基于无线传感器测量的转换装置同步控制系统研究
2022-03-10王赵帅刘丽媛王阔传
王赵帅,邢 然,刘丽媛,王阔传,韩 琪
(1. 北京航天发射技术研究所,北京,100076;2. 北京航天计量测试技术研究所,北京,100076)
关键字:活动发射平台;转换装置;无线传输;同步控制
0 引 言
活动发射平台转换装置用于实现平台行走状态和定位状态间的转换,行走状态下发射平台载荷作用于轮组,到达发射阵地后,通过转换装置触地顶升活动发射平台本体令轮组离地,使得火箭加注及起飞时对活动发射平台的载荷通过转换装置传导至地面,减轻行走装置及轨道的压力。转换装置动作是基于“三垂”发射方式的运载火箭在发射测试流程中必要动作,转换装置的同步控制是活动发射平台关键技术之一。
转换装置控制系统采用基于可编程逻辑控制器(Programmable Logic Controller,PLC)的集中控制方案,为提高系统灵活性和维护性,减少系统配套电缆数量,提升状态转换流程工作效率,采用基于无线传感器测量方式实现转换装置高度反馈测量。本文着重对无线测量传输技术及转换装置全自动同步控制策略进行介绍。
1 转换装置控制原理
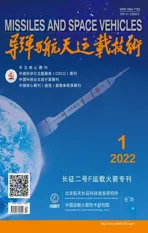
转换装置采用多个支腿同步升降方式实现状态转换,由液压马达驱动大负载螺旋传动机构完成升降动作。转换过程分为预升、同升、同降、回收4个流程,预升过程中通过预设高度值控制各支腿触地,为同升动作做准备,同升动作时各支腿同步运动将平台顶升至预设高度,同降、回收动作是同升、预升动作的逆流程。转换装置动作流程如图1所示,各动作流程可在控制系统控制下自动完成。
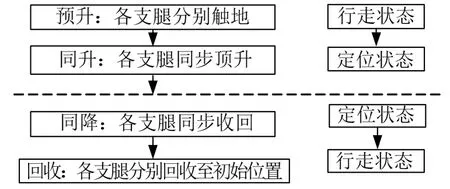
图1 转换装置动作流程Fig.1 Action Flow of the Conversion Device
活动发射平台转换装置支腿分布及控制原理示意如图2所示。为方便描述转换装置各支腿的位置及运动方向,按如图顺序标记支腿编号为1~8号。
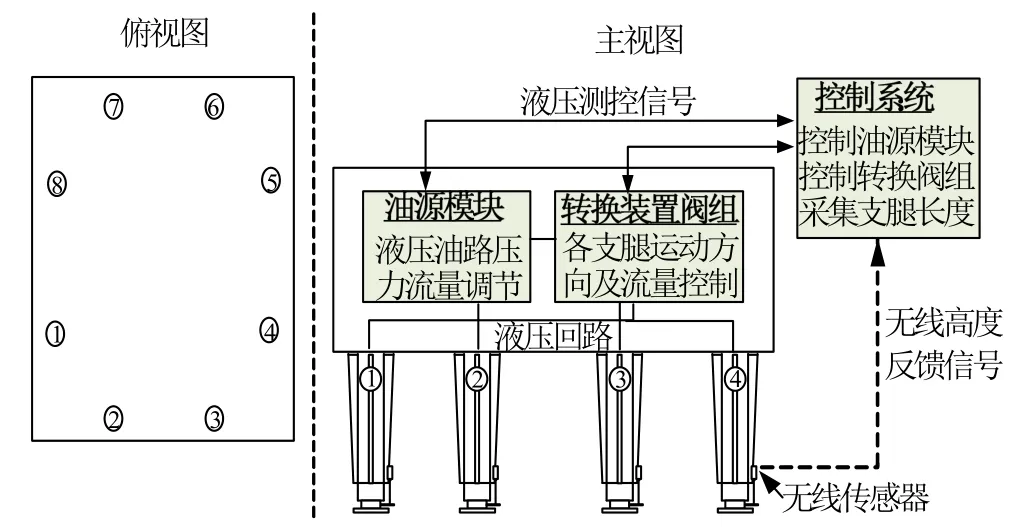
图2 转换装置支腿分布及控制原理Fig.2 The Distribution of the Legs and the Control Principle of the Conversion Device
活动发射平台采用八点支撑,同升动作属于过自由度运动,为避免因运动不同步导致箭体姿态变化或应力集中,同升过程中需对各支腿的伸长量进行同步控制,保证各支点在同一水平面内动作。各支腿均安装位移传感器用于实时反馈支腿伸长量,为同步控制提供依据。基于无线传感器测量的同步控制系统组成如图3所示,系统主要由拉线位移传感器、无线发射设备、无线接收设备、主控计算机、可编程逻辑控制器(PLC)、放大板等部分组成。
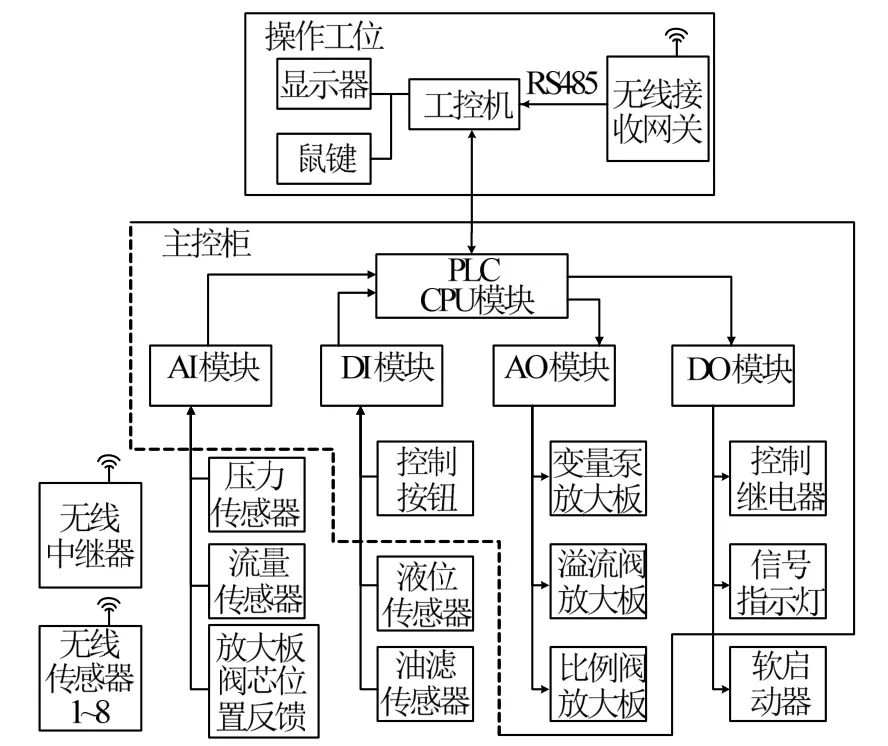
图3 转换装置控制系统组成Fig.3 Composition of the Conversion Device Control System
转换装置运动过程中,控制系统同时控制各支腿油路的比例方向阀,通过调节液压马达流量实现各支腿运动速度的控制。拉线位移传感器用于测量各支腿伸长量,测量结果经无线发射设备转换为无线信号发出,无线接收设备接收无线信号并通过RS485串行总线将信号传输至主控计算机,实现对各支腿的位置监测。主控计算机与PLC组成控制核心,用于运行同步控制算法,完成同步控制。
2 无线传感器测量技术
无线传感器测量技术在火箭测发控领域取得了一定的应用,如发射塔架位移以及温湿度监测、火箭燃料加注监控等,主要用于解决地面电缆网布设困难的问题。将无线传输测量技术引入活动发射平台转换装置控制系统中,可以使系统布置更加灵活,且测量系统节点数量的变化不影响系统整体架构,系统灵活性、拓展性强,传感器布置、撤收方便,易于维护维修,有助于提升流程效率。
2.1 无线测量原理
无线传感器测量子系统由无线网关、无线中继器、无线传感器节点等设备组成,通过射频通信技术实现无线测量系统内的时钟统一和信号传输。系统采用SUB-1G射频技术,无线设备配备鞭状天线,在满足控制系统实时性与通讯速率要求的同时,具备较好的抗遮挡能力和较远的通信距离。
无线传感器测量子系统数据流向图如图4所示。
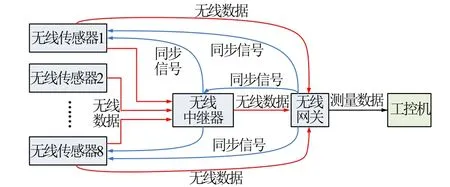
图4 无线传感器测量子系统数据流向图Fig.4 Data Flow of Wireless Sensor Measurement Subsystem
无线测量子系统数据流向及工作流程如下:
a)无线网关加电后发送无线同步信号,中继器和各无线节点接收无线同步信号;
b)中继器接收无线同步信号后即刻转发同步信号,无线节点接收到网关或中继器的同步信号后完成时间同步;
c)完成时间同步的节点按系统统一时间基准,分时发送测量数据,不同节点间按照分时复用(TDMA)方式完成无线数据发送;
d)节点发送的测量数据可直到无线网关,也可经过中继器转发后到达无线网关;
e)网关接收到测量数据后通过485串行总线定时发送至控制计算机。
无线中继器、无线传感器节点由内置可充电电池供电,为确保无线测量设备电池能量满足单次任务流程的使用需求,系统分为实时工作模式和休眠模式。
实时工作模式下,无线测量系统内各节点完成时钟同步,无线传感器定时发送测量数据,中继器接收数据包后进行转发。休眠模式下,无线测量系统处于无线电静默状态,节点耗电电流可控制在μA级。无线采集器和中继器定时开启射频接收,搜索到同步信号后激活,转为实时工作模式。
2.2 冗余抗干扰技术
活动发射平台控制系统对可靠性和信息传输实时性有较高要求,为同时保证实时性和可靠性要求,无线传感器测量子系统采用了频分多址(FDMA)和时分多址(TDMA)相结合的冗余抗干扰技术。
TDMA指以信号传输时间的不同建立多址的方式。无线传感器测量系统以同步时钟技术为基础,确保无线网关、中继器和无线传感器节点在同一时间基准下工作,在此基础上将传输信道进行时间分割以传送若干话路信息,系统按一定次序轮流给各节点分配一段利用信道的时间。FDMA指把总带宽分隔为多个正交信道,各节点可利用正交信道实现信息冗余传输。
本系统采用TDMA与FDMA结合的冗余抗干扰通讯技术,在时钟同步的基础上通过TDMA实现信息传输的强时效性,通过跳频技术实现数据传输的冗余。跳频技术实现FDMA最大的技术难点在于系统内部各独立部分跳频时间的同步,本系统采用令牌式的协调机制,网关发出的同步数据包包含同步信息和跳频次序表,信号收发方在统一的时钟下按顺序同步跳频,实现同步收发。冗余抗干扰通信流程示意如图5 所示。为避免对发射场其他无线通信设备造成干扰,选用914~917 MHz频段进行跳频。

图5 冗余抗干扰通信流程Fig.5 Redundant Anti-jamming Communication Process
2.3 错误陷阱技术
控制系统通过冗余抗干扰技术保证无线通信可靠不受到外部干扰,但是在极端恶劣的环境下,数字系统的内部时序、存储的关键数据仍有可能受到干扰导致错误,影响系统的功能实现及设备安全。控制系统采取了错误陷阱技术来防止极端情况发生。错误陷阱技术可分为3个层次:
a)错误重启技术:监测到关键数据错误、关键故障时,系统重启并重新组网,可能会导致小部分数据丢失,但是重启后系统可重新正常工作;
b)错误丢弃技术:监测到数据错误,系统自动丢弃该数据;
c)错误恢复技术:监测到系统错误,系统能够对错误进行修正并恢复工作。
控制系统采用错误重启技术和错误丢弃技术应对无线测量系统极端错误情况。系统设计的错误重启技术能保证1 s内整个系统恢复正常工作,如系统监测到空中数据包错误,采取丢弃的方式,由于本系统中无线信道的冗余性,数据不会丢失,系统仍可正常工作。
为验证错误监测技术和错误陷阱技术有效性,系统研制过程开展了大量的在极端情况下的错误模拟测试(见表1)。试验表明错误陷阱技术可很大程度避免极端情况对控制系统影响,使系统具备自我恢复能力。

表1 极端情况下模拟试验结果Tab.1 Simulation test Results in Extreme Cases
为保证系统在极端情况系统的可靠工作,本系统所有单机均设计了两路看门狗计时器(WDT),其中单片机采用内部自带的WDT,其复位周期为软件可调,另外单机内单片机复位电路上连接了一个硬件WDT,其复位周期为硬件设置,软件不可设置。
在系统设计中,内外WDT采用了分级设计机制,即如果出现故障,内部WDT先行启动,在内部WDT不能正常工作的时候,外部WDT强制系统复位,后续软件机制保证问题单机或者整个系统的正常工作。双重的WDT机制保证了系统能够可靠快速恢复故障。
3 同步控制流程及算法
转换装置控制系统采用全自动主从同步控制策略实现各支腿的位置同步性控制。主从同步指多个需要同步运动的对象以其中一个对象的输出作为基准,对其进行跟踪以达到运动同步。控制系统可根据目标值自动调节各支腿运动状态,到达目标值后自动停止流程,实现“一键式”控制。
3.1 控制流程
控制系统通过控制各支腿液压回路比例方向的开度调节其运动速度,系统以1号支腿伸长量为参考进行主从同步控制。转换装置降的过程为动作反向,控制原理及策略一致。本节主要以升过程为例进行描述,预升、同升控制流程示意如图6所示。

图6 预升、同升控制流程Fig.6 Control Process of the Pre-upgrade and Synchronous-upgrade
转换装置在初始位置先进行预升控制流程。控制系统依据测得的预升高度值分别控制各支腿启停。当任意转换装置支腿到达预升设定高度后,该转换装置停止运动,直到8组支腿均到达设定高度后,预升流程自动停止。
同升动作以预升动作确定平面为基准,设定同升目标值后可实现全自动同步控制,执行以1号支腿伸长量为基准的自动同步闭环控制运动。运动过程中2~8号支腿伸长量若大于判断阈值上限则降低相应支腿的比例阀开度,进而降低运动速度,反之亦然。当8组转换装置均达到设定同升高度后,同升过程自动停止。
3.2 同步控制算法
转换装置全自动同步控制算法分为同步控制算法和位置控制算法两部分,控制原理示意如图7所示。

图7 同步控制原理框图Fig.7 Principle of Synchronous Control
控制系统对液压的输出流量进行控制。采用PID调节参数:根据经验范围,设定基本的初值,通过模拟或闭环运行观察系统的响应曲线,然后根据各环节参数对系统响应的大致影响,反复凑试参数,以达到满意的响应,从而确定PID参数。反馈误差参量为位移。建立公式模型如下:
控制系统对液压的输出流量进行控制。采用PID调节参数:根据经验范围,设定基本的初值,通过模拟或闭环运行观察系统的响应曲线,然后根据各环节参数对系统响应的大致影响,反复凑试参数,以达到满意的响应,从而确定PID参数。反馈误差参量为位移。建立公式模型如下:

式中,分别为标准支腿(1号支腿)的初始高度和实时测量高度;,分别为随动支腿(2~8号支腿)初始高度和实时测量高度;,分别为标准腿、随动腿的高度变化值;为偏差比例系数;Δ为位置反馈PID中的偏差值;为初始设定流量值;为流量调节系数,依据经验获得;′为调整后的流量值。
控制过程中选取固定转换装置为标准支腿作为基准,将其动作曲线认为是理想曲线;随动支腿作为跟随,按照理想曲线调整。计算随动支腿和标准支腿的变换高度误差,将误差Δ反馈到随动支腿的流量控制中,反复调整得到最佳的输出曲线。同时在同步控制过程中对误差Δ进行监控,使其保持在±0.5 mm的范围内,保障同步控制误差精度。
4 试验结果
前文介绍的基于无线传感器测量的转换装置同步控制系统在某型号活动发射平台上得到了应用,其中无线测量部分采用拉线位移传感器与无线发射模块结合的形式实现位移信号的无线传输,且无线模块具有与多种传感器配合的能力,接口灵活、拓展性强。
首先对无线传感器测量子系统通讯距离及可靠性进行测试,测试结果如表2所示。从表2中可以看出无线传感器测量子系统具有较大的传输距离和较强的抗干扰能力,系统的冗余抗干扰技术可有效保证数据传输的可靠性、稳定性。
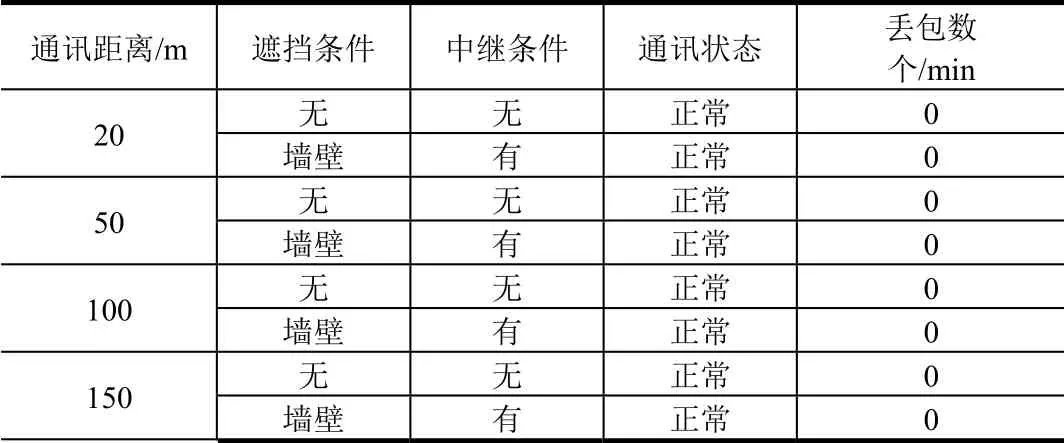
表2 无线传感器测量子系统可靠性现场试验Tab.2 Reliability Test of Wireless Sensor Measurement Subsystem
在一定流量、压力下启动同升流程,设定同升期望值为30 mm,同升过程位移偏差阈值指标为0.5 mm,即随动支腿与参考支腿的位移偏差不超过±0.5 mm。同升过程中各支腿的位移-时间变化曲线如图8a所示,运动过程中随动支腿与标准支腿最大位置偏差绝对值曲线如图8b所示。
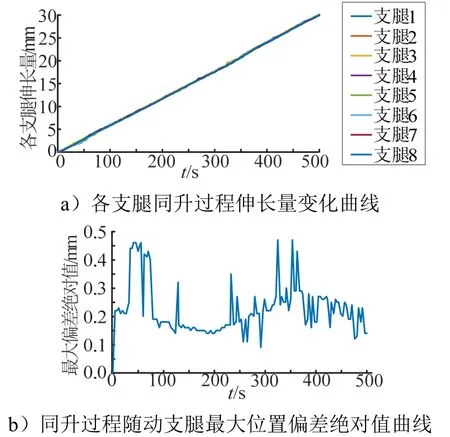
图8 同升过程数据曲线Fig.8 Data Curve of the Synchronous-upgrade Process
从图8可以看出,试验结果与控制策略一致,随动支腿以标准支腿伸长量为参考自动调整运动速度,运动同步性良好,最大位移偏差为0.46 mm,满足同升位移偏差阈值要求。
5 结 论
本文首先介绍了运载火箭活动发射平台转换装置的系统组成和控制原理,阐述了引入无线传感器测量技术的背景和目的,在此基础上详细介绍了无线测量子系统的测量原理和冗余抗干扰技术、错误陷阱技术等可靠性保障技术,介绍了控制系统组成及多支腿全自动同步控制策略与算法,经过实际测试试验表明,无线测量子系统通讯可靠性良好,控制策略及算法满足转换装置同步控制指标要求,实现了系统配套优化和效率提升的目标。该系统已经应用于某型号活动发射平台中,并完成了火箭的发射任务。