船子系统Fig.2 Unmanned boat subsystem
2.2 技术参数及特点
Ocean α SL40 无人测量船系统的主要技术参数见表1。

表1 Ocean α SL40 无人测量船系统技术参数表Table 1 Ocean α SL40 unmanned survey boat system technical parameters
Ocean α SL40 无人测量船系统测深探头使用主机与换能器一体化集成的SDE-18S 高精度测深传感器,搭配测量软件能够实时获取水深数据。
2.3 网络RTK 无验潮测量原理
香港卫星定位参考站网是一套非常成熟的CORS 系统[3],由18 个平均分布于全港各处的连续运行的参考站组成,每天24 h 为用户提供免费的高精度定位服务,用户只需要向地政署申请通道账号,连接互联网,便可获得网络RTK 改正信号。
Ocean α SL40 无人测量船系统搭载了一台高精度的GNSS 接收机,可以通过插入SIM 卡,设置好通道数据链便能够接收香港卫星定位参考站网发出的网络RTK 差分信号,便可以进行无验潮水深测量。无验潮水深测量避免了潮位观测带来的限制和误差,也减少了动吃水和涌浪对测量精度的影响[4]。无人测量船系统利用网络RTK 差分信号进行无验潮水深测量的原理如图3 所示。

图3 无人测量船系统基于网络RTK 测量原理图Fig.3 Survey schematic diagram of unmanned survey boat system based on network RTK
GNSS 接收机通过接收网络RTK 信号来获得某一时刻的瞬时位置,包括平面位置和大地高H0。该时刻换能器至水底面的距离S 按公式(1)计算:

式中:t 为在对应的时刻测深仪通过计算发射波束和接受波束的时间间隔,s;v 为声波在水中的传播速度,m/s。
如果GNSS 接收机获取的定位数据和测深仪获取的水深数据之间的时间延迟足够小[5],那么此时水底面相对于似大地水准面的高程H 按公式(2)计算:

式中:h 为已知的GNSS 接收机相位中心至换能器的距离,m;H0为大地高,m;ξ 为高程异常值,m。
由于GNSS 接收机能够以一定的频率实时获取包含高程异常值改正ξ 的高程数据,那么所测海底面的高程也可以实时获得。
3 无人测量船系统在香港三跑工程中的应用情况
3.1 应用流程
Ocean α SL40 无人测量船系统在香港三跑工程的应用流程包括测区分析、计划测线布设、测量实施、测量成果获取,应用流程图如图4 所示。
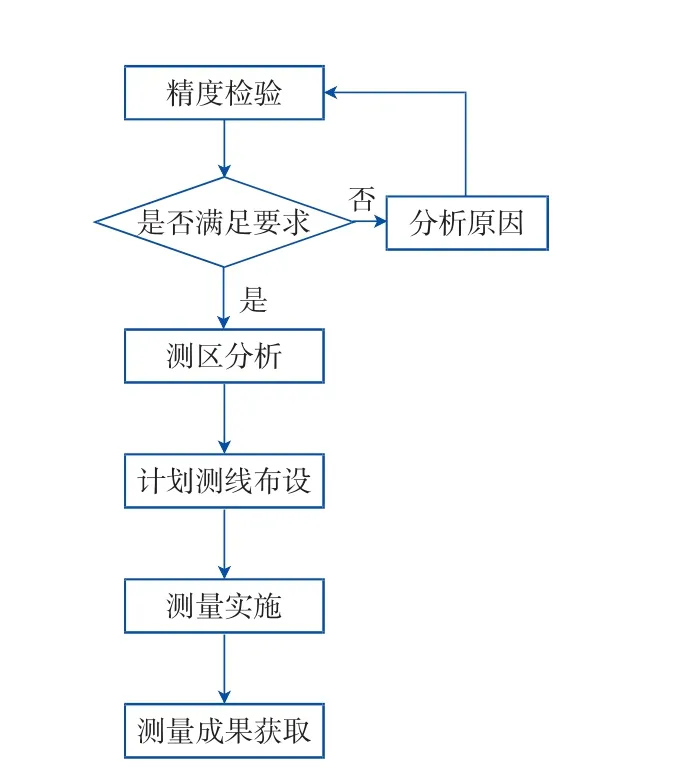
图4 应用流程图Fig.4 Flow chart of application
3.2 精度检验
为检验Ocean α SL40 无人测量船系统在香港三跑工程中利用香港卫星定位参考站网进行网络RTK 无验潮水深测量的精度情况,现通过Reason T50-P 多波束测深系统对其进行了外符合的精度检验[6]。
具体实施过程为:首先选择一处水面平静、无明显外界因素影响的水域,选取其中约100 m×100 m 的区域作为测区,绘制测线,先后使用多波束(测量前已按规范安装姿态校准改正[7])和无人测量船系统在网络RTK 模式下对该区域进行无验潮水深测量,获取水深数据后使用相应的数据处理软件进行数据后处理,获得改正后的水深数据,由于两次水深测量是在相同环境下连续进行的,已在最大程度上减少了环境误差的影响,提高检验的准确性。
内业数据处理完成后,使用数据分析软件对2 份水深数据进行分析,设置数据重叠模糊度为0.2 m,即视2 份水深数据中平面距离小于0.2 m的水深点为同一水深点,进行数据比对,分析结果见表2。比对结果显示水深中误差为0.083 m,完全满足工程精度要求。

表2 误差分析表Table 2 Error analysis table
3.3 测区分析
明确测量任务后,需要对测区进行测前踏勘,以熟悉测区状况。根据已有测量水深、施工进度图等资料,了解测区位置、测区面积、测区周边施工情况,选择合适的架设岸基控制系统位置。Ocean α SL40 无人测量船岸基控制系统数据通讯距离为2 km,岸基控制系统的布置应尽量保证最大化的覆盖测区,减少架设次数。
通过了解测区大致水深情况,是否存在极浅点以及极浅点的位置等信息,尽可能规避无人测量船系统作业时的风险,为后续计划测线的布设和测量的顺利实施奠定基础。
3.4 计划测线布设及测量实施
Ocean α SL40 无人测量船系统在香港三跑工程中的应用主要为砂垫层~-1 mPD 回填阶段的水深测量及特殊水域的水深测量。
测量实施前需布设计划测线。计划测线布设时应充分结合测区情况,主测线的方向应垂直于等深线的方向,测线间隔需视出图比例而定,原则上[8]为图上距离的1~2 cm,可根据任务需求进行加密或者抽稀。还需布设一定数量的检查线,方向尽可能与主测线垂直,均匀分布,能普遍检查主测线,其总长度不得短于主测线总长度的5%。对于测区中已明确的可能影响无人测量船系统作业的因素需要在计划测线布设时进行避让。
3.4.1 浅水水深测量
利用Ocean α SL40 无人测量船系统进行浅水水深测量时,首先在预定位置架设岸基控制系统,岸基控制系统应尽量架设在高处,以保障数据通讯畅通。然后配置GNSS 接收机,连接至香港卫星参考站网,获取网络RTK 改正信号。之后通过移动终端里的测量软件选定初始测线,启动无人测量船系统的自动测量模式,自动测量模式下无人测量船会以2.5 m/s 的工作航速从设定的初始测线开始,自动完成相邻测线间的串联,按序依次完成所有测线的测量。
在无人测量船收集数据的同时,测量人员需通过移动终端观察数据质量,对于存在明显数据异常的区域应进行补测或重测。若测区中存在无人测量船系统自动测量模式无法覆盖的复杂区域,如近岸区域或障碍物较多的区域等,最终需由测量人员通过遥控器手动控制无人测量船完成补测。
以2020年7月某次对C3、C6、C7、D3 区砂垫层~-1 mPD 施工后的水深测量为例。测量面积约为36 万m2,测线间隔为10 m,测线总长度超过35 km,总测量时间约为5 h,所测得最浅点为0.35 mPD,测线及岸基控制系统布设情况如图5所示。
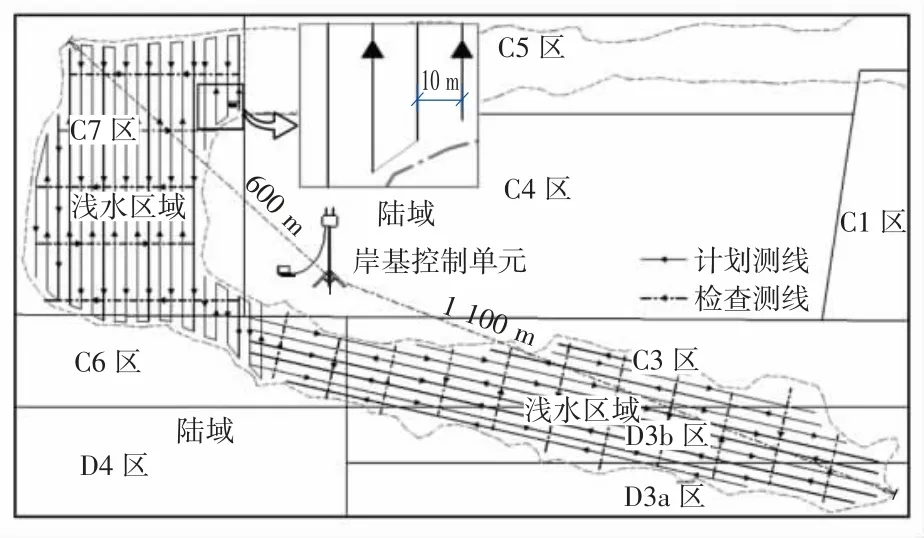
图5 测线及岸基控制系统布设示意图Fig.5 Layout diagram of runline and shore-based control system
3.4.2 特殊水域测量
香港三跑工程施工区与现有机场之间留有一条狭长的水道,为现有机场排水所用,且无传统载人测量船舶进出通道。受回填施工影响,该排水通道存在淤塞的风险,按照要求需每月对其进行水深监测,以保证排水通畅。
该水域分为东西两部分,西侧长约1800 m,为半封闭水域;东侧长约1900 m,为封闭水域。南北宽在高潮时约为30 m,低潮时约为20 m,形状狭长,水域内无明显障碍物,适合无人测量船系统自动模式测量。
该水域应用Ocean α SL40 无人测量船系统进行测量时,沿水道伸展方向布设主测线,主测线间隔为5 m,同样在主测线的垂直方向布设一定数量的检查测线。由于测区东西跨度过大,分别在西侧、东侧架设岸基控制单元以使通讯信号覆盖整个测区。测量作业实施过程与浅水水深测量基本相同,单次测量时间约为3 h。截至2020年12月,共对该水域进行了8 次水深监测,有效地对排水通道的水深情况进行了监控,确保了排水畅通,为机场排水系统的正常运行提供了保障。
4 结语
在香港三跑工程中通过将无人测量船系统与香港卫星定位参考站网的结合,充分发挥出无人测量船系统测量精度高、设备吃水小、作业灵活的特点,有效地解决了浅水水域和特殊水域环境下的水深测量难题,为工程的顺利实施提供了保障。随着内地各城市CORS 系统的逐渐完善,本文也为其他类似填海工程的水深测量作业提供了更加丰富的选择,具有较好参考意义。
