基于旁瓣光束衍射反演的强激光远场焦斑测量方法
2022-03-11王拯洲魏际同弋东驰王亚军
王拯洲,王 力,魏际同,王 伟,李 刚,弋东驰,王亚军
(中国科学院 西安光学精密机械研究所,陕西 西安 710119)
1 引 言
某大科学装置是我国开展高能量密度物理和惯性约束聚变(ICF)研究的首台十万焦耳量级高功率激光装置[1],位于该激光装置末端的综合诊断系统是一个多功能、高精度的激光参量诊断平台,用来精密诊断激光装置输出光束的特性,包括能量、近场、远场、时间波形、波前分布等。该装置的终极目标是基于纹影法的原理实现强激光远场焦斑光强分布的测量,为未来频率转换组件研究[2]和强激光远场焦斑测量提供理论指导和精确实验参数。
对于大型激光装置激光强度时空分布测量方法,国内外的学者也进行了大量的研究工作。国外学者所采用的方法有:CCD 直接测量法[3]、列 阵 相 机 法[4]、间 接 测 量 法[5-6]、数 字 微 镜 器 件法[7]等。2007 年,NIF 装 置 使 用CCD 直 接 成 像法对远场焦斑进行测量[3],所测的旁瓣分布的细节基本上被淹没在图像的本底信号中无法分辨。2008 年,美国Aegis 技术公司使用阵列探测法测试远距离传输的强激光光束的目标靶[4],该方法只适用于测量远距离、大面积、连续辐射、高能量的激光光束的光强分布。2008 年和2012 年,罗切斯特大学设计的OMEGAEP 焦斑诊断系统[5-6]使用间接测量法实现远场焦斑的测量,该方法为大型激光装置远场焦斑的精确测量提供了另外一种思路。2012 年,Fiorito R B 等人使用数字微镜器件法实现焦斑的测量[7],该方法需要根据CCD 实际的光斑分布划分“遮挡”区域来确定反射型的掩模,不适用于大型激光装置单发次、高能量、非连续辐射激光光束远场焦斑的测量。
国内学者提出的主要方法为纹影法[8]、衍射光栅法[9]、正交光楔法[10]、列阵相机法[11]等。2006年,程娟等人将纹影法应用于强激光远场焦斑测量[8],并简要介绍了纹影法测量的原理。2012年,贺元兴等人提出的基于衍射光栅的焦斑重构和远场测量方法[9]和正交光楔激光远场焦斑测量方法[10],由于探测CCD 噪声的影响,这两种方法对旁瓣区域弱信号探测效果较差。2013 年,周继权等人使用列阵相机法[11]对不同曝光的多幅图像的配准来合成高动态范围的图像,该方法无法适应高功率激光装置一次主发射的实验光束辐射进行多次曝光。2018 年,李铭开展了基于光场相机的远场焦斑测量实验的研究[12],证实了光场结构测量结果的有效性,但实验中焦斑重构算法缺乏针对于焦斑能量分布恢复的精细化改进。对于强激光远场焦斑测量数学模型的研究,王拯洲和夏彦文等人做了大量的工作,并于2014 年和2016 年提出了高动态范围激光焦斑测量数学模型[13-14],以图像的标准差作为噪声对实验数据进行分析,获得了高动态范围远场焦斑的重构图像;2017 年,提出了基于纹影的远场焦斑测量和自动重构方法[15],该方法只合适主瓣图像存在明显纹理的图像和能量放大倍率K小于10 的情况;2020 年,提出了基于远场焦斑测量数学模型改进的CNN 去噪方法[16],将DnCNN 去噪算法引入数学模型中,改进原有DnCNN 去噪算法的不足,提高了基于纹影的高动态范围远场焦斑测量的可信度。
随着大型激光装置的建成和物理实验的逐步深入开展,该装置主要存在的远场焦斑强信号、弱信号的同时探测这一矛盾和旁瓣光束弱信号区域无法精确测量的问题被发现。针对以上矛盾和问题,本文提出了基于旁瓣光束衍射反演的纹影法强激光远场焦斑测量方法。主要措施为:(1)通过将主光路分束为主瓣和旁瓣光束,主瓣光束被大倍率衰减后使用主瓣CCD 测量主瓣区域强信号区域;旁瓣光束被纹影小球遮挡中心后使用旁瓣CCD 测量旁瓣光束弱信号区域,解决了主瓣强信号和旁瓣弱信号同时测量这一个矛盾;(2)使用基于旁瓣光束衍射反演方法,以旁瓣光束衍射光强图像和相位图像作为输入,通过计算精确还原未遮挡前旁瓣光束各个旁瓣波峰的震荡信号。主要思路为:采用逆向推演间接测量的研究方法,沿光路传播逆方向推导,以旁瓣光束衍射光强图像和相位图像作为输入,通过计算获得未遮挡前旁瓣光束远场焦斑分布。主要研究内容为:(1)构建基于旁瓣光束衍射反演的纹影法强激光远场焦斑测量数学模型,从理论角度揭示该模型的合理性;(2)通过实验仿真旁瓣光束衍射反演的全流程,验证该方法对旁瓣光束弱信号的精确探测的可行性;(3)研究改进DnCNN 去噪算法对强激光远场焦斑测量精度的提升作用。实验结果表明:该方法不仅消除了纹影小球对旁瓣光束衍射的影响,而且获得了旁瓣光束各个波峰的幅值和位置、动态范围比值等远场焦斑测量重要参数。
基于以上研究思路和研究内容,本论文主要拟解决2 个科学问题:(1)构建基于旁瓣光束衍射反演的纹影法强激光远场焦斑测量数学模型,解决旁瓣光束衍射反演对于旁瓣区域弱信号的精确探测问题;(2)解决DnCNN 去噪算法改进对于实验精度提升的问题。通过解决以上科学问题,首先从理论角度揭示该数学模型和旁瓣光束衍射反演方法的合理性,为未来远场焦斑测量提供理论支撑;其次,通过基于DnCNN 的科学级CCD 图像去噪和旁瓣光束纹影小球衍射反演这两个改进措施,为强激光远场焦斑测量的精度提升提供实验验证方法指导。该研究工作的完成不仅对未来大科学激光装置远场焦斑测量在理论上的创新具有重大指导意义,而且为该装置强激光远场焦斑的精确测量奠定了基础。
2 理论背景
2.1 大型激光装置综合诊断系统光学系统改进设计
在大型高功率激光装置综合诊断系统中,光路设计如参考文献[16]中所示,使用分光系统将主光路分为主瓣光路和旁瓣光路。主瓣光路经过大倍率光束衰减器件和主瓣聚焦透镜后使用主瓣CCD 直接采集主瓣光路分布图像;旁瓣光路依次经过旁瓣聚焦透镜1、纹影小球、旁瓣透镜2,最后使用旁瓣CCD 采集旁瓣光路分布图像。该光路设计存在一个理想化的假设,即认为被纹影小球遮挡的旁瓣光束遮挡区域的光强分布为零,认为非遮挡区域的光强分布不变。
然而,根据光学衍射理论可知,旁瓣光束光场的传播在绕过纹影小球这个障碍物后,后面的旁瓣光束光场已经是一个发生了衍射作用的衍射场。当旁瓣光束被纹影小球遮挡后(如图1 中黑色圆),先被纹影小球衍射,再传输至CCD成像位置时,CCD 成像位置的旁瓣衍射光束分布与未遮挡前的旁瓣光束分布已经发生了巨大的变化。根据衍射逆运算理论,反演正确的未遮挡前的旁瓣光束分布,需要以旁瓣光束衍射光强图像和相位图像作为输入。因此,对于原有大型激光装置综合诊断系统的光路设计进行改进,是十分必要的。改进方案如下:在靶点后增加一个旁瓣分束镜splitp,将靶点后的旁瓣光束分为两路,分光比例为1∶1,旁瓣光路1 使用旁瓣CCD 测量旁瓣衍射光束的振幅信息,旁瓣光路2 使用哈特曼传感器测量旁瓣衍射光束的相位信息。将两个旁瓣CCD 采集振幅图像和哈特曼传感器相位结合,使用反演运算获得真正未衍射前的及未遮挡的旁瓣光束分布图像I'IDiff_p(xi,yj)。另外,去掉原有光路中的主瓣透镜lenz 和旁瓣透镜2 lenp2,这样旁瓣CCD 获得直接衍射后的旁瓣衍射光束分布,不需要对原有旁瓣光束沿光路截面方向进行按比例放大,主瓣光束光强分布更加简单。基于旁瓣光束衍射反演的纹影法远场焦斑测量光学设计如图1 所示。
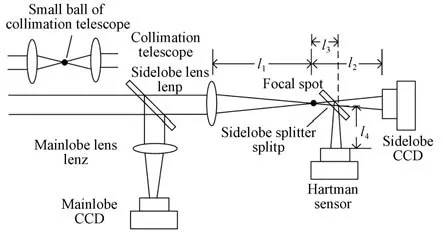
图1 基于旁瓣光束衍射反演的纹影法远场焦斑测量光学设计Fig.1 Optical design for far-field focal spot measurement using schlieren method based on diffraction inversion of sidelobe beam
需要说明是,在光学平台搭建过程中,需要保证旁瓣CCD 和哈特曼传感器距离靶点之间的光程必须相等,如图1 中,用公式表示为l2+l3=l4。
2.2 构建基于旁瓣光束衍射反演的高功率激光远场焦斑测量数学模型
高动态范围激光焦斑测量数学模型最初是由王拯洲等人在文献[13]和[14]中提出来的,该数学模型为强激光远场焦斑测量提供了理论依据,但该数学模型存在一定的不足:(1)未考虑纹影小球遮挡旁瓣光束中心后,因为纹影小球边沿的衍射影响了旁瓣光束光强分布;(2)该数学模型中重构图像的输入为主瓣CCD 和旁瓣CCD 直接采集的图像,未经过有效的去噪处理。为了进一步解决大型激光装置使用纹影法无法实现旁瓣光束弱信号区域光强分布精确测量的问题,本文提出了基于旁瓣光束衍射反演的纹影法强激光远场焦斑测量方法和数学模型,并对该数学模型进行完整的公式推导和分析。
2.2.1 主光路分束
根据夫琅禾费衍射公式,激光远场焦斑强度分布[2]If(x,y)为激光远场复振幅[3]Uf(x,y)取模运算后的平方。令激光远场焦斑强度分布If(x,y)为原始主光路远场光强分布,为了同时分别测量主瓣和旁瓣光强,按照α:β(α+β=1)的分光比例将原始主光路远场光束分为主瓣光束和旁瓣光束,则主瓣光束的焦斑强度分布函数为:

旁瓣光束的焦斑强度分布函数为:

2.2.2 光路衰减
为了使用科学CCD 分别探测主瓣光束和旁瓣光束的光强分布,需要对两个光束的能量分别进行衰减,使得两个光束的能量都衰减至科学CCD 的线性响应区间以内。由于主瓣CCD 用来探测强激光远场焦斑高能量、中心区域的主瓣光束焦斑强度分布,主瓣光束能量必须进行大倍率能量衰减,衰减后的主瓣光束能量只占原始光束能量的0.1%~1%。当主光路光束经过分束、主瓣光束能量衰减后,主瓣光束的焦斑强度分布函数为:

其中,kz为主瓣光束能量衰减系数(0.001<kz<1)。
为了获得旁瓣光束弱信号区域的焦斑强度分布,需要尽可能保留旁瓣光束弱信号区域的光强信号。选取方案是对分束后的旁瓣光束不再经过任何能量衰减,而是使用纹影小球遮挡旁瓣光束中心强信号区域、未遮挡周围弱信号区域的方法,对遮挡和衍射后的旁瓣衍射光束的光强和相位进行测量,作为旁瓣光束衍射反演运算的输入。
则经过分束后的旁瓣光束光强的焦斑强度分布函数为:

其中,kp为旁瓣光束能量衰减系数(kp=1)。
2.2.3 旁瓣光束衍射
使用纹影小球遮挡旁瓣光束的强能量区域使得旁瓣光束产生衍射现象,当衍射后的旁瓣光束传输到CCD 探测位置后,CCD 所采集的旁瓣光束图像是经过纹影小球衍射并随着传输距离分布函数变化后的旁瓣光束分布图像。旁瓣光束衍射需要经过纹影小球遮挡、旁瓣光束分光、旁瓣光束光强衍射和旁瓣光束相位采集3 个步骤。
2.2.3.1 纹影小球遮挡
假设未遮挡前的旁瓣光束分布为IOrg_p(x,y),则纹影小球遮挡位置的旁瓣光束分布IObj_p(x,y)表示为:

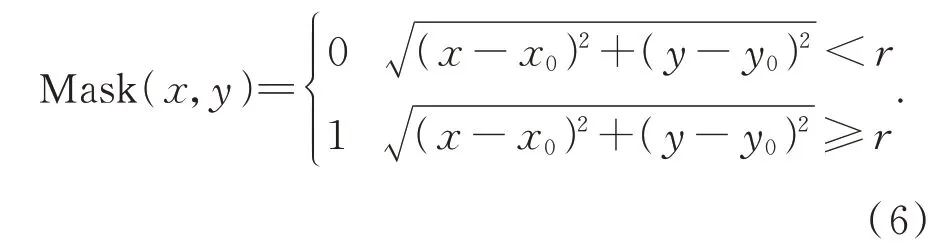
其中,Mash(x,y)为纹影小球遮挡效果的掩膜,当前位置(x,y)距离纹影小球中心(x0,y0)的距离小于纹影小球半径值r,Mask 值为0,否则值为1,用公式表示为:
2.2.3.2 旁瓣衍射光束二次分光
将被纹影小球衍射后的旁瓣光束按照1:1 的比例进行二次分光,如图1 所示,旁瓣衍射光强测量光束分布记为IInt_p(x,y),旁瓣衍射相位测量光束分布为IPh_p(x,y)。

2.2.3.3 旁瓣光束光强衍射和旁瓣光束相位采集
假设衍射后的旁瓣光束传输到CCD 探测位置的距离为z,则CCD 所采集的旁瓣衍射光束分布函数IDiff_p(x,y)表示为[16-17]

其中,UInt_p(x,y)为旁瓣衍射光束光强分布函数IInt_p(x,y)的复振幅表示形式,表示为:

2.2.4 量化
量化的目的是将光束模拟分布函数进行数字化,即使用主瓣CCD 和旁瓣CCD 分别在主瓣光束和旁瓣光束完成图像采集。由于CCD 存在噪声,假设主瓣CCD 和旁瓣CCD 的噪声分布函数分别为nz(x,y)和np(x,y),则包含噪声的主瓣CCD 的分布函数表示为:

由于使用纹影小球遮挡旁瓣光束中心,旁瓣CCD 采集到的分布函数为旁瓣衍射光束分布函数IDiff_p(xi,yj)与旁瓣CCD 噪声np(xi,yj)的叠加,用公式表示为:

2.2.5 去噪
假设CCD 噪声符合随机分布,在准确估计CCD 图像的噪声的情况下,图像去噪处理就是对采集CCD 图像减去噪声的随机估计,用公式表示为:

其中:Iz_dn(xi,yj)和Ip_dn(xi,yj)分别为主瓣图像和旁瓣图像分别减去各自估计噪声后的结果。以上去噪方法是假设主瓣CCD 噪声nz(xi,yj)和旁瓣CCD 噪 声np(xi,yj)被 准 确 估 计 所 采 用 的方法。
使用纹影法对远场焦斑进行测量,由于CCD复杂的噪声特征,使得主瓣和旁瓣图像的强能量区域和弱能量区域噪声完全不同:主瓣光束能量强度高,噪声信号较强;旁瓣光束能量强度低,却包含丰富的旁瓣环状能量分布信息。另外,远场焦斑重构需要对主瓣光束强度同时进行光强放大和衰减倍率放大,没有经过有效去噪的主瓣光束图像噪声被同时放大100~1 000 倍,这将对远场焦斑的重构精度产生巨大的影响。因此,选择有效的去噪算法并根据焦斑测量实验噪声的特点改进去噪算法是十分必要的。令图像去噪过程函数为Denoise,去噪处理后的主瓣光强、旁瓣光强、旁瓣光束波前分布函数表示为:

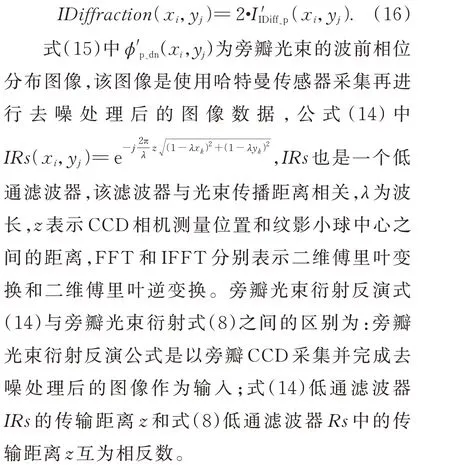
其中:φp(xi,yj)为旁瓣光束使用哈特曼采集的波前相位图像,φ'p_dn(xi,yj)为经过去噪处理后的旁瓣光束波前相位图像。
2.2.6 旁瓣光束衍射反演
为了准确获得未遮挡以前的旁瓣光束分布,就需要以CCD 采集到的旁瓣光束图像I'p_dn(xi,yj)为输入,通过反演运算获得真正未衍射以前的及未遮挡的旁瓣光束分布图像I'IDiff_p(xi,yj),用公式表示为[17-18]:

其中,U'p_dn(xi,yj)为旁瓣光束衍射反演光强分布函 数I'p_dn(xi,yj)的 复 振 幅 表 示 形 式,用 公 式 表示为:
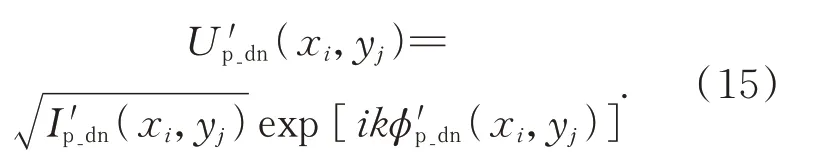
为了同时测量旁瓣光束的光强和波前相位,需要对旁瓣光束进行二次分光,分光比例为1∶1,二次分光前旁瓣光束真实未遮挡前的旁瓣光束光强分布函数为旁瓣光束衍射反演光强分布函数I'IDiff_p(xi,yj)的2 倍数,用公式表示为:
2.2.7 焦斑重构
焦斑重构是纹影法远场焦斑测量的最后一步,就是以主瓣CCD 图像、旁瓣CCD 图像、旁瓣光束相位图像作为输入完成最终远场焦斑的重构操作。远场焦斑重构的基本思路是:重构焦斑主瓣区域使用主瓣光束图像数据光强放大和衰减倍率放大后进行填充,即重构焦斑的主瓣区域光强=去噪后主瓣光强/(kα);重构焦斑旁瓣区域使用旁瓣光束衍射反演数据进行填充,将去噪处理、旁瓣光束衍射反演、纹影小球遮挡区域外的数据作为重构图像旁瓣区域焦斑分布;重构焦斑过渡区域使用主瓣区域数据和旁瓣区域数据按照一定的比例进行填充。
假设主瓣CCD 采集到的主瓣光强图像为Iz(xi,yj),旁瓣CCD 采集到的旁瓣光强图像为Ip(xi,yj),则重构焦斑的分布函数[5]为h(xi,yj):

其中:A、B、C 分别为主瓣光束图像数据填充区域、旁瓣光束图像数据填充区域、使用主瓣光束图像数据和旁瓣光束图像数据拼接时的过渡区域,如图2 所示。在过渡区域C,主瓣图像灰度与旁瓣图像灰度的比值为d1:d2,满足d1+d2=1,0<d1<1,0<d2<1,kz=k。
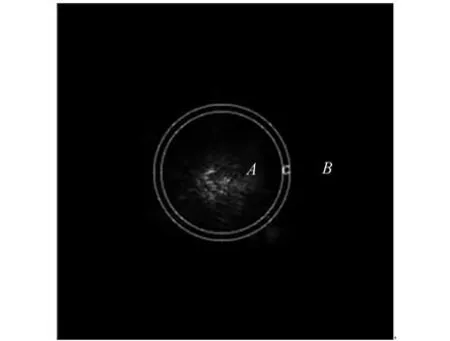
图2 远场焦斑重构不同区域示意图Fig.2 Schematic diagram of different area of far-field focal reconstruction
本文提出的“基于旁瓣光束衍射反演的高功率激光远场焦斑测量数学模型”是基于文献[14]和[16]的基础上提出来的对远场焦斑测量数学模型的优化和改进。相比文献[14],本文数学模型增加了旁瓣光束衍射、去噪、旁瓣光束衍射反演。相比文献[16],本文数学模型增加了旁瓣光束衍射和旁瓣光束衍射反演。相比文献[14]和[16],本文数学模型的主要改进措施为:(1)在旁瓣光束衍射步骤中,增加了旁瓣衍射光束二次分光;(2)在旁瓣光束衍射步骤中增加了旁瓣光束光强衍射和旁瓣光束相位采集;(3)增加旁瓣光束衍射反演过程。主要优点为:(1)可以对旁瓣光束的相位和光强进行同时测量;(2)采用逆向间接测量的方法,以旁瓣光束衍射光强图像和相位图像作为输入,通过计算获得未遮挡前旁瓣光束远场焦斑分布;(3)在构建新的数学模型时,将实际远场焦斑测量实验中的噪声和纹影小球衍射作为影响旁瓣光束光强分布的重要因素,并使用改进的DnCNN 去噪算法和旁瓣光束衍射反演进行消除,以提升强激光远场焦斑测量的实验精度。
3 实验仿真
实验仿真主要模拟强激光远场焦斑测量的实验过程,对基于旁瓣光束衍射反演的强激光远场焦斑测量数学模型的实验过程进行分解,将每一个的实验步骤具体化、实例化,重点关注核心步骤实验数据处理的结果和效果。以核心实验步骤(去噪、旁瓣光束衍射反演和焦斑重构)为重点,处理对应步骤的实验数据,分析改进DnCNN去噪算法和旁瓣光束衍射反演的处理效果,论证旁瓣光束衍射反演对于远场焦斑测量实验可信度和可靠性的提升作用。
基于旁瓣光束衍射反演的强激光远场焦斑测量实验过程共包含7 部分:(1)获取初始实验数据;(2)预处理;(3)旁瓣光束衍射;(4)图像采集和加噪声;(5)去除噪声;(6)旁瓣光束衍射反演;(7)远场焦斑强度分布重构。强激光远场焦斑测量仿真实验数据处理流程如图3 所示。

图3 数据处理流程图Fig.3 Flow chart of data processing
3.1 获取初始实验数据
依据夫琅禾费衍射公式,激光远场焦斑强度分布[19]If(x,y)为激光远场复振幅[20]Uf(x,y)取模运算后的平方,利用Matlab 2016b 模拟生成的远场焦斑图像数据如图4 所示。具体的激光远场焦斑强度分布生成参数包括波长lmda、纹影小球半径a、透镜焦距f,幅值Am,像素尺寸pixel,如表1所示。

表1 激光远场焦斑强度分布仿真实验参数Tab.1 Simulated experimental parameters of far-field focal spot to obtain intensity distribution
图4 中生成的远场焦斑实验数据(初始实验数据)最大值为3 583.6。当y=256 时,旁瓣曲线第一、第二、第三、第四波峰所处位置x分别为214、187、160、133,灰度值分别为62.69、14.88、5.73、2.62。当纹影小球半径大于80 像素时,在旁瓣区域最大灰度值为5.74,均值为0.54。因为初始实验数据旁瓣区域的灰度值为0~15 之间的浮点数,这与12 位科学CCD 的灰度范围(0~4 095)不符。将图4(a)的初始实验数据放大200倍,主要有以下优点:(1)旁瓣光束焦斑强度分布图像的灰度处在12 位科学级CCD 的线性响应区间之内(0~4 095);(2)通过对初始实验数据进行放大处理,旁瓣光束焦斑强度分布图像第一、第二、第三、第四波峰灰度也被等比例放大,特别是提高了第四波峰的信噪比,有利于提升远场重构焦斑动态范围比值的测量精度;(3)有利于仿真和实现基于旁瓣光束衍射反演的强激光远场焦斑测量实验中图像去噪处理、旁瓣光束衍射反演等重要过程。
将如图4(b)所示的三维生成的远场实验图像数据沿Z 轴方向放大200 倍,得到基于旁瓣光束衍射反演强激光远场焦斑测量的原始图像,如图5 所示,其中最大值为716 730,旁瓣光束第一、第二、第三、第四波峰值分别为12 321、2 978.5、1 148.2、557.2,其中远场焦斑动态范围比值=最大值/第四波峰值,原始图像的动态范围比值=716 730/557.2≈1 286.3。在图3 数据处理流程图中,原始图像作为整个仿真实验流程的输入 图像。
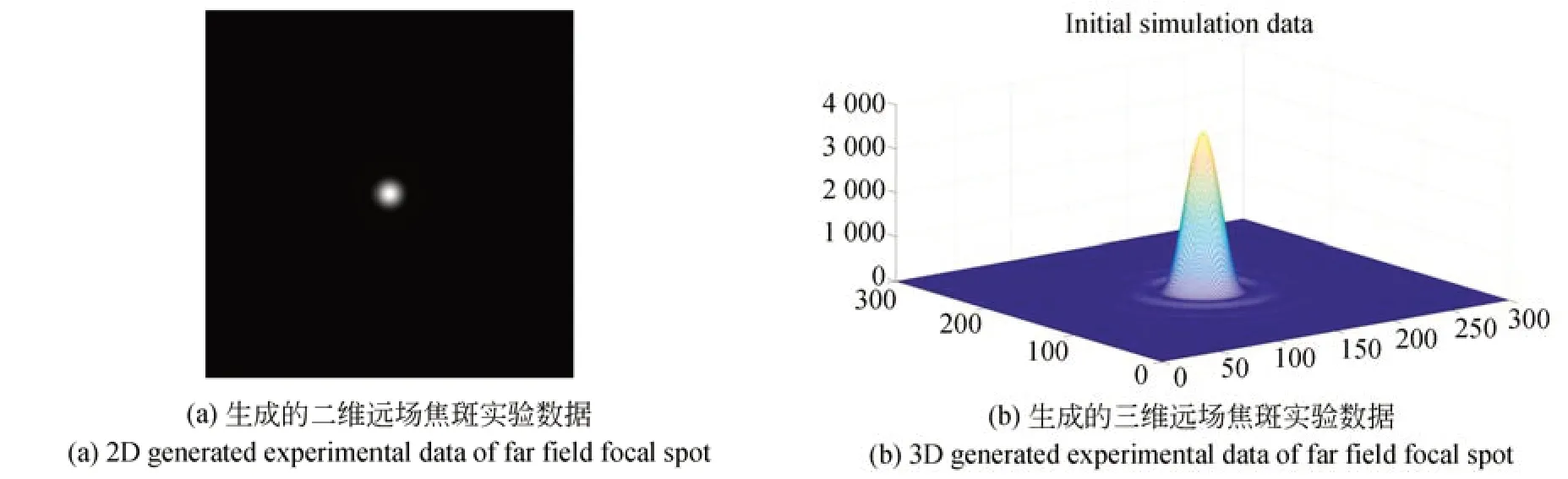
图4 利用仿真参数生成的远场焦斑实验数据Fig.4 Generated experimental data of far field focal spot obtained by simulated parameters
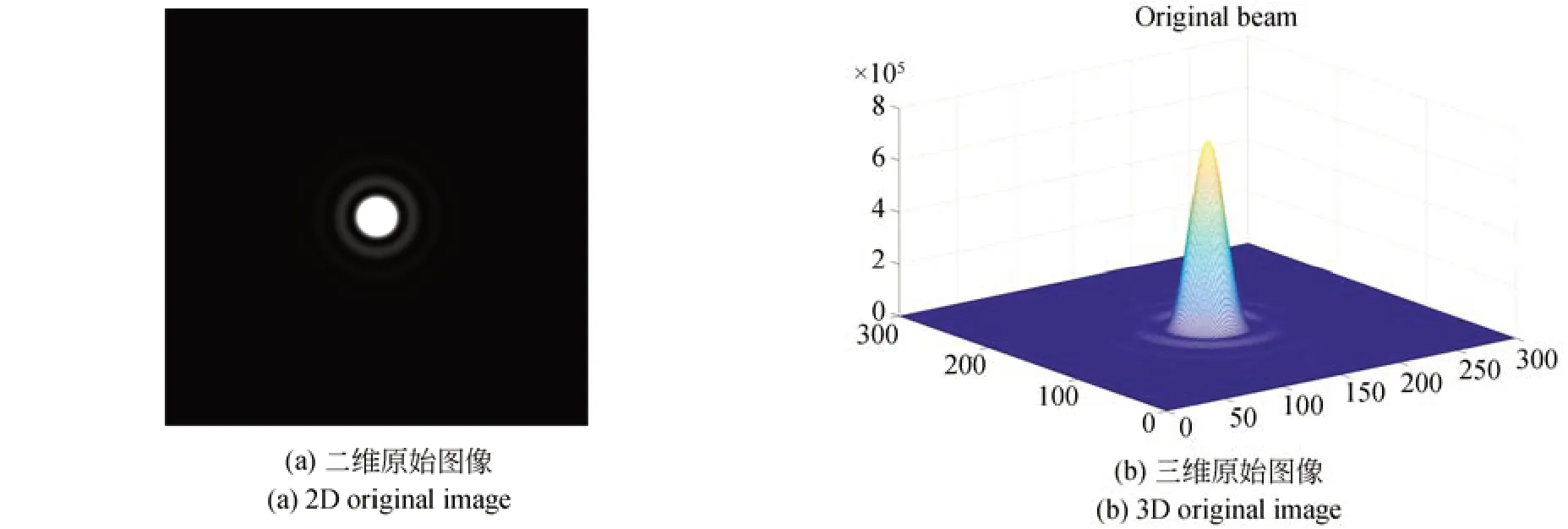
图5 原始图像Fig.5 Original image
3.2 预处理
实验数据预处理就是模拟主光路光束的分光、衰减、旁瓣光束纹影小球遮挡过程,主要步骤为:首先,将原始远场光束按照1∶1 的比例分为主瓣和旁瓣光束,分光处理后光束分布如图6(a)和(b)所示,在 式(1)~式(2)中α=0.5,β=0.5;其次,对分光后的主瓣光束进行大倍率衰减,旁瓣光束衰减倍率为1%,对应式(3)中kz=0.01,主瓣光束大倍率衰减后的图像如图6(c)所示。由于旁瓣光束中心被纹影小球遮挡,剩余旁瓣光束外围区域光束能量相对较小,为了突显旁瓣光束外围区域弱信号的分布特征,选择旁瓣光束的衰减倍率为1,对应式(4)中kp=1。最后,模拟纹影小球对于旁瓣光束的遮挡效果,在纹影小球遮挡位置,当旁瓣光束遮挡后的传输距离z=0 时,将旁瓣光束纹影小球区域内的光强分布设置为0,而旁瓣光束纹影小球区域外的光强分布则保持不变。使用纹影小球遮挡旁瓣光束中心后光强分布如图6(d)所示。

图6 主瓣光束和旁瓣光束焦斑图像预处理结果Fig.6 Preprocessing result of mainlobe and sidelobe beam of focal spot image
3.3 旁瓣光束衍射
纹影小球遮挡旁瓣光束强能量区域会对旁瓣光束产生衍射现象,纹影小球遮挡位置旁瓣光束图像如图6(d)所示。随着衍射后光束的传播,假设传输距离为z=200(单位:mm),则CCD 成像位置的旁瓣衍射光束分布如图7 所示。
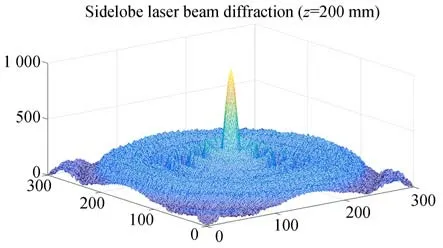
图7 旁瓣光束衍射结果z=200 mmFig.7 Diffraction image of sidelobe beam z=200 mm
3.4 模拟图像采集增加噪声
主瓣光束传输至图像采集位置前,需要经过分束、能量衰减。真实实验条件下主瓣CCD 采集获得包含随机噪声的主瓣图像;仿真实验条件下的等效措施是对主瓣光束仿真图像增加随机噪声。旁瓣光束传输至图像采集位置前,需要经过一次主光路分光、二次旁瓣光束分光、纹影小球遮挡、旁瓣光束衍射。在真实实验条件下,旁瓣CCD 采集获得旁瓣光束衍射光强图像,哈特曼采集获得旁瓣光束衍射相位图像,两个图像都包含随机噪声。在仿真实验条件下,等效措施是对经过两次分光、纹影小球遮挡、旁瓣光束衍射的仿真旁瓣光强和相位图像增加随机噪声。
主瓣光束图像、旁瓣光束衍射相位图像、旁瓣光束衍射光强图像分别增加均方差为250、10、50 的随机噪声,主瓣光束、旁瓣光束衍射相位和旁瓣光束光强衍射图像增加的随机噪声分别如图8(a)、(b)和(c)所示;增加随机噪声后的主瓣光束图像、旁瓣光束衍射相位图像、旁瓣光束衍射光强图像如图8(d)、(e)和(f)所示。

图8 增加随机噪声图像Fig.8 Images of adding random noise
3.5 去除噪声
对主瓣光束图像、旁瓣光束衍射相位图像、旁瓣光束衍射光强图像使用文献[16]所示的改进DnCNN 算法进行去噪处理,如图9(a)、(b)、(c)所示。
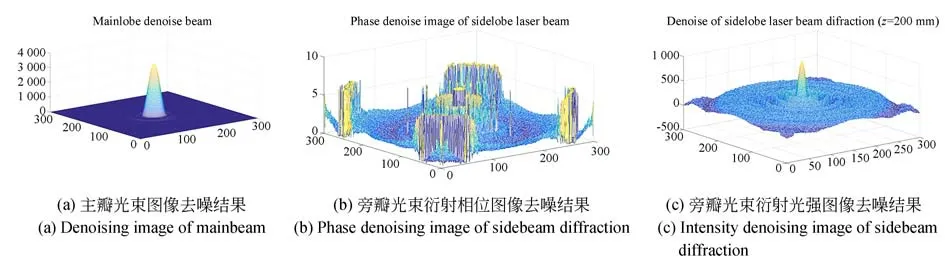
图9 图像去除噪声结果Fig.9 Denoising result of add noise images
3.6 旁瓣光束衍射反演
为了准确获得未遮挡前的旁瓣光束分布,就需要以旁瓣光束衍射相位去噪图像(如图9(b))和旁瓣光束衍射光强去噪图像(如图9(c))作为输入,通过反演运算获得真正未衍射以前的及未遮挡的旁瓣光束分布图像(如图10 所示)。本次实验旁瓣CCD 采集位置距离纹影小球中心位置200 mm。

图10 去噪后的旁瓣光束衍射反演图像z=200mmFig.10 Denoising image of sidelobe beam diffraction inversion z=200 mm
3.7 远场焦斑强度分布重构
远场焦斑重构就是以主瓣CCD 采集图像、旁瓣光束衍射光强图像、旁瓣光束衍射相位图像作为输入完成最终远场焦斑的强度分布重构。本次仿真实验主光路按照等比例分束为主瓣光束和旁瓣光束(α=0.5,β=0.5),主瓣光束和旁瓣光束的衰减系数分别为kz=0.01 和kp=1。因此,主瓣光束光强复原所乘放大倍数为1/(主瓣光束分光比例×主瓣光束衰减系数)=1/(αkz)=200;同样,旁瓣光束光强复原所乘放大倍数为1/(旁瓣光束分光比例×旁瓣光束衰减系数)=1/(βkp)=2。主瓣光束光强复原图像和旁瓣光束光强复原图像分别如图11(a)、(b)所示。
经过主光路分束、光路衰减、旁瓣光束衍射、量化、去噪、旁瓣光束衍射反演等步骤后,依据公式(17)完成远场焦斑重构。重构原则为:重构焦斑主瓣区域使用主瓣光束图像数据填充,重构焦斑旁瓣区域使用旁瓣光束衍射反演数据填充;重构焦斑过渡区域使用主瓣光束图像数据和旁瓣光束衍射反演数据按照一定的比例填充。远场焦 斑 重 构 二 维、三 维 图 像 分 别 如 图11(c)、(d)所示。

图11 远场焦斑强度分布重构结果Fig.11 Intensity distribution reconstructed result of far-field focal spot
4 实验结果及分析
为了验证旁瓣光束衍射反演数学模型在理论上的可靠性,需要对旁瓣光束衍射反演数学模型进行实验仿真,说明该数学模型所需要选择的具体参数和搭建验证实验环境所需要的实验条件。该仿真实验是对章节2.3 中实验仿真步骤“旁瓣光束衍射反演”的进一步分解和细化。将旁瓣光束衍射反演数学模型公式(14)~(16)使用图形化形式所表示的旁瓣光束衍射反演仿真数据处理流程如图12 所示,共分为预处理、旁瓣光束衍射、去噪、旁瓣光束衍射反演4 个步骤。
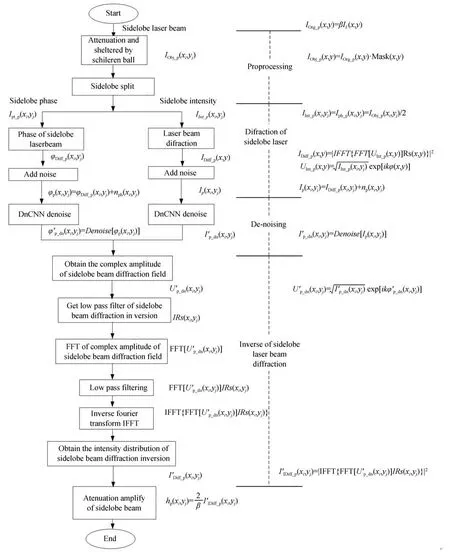
图12 旁瓣光束衍射反演仿真数据处理流程Fig.12 Simulated data processing flow of sidelobe beam diffraction inversion
旁瓣光束衍射反演仿真实验侧重点是分析不同实验参数对于衍射反演结果的影响,主要分为4 个方面:(1)传输距离z对于衍射反演结果的影响;(2)旁瓣衍射光束相位测量对于反演结果的影响;(3)去噪处理对于衍射反演结果的影响;(4)纹影小球大小对于衍射反演结果的影响。本文只是对前3 个因素进行讨论。
在真实的远场焦斑测量实验中,旁瓣光束衍射反演模型由于测量参数是通过估计和探测器测量获得,而估计和探测器测量通常存在误差,为了仿真真实的远场焦斑测量实验环境,分别对旁瓣光束衍射反演模型中的重要参数(噪声、传输距离z、纹影小球直径大小d、旁瓣衍射光束相位φ)增加不同的误差,误差统计如表2 所示。在仿真误差环境下,获得的旁瓣光束衍射反演结果如图13(a)所示,旁瓣光束衍射反演曲线(x=256)如图13(b)所示。

表2 旁瓣光束衍射反演实验误差统计表Tab. 2 Error statistics of sidelobe beam diffraction inversion experiment
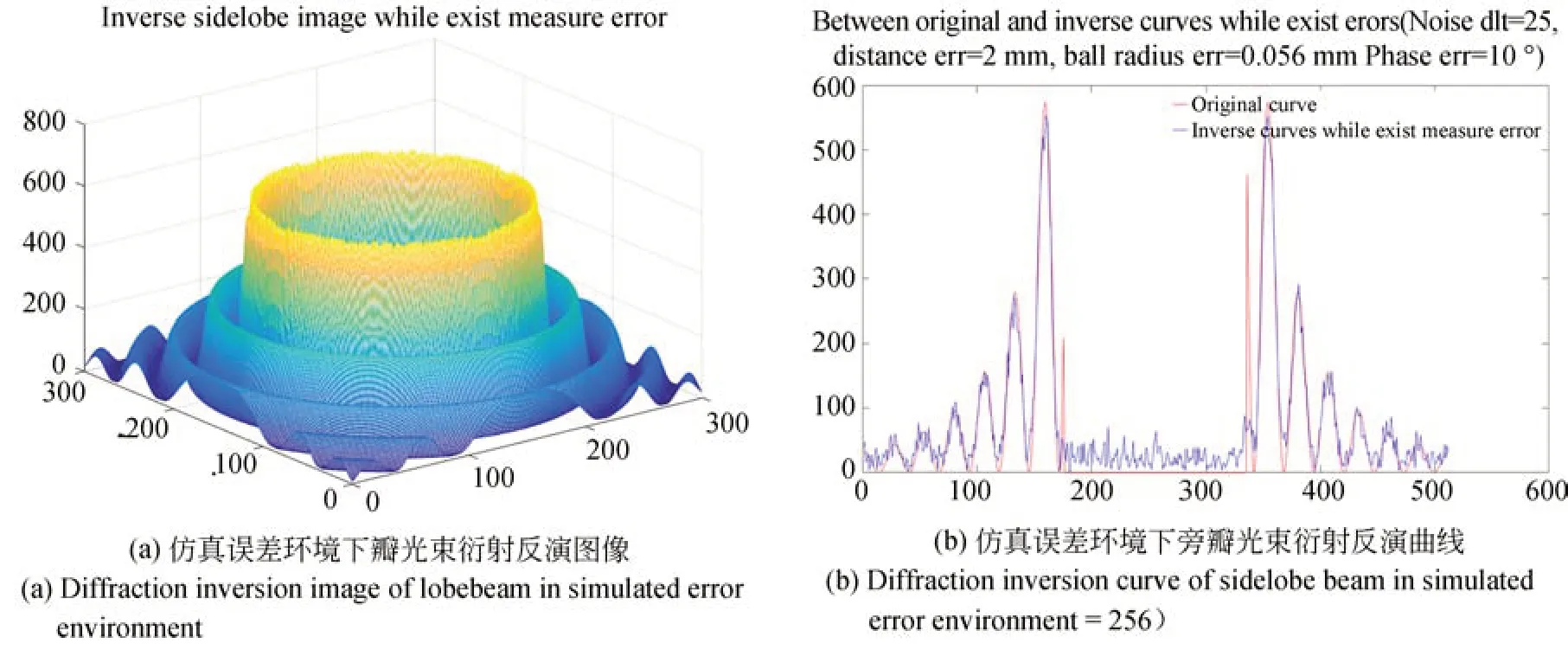
图13 仿真误差环境下的旁瓣光束衍射反演结果Fig.13 Sidelobe beam diffraction inversion results in simulated error environment
从表2 和图13 可以看出,仿真实验中旁瓣光束衍射图像增加了均方差为25 的随机噪声,并通过DnCNN 算法完成去噪处理,作为公式(15)中去噪处理后的旁瓣光束衍射光强分布I'p_dn(xi,yj);传输距离z理论值为200 mm,仿真实验中的传输距离值z=202 mm,误差为2 mm;纹影小球半径d理论值为0.896 mm,仿真实验中的纹影小球半径d=0.392 mm,对应旁瓣CCD 相机80 个像素,误差为0.056 mm;旁瓣光束相位平均值为-59.79°,仿真实验中增加的平均误差为10°。在噪声、传输距离z、纹影小球直径大小d、旁瓣衍射光束相位φ这4 种参数的综合误差作用下,产生的仿真实验结果如图13 所示。从图可以看出,虽然4 个参数与理论值都存在一定的误差,但是在旁瓣有效区域(0 ≤x≤176),旁瓣衍射反演信号与原始旁瓣信号之间波峰和波谷的上升和下降的趋势是十分相似的,这说明将旁瓣光束衍射反演模型应用在真实的远场焦斑测量实验中是值得信赖的。
在表2 中的4 个参数中,对旁瓣光束衍射反演结果影响最大的3 个参数是传输距离z、旁瓣光束相位和CCD 噪声。下面将3 个实验参数对于旁瓣光束衍射反演实验结果的影响进行分析。
4.1 传输距离z 误差对于旁瓣光束衍射反演结果的影响分析
为了讨论传输距离测量误差对于旁瓣衍射反演结果的影响,需要将其他3 个参数固定,噪声均方差σ=25,纹影小球直径d=0.448 mm,旁瓣衍射光束分布φ'(x,y)与理论值误差为0。不同的旁瓣光束传输距离测量误差对于旁瓣光束衍射反演产生巨大的影响,对比结果如图14所示。
从图14 可以看出,传输距离误差z越大,对旁瓣光束衍射反演结果影响越大,当误差大于10 mm 时,旁瓣光束衍射反演曲线中心出现衍射光斑;当误差小于5 mm 时,旁瓣光束衍射反演曲线第1~4 波峰的极大值失真较小;当误差小于1 mm 时,对旁瓣光束衍射反演结果的误差基本可以忽略不计。因此,为了提高旁瓣光束衍射反演的精度,需要保证传输距离z的误差小于1 mm。

图14 不同传输距离误差的旁瓣光束衍射反演结果Fig.14 Inverse curve of sidelobe diffraction beam with different distance error(y=256)
4.2 旁瓣衍射光束相位测量误差对于旁瓣光束衍射反演结果的影响分析
为了讨论旁瓣光束相位测量误差对于旁瓣衍射反演结果的影响,也需要将其他3 个参数固定,传输距离z=200 mm,噪声均方差σ=0,纹影小球直径d=0.448 mm,这3 个参数的取值与各自的理论值相等。当相位误差均方差等于10 度时,旁瓣光束衍射反演结果如图15(a)所示。当对旁瓣光束相位增加均方差为不同度数的相位误差时,对于旁瓣光束反演结果产生不同的影响,对比结果如图15(b)所示。

图15 相位误差对旁瓣光束衍射反演结果影响分析Fig.15 Analysis the influence of phase error on diffraction inversion of sidelobe beam
从图15(b)可以看出,相位误差φ越大,对旁瓣光束衍射反演结果影响越大,当相位误差均方差大于10 度时,旁瓣光束衍射反演曲线完全被噪声淹没;当相位误差均方差小于5 度时,旁瓣光束衍射反演曲线第1~4 波峰的极大值失真较小;当相位误差均方差小于1 度时,对旁瓣光束衍射反演结果的误差完全忽略不计。因此,为了提高旁瓣光束衍射反演的精度,需要保证相位误差z的均方差小于5 度。
为了进一步说明相位测量误差对于旁瓣光束衍射反演结果的影响,在不同相位随机误差情况下的反演结果比较如图16 所示,第一行为理想状态下的反演结果,第二行为相位均方误差MSE=10° 的 反 演 结 果,从 图 可 以 看 出(y=256),旁瓣光束原始曲线和旁瓣光束衍射反演曲线相关系数为0.992 1,第三行为相位均方误差MSE=30°的反演结果,旁瓣光束原始曲线和旁瓣光束衍射反演曲线相关系数为0.938 9。当相位均方误差不同时(MSE<30°),每个波峰在x方向上位置基本上保持不变,只是旁瓣区域各个波峰在y方向上的信号存在差异。当相位均方误差极小时,第一、第二旁瓣波峰和理想波峰差别很小,而第三至第六旁瓣波峰和理想波峰差别会越来越大;当相位均方误差MSE=30°时,第四至第六波的旁瓣波峰已经全部淹没在噪声中,以至于无法区分出来。当旁瓣光束相位值为随机值时,旁瓣光束衍射反演结果如第四行所示;当旁瓣光束相位值为0 时,旁瓣光束衍射反演结果如第五行所示。从图中可以看出,当旁瓣光束相位值为随机值或者某个固定值时,除第一个旁瓣波峰以外,其他的旁瓣波峰的信号都没有反演出来;此外,在纹影小球遮挡区域(176 <x<335),衍射反演曲线中的信号依然很强,在y方向上基本上和第一旁瓣信号相当,这显然与未遮挡前的旁瓣光束信号基本为0 的理论值不符。通过以上分析,可以得到以下结论:(1)旁瓣光束相位测量对于旁瓣光束衍射结果具有非常大的影响,特别是影响旁瓣光束各个波峰信号在x方向和y方向的分布;(2)旁瓣光束相位误差越大,对于第一个波峰以外的波峰的误差影响越大,以至于无法区分出各个旁瓣波峰的分布特征;(3)当旁瓣光束相位测量不准时,在反演结果的纹影小球遮挡区域中依然存在很强的信号,这与未遮挡前的旁瓣光束信号基本为0 的理论值不符,将影响旁瓣第一至第三波峰在y方向有效信号的测量。因此,只有使用哈特曼传感器采集到真实的旁瓣相位信号,才能通过旁瓣光束衍射反演运算实现真正的旁瓣光束弱信号的测量。

图16 相位测量误差对于旁瓣光束衍射反演结果的影响Fig.16 Effect of phase measurement error on diffraction inversion of sidelobe beam
4.3 DnCNN 去噪对旁瓣光束衍射反演结果的影响分析
由于旁瓣CCD 采集到的图像数据是经过纹影小球遮挡、衍射的图像,而且旁瓣CCD 采集的旁瓣衍射图像包含了CCD 相机的噪声。为了准确获得未遮挡以前的旁瓣光束分布,就需要以CCD 采集到的旁瓣光束图像为输入(如图17(a)),首先经过去噪(如图17(c)),后经过反演运算获得真正未衍射以前旁瓣光束分布图像。
4.3.1 对旁瓣光束衍射图像DnCNN 去噪效果分析
使用新的改进措施对旁瓣分光和衰减图像(以下简称旁瓣图像)进行去噪处理。根据参考文献[16]针对DnCNN 算法的改进措施如下:(1)对12 科学CCD 进行预处理,将12 位数据拉伸为0~1 之间double 类型;(2)将DnCNN 算法中所有参数的数据类型转化为double;(3)将去噪处理后的数据减去本底噪声;(4)将去噪处理的double 数据进行灰度等级还原,拉伸至0~4 095之间。
在DnCNN 去噪算法验证实验中,旁瓣图像最大灰度值为754,增加均方差为25 的随机噪声,旁瓣光束衍射图像去噪处理如图17所示。
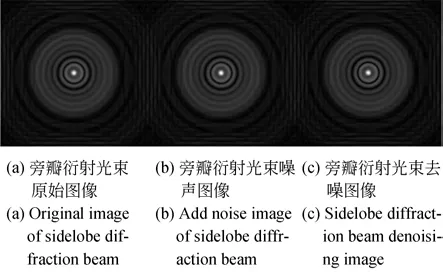
图17 改进DnCNN 算法去除旁瓣光束衍射图像噪声效果Fig.17 Denoise effect of improve DnCNN algorithm on sidelobe diffraction beam addnoise image
旁瓣光束经过纹影小球遮挡后被纹影小球边缘衍射,被衍射后的图像和理论上未遮挡前的光强分布已经完全不同。纹影小球遮挡区域,即旁瓣光束中心区域形成一个明亮光斑;无法找到明显的旁瓣波峰信号,原来旁瓣波峰位置为峰值更加小的衍射环状分布。基于旁瓣衍射图像以上特征,只能从整体上对旁瓣衍射原始图像、加噪图像、去噪图像进行比较说明。通过观察,旁瓣光束衍射去噪图像和原始图像在纹理、波峰形状上完全一致。当旁瓣衍射原始图像增加均方差为25 的随机噪声,使用改进DnCNN 算法去除旁瓣光束衍射图像噪声后,旁瓣衍射原始图像和旁瓣衍射去噪图像之间的相关系数为0.998 83,去噪后的旁瓣衍射光束中心区域能量损失最小,旁瓣光束衍射去噪图像和原始图像最大值之间灰度差值为78.91,误差为7.94%,这说明改进DnCNN 算法对于去除旁瓣光束衍射图像均方差为25 的随机噪声的效果好。
旁瓣衍射图像去噪效果对比(y=256)曲线如图18 所示,图18(a)和(b)中蓝色为原始曲线,绿色为的加噪声曲线,红色为去噪曲线。对旁瓣光束衍射原始图像增加均方差为25 的随机噪声后,在y=256 的水平曲线中,原始图像增加最大值为133.5,比较旁瓣光束原始曲线和去噪后曲线,两条曲线的峰值、轮廓、上升下降趋势完全吻合,两条曲线的相关系数为0.996 9,误差小于4.83%。比较两条曲线的上升沿和下降沿区域,灰度值误差小于2.5,在每个衍射环所在的峰值位置,灰度值误差小于26。由此可见,对于旁瓣衍射噪声曲线来说,改进DnCNN 去噪算法在较大范围上升和下降区域的去噪效果比在极小范围的峰值区域的去噪效果好。去噪曲线旁瓣区域灰度积分和原始曲线旁瓣区域灰度积分的比值为0.951 6。
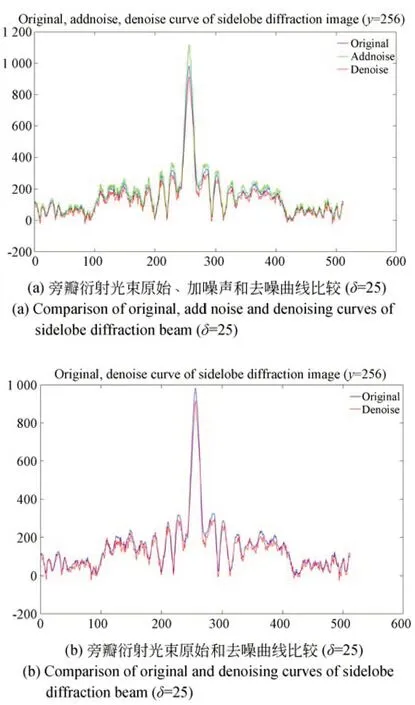
图18 旁瓣衍射图像去噪效果对比曲线(y=256)Fig.18 Comparison of sidelobe diffraction image of denoising effect(y=256)
4.3.2 DnCNN 去噪对旁瓣光束反演结果影响分析
为了说明去噪处理对于旁瓣光束衍射反演精度的提升作用,分别将未去噪的旁瓣光束衍射图像和去噪的旁瓣光束衍射图像分别作为输入,其中旁瓣衍射图像所增加的随机噪声均方差为25,使用公式(15)进行衍射反演运算,处理结果如图19 所示。

图19 旁瓣光束未衍射曲线与旁瓣光束衍射未去噪和去噪反演曲线结果比较(δ=25)Fig.19 Comparison between no diffraction and denoise and addnoise inverse curve of sidelobe diffraction laser beam(δ=25)
从图19 中可以看出,旁瓣光束未衍射曲线与旁瓣光束衍射去噪和未去噪反演曲线之间总体轮廓上相似度很好。特别在旁瓣有效区域,三条曲线之间的上升和下降趋势完全保持一致,只是在旁瓣波峰的极大值位置相差较大。在旁瓣光束第一个波峰(x=160),未去噪反演曲线与未衍射曲线之间的误差为28.4,去噪反演曲线与未衍射曲线之间的误差为-14;在旁瓣光束第二个波峰(x=133),未去噪反演曲线与未衍射曲线之间的误差为28.1,去噪反演曲线与未衍射曲线之间的误差为-2.8;在旁瓣光束第三个波峰(x=107),未去噪反演曲线与未衍射曲线之间的误差为14.5,去噪反演曲线与未衍射曲线之间的误差为-0.7。通过比较可以看出,相比旁瓣光束衍射未去噪处理衍射反演,经过去噪处理后旁瓣光束衍射反演图像与旁瓣光束未衍射曲线之间的信号误差更小。从整体上对三个曲线进行比较,旁瓣光束未衍射曲线与旁瓣光束衍射未去噪反演曲线与之间的相关系数为0.988 5,旁瓣光束未衍射曲线与旁瓣光束衍射去噪后反演曲线之间的相关系数为0.992 1。这说明在衍射反演前首先对旁瓣光束衍射图像进行去噪处理是十分必要的。另外,在纹影小球遮挡区域176 <x<236,旁瓣光束衍射未去噪反演曲线和旁瓣光束衍射去噪后反演曲线分别与旁瓣光束未衍射曲线之间误差大约为12.9,因为在最终焦斑重构过程中,这个区间的信号使用主瓣信号进行替换,对最终焦斑重构结果没有影响,这个区间的误差可以忽略不计。
为了说明当噪声不同时,DnCNN 去噪算法对于旁瓣衍射光束反演结果的影响,将不同均方差噪声情况下的旁瓣衍射光束先去噪后反演的处理结果进行比较,结果如图20 所示。
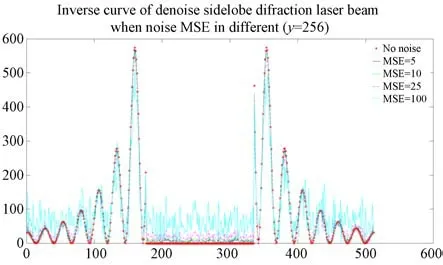
图20 当噪声不同时旁瓣衍射光束去噪、反演结果(y=256)Fig.20 Inverse curve of denoise sidelobe diffraction beam when noise MSE is different(y=256)
从图中可以看出,当均方差噪声小于25 时,经过DnCNN 算法去噪后的旁瓣光束衍射反演曲线与无噪声的旁瓣光束衍射反演曲线相似度高,反演真实度值得信任。当均方差噪声大于100时,经过DnCNN 算法去噪后的旁瓣光束衍射反演曲线与无噪声的旁瓣光束衍射反演曲线相似度低,失真较大,基本上无法反演出有效的纹影小球未遮挡前的、未衍射的旁瓣光束分布图像。
通过以上比较分析,可以得出的启发是:当噪声较小(均方差σ小于25)时,经过DnCNN 算法去噪后的旁瓣光束衍射反演结果是真实可靠的,也就是说,对于旁瓣衍射光束的测量,只有选择低信噪比的科学CCD 进行采集,才能反演出原始的旁瓣光束分布图像,从而为最终获得精确的高动态范围远场焦斑分布图像提供保障。
4.4 旁瓣光束衍射反演对重构结果的影响分析
旁瓣光束衍射反演的反演精度首先反映了对旁瓣光束弱信号区域的测量精度,由于旁瓣光束衰减系数kp=1 且旁瓣光束相比原始光束的比例系数β=0.5。因此,在旁瓣区域最终重构远场焦斑的理论光强是旁瓣光束衍射反演理论光强的2 倍,旁瓣光束衍射反演的精度直接反映了最终重构远场焦斑旁瓣区域的精度。
本次仿真实验选择传输距离z理论值为200 mm,仿真实验中的传输距离z误差为2 mm;纹影小球半径d误差为0.056 mm,旁瓣光束相位的平均误差为10 度,当主瓣图像和旁瓣图像增加随机噪声均方差为25 时,远场焦斑强度分布重构结果如图21 所示。
原始图像的最大值、旁瓣光束第四波峰值分别为716 730、557.2,最大值是第四旁瓣波峰信号的约1 286.3 倍;重构图像最大值、旁瓣光束第四波峰值分别为704 855、530.9,最大值是第四旁瓣波峰信号的约1 328.7 倍。由此可见,在原始图像和重构图像中旁瓣波峰信号相比主瓣光束波峰信号是极小的,为了突出展示原始图像和重构图像旁瓣区域中各个旁瓣波峰的起伏、形状等细节信息,采用放大镜模式对局部区域进行放大展示,所选择的旁瓣弱信号区域如图21(a)用粉色矩形框所示,旁瓣弱信号区域局部放大结果如图21(b)所示。

图21 远场焦斑重构精度分析Fig.21 Reconstructed accuracy analysis of far-field focal spot
根据参考文献[16],远场焦斑动态范围比值为重构焦斑光强分布最大值与第四旁瓣波峰信号值的比值。因此,改进DnCNN 去噪算法对于包含噪声的主瓣光束和旁瓣光束采集图像去噪处理效果是影响动态范围比值精度的重要因素之一。
分析改进DnCNN 去噪算法对于主瓣光束采集图像的去噪效果,选择原始图像和重构图像y=256 时的水平曲线如图21(a)所示,当x=256 时,主瓣原始图像和主瓣去噪图像的灰度值分别为3 583.63 和3 524.31,两个灰度值之间的误差为59.32,这是因为受到去噪处理效果的影响。在本次实验中,主瓣衰减系数和分光比例的乘积αkz=0.005,根据公式(9),当x=256,y=256 时,重构焦斑灰度值和原始图像灰度值之间的误差为59.32/(αkz)=11 864。重构焦斑灰度值和原始图像灰度值之间存在巨大误差的主要原因为:(1)去噪算法对于主瓣图像的误差估计不精确,噪声估计误差越大,则远场焦斑重构误差越大;(2)当主瓣光束经过分光和衰减倍率放大200 倍后,噪声误差也被放大200 倍。由于主瓣光束分光比例和大倍率衰减系数是确定的,所以降低远场焦斑重构误差的最有效方法就是提高主瓣光束图像的去噪精度。此外,主瓣光束选择较小分光比例α和能量衰减系数kz(αkz<10),也有利于提高远场焦斑光强分布的重构精度。
对于重构焦斑的旁瓣波峰来说,以y=256水平曲线为例,在旁瓣第一和第二个波峰区域噪声对焦斑重构的误差最大,如图21(b)和表3 所示,在第一、第二、第三、第四旁瓣波峰位置的误差分别为4 314、1 452、11、26。通过观察发现,原始曲线和重构曲线四个旁瓣波峰之间的误差,从第一波峰到第四个波峰误差依次减少,在第四波峰区间[120,172]两曲线灰度值的误差小于30。对原始图像来说,最大值和旁瓣光束第四波峰值分别为716 730、557.2;对重构图像来说,最大值和旁瓣光束第四波峰值分别为704 855、530.9。因此,远场焦斑光强分布的原始图像和重构图像的动态范围比值分别约为1 286.3 和1 327.7。远场焦斑重构实验动态范围比值的误差和精度分别为42.55 和96.80%。以上对比分析说明,将改进DnCNN 去噪算法用于去除旁瓣弱信号区域的CCD 噪声,能够有效提高远场焦斑重构实验动态范围比值的测量精度。
由于重构焦斑强度分布最大值为704 855,重构焦斑旁瓣光束强度分布范围处于0~4 314之间。在图21(b)中,虽然使用放大镜模式对局部区域进行放大展示,但该图中没有包含重构焦斑强度分布最大值信息,使用放大镜模式不仅能够展示重构焦斑强度分布最大值、四个旁瓣波峰灰度值,而且能够突出旁瓣区域中各个旁瓣波峰的起伏、形状信息,本文选择对数运算函数lg 变换重构焦斑和原始焦斑强度分布水平曲线(y=256)的灰度值,两曲线的变换结果对比如图22 所示。重构焦斑和原始焦斑中的最大值、四个旁瓣波峰灰度值、动态范围比值对比如表3所示。对数运算函数lg 变换后原始焦斑和重构焦斑水平曲线(y=256)最大值分别用Cmax和Mmax标识,对应数值分别为5.855 4 和5.848 1,原始焦斑水平曲线(y=256)第一、第四旁瓣波峰等用S1max和S4max标 识,对 应 数 值 分 别 为4.091 和2.746,重构焦斑水平曲线(y=256)第一、第四旁瓣波峰等用M1max和M4max标识,对应数值分别为3.904 和2.725。

表3 重构焦斑和原始焦斑动态范围比值误差比较Tab.3 Comparison of dynamic range ratio errors between original and reconstructed far-field focal spot

图22 原始焦斑和重构焦斑强度分布水平曲线(y=256)灰度值对数变换结果对比Fig.22 Comparison of logarithm transform result of intensity distribution between original and reconstructed horizontal curve(y=256)of far-field focal spot
对数运算变换后原始焦斑和重构焦斑水平曲线(y=256)最大值、第一、第二、第三、第四旁瓣波峰之间的误差分别为-0.007 3、0.187、0.290、0.004 和0.021。对应灰度值误差分别为11 875、4 314、1 452、11、26。由此可见,对数运算变换前后都是第三波峰误差最小。
根据参考文献对动态范围比值定义[16],重构焦斑的动态范围比值和误差与第一个和第二旁瓣波峰的误差无关,仅与重构焦斑强度分布最大值和第四旁瓣波峰的灰度值相关。焦斑强度分布原始图像动态范围比值=(10Cmax-S4max)∶1≈1 286.47∶1,重构焦斑图像动态范围比值=(10Mmax-M4max)∶1≈1 327.70∶1,两个动态范围比值之间的误差约为3.20%。
通过全流程仿真基于旁瓣光束衍射反演的强激光远场焦斑测量实验过程,共包含7 个实验步骤,特别增加了针对旁瓣光束弱信号区域光强分布精确测量问题而设计的旁瓣光束衍射反演步骤,该步骤能够有效消除因纹影小球遮挡产生的对于旁瓣光束强度分布的影响。此外,对于旁瓣光束衍射相位图像、旁瓣光束衍射光强图像使用改进的DnCNN 算法进行去噪处理,有效去除了因为旁瓣光束相位和光强图像采集时,分别叠加在哈特曼和旁瓣CCD 相机中的随机噪声。在本次强激光远场焦斑测量仿真实验中,重构焦斑和原始焦斑之间的相关系数大于0.998,重构焦斑和原始焦斑两个动态范围比值之间的误差小于4%。由此说明,基于旁瓣光束衍射反演的强激光远场焦斑测量方法不仅能够提高旁瓣光束弱信号区域光强分布测量精确,而且能够从整体形貌上提升远场焦斑光强分布与理论焦斑光强分布的相似度和重构精度,从而进一步验证了该方法在理论上的合理性和实验上的可行性。
5 结 论
针对大型激光装置使用纹影法测量强激光远场焦斑存在无法解决旁瓣区域弱信号精确测量的问题,提出了基于旁瓣光束衍射反演的纹影法强激光远场焦斑测量方法。采用逆向推演间接测量的研究方法,沿光路传播方向逆向推导,以旁瓣光束衍射光强图像和相位图像作为输入,通过计算获得未遮挡前旁瓣光束远场焦斑分布。为了进一步提高激光装置的实验性能和测量精度,在以下三个方面进行改进和优化:在理论方面,构建基于旁瓣光束衍射反演的纹影法强激光远场焦斑测量数学模型,从理论角度揭示该数学模型和旁瓣光束衍射反演方法的合理性;在实验方面,将数学模型构建和实验仿真相结合证明新数学模型的可靠性;改进DnCNN 去噪算法,可去除不同噪声级别(0~75 dB)、12 位科学CCD 图像的噪声,以提升焦斑测量的实验精度。总之,本文采用旁瓣光束衍射反演的方法进行强激光远场焦斑精确测量的研究,探索提高旁瓣光束弱信号区域准确测量的问题,对揭示强激光远场焦斑分布测量值与理论值之间的规律具有重要意义,为将来大科学激光装置的强激光远场焦斑的 精确测量奠定了基础。
