窗口玻璃畸变校正下的自由飞模型姿态测量技术研究
2022-03-11许晓斌马晓宇
陈 磊,徐 洋,许晓斌,朱 涛,马晓宇,谢 飞,何 超
(中国空气动力研究与发展中心 超高速空气动力研究所,四川 绵阳 621000)
1 引 言
大攻角和带侧滑情况下的机动飞行大大扩展了现代飞行器的飞行包线,但该条件下出现的非线性流动现象会对飞行器动稳定性产生强烈影响,降低飞行品质。目前,国内外针对飞行器的动稳定性研究主要依靠空中飞行试验和地面风洞模拟试验[1-3]。考虑到经济性与实用性,风洞试验是最常用的测试手段。此外,风洞自由飞试验因模型无支架干扰、无机械阻尼的优势,保证了风洞试验与飞行状态的动力学相似,更加真实地再现了飞行器连续运动中的动态气动特性[4-5]。在自由飞试验中,定量或定性研究模型在流场中的气动特性,需先通过高速测量系统实时记录模型飞行轨迹,而后判读模型运动轨迹、姿态以及质量特性参数,进而推算模型所受气动力。因此,运动轨迹记录及运动姿态判读是获取气动力数据的前提,更是试验数据修正的重要环节[6]。
目前,模型自由飞运动姿态的测量方法包括模型内部的传感器法以及模型外部的光学测量法[7]。前者可通过姿态角传感器及加速度传感器,遥测获取模型姿态数据。文献[8]利用此方法,得出了有色噪声情况下的模型姿态参数估计精度;文献[9-11]都通过各类传感器进行信息融合测量。此类方法在制作模型时需要预留安装空间,而且测量信息有限。另外,在高超声速风洞开展自由飞试验时,模型尺寸较小,且对其质量特性偏差要求高,无法在模型内部安装传感器测量姿态。因此,非接触式的双目视觉测量技术在模型姿态测量方面得到广泛应用。文献[12]针对飞行器模型的大范围移动问题,在绳牵引并联机器人支撑方式下,发展了一种基于双目视觉的姿态测量方法,动态测量时角度精度可达到0.1°的量级,但文中未具体给出动态试验时风洞的运行参数;文献[13]研究了在靶场中飞行目标的姿态测量问题,总结了国内外姿态测量方面的研究进展,分析了基于视觉的姿态测量方法;文献[14]则介绍了美国31-inch Mach 10 风洞中使用两个分辨率为1 392×1 040 pixel 的摄像机组成的姿态测量系统,在-5°~10°的测量范围内的最大测量误差为0.1°。上述研究工作表明非接触式视觉三维测量是风洞试验模型三维姿态测量的研究热点,但高超声速风洞试验段内存在强烈的气压突变和气流冲击,为了保护相机传感器,需要将视觉三维测量系统放置在试验段外,通过风洞外壁上的窗口玻璃进行测量。然而,窗口玻璃通常较厚,将导致严重的成像畸变,大幅度降低测量精度。
2 双目视觉测量技术
2.1 基本原理
图1 为双目视觉测量的理论模型。假定两个相机的位置己标定,光心都在图像中心,两相机水平和垂直方向放大倍率一致,其中一个相机坐标系与世界坐标系重合,两者坐标系与各对应轴精确平行[15]。在图1 中,利用同一特征点P在左右两个图像平面上形成的视差可以测出该特征点P的深度信息。如图1 所示,两相机投影中心连线距离为b(基线距),相机L和相机R的焦距均为f。在三维空间中,被测物体上任意一点P在左右相机成像平面上的像点分别为PL和PR;左右相机的光轴与像平面的交点分别记为OL和OR。
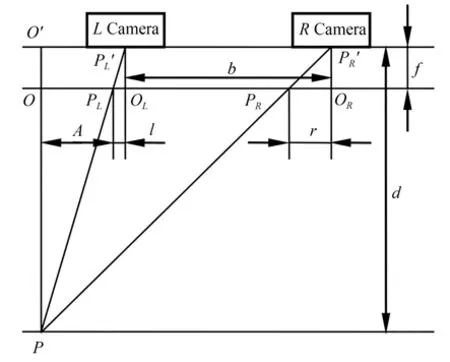
图1 双目视觉测量理论模型Fig.1 Theoretical model of binocular vision
设|PLOL|=l,|PROR|=r,|PLO|=A。根据三角几何关系可知,图中△PPLO∽△PPL'O',可以得到下面关系:

又因△PPRO∽△PPR'O',得:

根据式(1)和式(2),可以计算得到图中A的值为:
将式(3)代入式(1)和式(2),得特征点P到相机光心平面的垂直距离d为:

其中,(r-l)表示标准双目视觉的视差。以深度信息为基础,利用相机的参数(经标定出的内参数和外参数)数值,可以将被测物体表面点的二维图像坐标利用上式转换为三维世界坐标系坐标。
2.2 试验条件与成像畸变分析
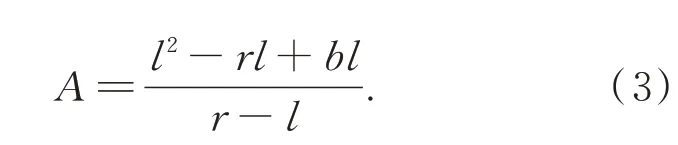
为了测量自由飞模型的轨迹与姿态,搭建的双目视觉测量系统包括:高功率LED 照明光源系统、两台高速相机(Photron-FASTCAMSA1.1)和控制电脑,试验光路原理图如图2 所示。高速相机和照明光源安装在试验段外原有的纹影设备基础上,通过纹影窗口玻璃观测模型,采用此布局的优点是:(1)不会干扰风洞流场;(2)防止因风洞开/关车时气压突变带来的冲击对测量系统产生影响;(3)减小吹风时试验段内部振动对成像质量的影响。现场搭建照明光源和高速相机照片如图3 所示。
图2 模型姿态测量系统光路原理图(俯视)Fig.2 Light path diagram of model attitude measurement system(top view)

图3 光源和高速相机Fig.3 Light source and high speed camera
由几何光学基本定律可知,光线在同一均匀透明介质中沿直线传播,但当介质的折射率发生变化时,光线会朝着较高折射率区域偏折[16]。如图2 所示,本双目视觉测量系统前方存在Φ500 mm×70 mm 厚的窗口玻璃,由于窗口玻璃和相机光轴不垂直,且和两个相机光轴夹角不相同,造成在测量范围内,不同位置的测量对象,经过窗口玻璃折射后,对两个相机成像产生的畸变效应不同,会直接影响到测量系统重建质量。
在ADS中建立对应的8单元阵列仿真模型,接收通道用放大器行为模型等效,馈电网络使用基于传输线模型的威尔金森功分器级联而成,其中双通道T/R组件的ADS仿真模型如图4所示,阵列模型由双通道T/R组件模型并联而成。通道激励使用同相单音功率源,输入功率为-40 dBm,8路放大器的增益及噪声系数值设置同上,仿真使用AC仿真器对电路网络进行电压和噪声的计算,获得馈电网络共用端(集合口)信号电压0.166∠12.9°V,噪声电压12.1 nV,应用噪声系数定义式(1),得到在加权条件下的等效噪声系数为3.15 dB。ADS仿真中,使用行为模型引入匹配问题和计算误差,因此仿真结果和理论计算有少量误差。
为了说明窗口玻璃产生的成像畸变对测量精度的影响,采用测量标准件的方式进行了试验分析。如图4 所示,在风洞内固定标定板,而后用相机分别在有、无窗口玻璃(玻璃被拆掉)两种情况下采集标定板图像,并解算出这两种情况下标定板上99 个标记点的重建数据。重建结果如图5 所示,其中红色重建点表示无玻璃情况下的重建结果,黑色重建点表示有玻璃情况下的重建结果。
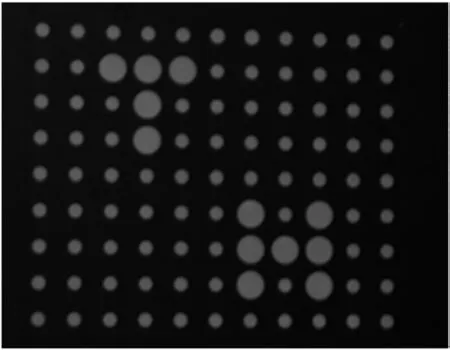
图4 窗口玻璃对双目视觉测量重建结果影响Fig.4 Effect of window glass on reconstruction result of the binocular stereo vision measurement system
由图5 中可以看出,窗口玻璃对双目视觉测量系统重构结果的影响可近似归纳为均匀旋转、平移影响,分析后发现窗口玻璃造成的物空间非均匀性超过了3 mm,即由于窗口玻璃对测量空间内不同测量位置产生的畸变效应不同,处在同一个(标定板)平面上的点经过窗口玻璃折射后,解算出的三维重构点已不在一个平面上了,其中,最大偏移量超过了3 mm。
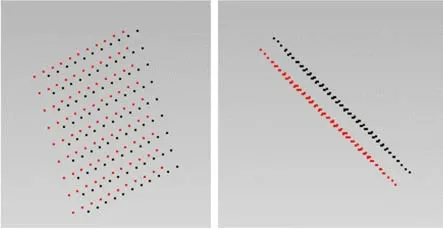
图5 有无窗口玻璃下的标记点重建结果Fig.5 Reconstruction results with or without glass
3 畸变模型校正
根据上述试验分析,窗口玻璃引起的成像畸变对测量精度有较大影响,为了探索这一影响的规律,分别在有、无玻璃两种情况下,对采集到的标定板重构图像中标记点数据进行分析。图6 给出了玻璃对图像标记点提取坐标的影响,当存在玻璃时,左右图像点均向双相机的中间靠拢,同时对应的空间三维点在景深方向的距离变小(标定板上的标记点到相机的距离变近),即当存在玻璃时,左右图像存在向中间偏移的趋势。此外,玻璃引起左右图像点的u、v坐标随着各自u、v值而呈现线性的畸变影响,因此本文提出基于畸变特征点线性拟合的玻璃畸变建模与校正方法:假定(u,v)表示无玻璃时的理想图像点坐标,(u',v')表示有玻璃时的畸变图像点坐标,从而可针对有玻璃时图像点坐标进行一个线性校正,将减小玻璃折射引起的图像畸变。

图6 玻璃对左右图像点引起的偏移Fig.6 Offset caused by glass in the images
根据在试验现场采集的图像,通过与无玻璃时提取到的理想图像点进行比较分析和线性拟合,得到如下线性关系:
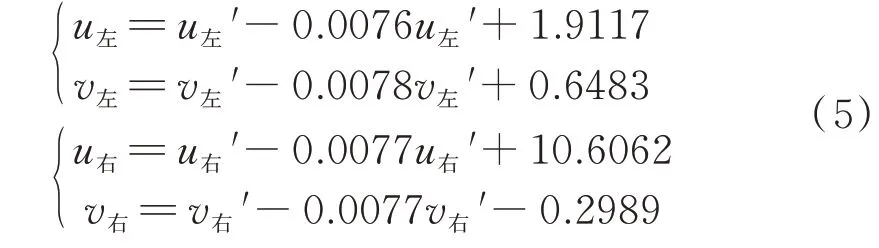
根据上述畸变校正关系式,对有玻璃时采集的图像点进行校正。针对左相机拍摄的有玻璃图像按照左图像校正关系式进行校正,校正结果与无玻璃时的理想图像点进行对比后得到如图7所示的校正效果。
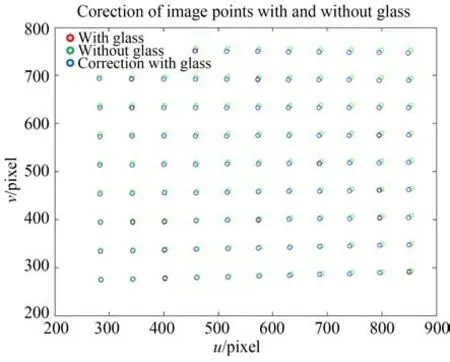
图7 左图像校正前后的图像点比较Fig.7 Comparison of the image points before and after correction of the left image
校正前后与理想坐标偏差对比情况如图8 所示。针对右测相机拍摄的有玻璃图像,按照右图像校正关系加以校正。当有玻璃存在时,采集的图像点相对于无玻璃时会发生1~10 pixel 的偏移,偏差均值为5.4 pixel;基于标记点线性拟合的校正方法可以将存在玻璃时采集的图像点修正为近似理想图像点,修正后的图像点与理想点之间仅存在0.01~0.3 pixel 的偏移,偏差均值缩减至0.1 pixel。
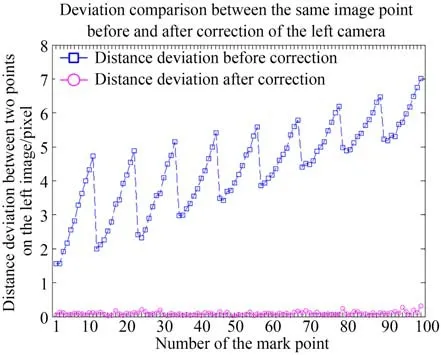
图8 有玻璃时图像校正前后与理想值偏差Fig.8 Bias between the correction and the ideal value of the image with glass
根据校正结果可知,试验场景物空间1 m 约对应于像空间1 000 pixel,即物空间1 mm 对应像面上的1 pixel,从而可推算所提校正方法对应的三维误差应在0.01~0.3 mm 之间,且误差均值为0.1 mm。
4 风洞试验
模型自由飞试验在中国空气动力研究与发展中心Φ1 m 高超声速风洞上完成,风洞来流名义马赫数为5,总压0.5 MPa。试验模型外形如图9 所示,分为尖锥和钝锥。每种外形模型各有两种材质:超硬铝和碳纤维,质量相近(200 g 左右),碳纤维模型惯矩较铝模型惯矩约小20%,编码标记点尺寸为12 mm×12 mm。
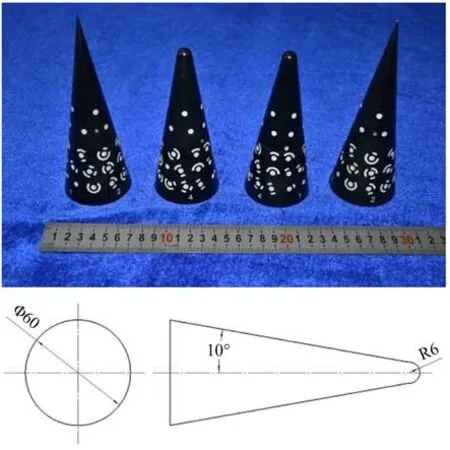
图9 尖锥及钝锥模型Fig.9 Pointed cone and blunt cone model
4.1 视觉测量系统测量精度考核
采取地面考核的方法,对双目视觉测量系统测量精度的进行测试。试验场景如图10 所示,分别在窗口玻璃畸变校正前和校正后,用模型姿态控制机构给出模型几个准确的姿态信息,其中控制机构的位移(x,y,z)精度优于0.01 mm,角度(α,β,γ)精度优于0.01°;测量坐标系按照《GJB 4399-2002》进行建立,x,y,z分别表示模型在轴向、法向以及侧向的位移,α,β,γ分别表示模型的攻角、侧滑角和滚转角;利用双目视觉测量系统对模型姿态进行测量,获取的结果与模型姿态控制机构给进量进行对比,从而达到对视觉测量系统的硬件(不同尺寸模型表面标记点的设计以及布置、成像系统镜头、两台相机采集时差、相机支撑架受到周围环境变化而导致变形等)以及软件算法的考核以及优化的目的。

图10 双目视觉测量系统解算精度验证试验场景Fig.10 Experiment environment of measurement accuracy of the binocular vision technology
由于受到试验条件的限制(窗口玻璃通光口径Φ=500 mm),视觉测量系统两相机的基线距离小于0.4 m,相机与被测模型之间测量距离为1.8 m,两者之比小于0.25,根据文献[17]分析可知,在这种结构尺寸下,系统在z和β两个自由度的测量精度最差,因此需要重点考核这两个自由度的测量精度。表1 为视觉测量系统在窗口玻璃畸变校正前和校正后的测量误差结果,可以看出在玻璃畸变校正前,z方向的最大测量误差(绝对值)为1.81 mm,β方向的最大测量误差(绝对值)为1.61°,而校正后z方向的最大测量误差(绝对值)为0.38 mm,β方向的最大测量误差(绝对值)为0.44°。说明该校正方法能有效提高系统的测量精度,玻璃畸变经过校正后,系统在位移方面的测量误差(绝对值)小于0.5 mm,在角度方面的测量误差(绝对值)小于0.5°,可满足轴对称模型后续气动数据分析的要求,同时也验证了所提校正方案及搭建的测试系统的有效性。

表1 视觉测量系统测量误差Tab.1 Error of the vision measurement system
4.2 风洞试验
图11 为自由飞试验过程中圆锥模型飞行轨迹的部分照片,照片间隔10 ms。可以看出,高速相机有效捕获了模型自由飞运动过程,模型成像清晰稳定,并未出现像面抖动等影响测量结果的情况。图12 为模型发射过程的纹影图像,采样间隔5 ms。
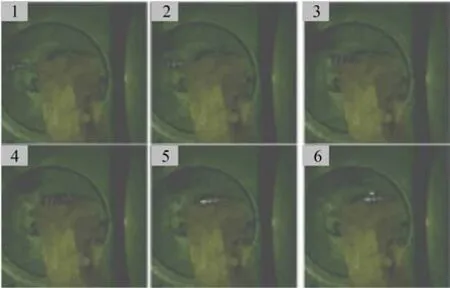
图11 高速相机拍摄下模型飞行过程Fig.11 Model flight process in high-speed camera view
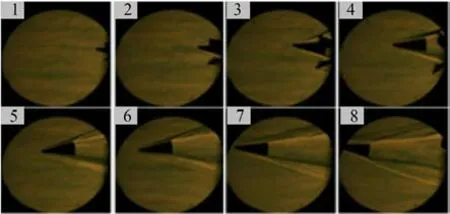
图12 纹影相机拍摄下模型飞行过程Fig.12 Model flight process in schlieren camera view
由图12 可以看出,试验过程中,风洞运行参数稳定,模型周围激波清晰,无振荡情况出现,由此说明此次试验效果良好,可验证上文所提的校正方法。图13 为解算出的各个时刻模型姿态测量结果。
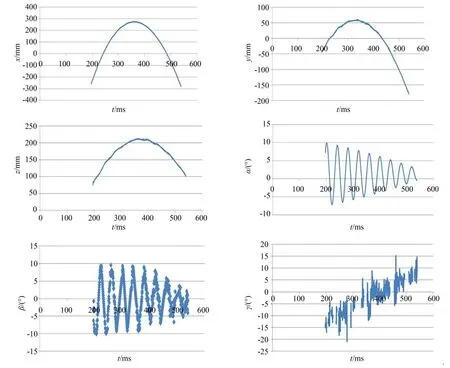
图13 自由飞模型姿态测量结果Fig.13 Free fight model attitude measurement results
由图13 可以看出,双目视觉测量系统在风洞运行环境下,成功结算出圆锥模型的姿态信息,说明改进方法可有效提高模型姿态数据的测量精度。其中,模型的攻角(α)数据曲线的光滑无明显跳点,其运动周期数达到了8 个(通常,模型运动周期数大于2 时,可以得到准确的动稳定导数[4],模型运动周期数越多,试验结果越好),满足后续气动数据分析的需求。
5 结 论
为了在高超声速风洞模型自由飞过程中准确测试模型姿态,在Φ1 m 高超声速风洞现场搭建了双目视觉的风洞模型姿态测量系统。为了减小窗口玻璃畸变对测量结果的影响,提出了基于标记点线性拟合的玻璃畸变校正方法,并给出了畸变校正关系式。通过试验验证,校正方法可将修正后的图像偏差均值缩减至0.1 pixel,即当测量范围为1 m×1 m×1 m 时,测量精度优于0.5 mm,满足后续气动数据分析的要求。
